2021/03/11: starting write-up with basic illustration
Introduction
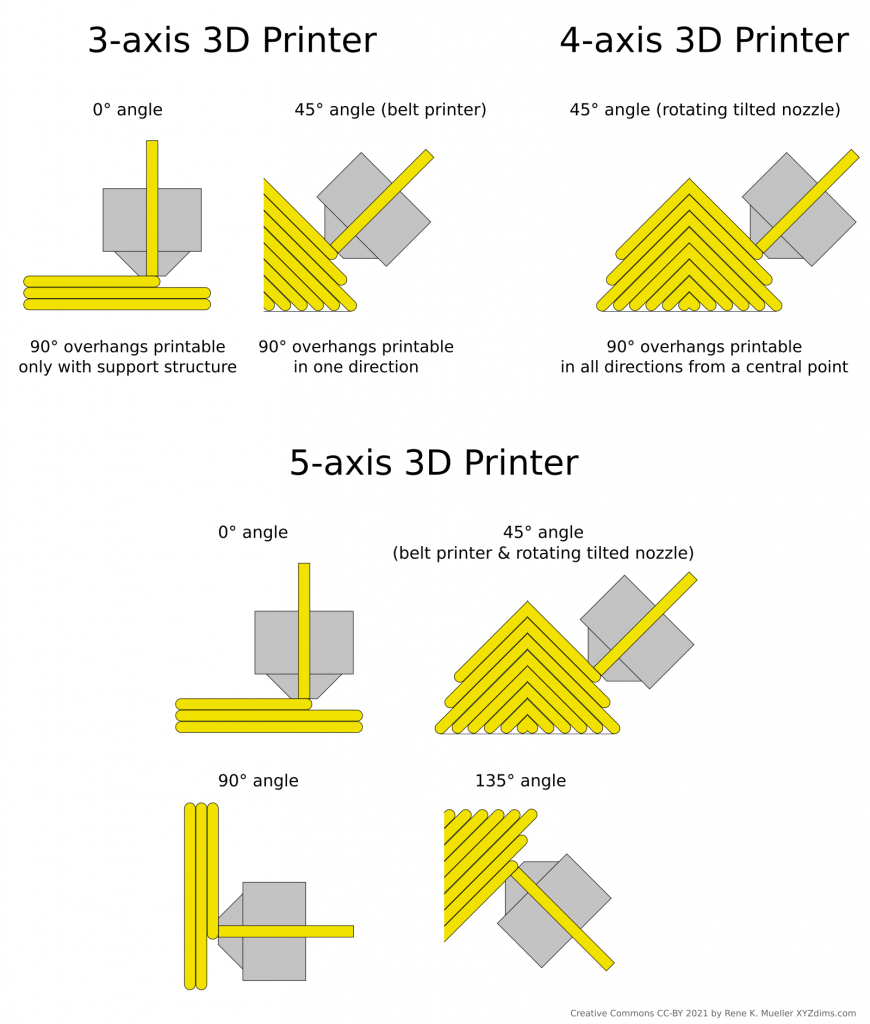
I thought to compose a summary of the features of 3 types of 3D printers I currently work on, and its relations to print 90° overhangs – main motivation to go beyond 3-axis 3D printing:
Functionality Commonalities
a 5-axis printer PAXhas the same features as a 4-axis printer RTN and 3-axis printer plus it can print at any tilt angle, printing 90° or more overhangs
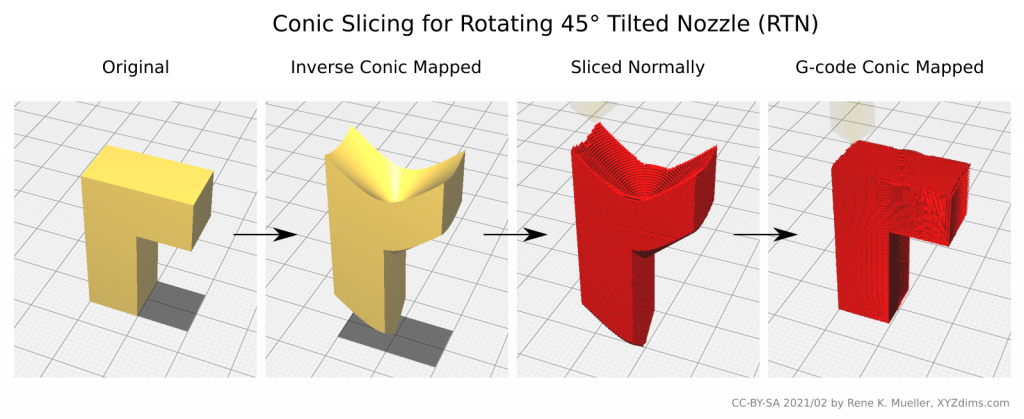
a 4-axis printer RTN prints conic- or angled sliced models so it can print 90° overhangs in all directions (conic slice) from a central point or single direction (angled slice); the tilt angle is fixed at 45°; Z sliced horizontal layers must be post-processed1) to be printable in acceptable quality but good quality cannot be achived in my opinion
a 3-axis printer by default cannot print 90° overhangs without support (unless it’s tilted 45° as for belt-printer, then only in one direction), but may printconic sliced models with 20-25° cone angle, henceprint 90° overhangs from a central point, and behave partially like a 4-axis printer
a suitable Zrot must be calculated and added to extrusion commands of the G-code, see this example.
