A brief history of “Ashtar K“, my first designed 3D printer I actually built – documented also for my own sake:
AluX: Prusa i3 Clone
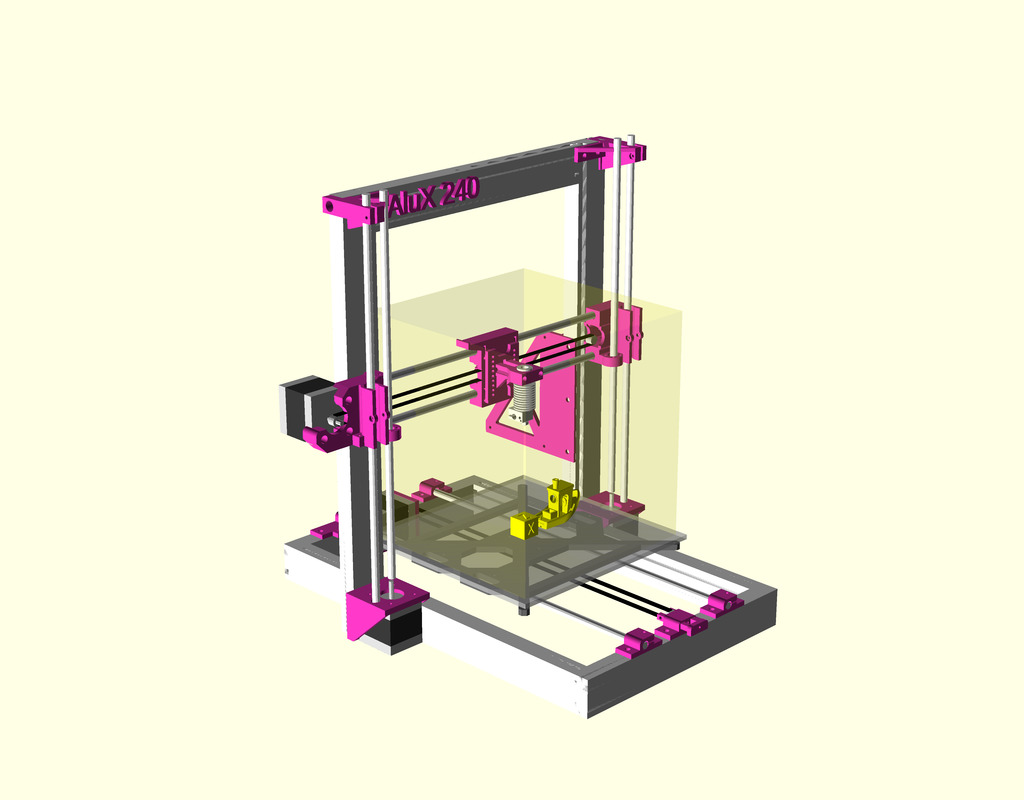
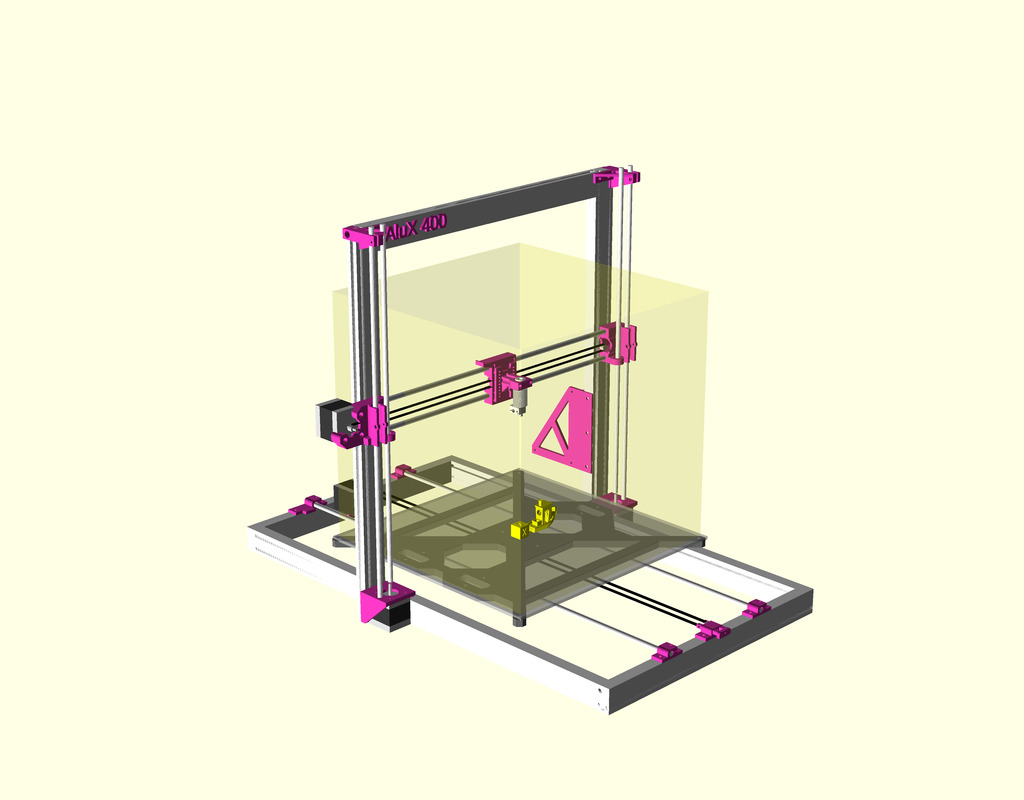
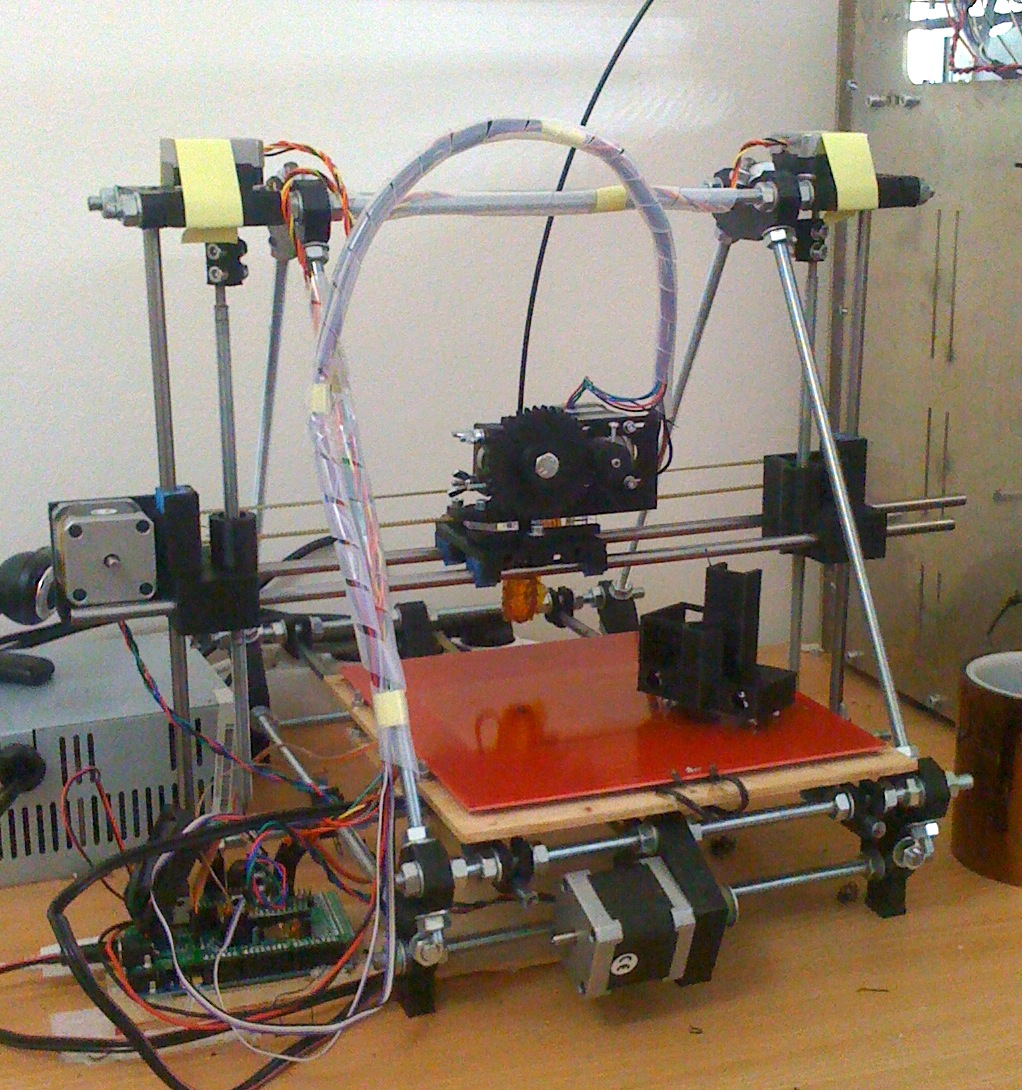
It started with AluX (abbreviation of ALU-extrusion eXtendable) early June 2018, which used CTC i3 Pro B / Prusa i3 Clone pieces as the X carriage, X motor mount and X idler all in STL format. I coded the frame parametric using 2040 alu extrusions/profiles and using smooth rods as rails:
AluX 220
AluX 400
I realized then quickly I need to design and code my own pieces, every single piece I need to control and make it parametric if it makes sense, and not rely on existing STL files, as editing meshes of the STL seemed a waste of time but rather design the piece in OpenSCAD right away and derive new variants if necessary from the geometry itself.
Ashtar X & W Series: Riding on Smooth Rods
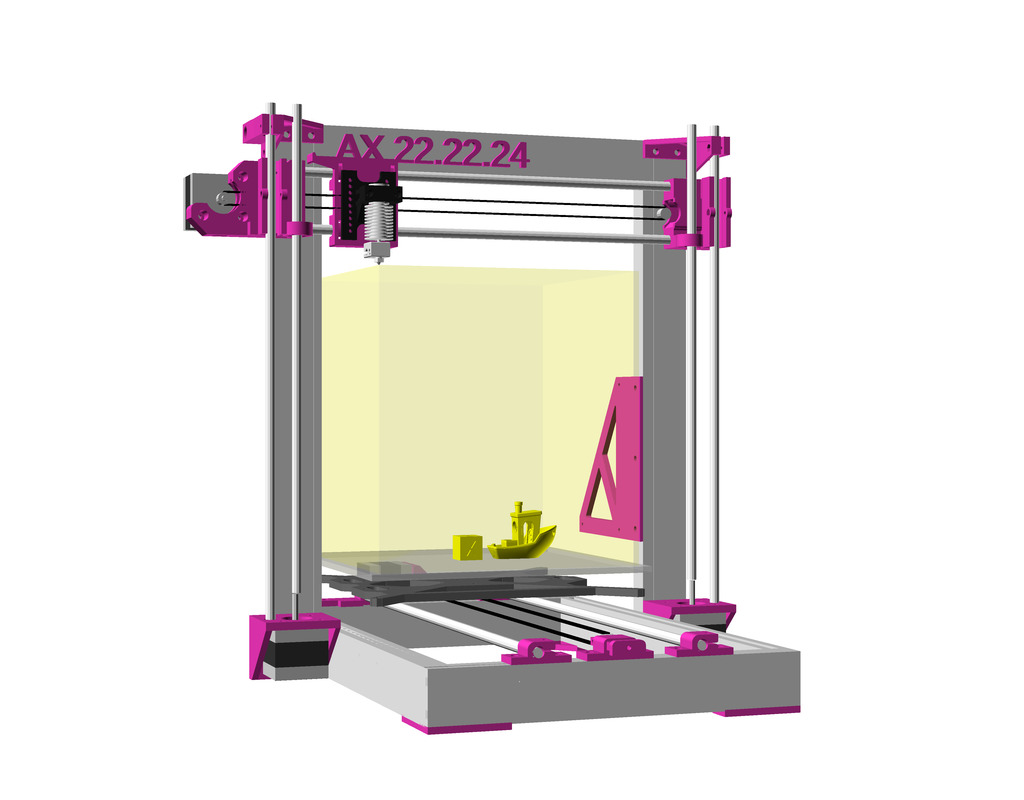
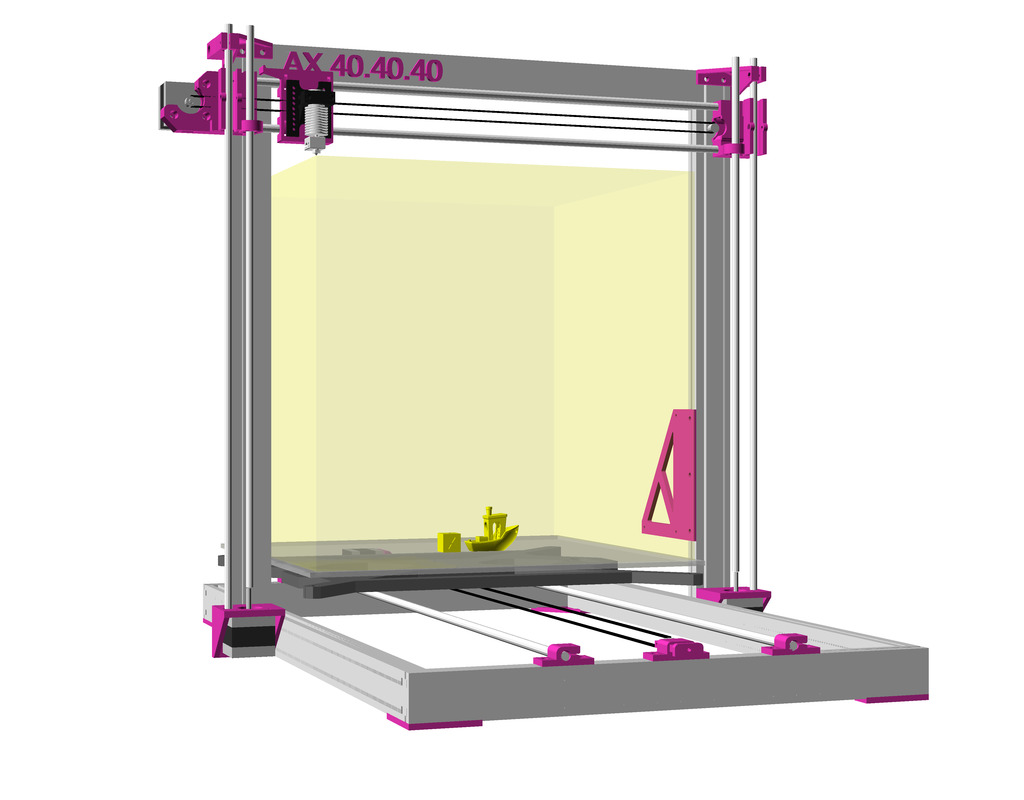
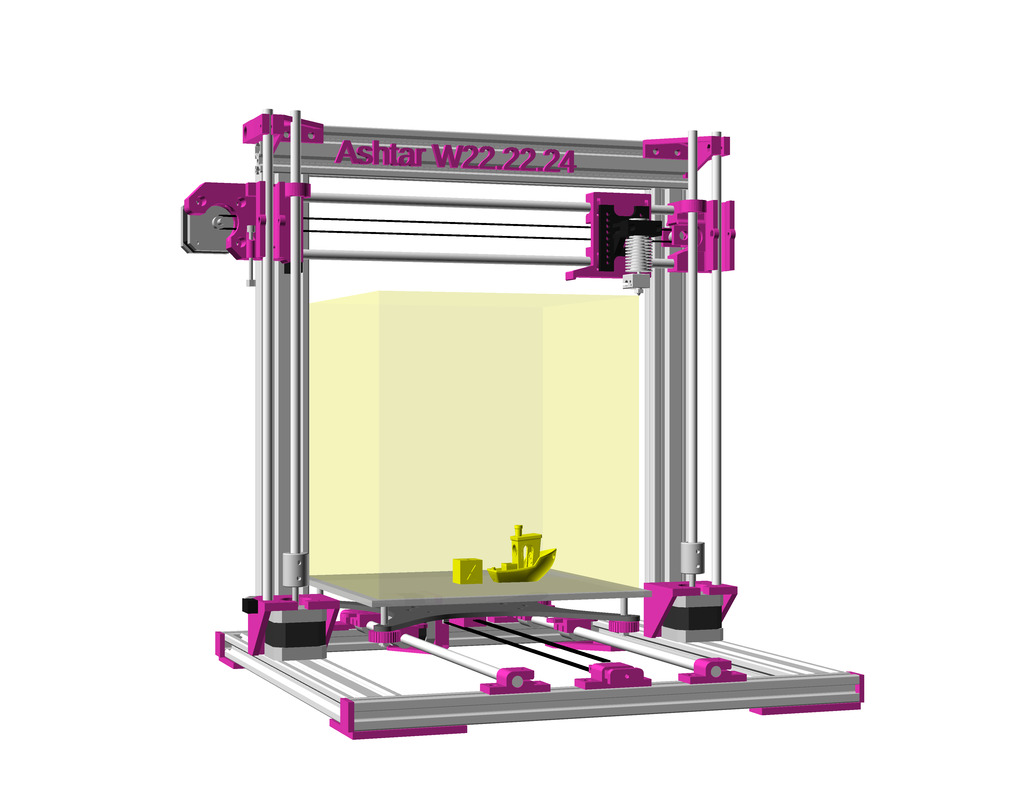
Mid June 2018, AluX became Ashtar X (abbreviated as AX), and Ashtar W were using 2040 alu extrusions but differently oriented at the base, still using smooth rods as rails:
AX 22.22.24
AX 40.40.40
Ashtar W 22.22.24
Ashtar W 40.40.40
At this point I got sufficient experience of the parametric approach and it was obvious to use the frame as rails.
