
Status: just a draft
Updates:
- 2021/01/14: quick start with a rough draft
Introduction
Well, after the IDEX option designs – still as drafts – worked for Ashtar K (Prusa i3), Ashtar M (Moving Gantry) and Ashtar D (Classic XY), I thought, why not also target Ashtar C (Core XY).
Ashtar D IDEX is definitely a narrow design, so I thought to reuse two parts of it for Ashtar C as well, and hopefully the A and B belts route around – and well, it seems mechanically to work out.
On the firmware part it seems this CoreXY plus additional X motor is called CoreXYU and supported by Duet RepRap firmware – but details need to be researched in more depth. On the first glance the “traditional” CoreXYU setup routes the U belt off the X beam and not place a motor on it as I do, but routes at the end of the frames so the motor is stationary – definitely something also to look at.
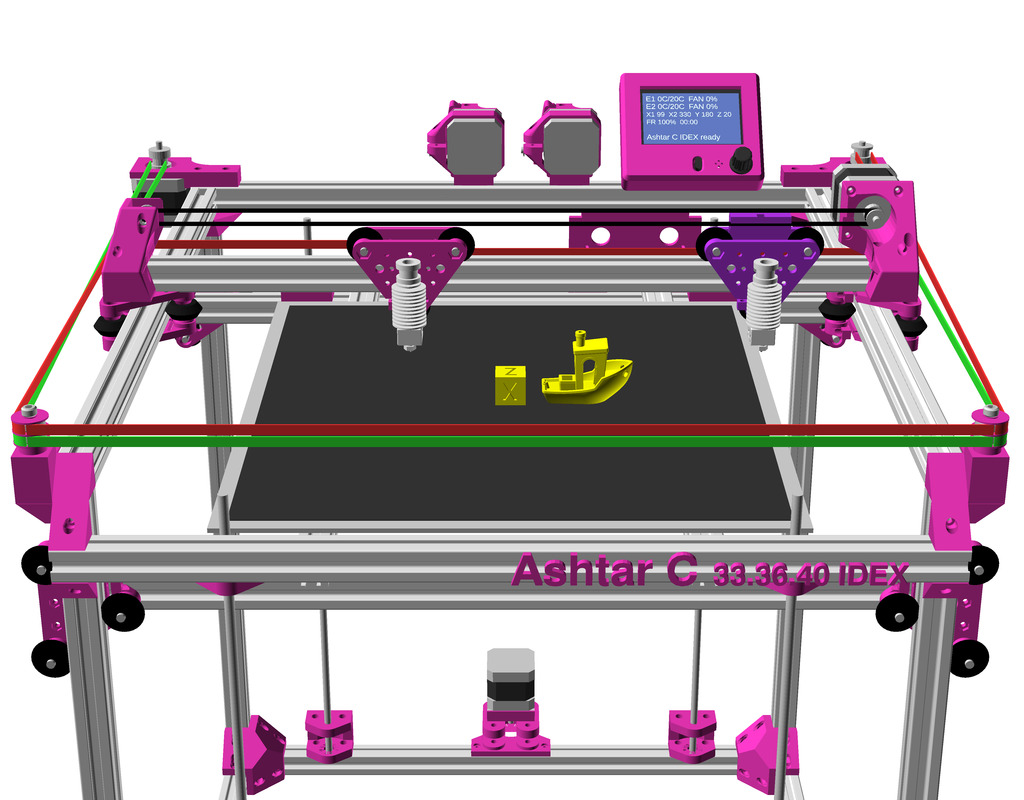
Draft
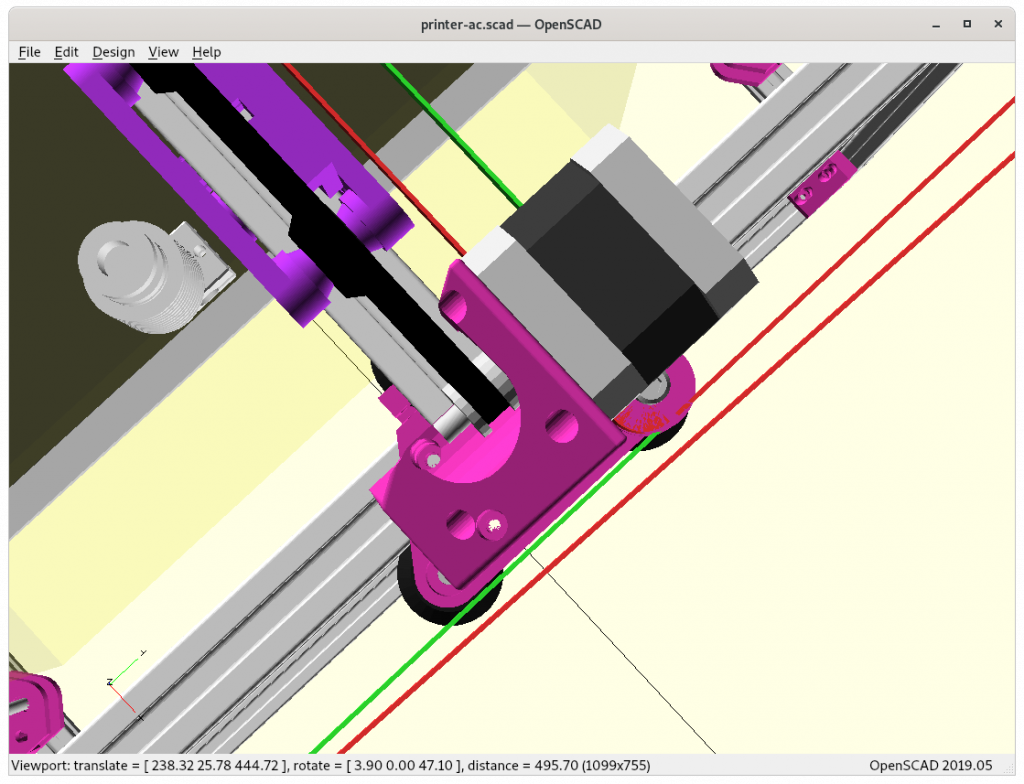
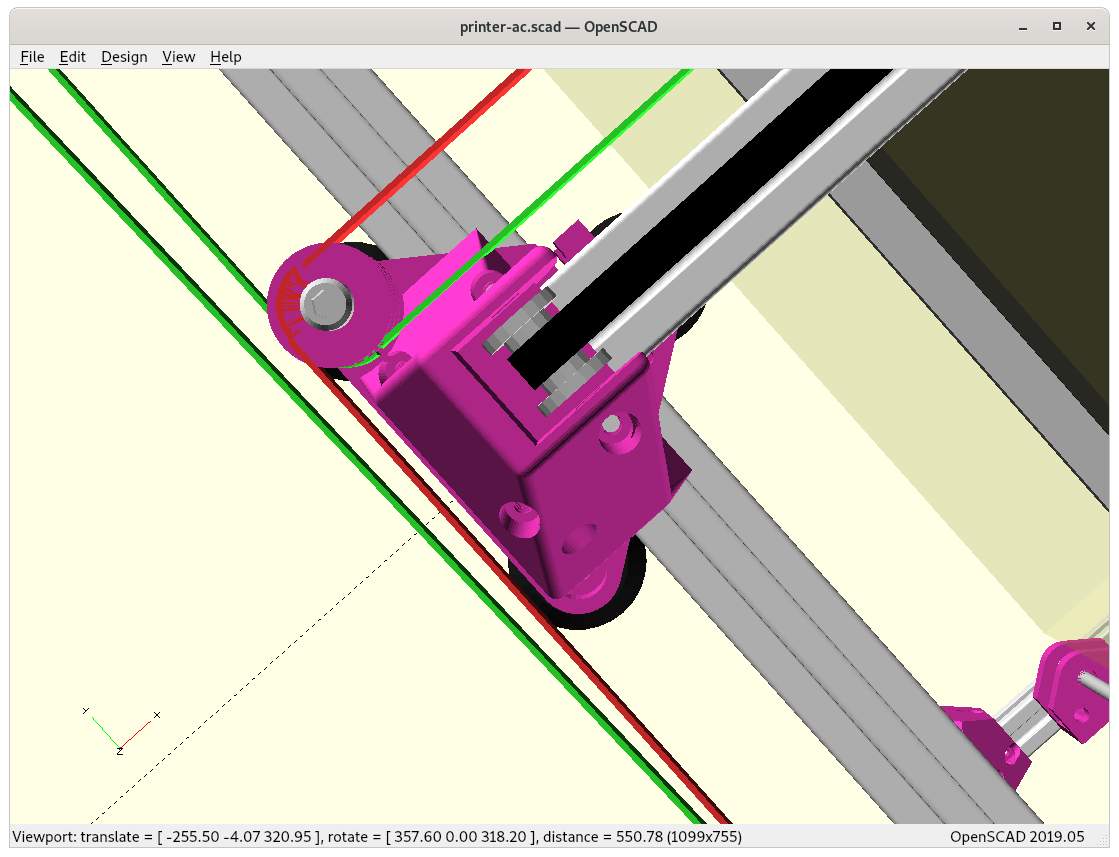
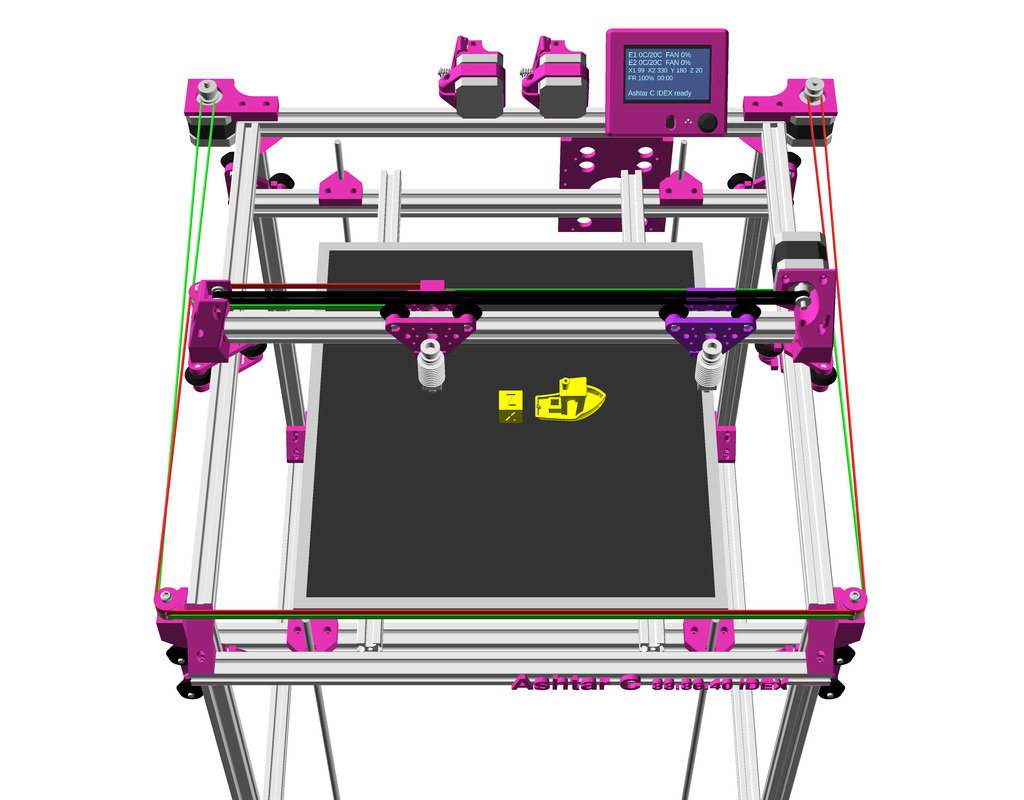
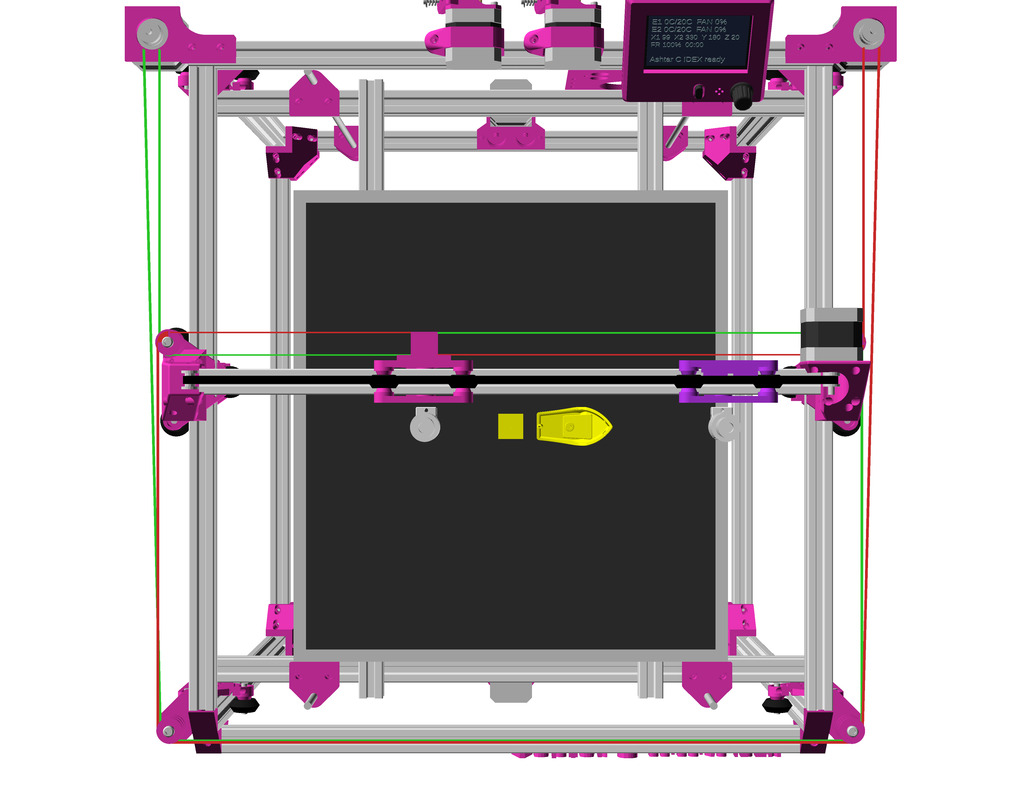
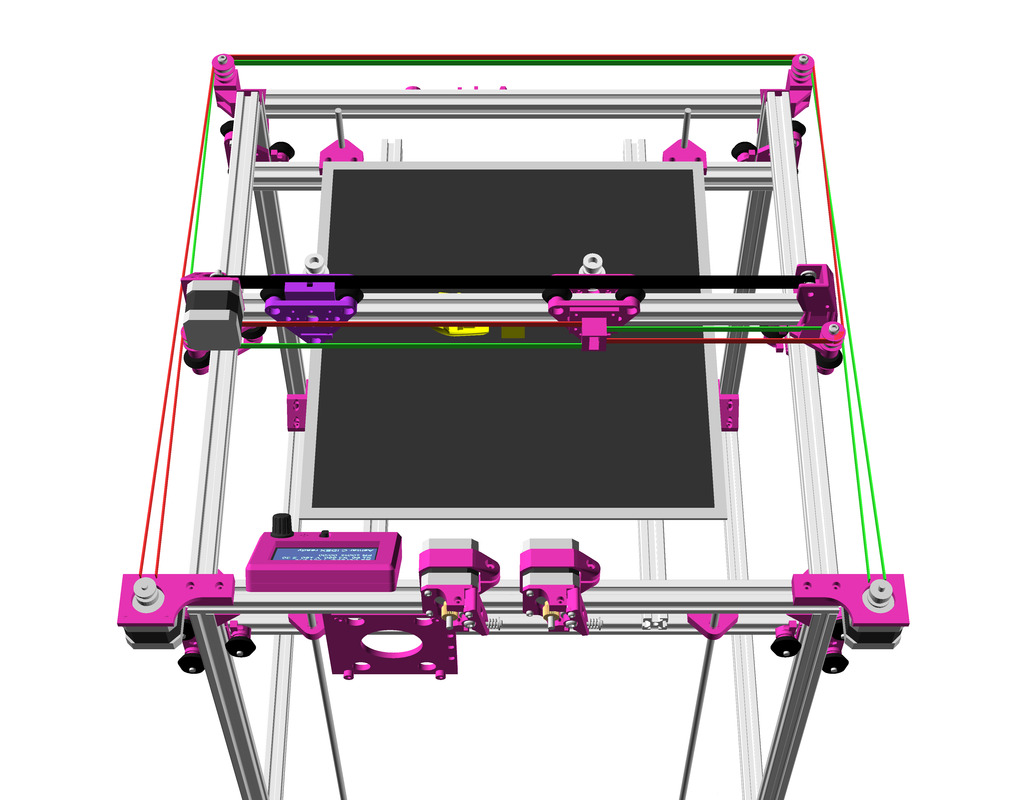
The A/B belts route around the new X motor mount (borrowed