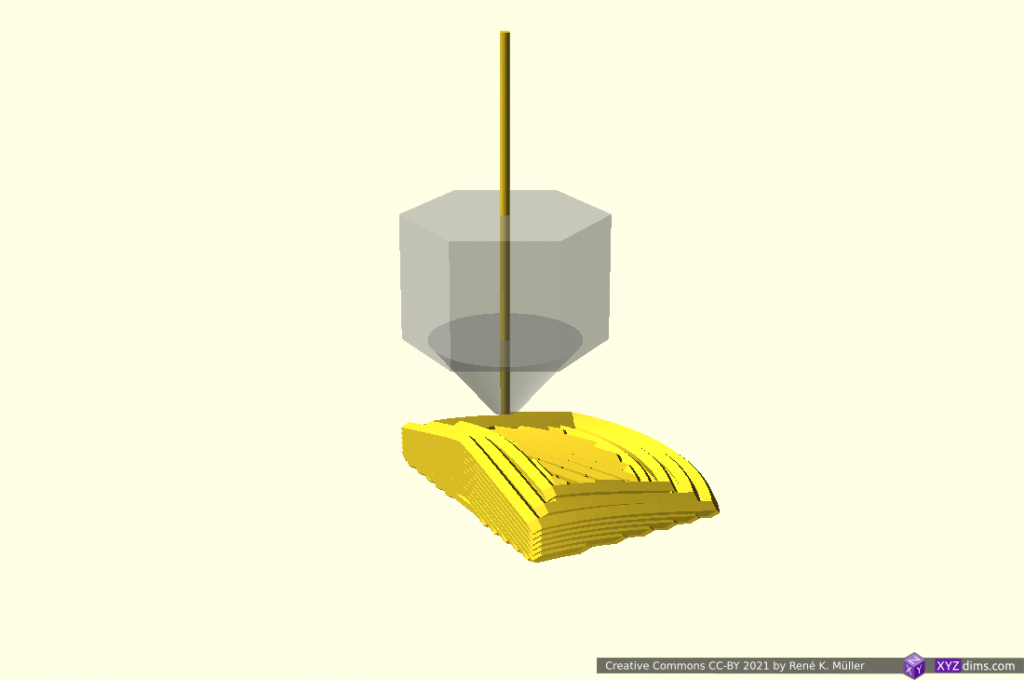
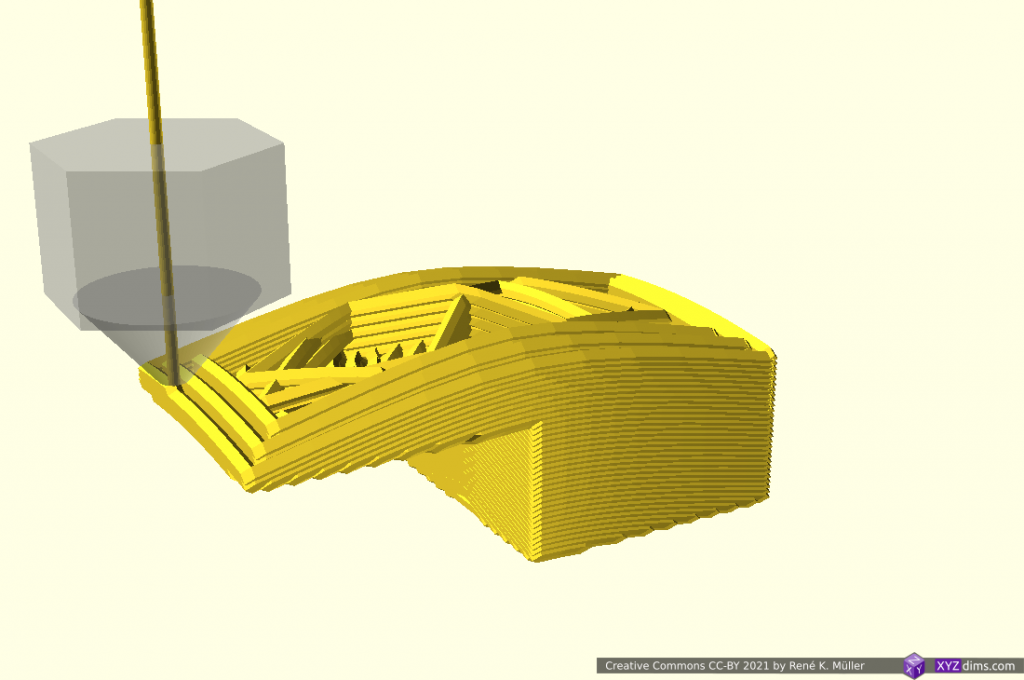