Ashtar T Series: Riding Alu Profiles
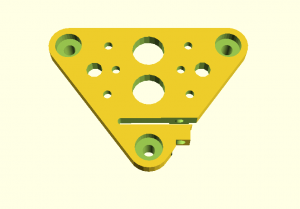
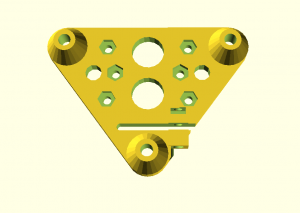
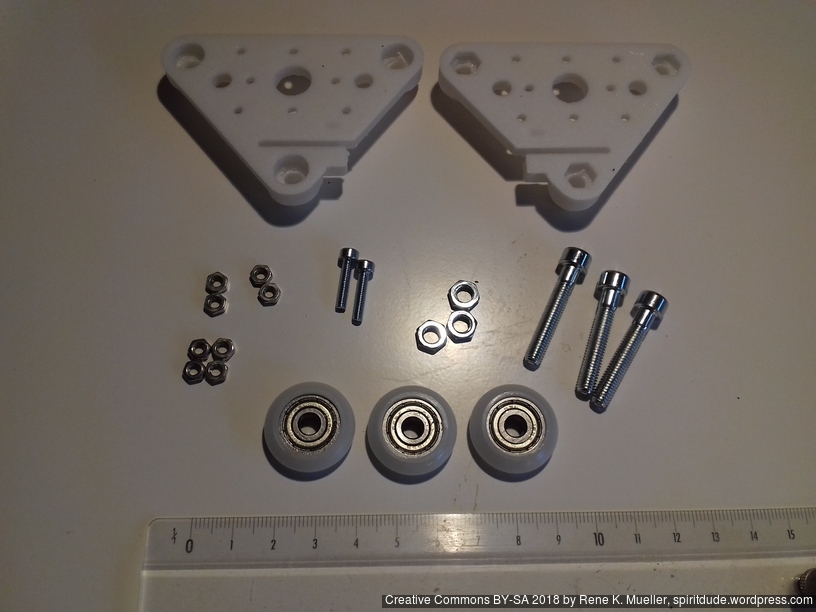
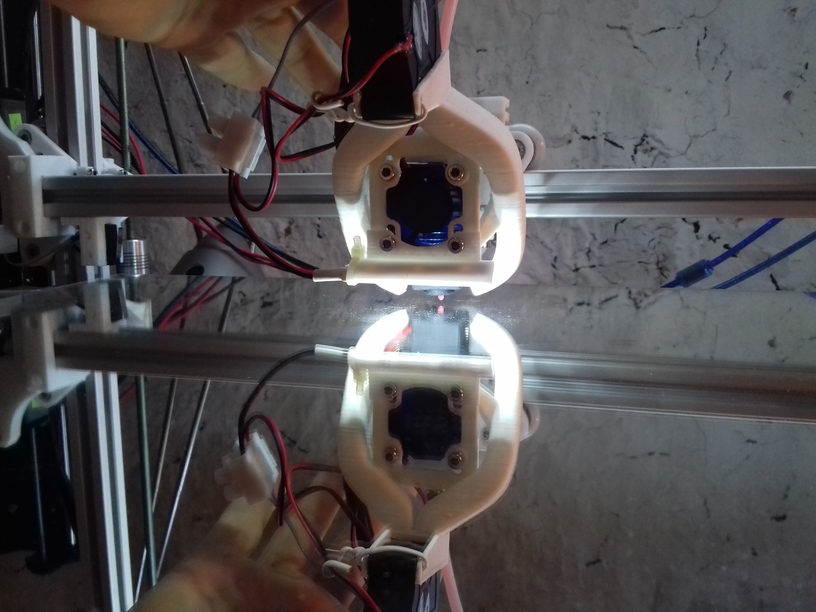
Beginning of July 2018, with the Ashtar T series I began to use the frame as rails itself, utilizing 2040 alu extrusions, it also started with the parametric V module (due its shape) composed by 2x V-plates, using 3 wheels which ride on the alu extrusion:
V plate (outer side)
V plate (inner side)
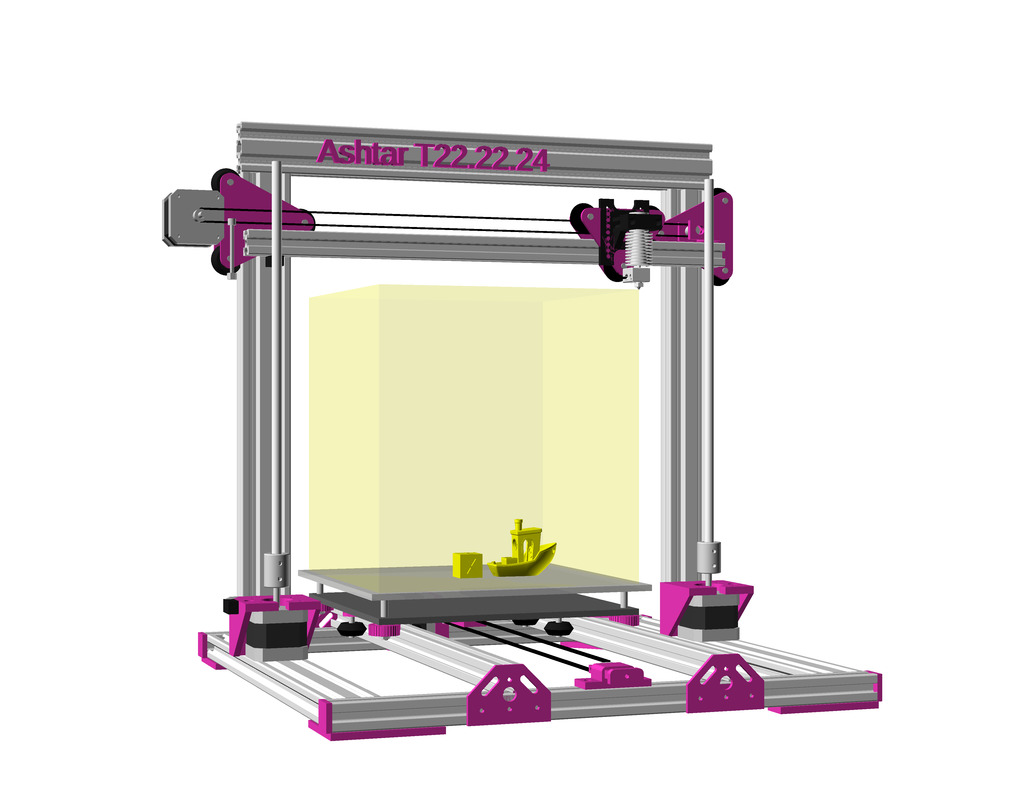
With the parametric V modules the X, Y and Z frame beams became rails as well, simplifying the overall construction compared to earlier designs:
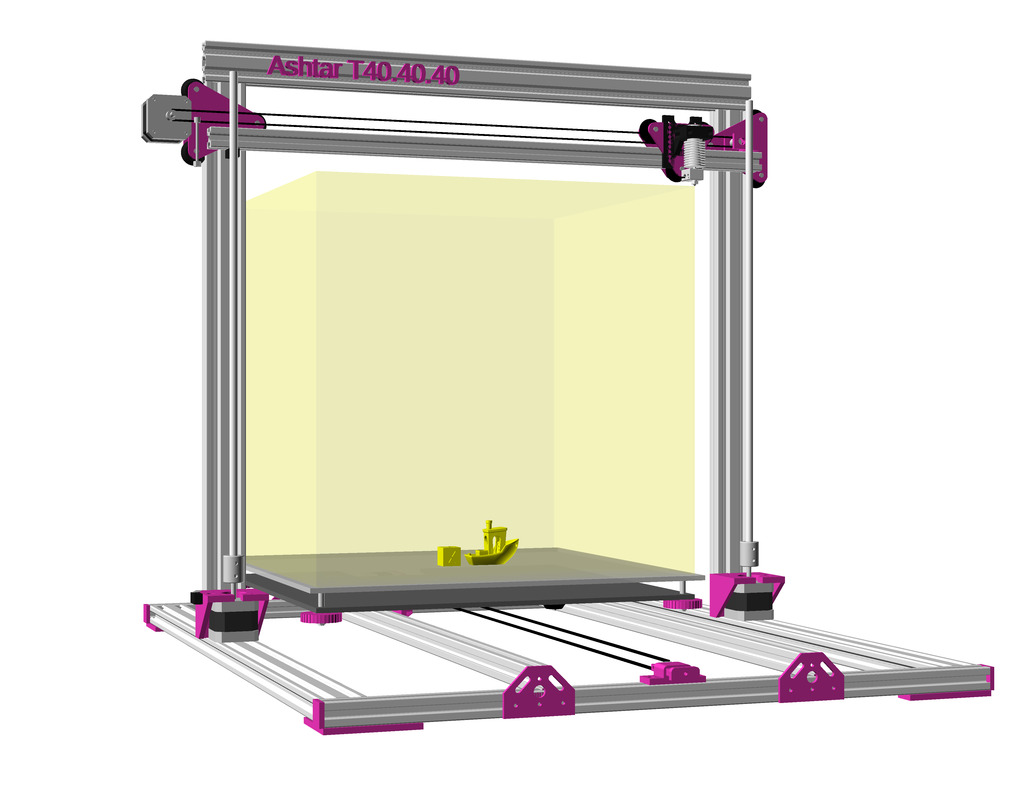
Ashtar T 22.22.24
Ashtar T 40.40.40
The dual Z motors still residing in the front for sake of accessibility, but then I realized I want them in the back and keep the front dedicated to the printhead.
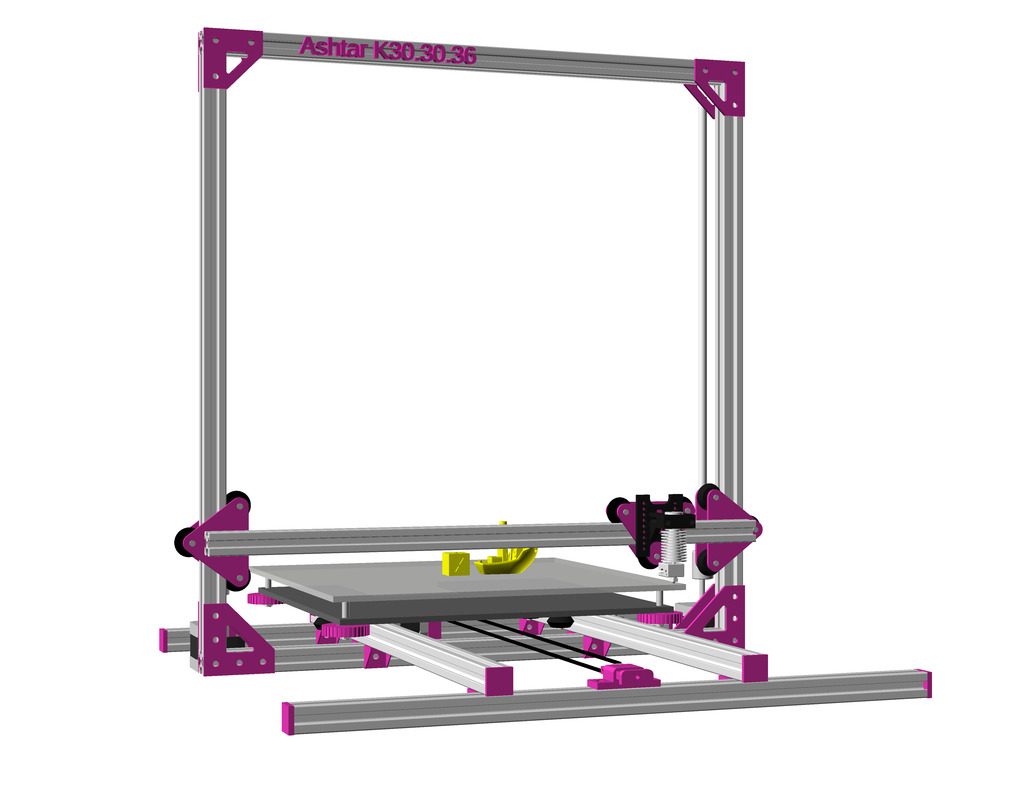
Ashtar K Series: Riding Alu Profiles, Uni-Length Beams
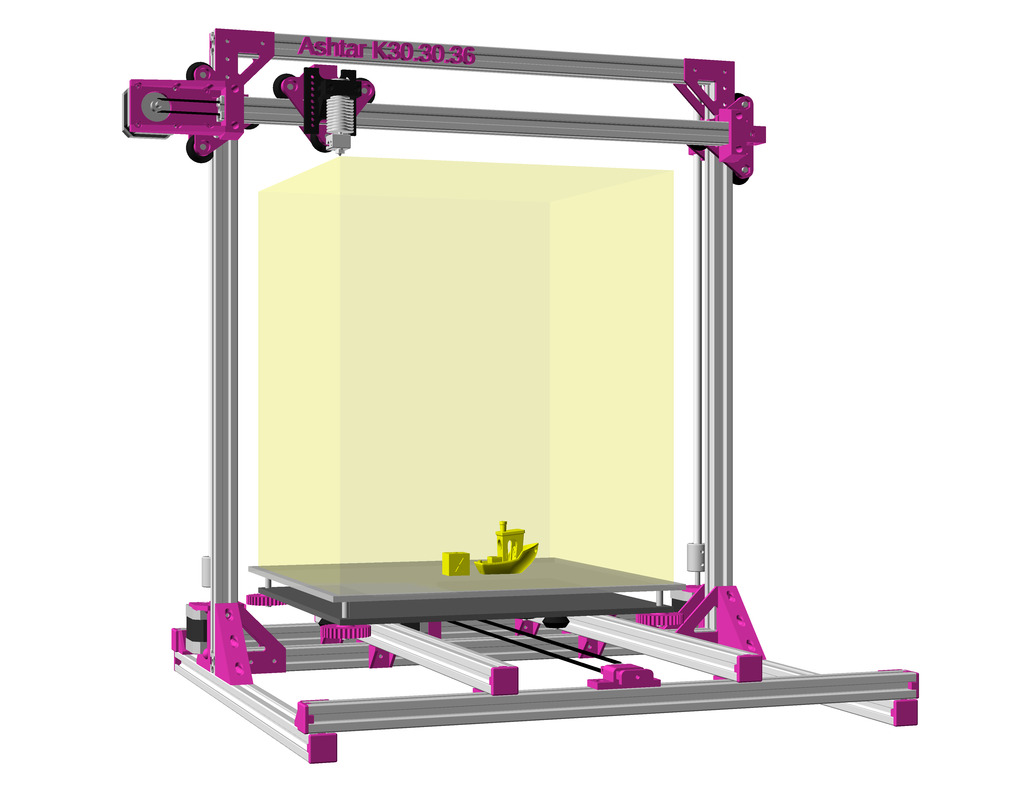
Mid of July 2018 I started the Ashtar K series, I decided to use 2020 alu profiles and focused on the single length of alu profiles, uni-length so I could reuse the beams for other future designs and since all the designs were parametric, it was easy to attain to find an optimum of single length beams and a common build-plate or build-volume:
Mid 2018: 9 beams design
Mid 2018: 9 beams design, X motor mount added
2019: 11 beams design complete, belt routing above 2020 alu profile
Late 2019: belt routing inside 2020 alu profile
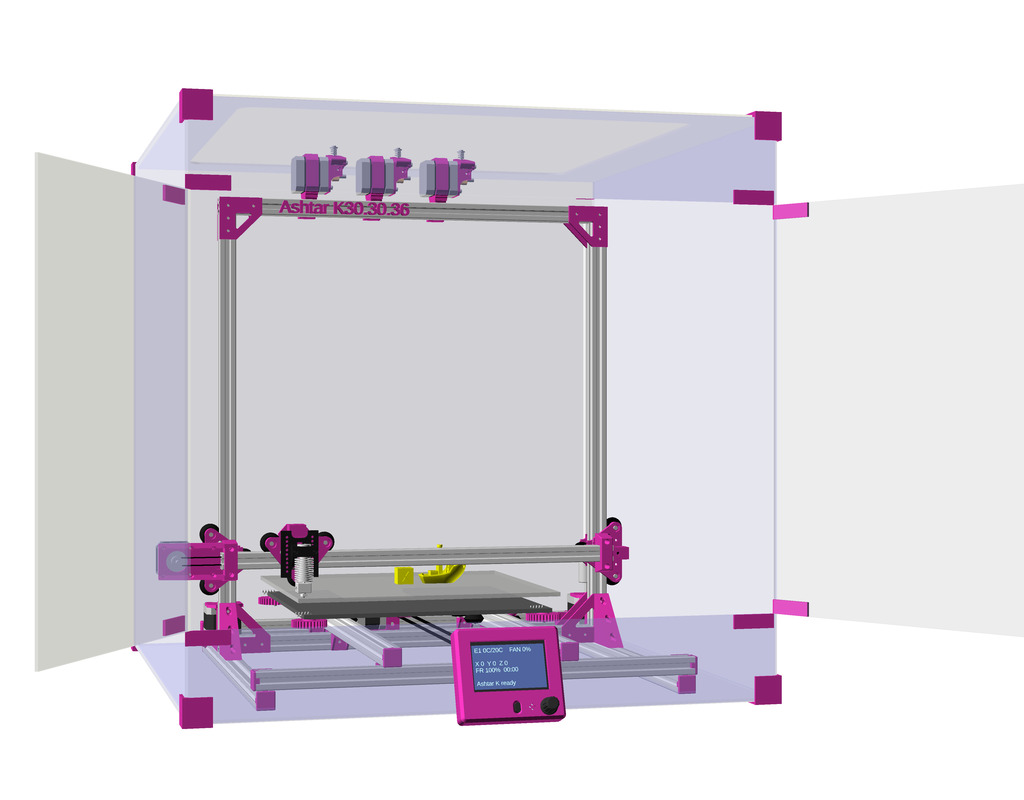
2020: multiple extruders, LCD controller
2021: adding parametric enclosure
The 9 beams design turned out too weak when I actually built the printer, so I added two beams back on left and right, and lift up the 9 beam design.