from Ashtar D design) 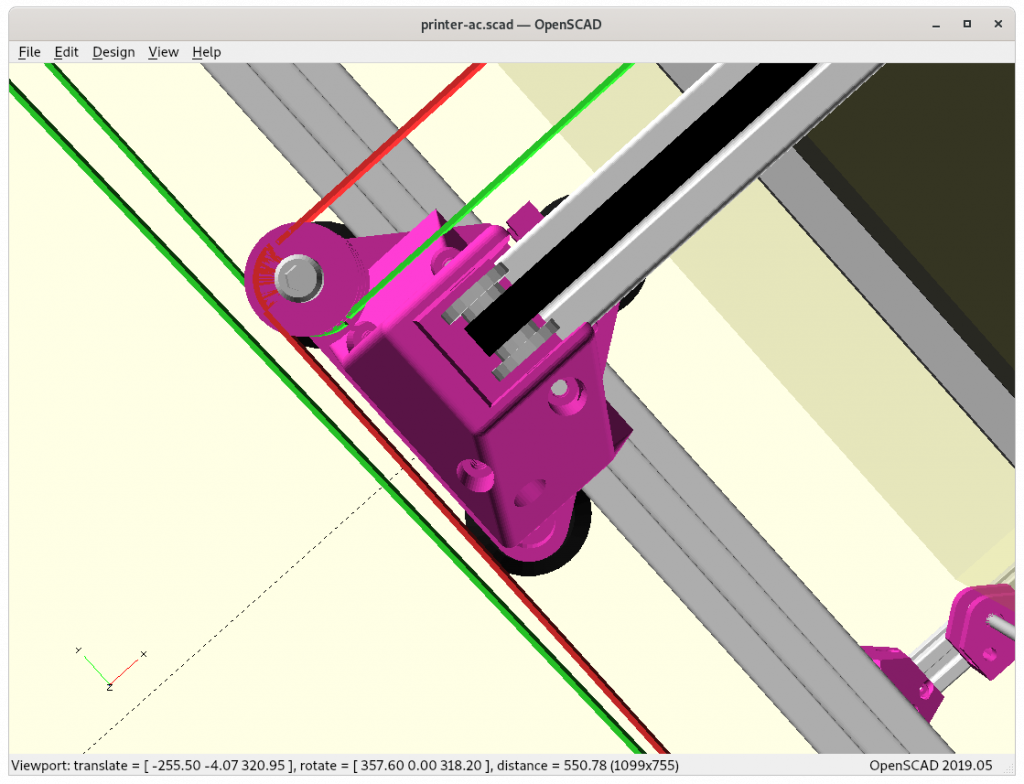
. .. and also around the X idler holder. 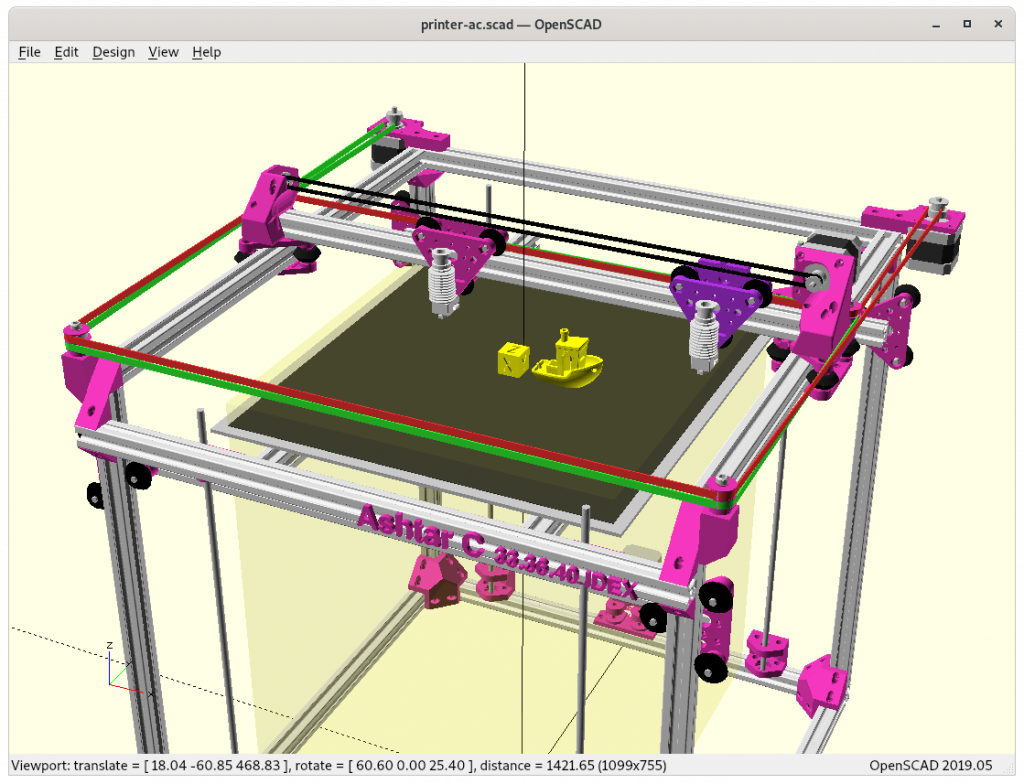
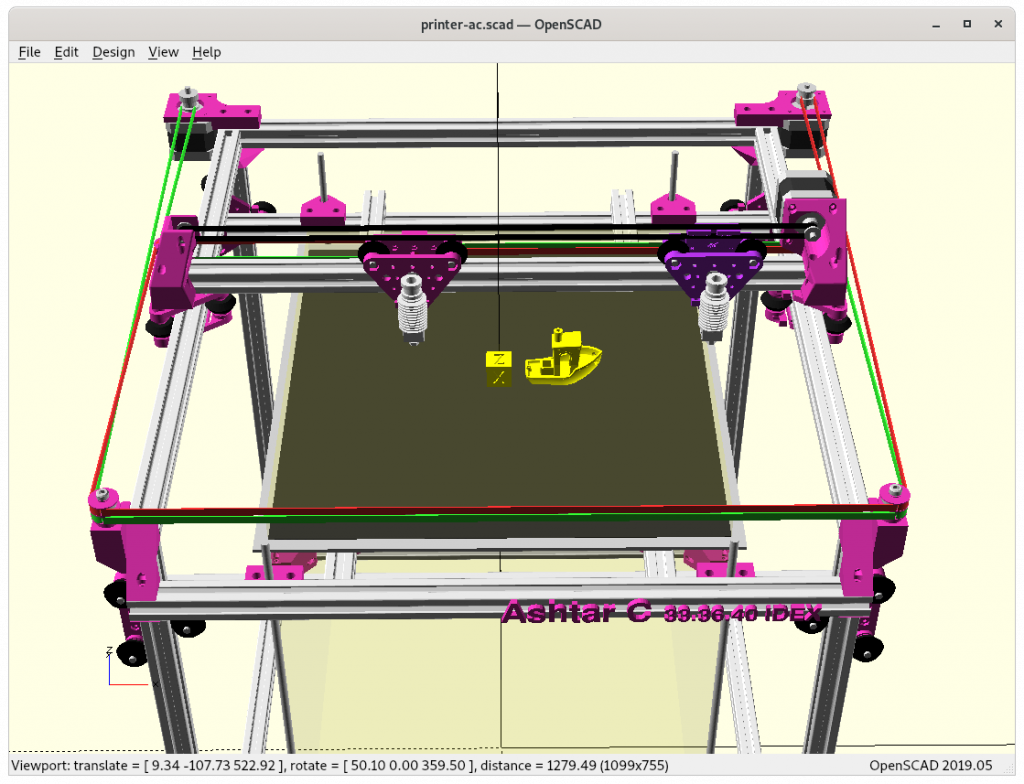
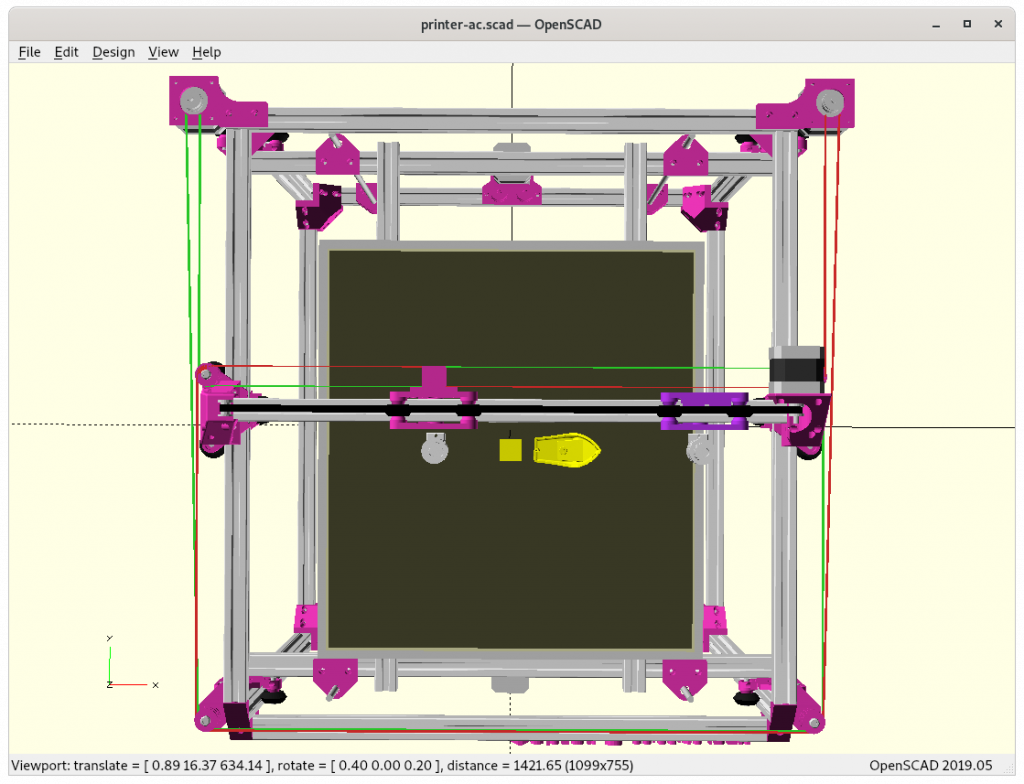
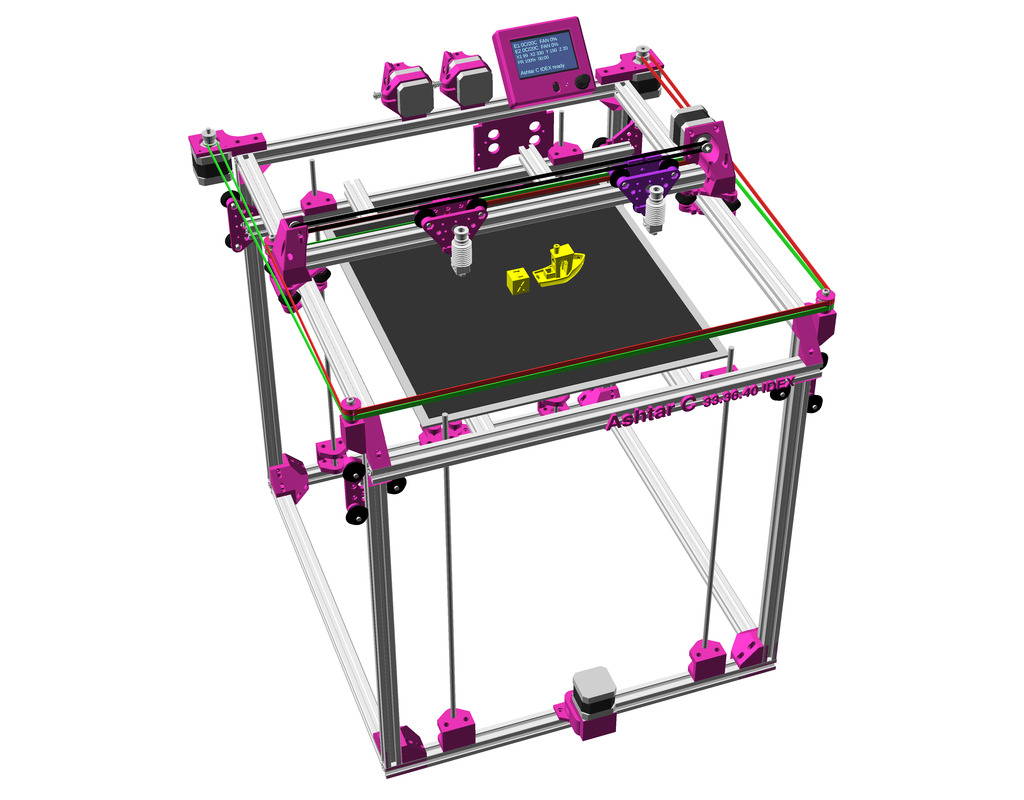
Gallery
Issues to Resolve