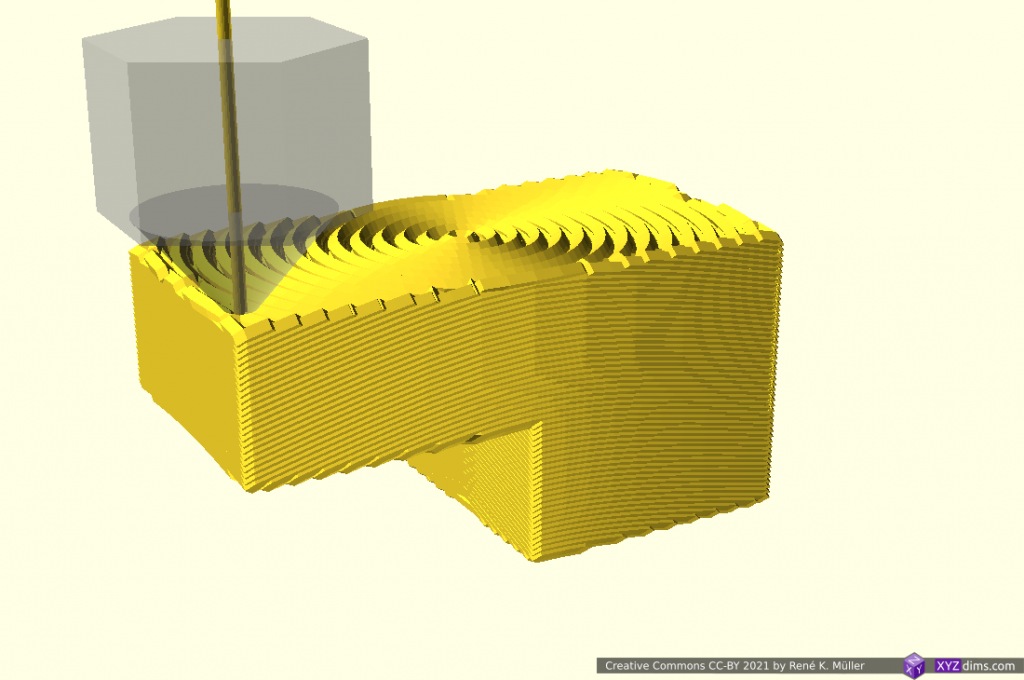
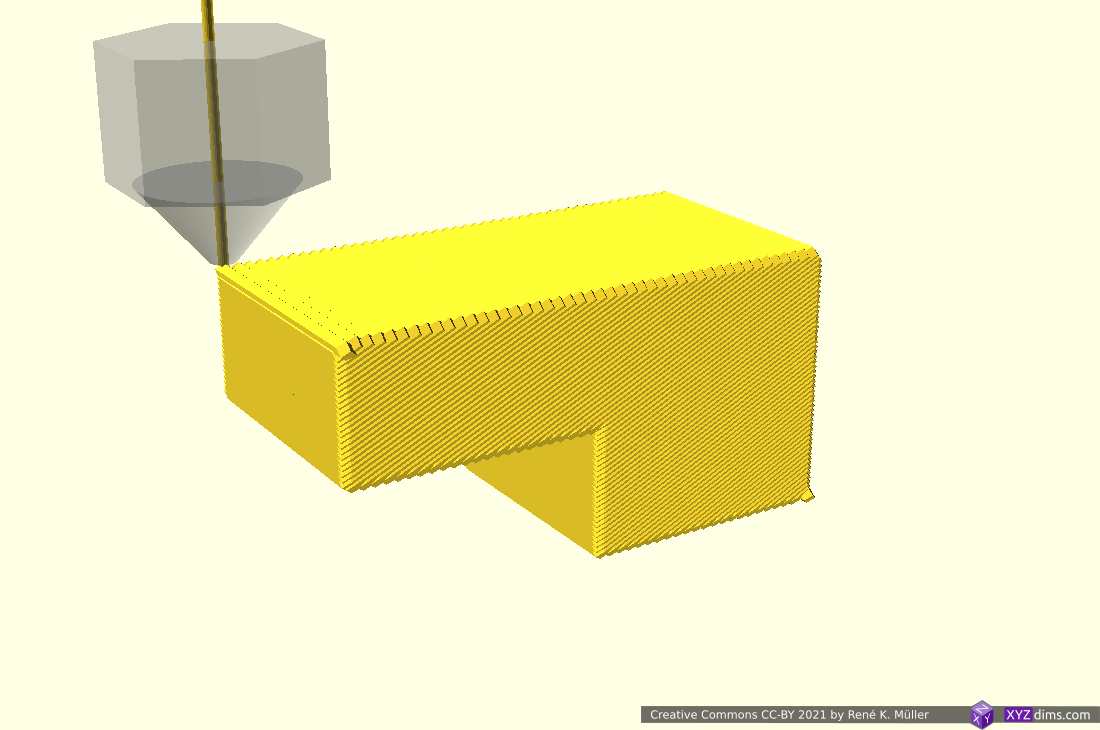