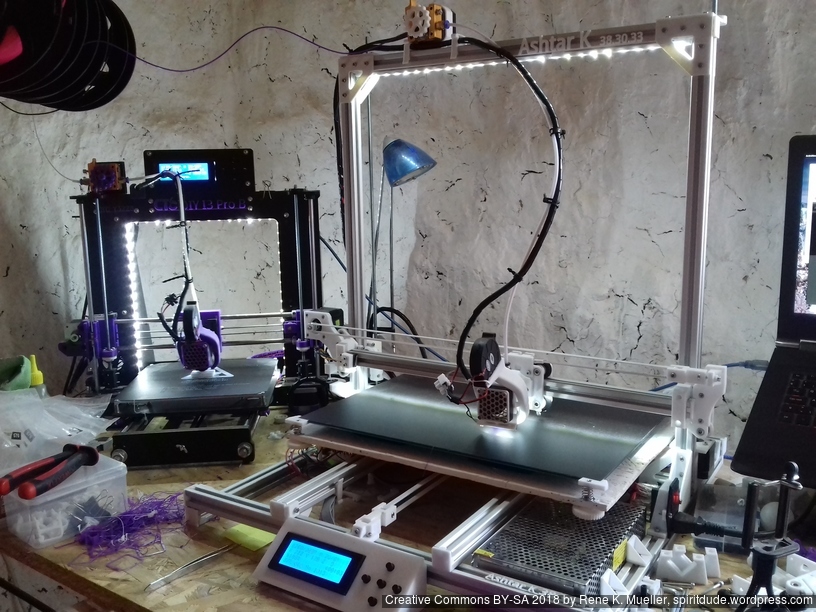
Eventually I decided to use 500mm alu 2020 profiles to achieve ~380x300x360 build volume; Ashtar K #1 used 400×300 build-plate, and Ashtar K #2 300×300 build-plate. Ashtar K #1 was functional in August 2018, and since then became my working horses together with Ashtar K #2, reliably printing.
See more at Ashtar K project page of the current state.
Next Steps
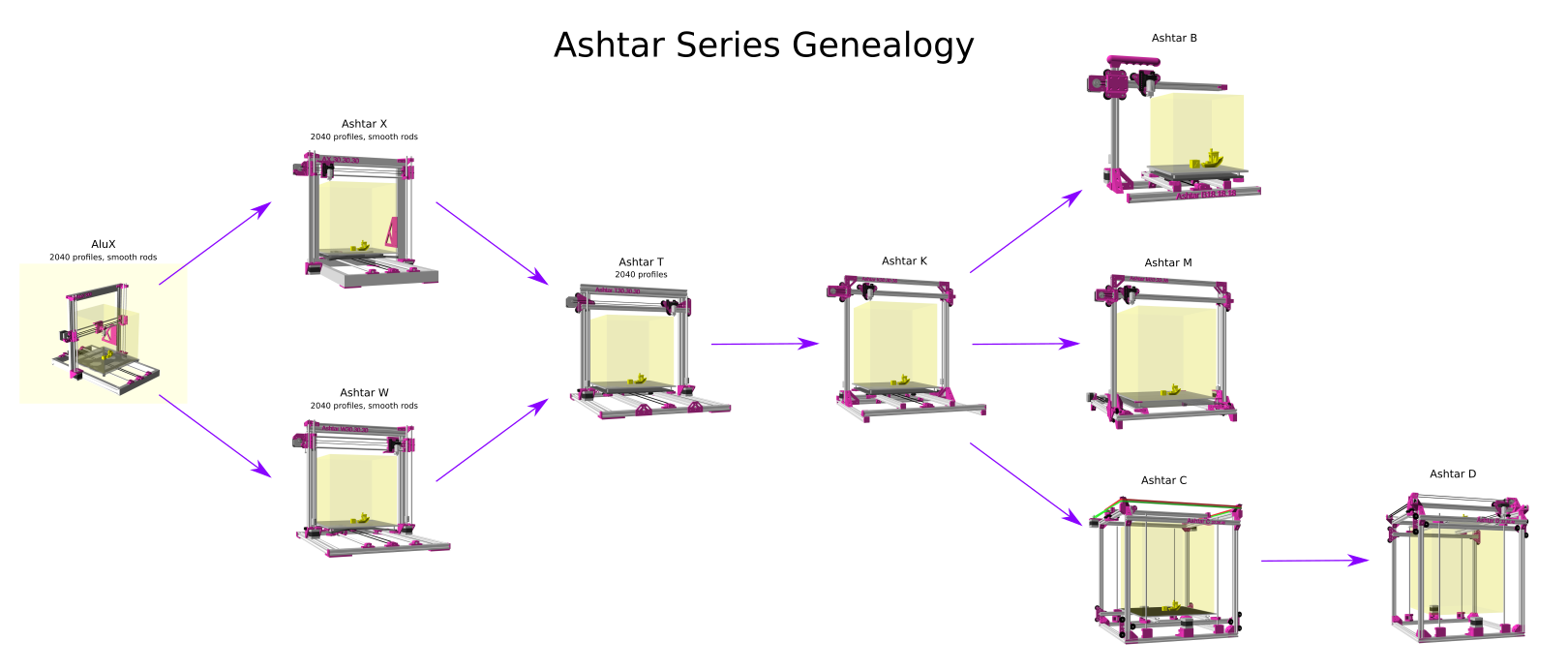
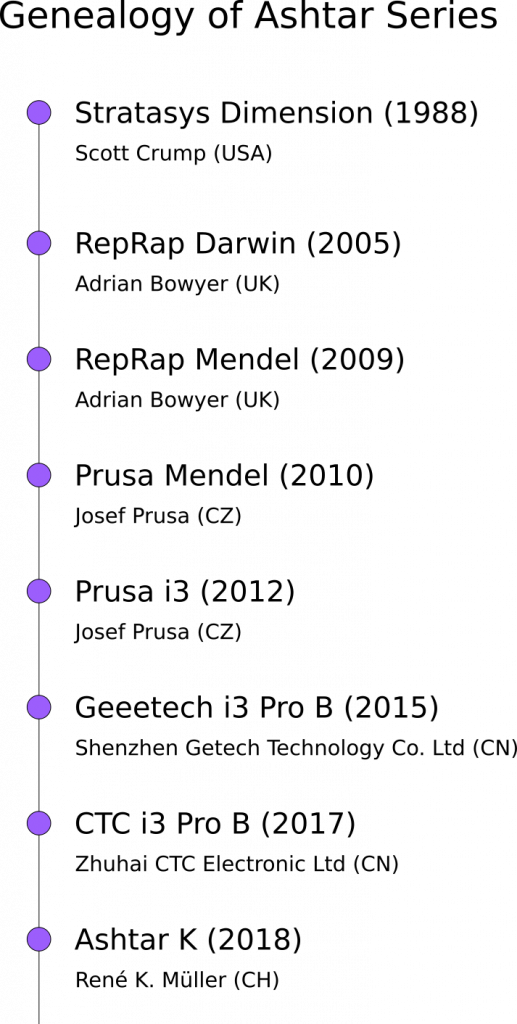
Ashtar Series Genealogy (2018-2020)
After the Ashtar K I did the Ashtar C Core XY cubic frame also with 2020 alu profiles. Late 2020 I started to design Ashtar M, a derivative of Ashtar K but with a moving gantry and static bed, and Ashtar D with Classic XY alike Ashtar C; and also a draft of a parametric enclosure as well to be adaptable to all of my 3D printer designs.
Replicating Rapid Prototyping: 3D print parts for 3D printers.
Updates:
2020/12/29: adding Ashtar K photos and “genealogy” tree or lineage.
2020/12/28: published
Introduction
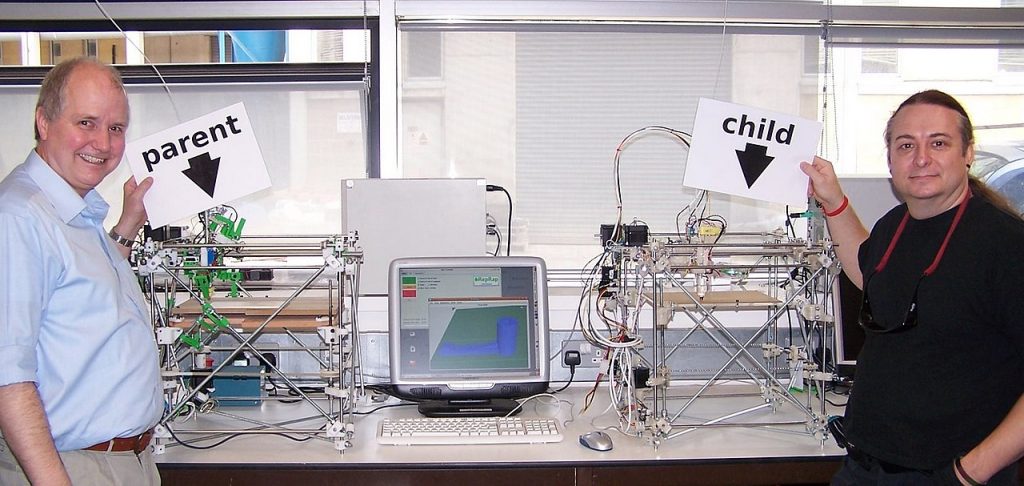
Adrian Bowyer, an academic at the University of Bath, coined the term RepRap as “RepRap is an open-source self-replicating rapid prototyping machine”. It became obvious that RepRap also meant that the plans would be Open Source, so the developers could iterate and improve the design over generations, like a biological development.
Adrian Bowyer (left) and Vik Olliver (right) showing how one 3D printer printed parts for another 3D printer
Adrian’s focus was on easy to source parts, such as threaded rods, nuts and bolts, beside the 3D printed parts which connected the non-printed parts together:
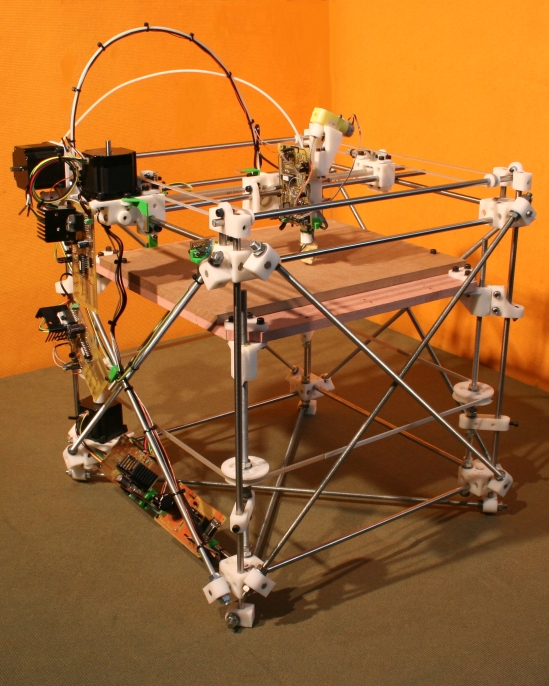
RepRap Darwin Version 1.0 (May 2007)
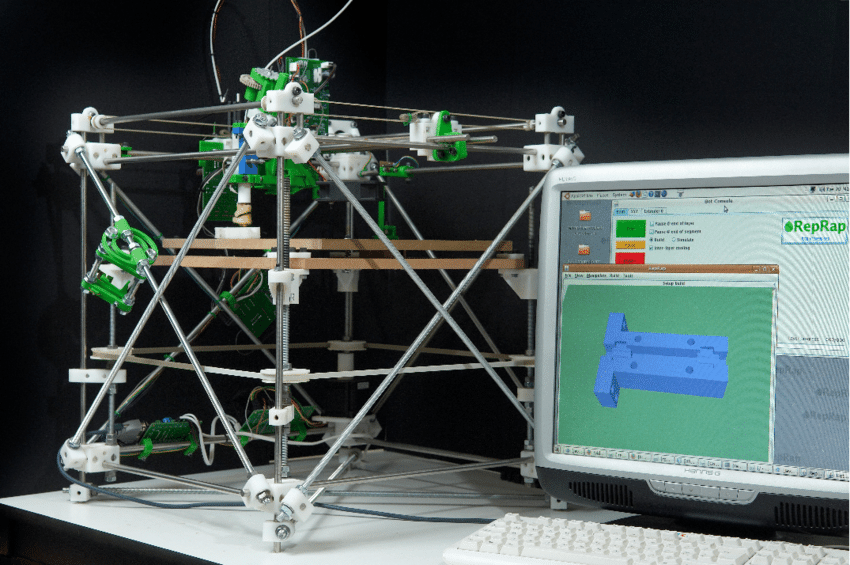
The first RepRap was named “Darwin”, a cubic frame work with printhead XY (left/right, forward/backward) and bed Z (up/down) – its printable parts were printed by a “Stratasys Dimension“ – a commercial 3D printer, see also 3D Printer History.