- Firmware supporting CoreXY IDEX:
- E1: X & Y provided through CoreXY by motors A & B
- E2: X provided by X motor, Y provided by CoreXY where X=0 remains (both motors A & B have to operate to provide X=0 while Y is moved)
- Duet RepRap firmware provides CoreXYU support, and it seems it would cover my use case here
- Marlin firmware as of 2.x does not support CoreXYU yet
- Moving the X motor – or U motor as in CoreXYU context – off the X beam and route a much longer belt and place the motor stationary like the motors A & B of CoreXY
- Ooze prevention (same issue as with Ashtar D IDEX)
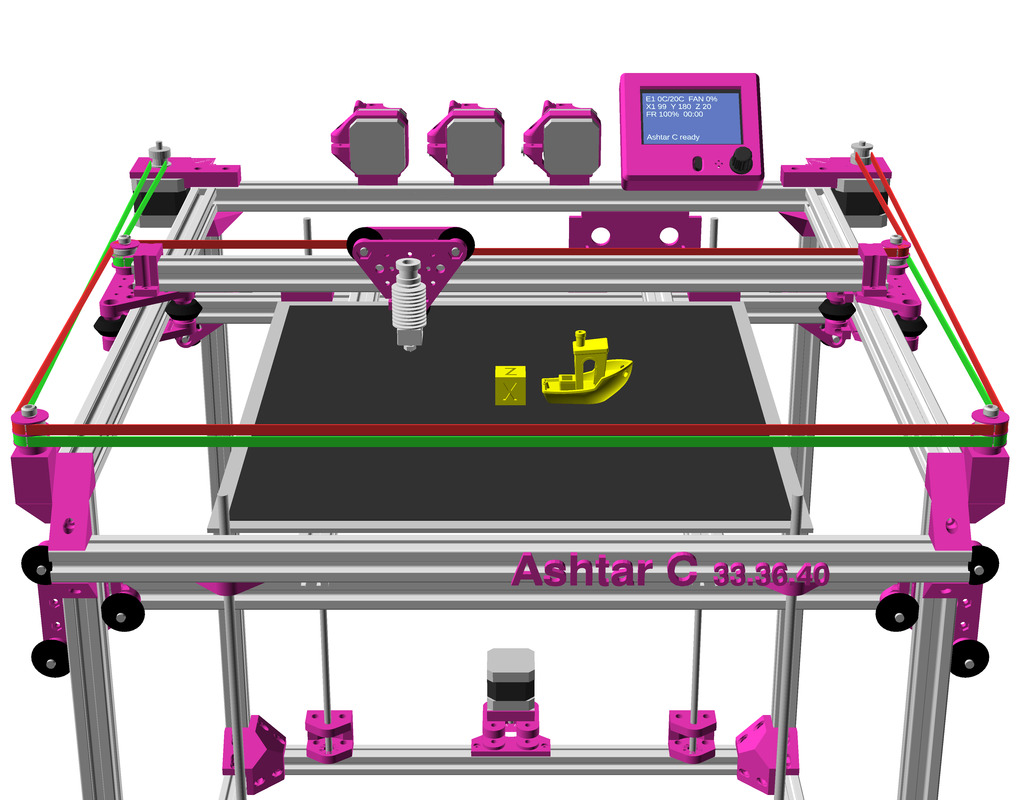
Ashtar C Ashtar C IDEX
As I progress I will update this blog-post, and summarize also the developments in the Ashtar C project page.
References
- CoreXYU: Dual Head for CoreXY, another more complex approach where 3rd motor is also stationary
That’s it.