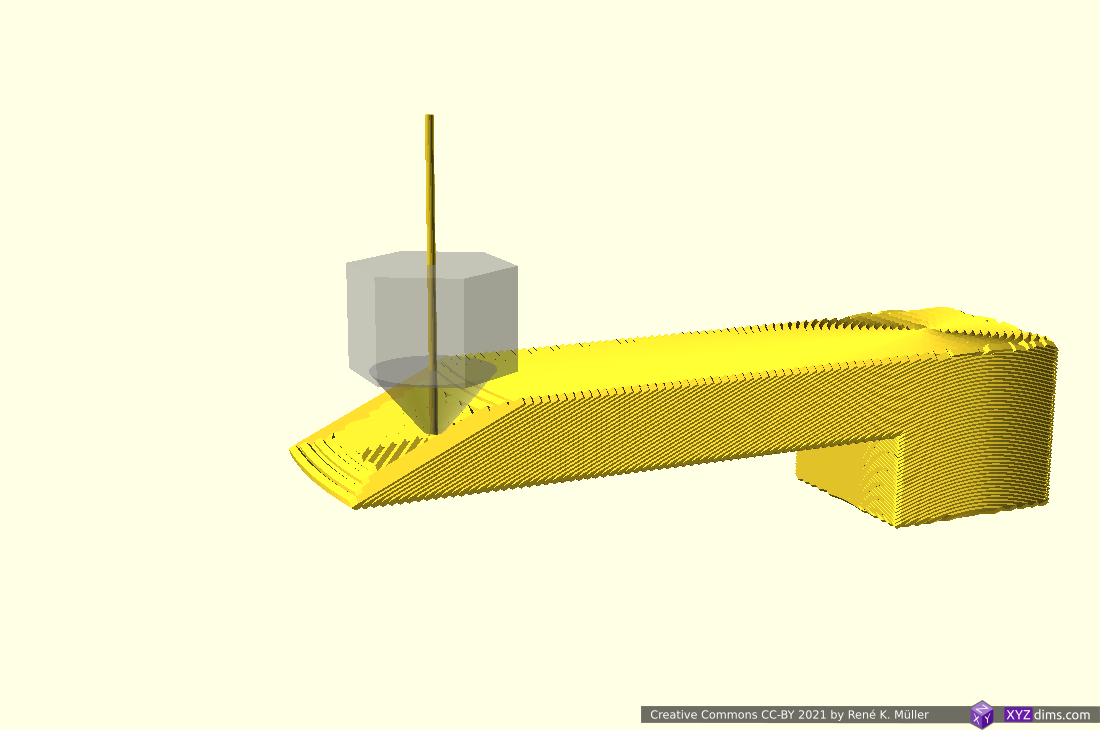