RepRap “Darwin” and the research behind is well documented in this paper:
The design eventually got simplified, the amount of parts of printed and non-printed (aka vitamins) were reduced:
RepRap Darwin (2007)
RepRap Mendel (2009)
RepRap Huxley (2010)
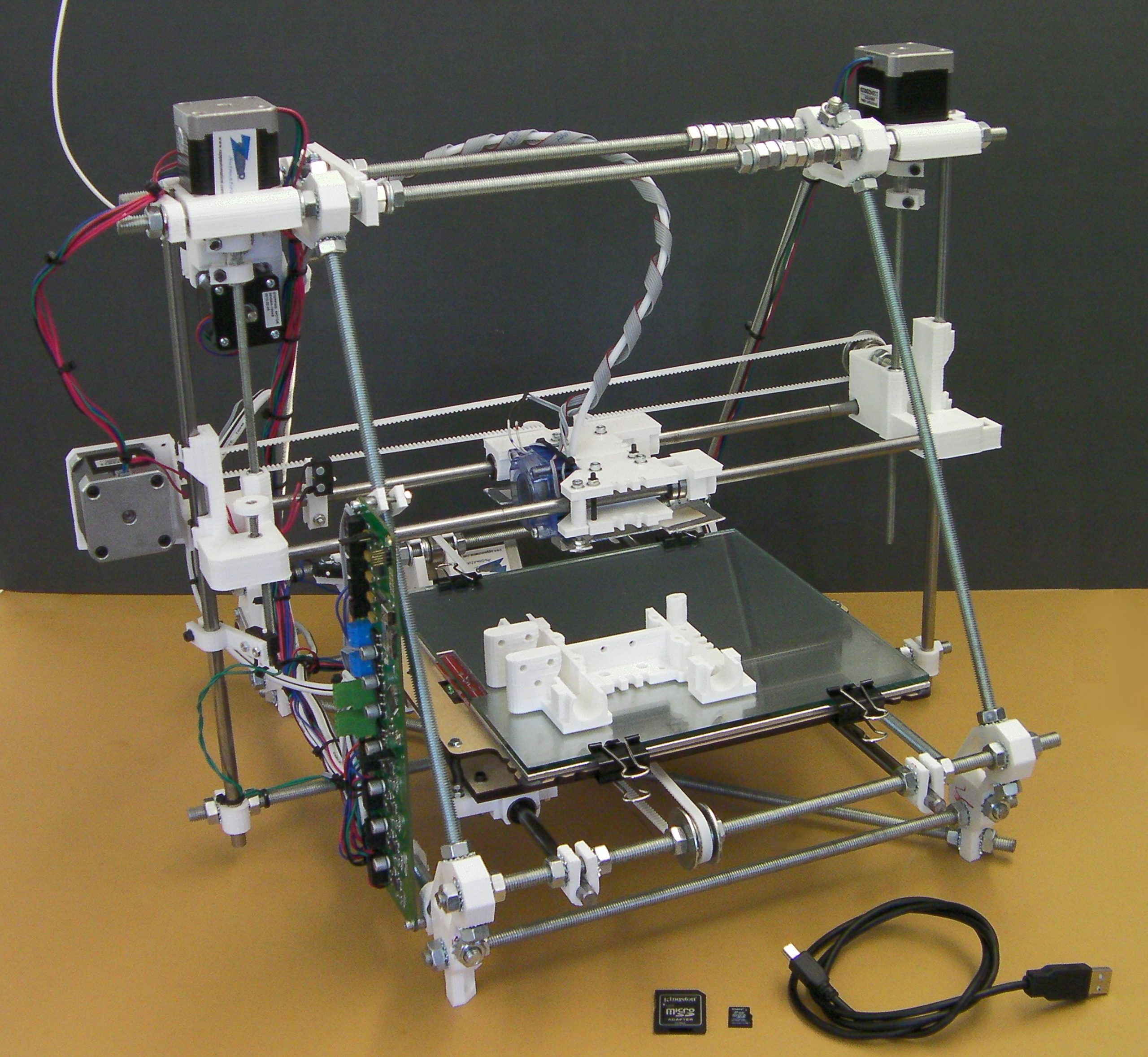
Mendel Prusa (2010)
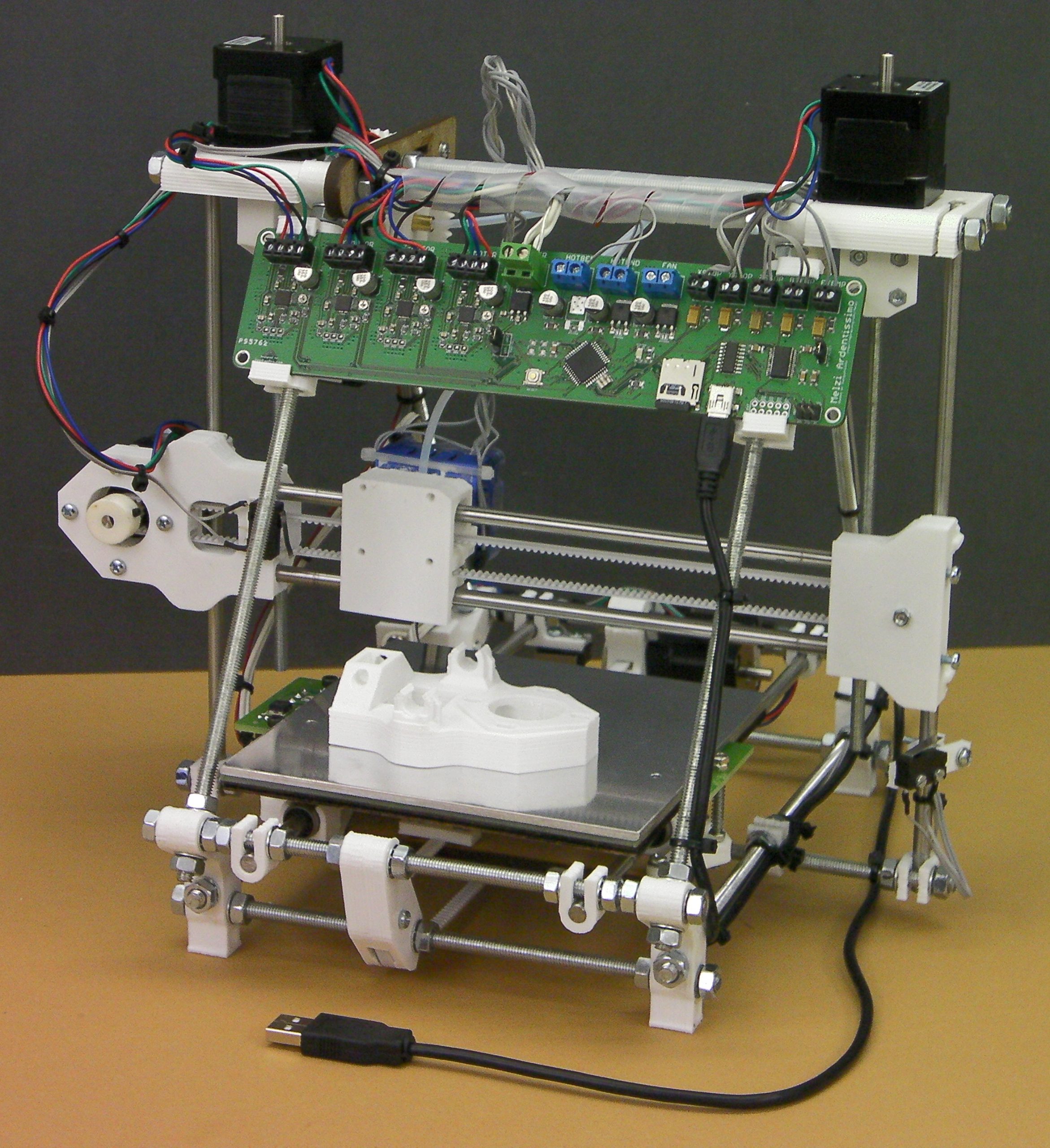
Prusa i3 (2012)
A major step was done by Josef Prusa, who joined the RepRap movement with his “Mendel Prusa” (2010), which he iterated into “(Mendel) Prusa i3” in 2012, the XZ axes were no longer build with threaded rods but a laser cut frame.
During 2010’s laser cutters began to be considered part of common Maker (maker = Do It Yourself or DIY) equipment and so it became a viable approach to build 3D printers:
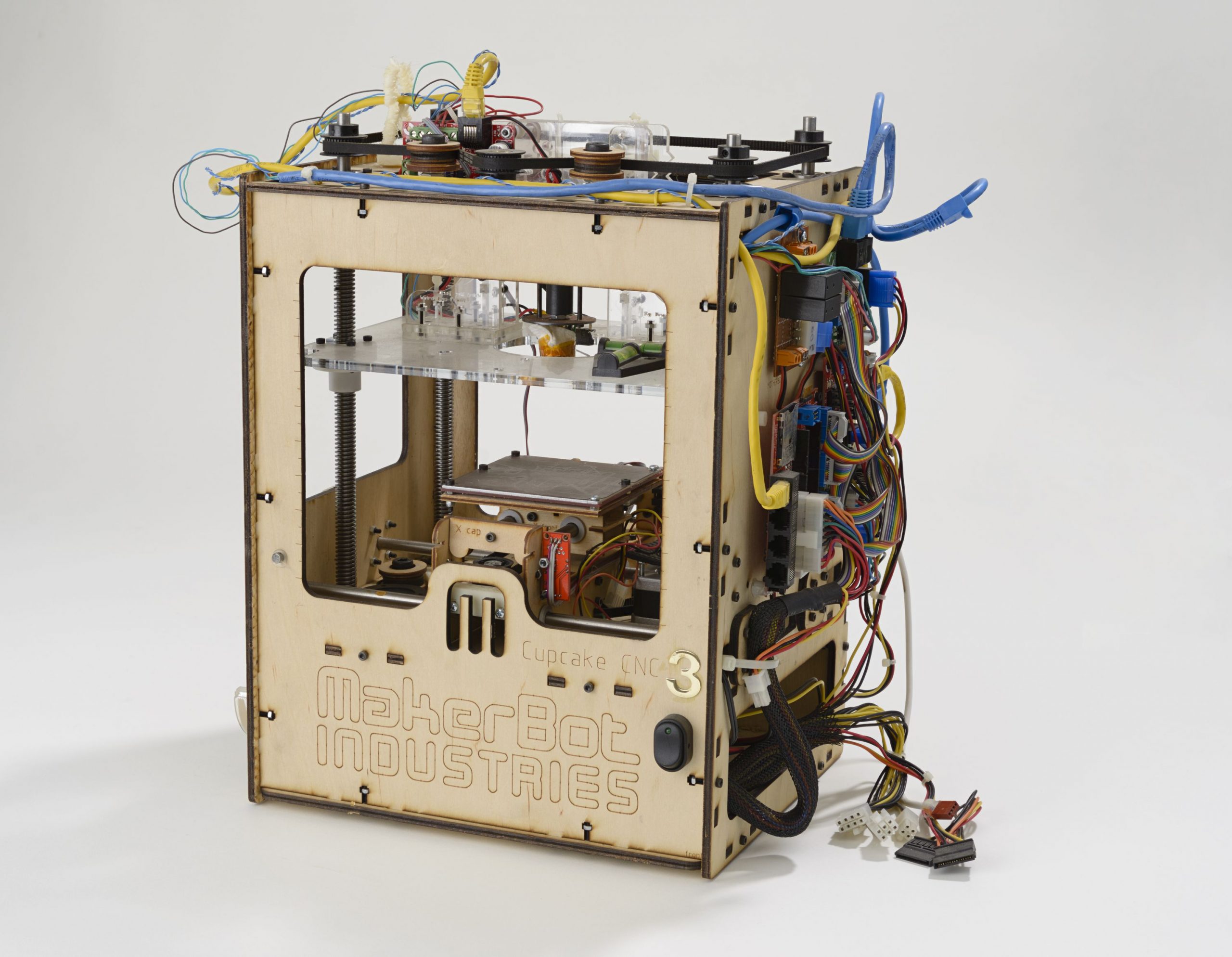
Makerbot Cupcake CNC
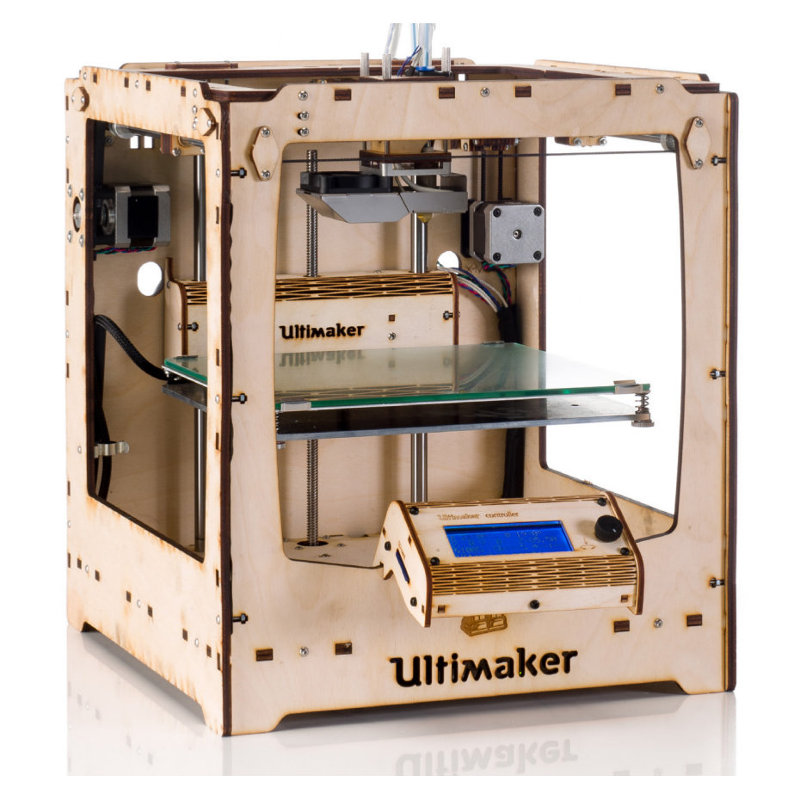
Ultimaker 1
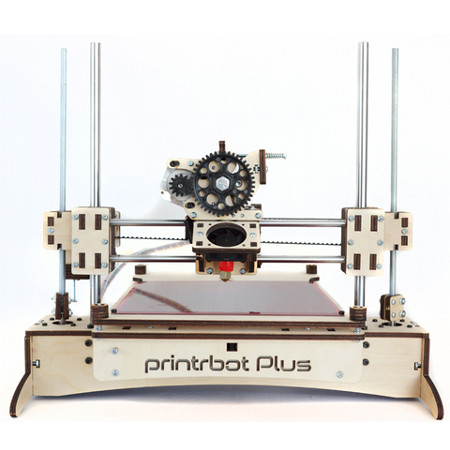
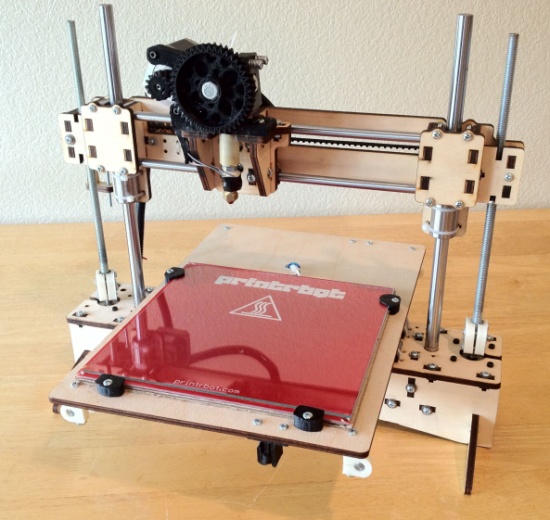
Printrbot Plus
Josef Prusa started his Prusa Research company and still follows the RepRap principle (2020) by 3D printing parts of his Prusa i3 series on a 3D printer farm:
Prusa Research 3D Printer Farm
Other companies like Makerbot, Ultimaker, and the many chinese manufacturer used other means to fulfill their needs for fast and scalable production of parts.
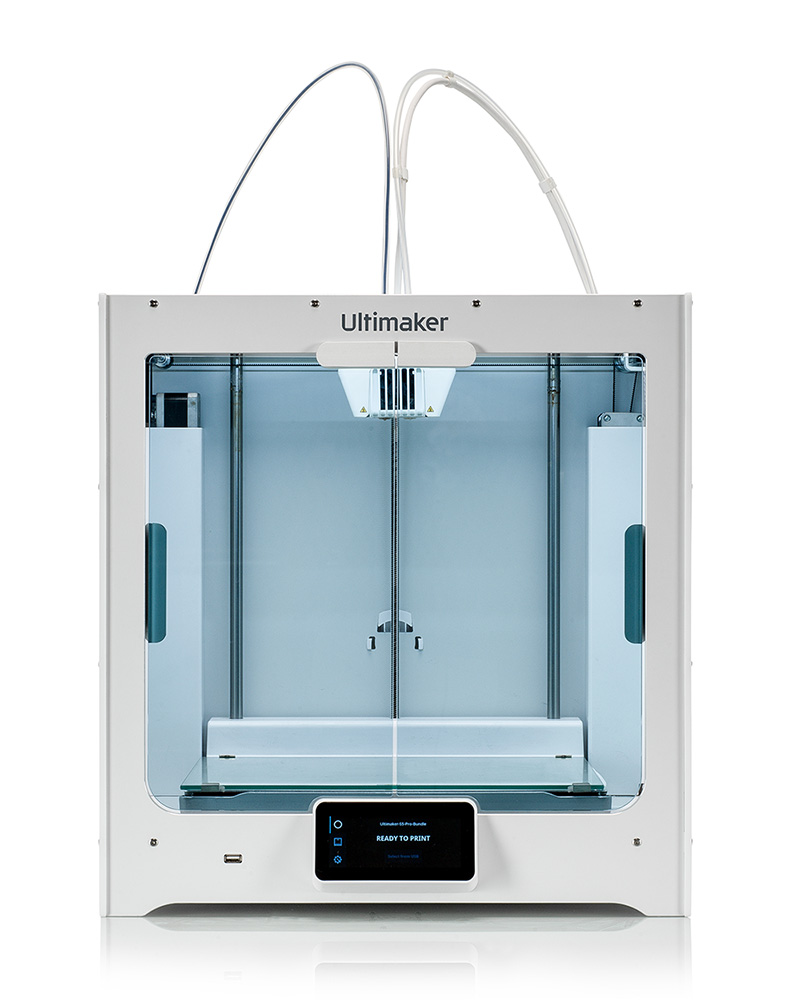
Ultimaker S5
Makerbot Replicator
Creality CR10S
And therein lies also the limitations of the RepRap, 3D printing is slow compared to injected mold or sheet bending based production, it doesn’t scale well for centralized production.
3D Printer History, an overview how it all happened, where RepRap history is part of it
In this particular interview Adrian Bowyer shares some historic perspective of the early days of RepRap, highly recommended:
Deeper Roots of RepRap
I gonna quote a larger part of the paper on RepRap – The Replicating Rapid Prototyper, to illustrate the deeper thoughts behind the idea of self-replicating machine:
(— start of quote —)
The Genesis of RepRap
Sometimes the progress and the reporting of a project can obscure the train of thought that instigated the project. Typically, that train of thought was incomplete, or sometimes downright wrong. In this section, we attempt to set down as a matter of record the ideas that led one of us (Bowyer) to invent RepRap.
Understandably, the design of most practical artificial reproducers starts with proposed solutions to many technical problems of getting a kinematic machine copy itself. However, RepRap was not instigated in that way at all. RepRap was instigated by biomimetically considering extant naturally evolved strategies for reproduction.
Biologists categorise most bacteria, archaea, protists and plants as autotrophic because they are capable of selfnourishment using inorganic materials as a source of nutrients and using photosynthesis or chemosynthesis as a source of energy. However, almost without exception, all the natural species of reproducers in the world (including those in the previous sentence) depend upon other species in some way for their survival and successful breeding – by this light they are all assisted self-reproducers. A few lithophile micro-organisms can survive alone in what are essentially mineral environments, but their numbers are vanishingly insignificant compared with those of the interdependent species. Clearly, primordial organisms must have been completely autotrophic, but now that way of life has all but disappeared because the environment in which modern organisms have evolved consists, to a first approximation, entirely of other reproducers.
Yet research into artificial reproduction often concentrates upon making the reproducer as autotrophic as possible (like the lithophiles), and researchers regard this as an important aim. Clearly this aim is important for an extraterrestrial reproducer, but why so for a terrestrial one? Why try to follow a strategy that biology has all but abandoned? An artificial reproducer designed to be interdependent with the natural reproducers that will make up its environment would be more likely to be successful.
Dependencies between species take one of the following three forms: predation, commensalism, or mutualism. Predation is well understood: lions eat antelope; antelope eat grass. Commensalism usually implies some sort of scavenging – lions and antelope are uninterested (though not ultimately disinterested) in what the grass does with their dung, their urine and their exhaled CO2. Mutualism implies a symmetry of dependencies giving benefit to both partners: the pistol shrimp digs a burrow in which it then lives with a goby fish; the shrimp is nearly blind and the fish warns it of danger.
This variety of dependencies prompts a choice in the design of an artificial reproducer: Which type of dependencies should our artificial reproducer exploit, and with which natural species? Beneficial options to people might include predation upon pests, commensal gathering of waste, or mutualism with a species whose welfare we wished to promote (such as an endangered or an agricultural one).
However, clearly the most interesting natural species with which our proposed artificial reproducer might exhibit a dependency is ourselves. This makes the choice more sharply cut: it would be foolhardy to make ourselves the prey for our artificial reproducer; having it collect our waste commensally might be useful, but the option most pleasing to our evolved senses of morality and symmetry would be to make ourselves a reproducing mutualist. In other words, we should make an artificial reproducer that would benefit from us, and we from it.
The most famous mutualism in nature, and the one that we all learn about first at school, is a reward for a service. Butler said of this in Erewhon:
Does any one say that the red clover has no reproductive system because the humble bee (and the humble bee only) must aid and abet it before it can reproduce? No one. The humble bee is a part of the reproductive system of the clover.
Moreover, he might have added, the bee is rewarded with nectar.
Mutualism between the flowers and the insects evolved about 140 mya in the late Jurassic period and is one of the most enduring phenomena in biology. For both sets of species it is an evolutionarily stable strategy corresponding to a particularly unshakable Nash equilibrium.
What service could our mutualist reproducer ask from us? Moreover, with what could it reward us? It would seem sensible to play to the differing strengths of artificial kinematic machines and people. Artificial kinematic machines can make objects accurately, repeatably and tirelessly. In contrast, they fumble at manipulative tasks that would not tax a small child. People are exquisitely dexterous. (Aristotle called the human hand, the instrument of instruments.) But – though with practice people may carve and mould beautifully – they cannot do so accurately, repeatably and tirelessly.
So our self-reproducing kinematic machine could be designed to manufacture a kit of parts for a copy of itself, and to need the assistance of people to assemble that copy (that is, it would be an assisted reproducer along the lines of NASA’s unit-reproducer). The people would be the humble bee, and the kinematic machine the clover. And what about the nectar?
If the kinematic machine were sufficiently versatile to make its own parts, then chances are that it would also be able to make many other items useful to people. When it was not reproducing itself, it would be rewarding its assistants with a supply of consumer goods. This idea of a self-reproducing machine also making useful things for people is not new. It goes back through von Neumann to Butler. But we contend that regarding this as a form of biological mutualism and deliberately seeking to achieve that in order to position both reproducers at an evolutionary Nash equilibrium for each is a novel idea.
This was the genesis of the RepRap machine. It was designed to make its own parts to be assembled by people into another RepRap. The people would be driven to do this by the fact that the machine, when not reproducing, could make them all manner of useful products. It seemed (and still seems) likely that this would lead to a mutualist relationship between people and the machine that would inherit some of the longevity and the robustness of the evolutionarily stable strategies of the insects and the flowering plants.
Finally in this section, we note that flowers do not attempt some biological equivalent of copyrighting or patenting the “intellectual property” of their genomes. Such a genome builds the flower with the sole intent† of spreading itself with the most promiscuous fecundity possible. Any genome mutation that arose that – for example – attempted to extract some payment (like the nectar) in return for a copy of itself would clearly have a lower reproductive fitness. The nectar and the information are not in any way equivalent. The nectar is a real material resource. In contrast, the immaterial genome information has been arranged purely because of its success in copying itself as freely as it can, and any impediment placed in the way of that would be to its detriment. For this reason, it was decided to follow the principles of the free software movement and to distribute every piece of information required to build RepRap under a software libre licence that requires no royalty payments whatsoever. This would allow private individuals to own the machine, and to use it freely to make copies for their friends.
The RepRap machine is intended to evolve by artificial rather than natural selection; that is, to evolve as the Labrador has evolved from the wolf, rather than as the wolf has evolved from its ancestors. It is hoped that this evolution will come about by RepRap users posting design improvements on-line that may be adopted in future designs of the machine and then in turn downloaded by old and new users. That is why the General Public Licence was chosen as the RepRap licence, as that obliges people who improve the machine to make public their improvements under a similar free licence.
(— end of quote —)
Limits of RepRap & Future
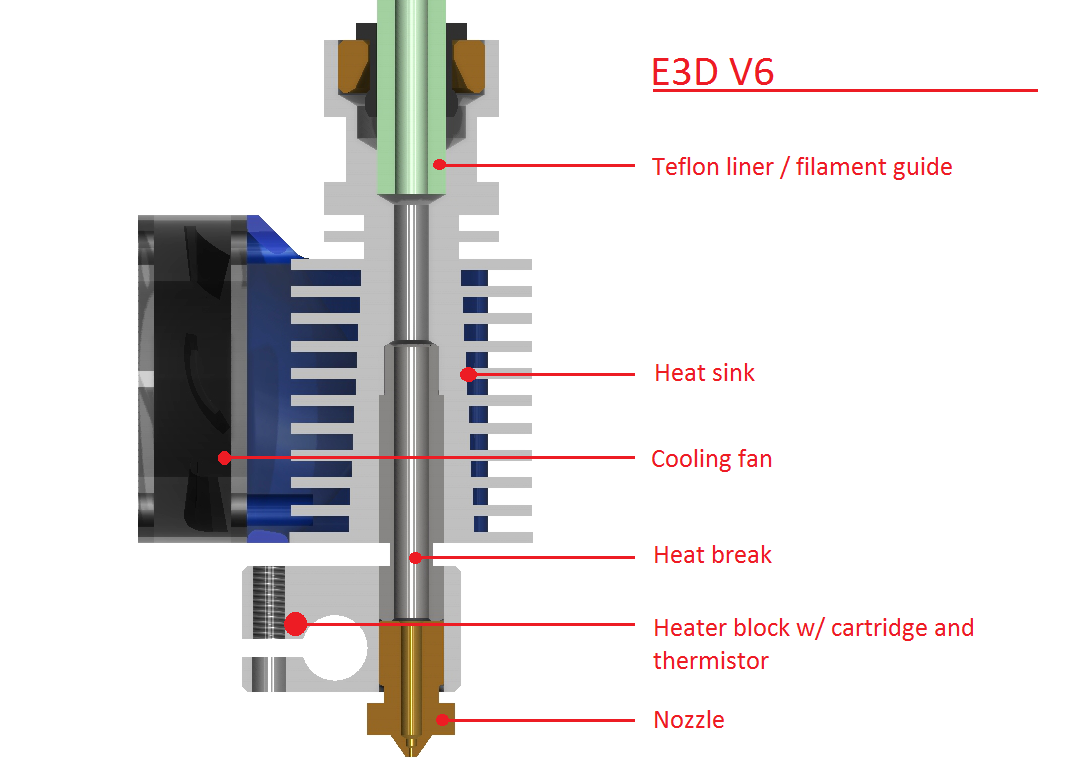
In its current form (2020) RepRap is a principle which allows a low entry in regards of complexity, cost and availability to 3D printing. Many pieces, which cannot be printed yet, need to be machined separately, e.g. with programmable CNC machines, like the hotend: heatsink, heating block, the nozzle; those pieces need to withstand the heat which is needed to melt the plastics which RepRap’s currently use to create a piece – the machine itself cannot be fully plastic, as it needs to bring the plastic in a formable or molten state to position and deposit it in space.
A future RepRap might function differently, e.g. programmable self-organizing machine which positions molecules which form a bacteria, which create nano bots and nano motors, which boot strap an assembly and create a machine again, one which can arrange molecules – there it will not be the issue of molten plastic, but the separation of what the machine is and what the in-progress machine would be; if that separation would not be regarded, such a future RepRap would blend into the 2nd machine while it would make it, and it would evolve without generating a child, it would morph into a new machine instead. Right now (2020) RepRap’s are not in danger to morph into themselves, as the pieces are plastic, and many non-printable pieces limit the completeness of self-replication.
Yet, on one occasion it happened when I was printing pieces on an Ashtar K #1 (Prusa i3) for another “Ashtar K #2” printer – quasi the child – and due some mechanical mishaps the piece was printed too close to the bed fasteners, which were printed in PLA – so they fused in that moment (failed print) – in that moment it also became clear to me, that the separation of what the machine is and what the piece it produces is, is essential. I had to break the newly printed piece apart, but it damaged the bed fastener with the hot nozzle . . . and as the morphing or fusion was so good, it no longer was clear were the bed fastener (parent) and the new piece (child) began.
So, if a RepRap comes close to create nearly 100% replicate of itself, it requires a marker and safeguards to distinguish the parent from the child in-progress to be produced, and ensure it does not morph or blend into each other.
Needless to say, self-replicating machines is reinventing life from the gross technological level downward, whereas physical life emerges from the entire stack of sub-atomic, atomic, molecular, DNA, cell, organ, body-level to planet-sized ecosystem with many species.
CTC DIY i3 Pro B (left) printed parts for Ashtar K #1 (right)
Thanks to Scott Crump, Adrian Bowyer, Vik Olliver, Josef Prusa, Shenzen Getech Technology, Zhuhai CTC Electronic Ltd and Marius Kintel (OpenSCAD) to provide the base for my 3D printing adventure . . .