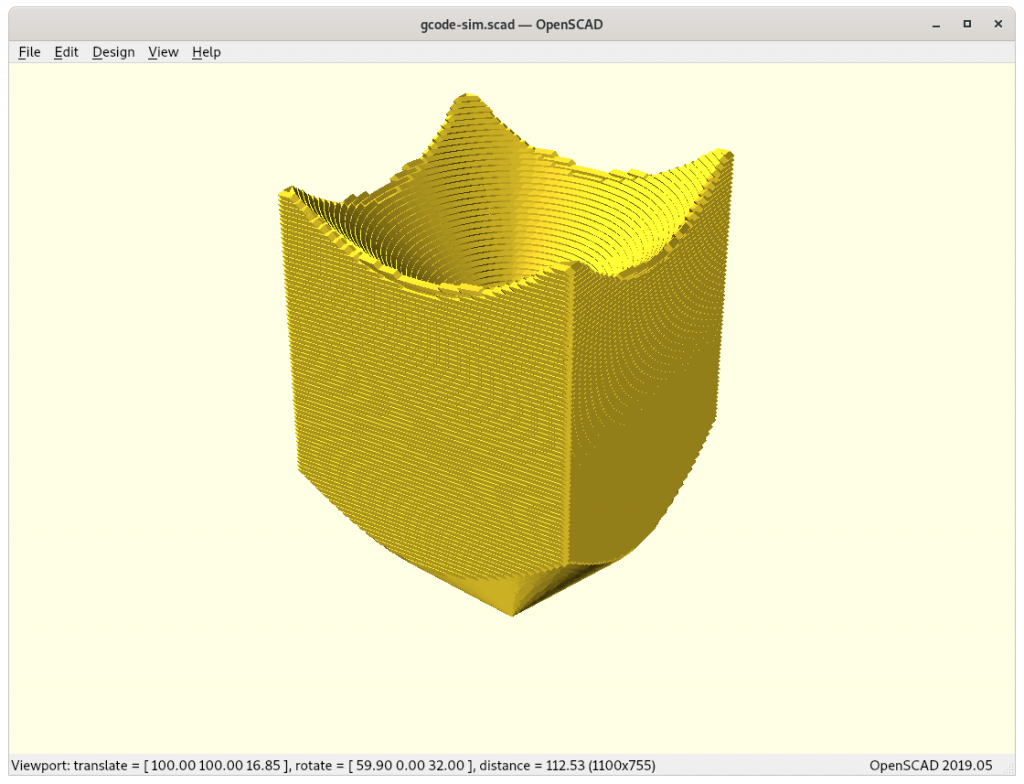
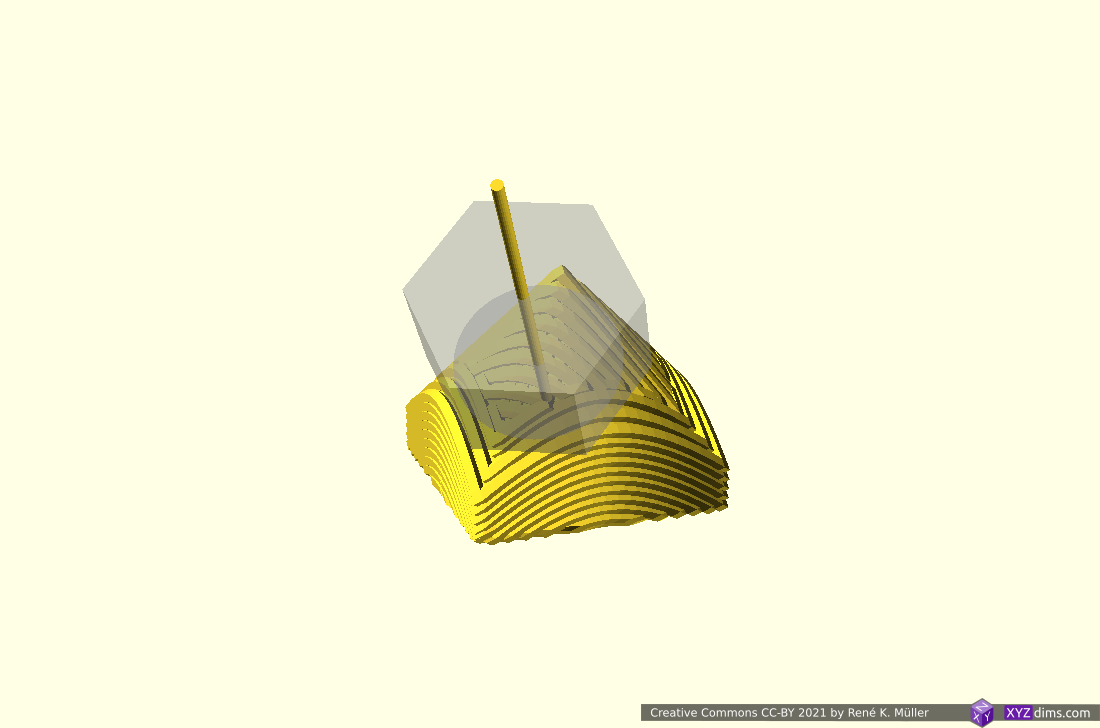