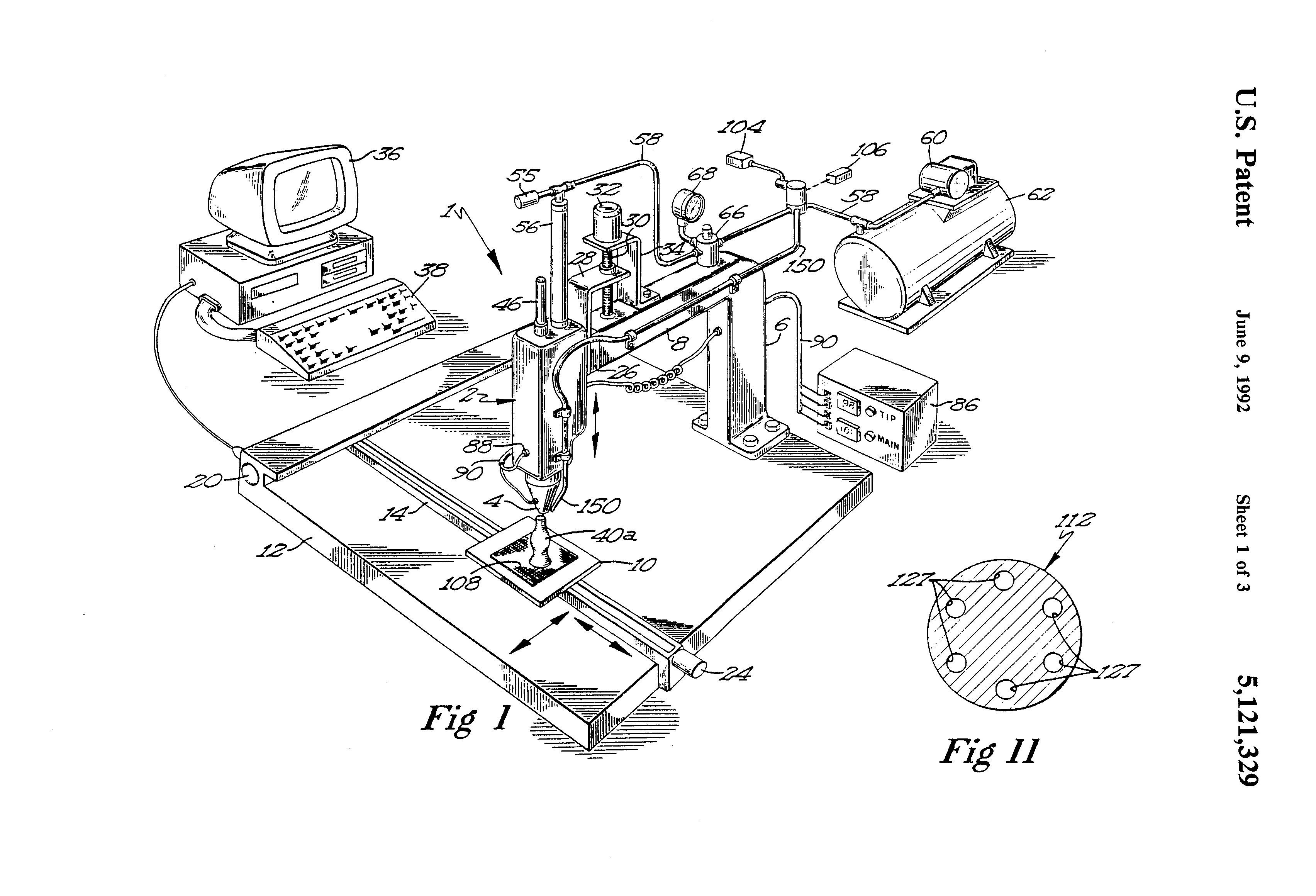
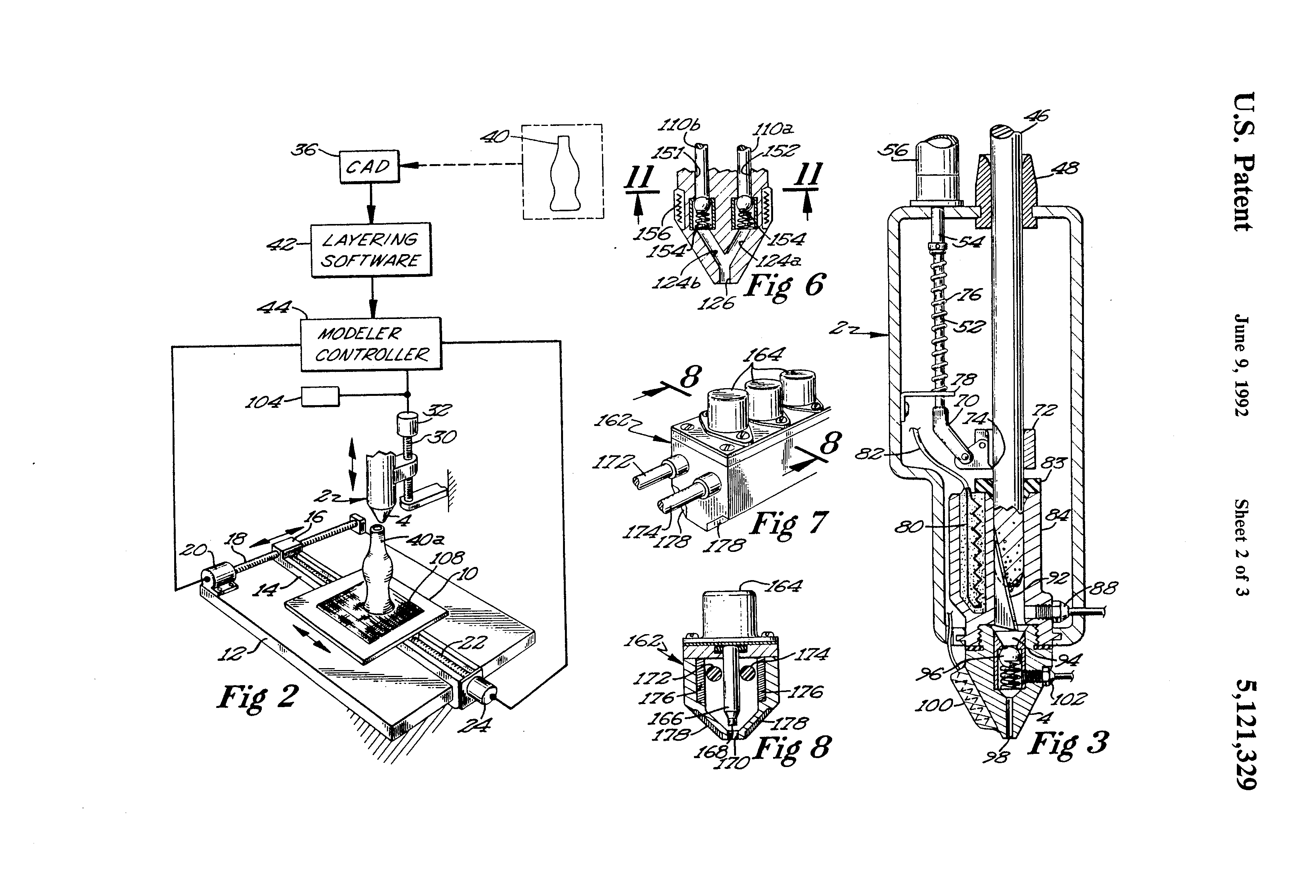
And so most approaches were secured with patents by companies like Stratasys, like the famous US #5,121,329: Apparatus and Method for Creating Three-Dimensional Objects (applied 1989, granted 1992) and others were thereby inaccessible for innovation outside of the patent holders and due the high pricing also inaccessible for users – a period of stagnation happened.
Scott Crump, US Patent #5,121,329Scott Crump, US Patent #5,121,329Scott Crump’s first Stratasys 3D Printer (1991)
Once the patents expired (~2009), and that’s truly a lesson against patents, a surge of innovation occured and the prices for 3D printers fell from 100K+ USD range below 3K USD for the same functionality and print quality.
Adrian Bowyer, a british academic, coined the term of RepRap (2005), the replicating rapid prototyping and designing 3D printers which can print parts for itself: self-replication. Hobbyists started to adapt the design and push it further, since all plans were Open Source aka Open Source Hardware, it was easy to improve and iterate the designs. Eventually the Prusa Mendel as developed by Josef Prusa and reduced overall complexity and his next iteration was most significant: Prusa i3 (2012). This third iteration became quasi standard for low cost 3D printers for the next years and his Prusa Research company surged. See also RepRap Principle and RepRap.org Blog Archive.
RepRap Darwin by Adrian Bowyer (2007)RepRap Mendel by Adrian Bowyer (2009)RepRap Huxley by Adrian Bowyer (2010)Prusa Mendel by Josef Prusa (2010)Prusa i3 by Josef Prusa (2012)
RepRap Darwin: XY head and Z bed, threaded rods based
RepRap Mendel & Huxley: XZ head and Y bed, threaded rods based
Prusa Mendel: XZ head and Y bed, threaded rods based
Prusa i3: XZ head and Y bed, laser cut XZ frame
Josef Prusa summarizing his history 2010-2019, representing part of the spirit of the RepRap movement:
2009-2013: MakerBot & Thingiverse
US-based MakerBot was at the beginning (2009) a major driving force to the Open Source 3D printing community as partially funded also by Adrian Bowyer and his wife. MakerBot also runs Thingiverse, the major repository of free 3D models and designs for 3D printing. As MakerBot struggled with sales, after receiving Venture Capital and later bought by Stratasys (2013) it left the Open Source principle at the same time Thingiverse struggled since to stay functional (2019). In 2020 Thingiverse was given some attention, it seems now taken care of better.
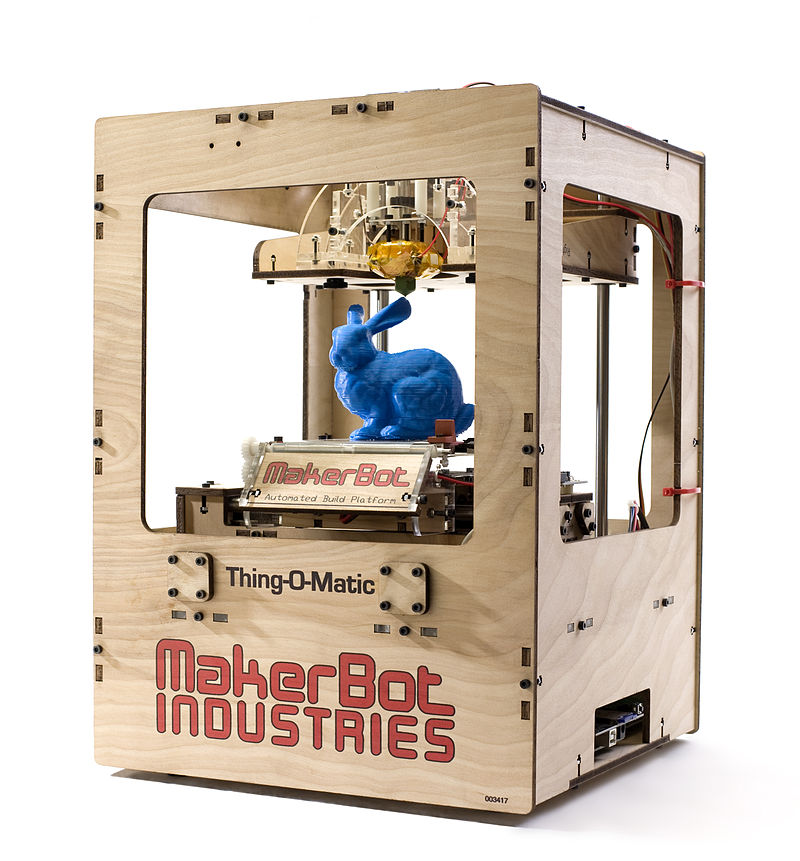
Thing-o-Matic: Z head, XY bed, laser cut wood frame
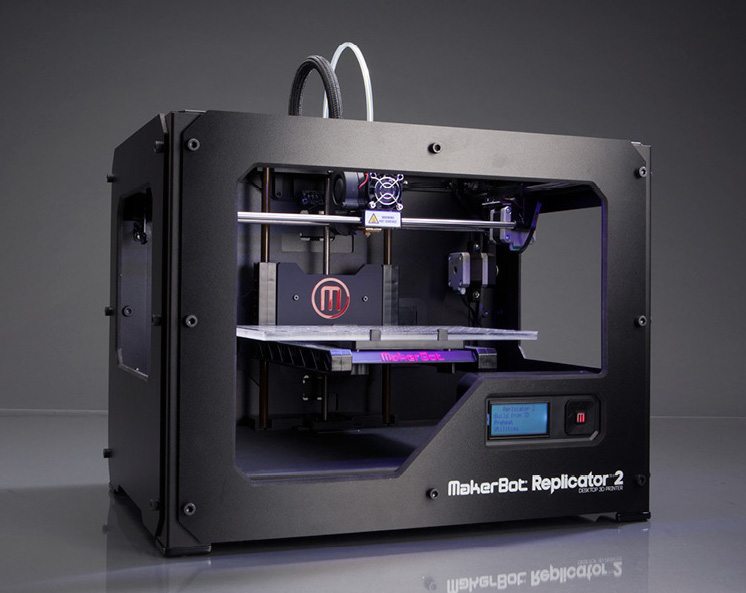
Replicator 2: XY head, Z bed, metal frame
2011-2016: Kickstarter Hype
With the expiration of patents held by Stratasys and other companies (2009-), the surge for Kickstarter-based 3D printers began, sub 1000 USD printers became widely available, but also many failures and plain scams happened. Printrbot started as Kickstarter and thrived for a few years as US-based 3D printer company, also Snapmaker and FORM 1 by Formlabs made a successful debut, while sub 100 USD 3D printer like MakiBox, metal Eventorbot or slick Buccaneerfailed at different stages.
In 2016-2018 chinese manufacturers (Geeetech, Creality, Anycubic, FLSUN, TEVO, CTC etc.) started to develop Prusa i3-like machines and the companies started to copy each others parts and improvements at a rapid pace. As a result, many small US companies, like Printrbot, which contributed significantly to the Open Source movement, closed doors for good (2018).
A big game changer was Ender 3 as manufactured by Creality, priced at USD 150-200 incl. shipment, providing excellent printing quality, at a price which was hard to compete by anyone else. Notable was, Creality open sourced Ender 3 entirely, as the Open Source community built up pressure to chinese manufacturers which spit out each month a new Prusa i3 derivative (e.g. different build volumes, slight improvements of extruders etc) back in 2018/2019.
Anet A6 (2016)CR10 (2017)Anycubic i3 Mega (2017)Ender 3 (2018)
As a side note, the chinese manufactured 3D printer broke the RepRap principle and used other means to produce their parts, while Prusa Research has a 3D printer farm to manufacture their parts.
Prusa Research 3D printer farm (2018)
Western Innovation & Chinese Manufacturing
Mosquito hotend by Slice Engineering (2018) Closed Source, Patent Pending
It became obvious the past years (2010-2019), that true innovation still remained in the west, Czech-based Prusa Research, Denmark-based RepRap.me with Diamond Hotend (3-in-1 and 5-in-1), or UK-based E3D or US-based Slice Engineering with their hotends and extruder technology, and the chinese manufacturer which cloned or copied the Closed- and Open-Source designs within weeks and sold at fraction of the price as by the original inventors. Often chinese manufactures tried to simplify hotend designs and compromised significant features – to copy a design didn’t mean the design was understood.
As pointed out, Creality, one of the big chinese 3D printer manufacturer, started to adapt and join the Open Source Hardware movement, with the release of the Ender 3 source files and get properly certified – time will tell – as of end of 2019 – if they stay true to their commitment, and whether other chinese 3D printer manufacturer follow and become also actual innovators.
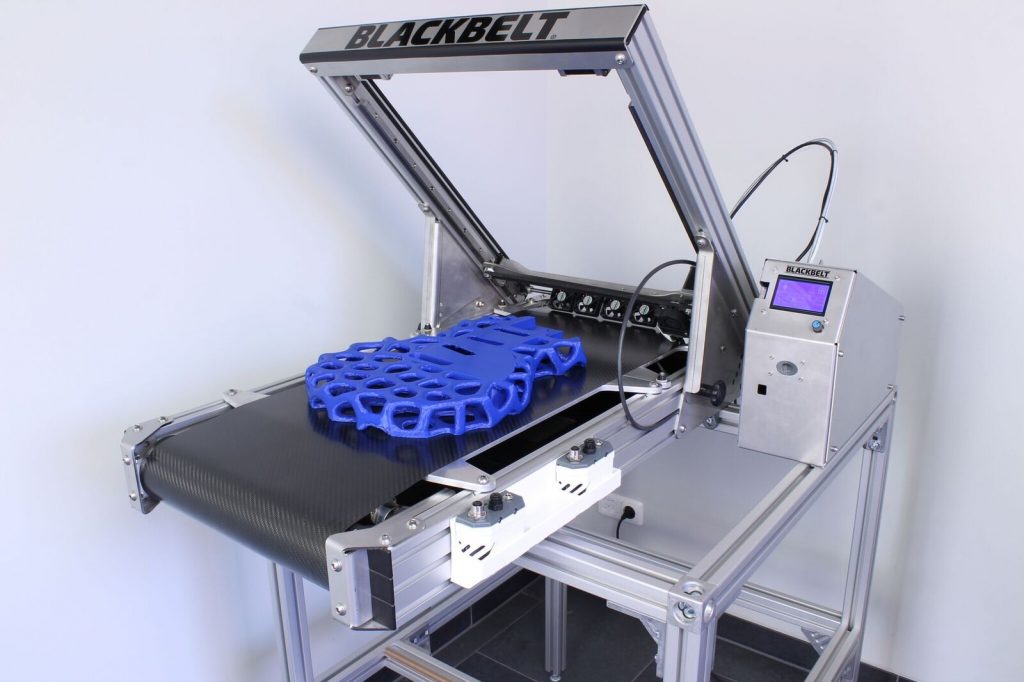
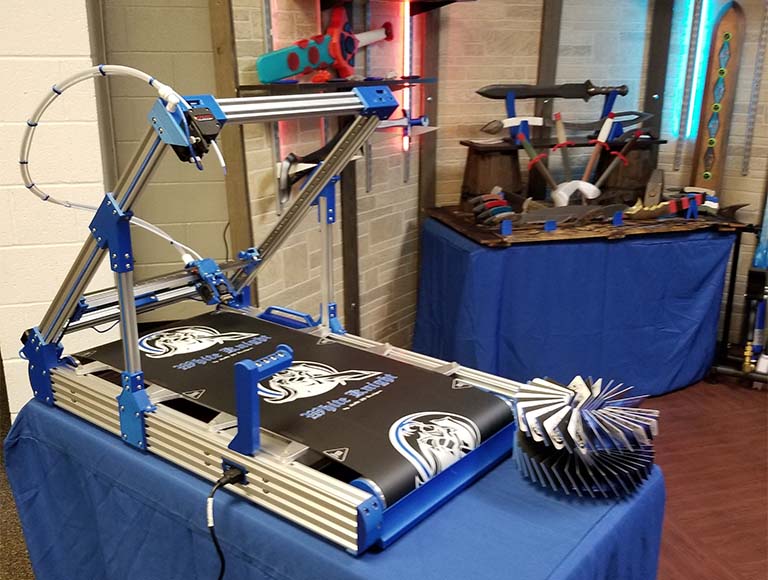
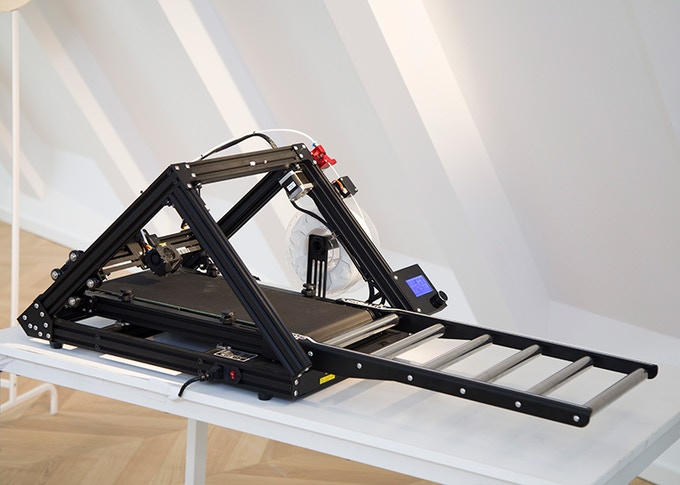
In late 2020 Creality announced a belt-based printer named CR-30 aka 3DPrintMill as a result of collaboration with Naomi Wu and acknowledging all the previous research of developers like Bill Steele and Karl Brown (White Knight Belt) the printer is based on – and renewed their commitment to Open Source the CR-30 – a nice development.
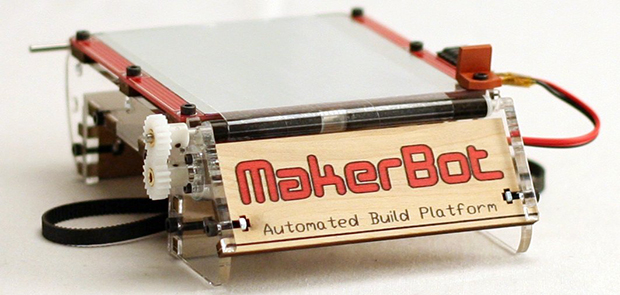
Makerbot Automated Build Plate (ABP) (2010)Bill Steele Tilted Belt Printer (2016)Blackbelt (2017)White Knight Belt 3D printer at MRRF 2019CR-30 aka 3DPrintMill by Naomi Wu (2020)
2021: Voron, Prusa XL, E3D Revo
A loosely organized Maker group developed various 3D printers under the brand Voron Design which gained momentum in the Maker community:
CoreXY (Voron 0.x, 2.x, Trident) or CoreXZ (Voron Switchwire)
sturdy well engineered frame design
tuned toward reliable and fast printing
properly documented (CAD models, bill of materials)
fully open source
no commercial frontend (no single store to buy assembled Vorons, only kits)
Voron printers became well-known in 2021 and widely adapted among people who wanted to build their own printers.
Voron 0.1Voron 2.4
Various skillful Makers tuned the printer design toward very fast printing, high motion speeds and acceleration, to achieve 3D Benchy prints below 10mins at acceptable quality aka “Speed Benchy”.
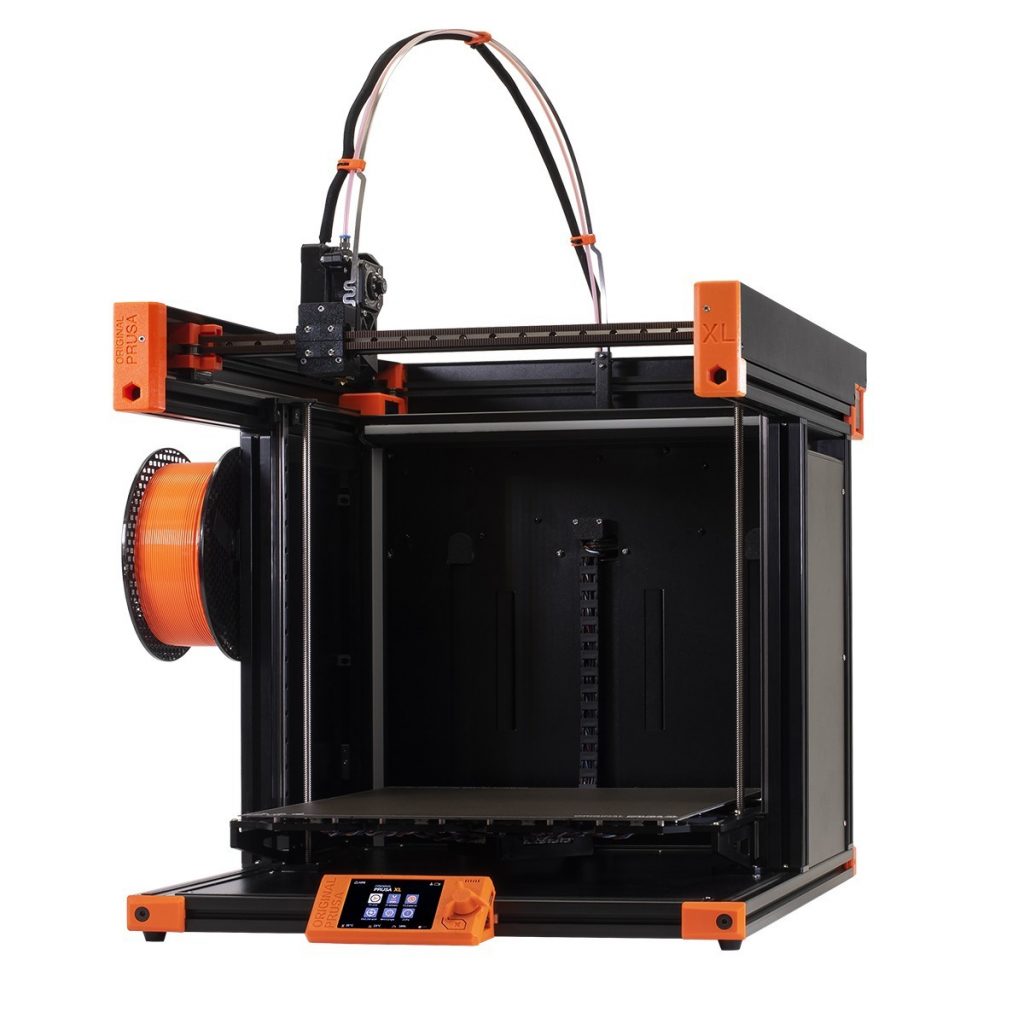
Prusa XL (CoreXY)
At Formnext 2021 (November 2021) Prusa Research announced the Prusa XL, a CoreXY cubic frame 3D printer, with interesting features:
ability to sense blocked nozzle, indirectly by measuring bending of print head with a load cell
autoleveling done mechanically via same load cell
multiple heating zones in the build plate (only heat where part resides)
multi-material with optional tool changer
foldable curtain to maintain more regulated air temperature within the printer
build-volume 360x360x360mm
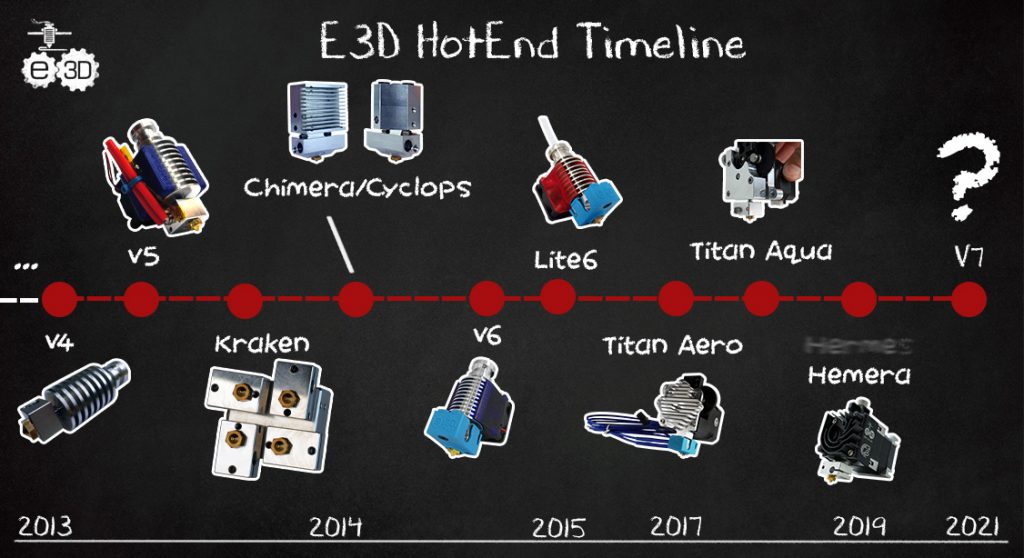
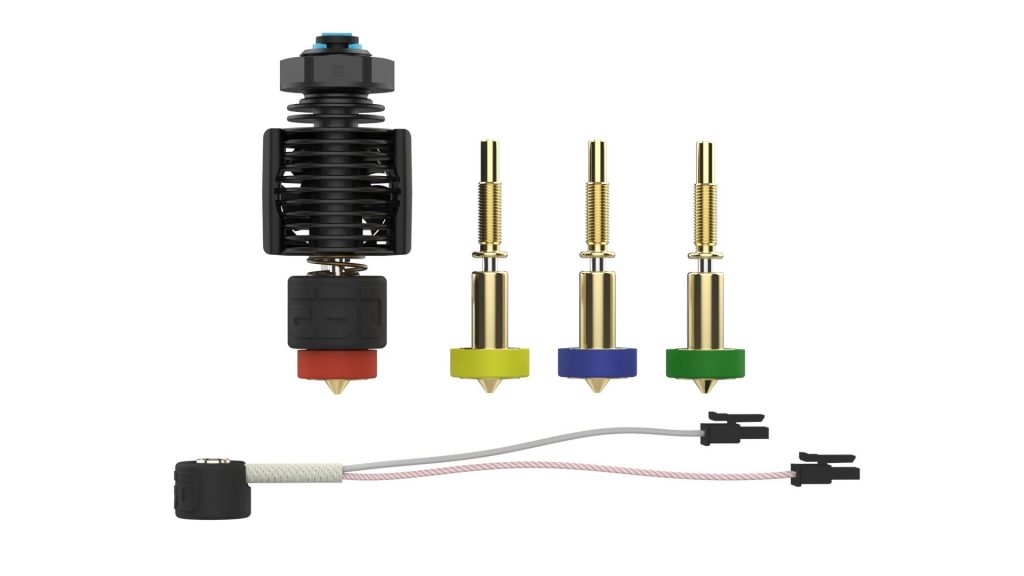
E3D Revo: different nozzle sizes (color coded) manually interchangable
Also in fall of 2021 E3D announced its new generation of print heads, Revo:
manual (un)mounting of print head without tools
nozzle and heatbreak combined
spring loaded tension of heat cartridge with nozzle
partially patented
2022: MakerBot & Ultimaker Merge, Bambu Lab’s X1
In May 2022 MakerBot, owner of Thingiverse and part of Stratasys, announced together with Ultimaker they would merge the coming months, and in September announced to become UltiMaker. MakerBot, who plays no significant role in regards of hardware development anymore, and software development being neglected as well, incl. Thingiverse lumping since many years.
Ultimaker became monetary successful the past years is also showing inertia in hardware innovation, resting on existing hardware designs, at the same time committed to push software development with Cura slicer with fine-tuning details of the slicer, and still doing most of it under Open Source, admirably.
Bamboo Lab X1
Another significant announcement happened in May 2022: Bambu Lab, founded by former DJI (drones) employees, worked the past two years on a new printer called “X1“, which has features hardly even seen in industrial 3D printers:
printing fast at 400mm/s with 10,000 to 20,000m/s2 accelleration
auto leveling (no manual calibration)
auto tuning pressure advance with LiDAR sensor
first layer analysis with LiDAR sensor, measure height and width of extrusions
video analysis of failed prints using built-in camera and AI
multiple materials (up to 16 spools/materials)
dedicated slicer (being open sourced later)
competitive price with USD 900-1500
The only downside is the rather moderate build-volume with 256x256x256mm, but they control that tightly unlike anyone before.
2023 & 2024: Incremental Upgrades
Formlabs resin printer series 4 switched from laser based SLA to UV-light & LCD based MSLA procedure (EUR 5,000-10,000), like the rest of prosumer and consumer resin printers. In June 2024 Micronics LLC launched a Kickstarter compaign for their SLS printer priced at USD 2,500, and after the finish of the compaign, the company was acquired by Formlabs.
Resin printing with more specialized resin types entering SLS and FDM domain (from Formlabs Keynote 2024):
Prusa Research introduced SL1S resin printer in 2021 with a tilting vat, and Elegoo followed then with Mars 5 Ultra & Saturn 4 Ultra in 2024, priced at EUR 300 & 400, also having a tilting vat / tilt release mechanism, which decreases layer printing time by ~50% from ~10s to ~5.5s, and therefore overall printing time as well, e.g. increase from 18mm/hr in Z height to 32mm/hr at 50μm or 64mm/hr at 100μm layer height.
Elegoo also introduced a massive FDM OrangeStorm Giga with a build volume of 800x800x1000mm, priced at EUR 2,500. Sovol SV08 (Voron 2.4 / CoreXY) becomes available at USD 750, with a build volume of 350x350x330mm.
It seems Bambu Lab has reached of market share where they are relevant for Stratasys, e.g. also protect their UltiMaker branded prosumer FDM series which have shown no relevant innovation since 5+ years.
2025: Price of Closed Source, Tool Changers
Bambu Labdecided (2025/01/17) to change the way their printers are accessed, introducing “security” locking 3rd party software and hardware out, and breaking thereby workflows and trust into the company and their printers. Smaller 3D printing companies seem to like Bambu Lab for its reliability and integrated eco-system – two sides of different demands.
Multi Material with Tool Changer
Tool changer is the way to go to print multiple materials with different temperatures or different colors with minimal purging/cleaning, as one only have to purge the “cooked” (remained) filament is waiting and become reused again.