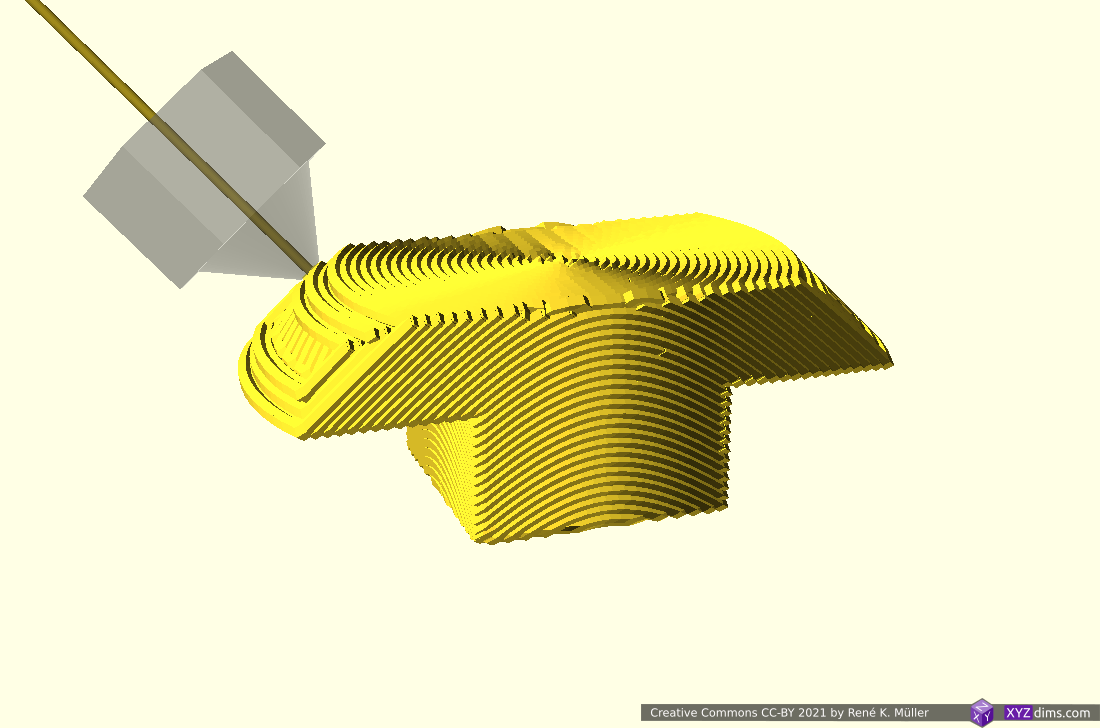
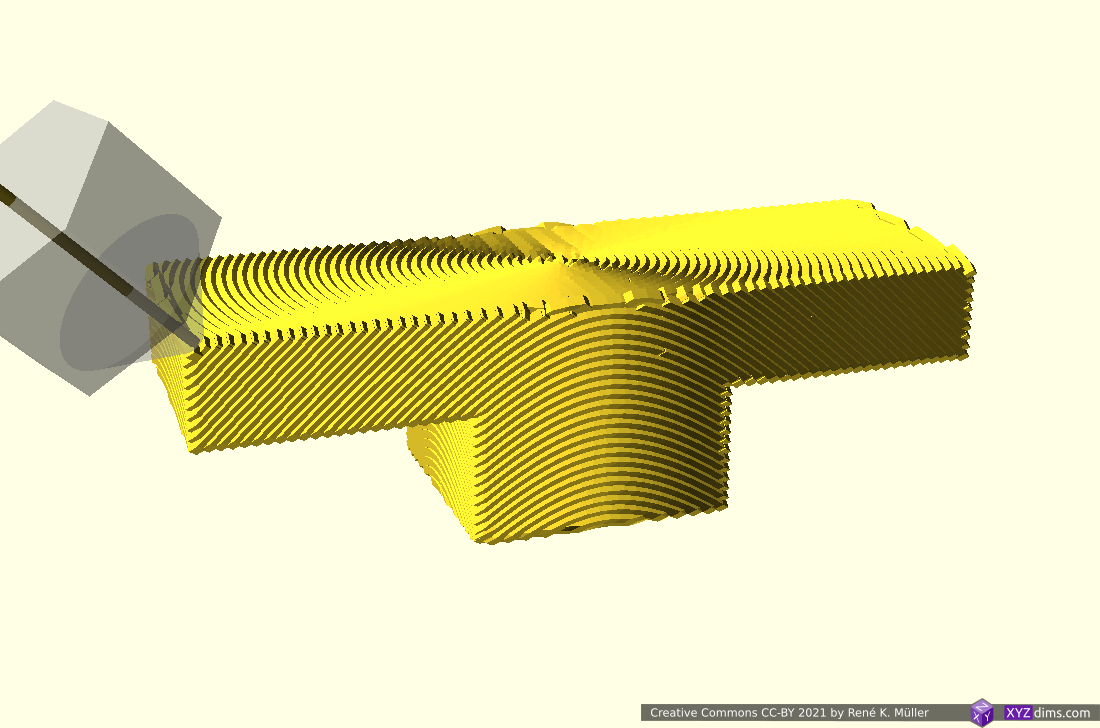
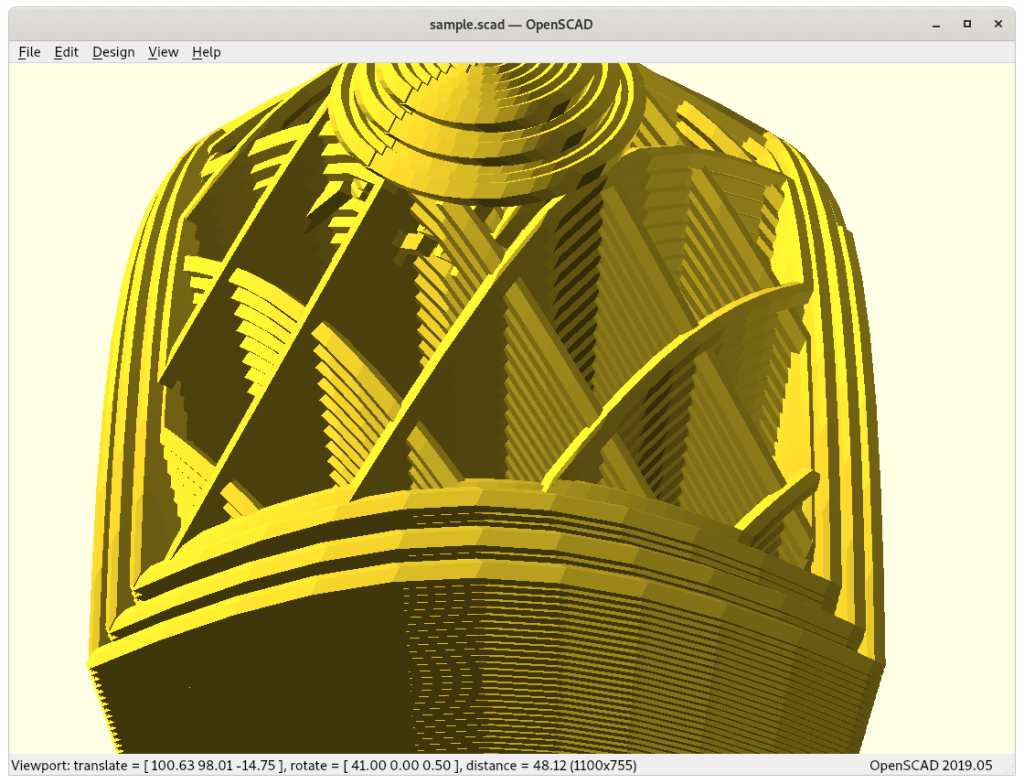
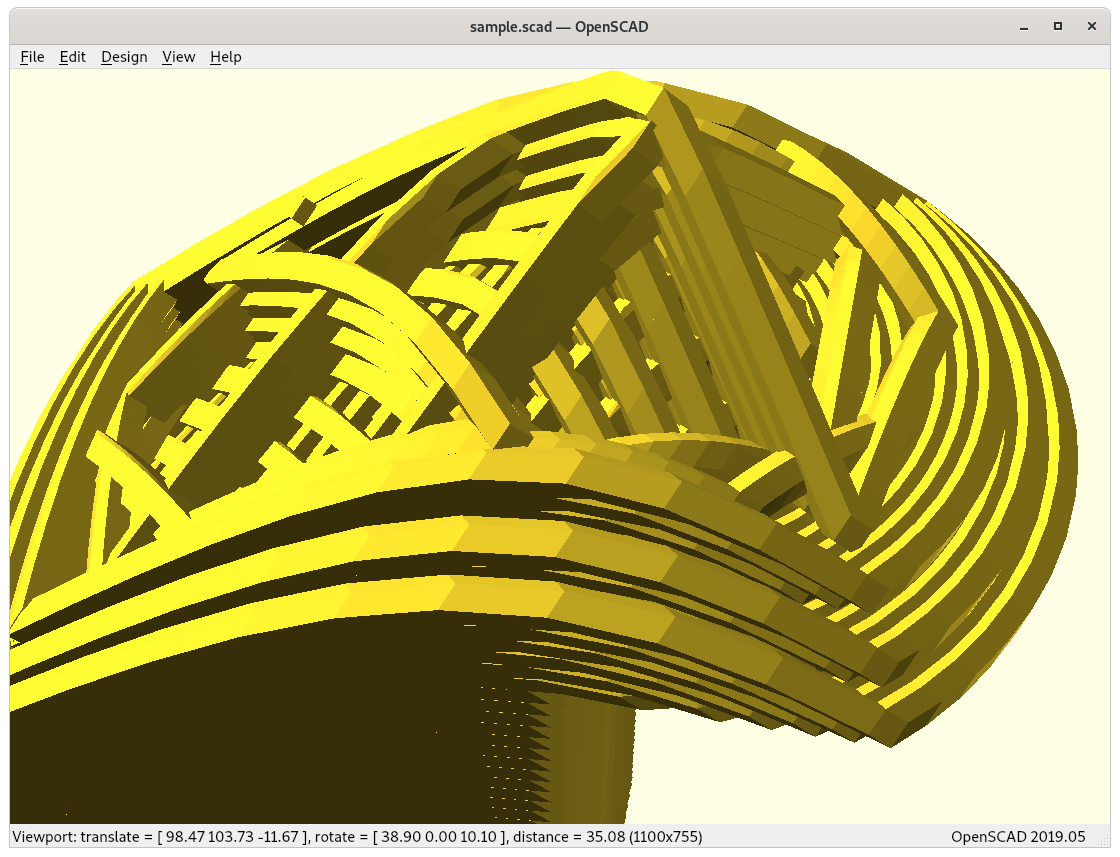