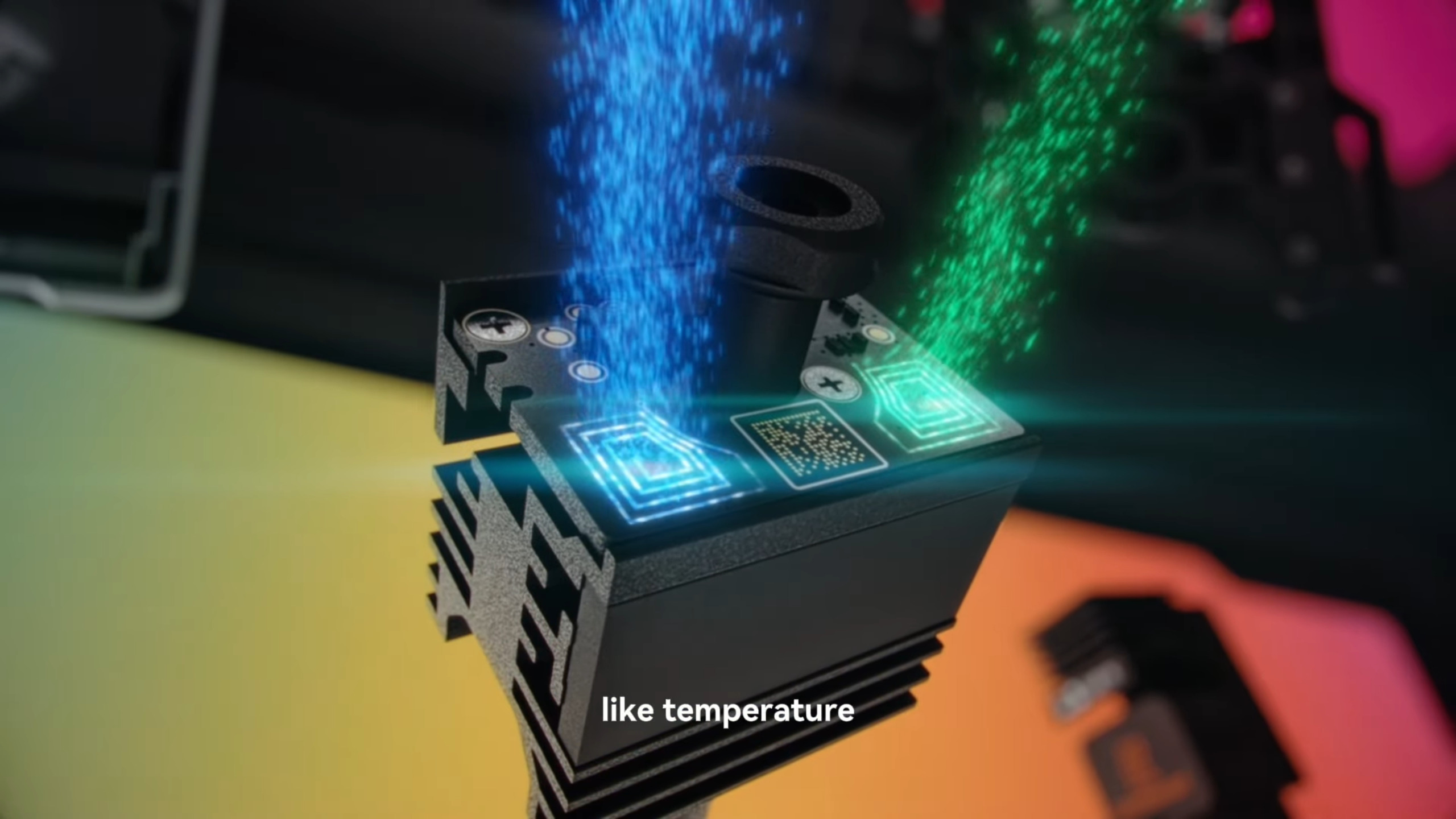
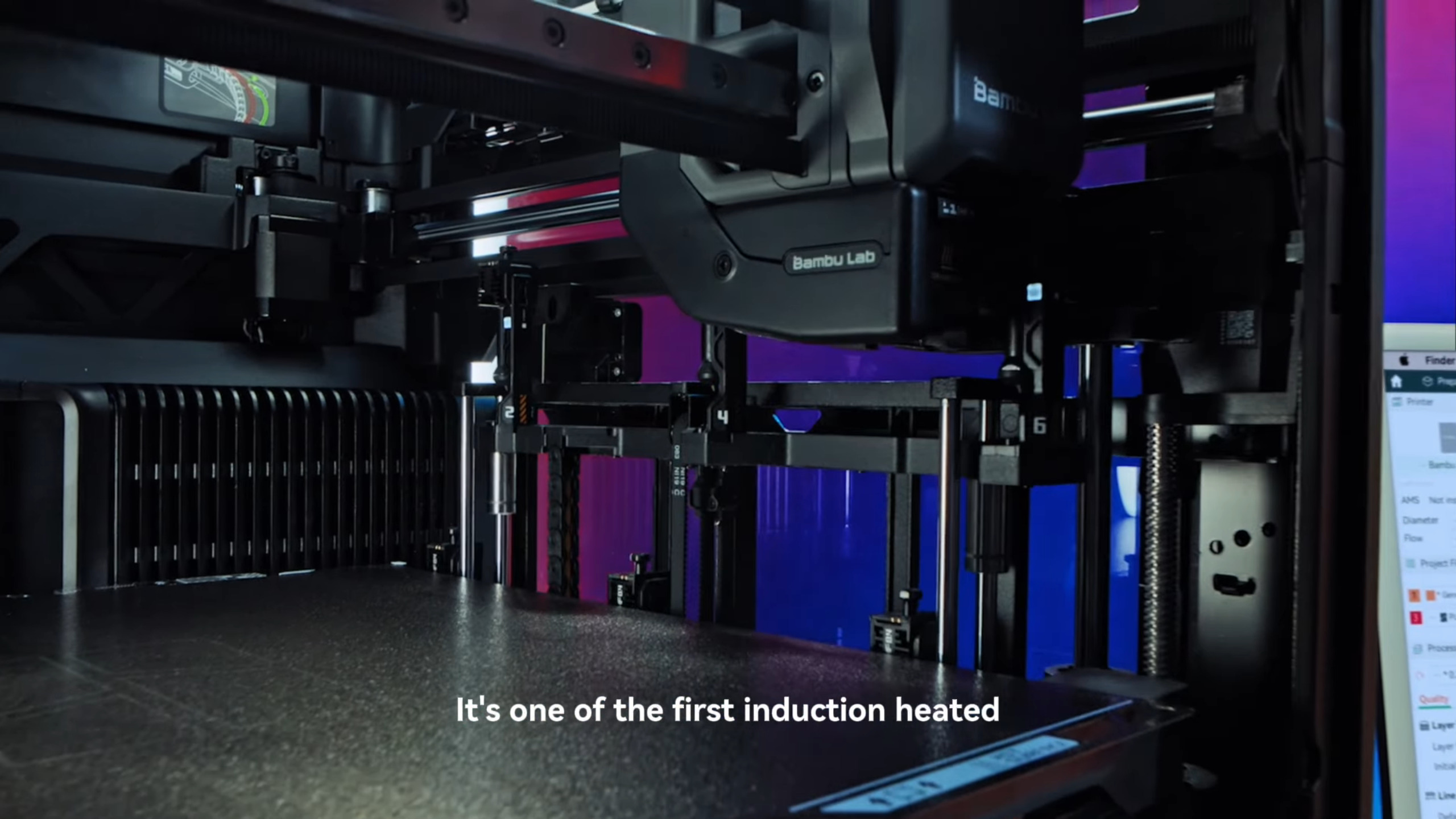
Bambu Lab announced their complex Vortek tool changer: a hotend with active electronics (power & data) to measure temperature and tool information – the main heating is done via induction, hence also wireless; apprx. 12s tool change time (without purging).
BambuLab VortekBambuLab Vortek: wireless power & dataBambuLab Vortek: tool rack
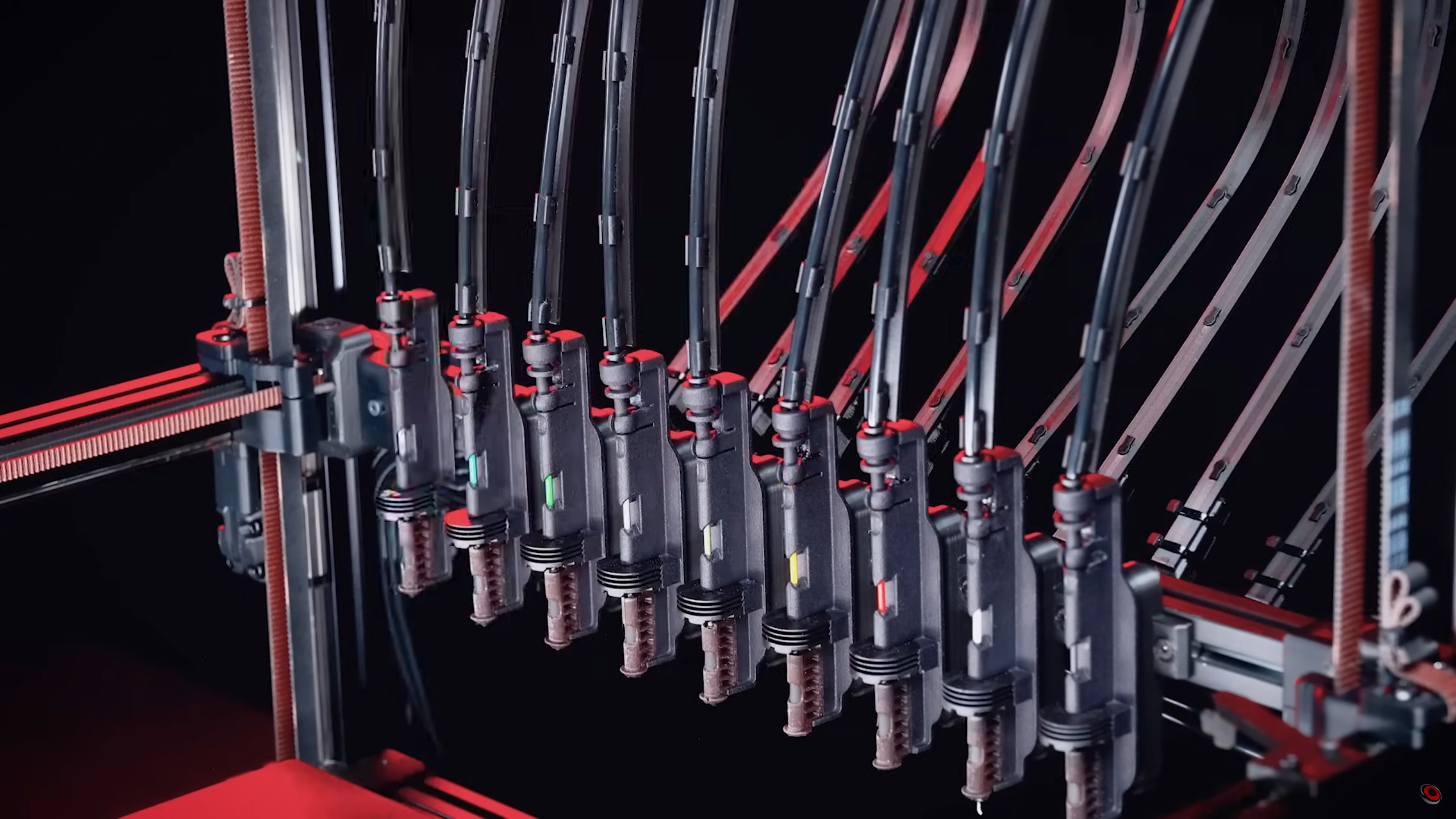
Bondtech announced their INDX tool changer: a solely passive hotend which is heated also with induction, and the temperature measured from outside via IR sensor – you take and put back a hotend with the filament still inside, apprx. 14s tool change time (without purging).
Bondtech INDXBondtech INDX: many hotendsBondtech INDX: hotend closeup
Adrian Bowyer – father of RepRap – gave an interview (2025/12) to Prusa giving some update where he is at:
printing material research ABS, PLA and other materials
slicing algorithms
deciding to use Arduino as motor controller
Notable Excerpts
RepRap Family Growth
Adrian Bowyer summarizes RepRap history April 18, 2011, in brackets the amount of RepRaps:
Spring 2007 – The first RepRap Darwin was finished. Its RP parts were made in a Stratasys Dimension. [1]
During that summer we made four or five sets of parts for the machine in the Stratasys and sent them to RepRap team members round the world.
September 30, 2007 – Vik Olliver in New Zealand finished the second Darwin. [3]
Around Christmas 2007 – A number of people start to make wooden and lasercut copies of Darwin. The Bath RepRap Lab also supplied a Stratasys-printed set of Darwin parts to Ian Adkins of Bits from Bytes, who created silicone moulds from them and started selling Darwin copies made by PU moulding. [8]
February 21, 2008 – Zach Smith (now also of MakerBot) gets his Darwin working. [20]
February 22, 2008 – Ponoko have a lasercut version of Darwin. Spring 2008 – Lots of the wooden and moulded Darwin-type Repstraps are working, and people start using them to print RepRaps.
April 2008 – Nophead starts printing Darwin parts on his Repstrap Hydraraptor. [60]
May 29, 2008 – Vik Olliver’s Darwin has made a full set of parts for another Darwin; these are assembled in New Zealand and finally tested when he visits at Bath University in the UK. This is the first true RepRap replication. [100]
Summer 2009 – RepRap Mendel introduced. [400] Around this time Nophead, I, and many others went into serious production selling reprapped sets of parts for RepRaps made in RepRap machines on Ebay etc. Summer 2010 [1500]
Spring 2011 – Nophead alone has made over 100 RepRaps for other people. I have made over 50. [4000]
RepRap Darwin (2007)
RepRap Mendel (2009)
RepRap Huxley (2010)
Prusa Mendel Announcement
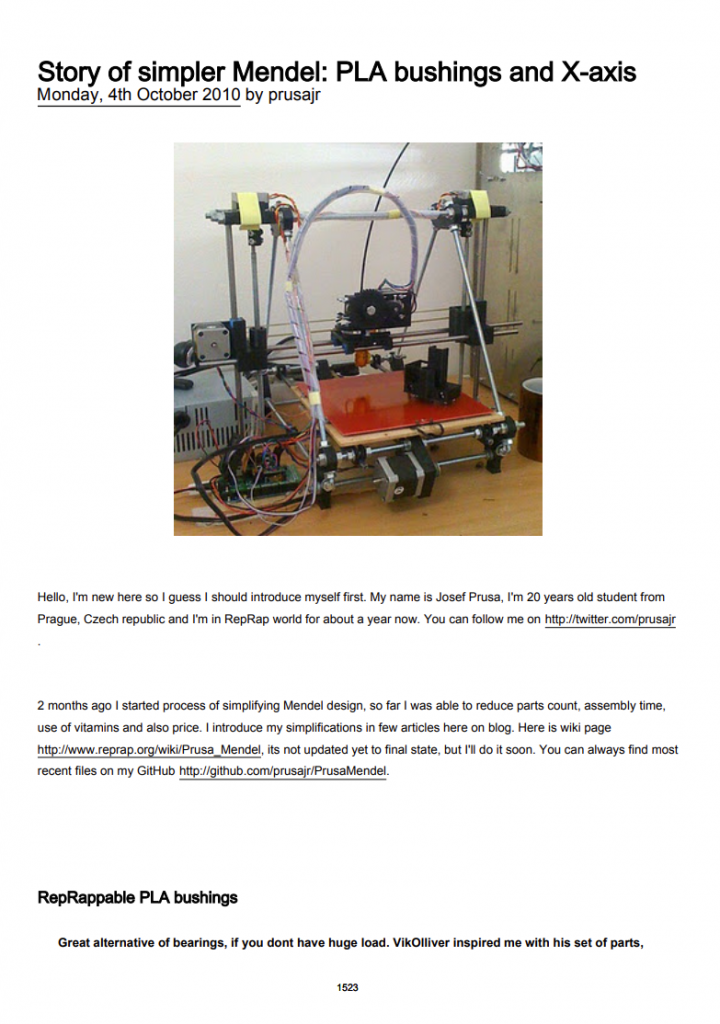
October 4, 2010 Josef Prusa announced his “Prusa Mendel“ version with this post:
He eventually iterated to “Prusa i3“ May 2012, which became quasi standard for low-cost FDM 3D printers.
Back in 2013 volunteers around Paulo Goncalves published 3 issues of the RepRap Magazine in PDF format – in 2018 those issues are hard to find (in particular issue 3), so I thought to republish them here with its original Creative Commons CC-BY-NC-ND:





























 RepRap Magazine Issue 1
RepRap Magazine Issue 1