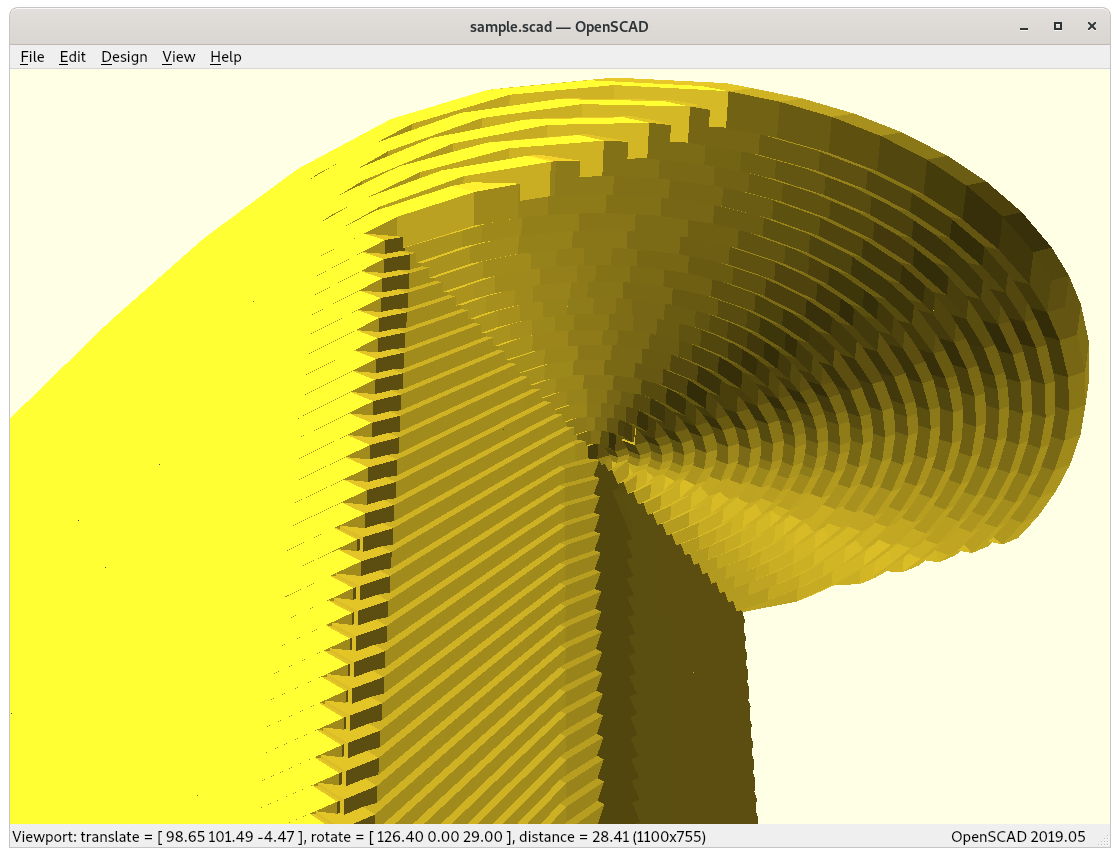
Printing an Conic Sliced Overhang
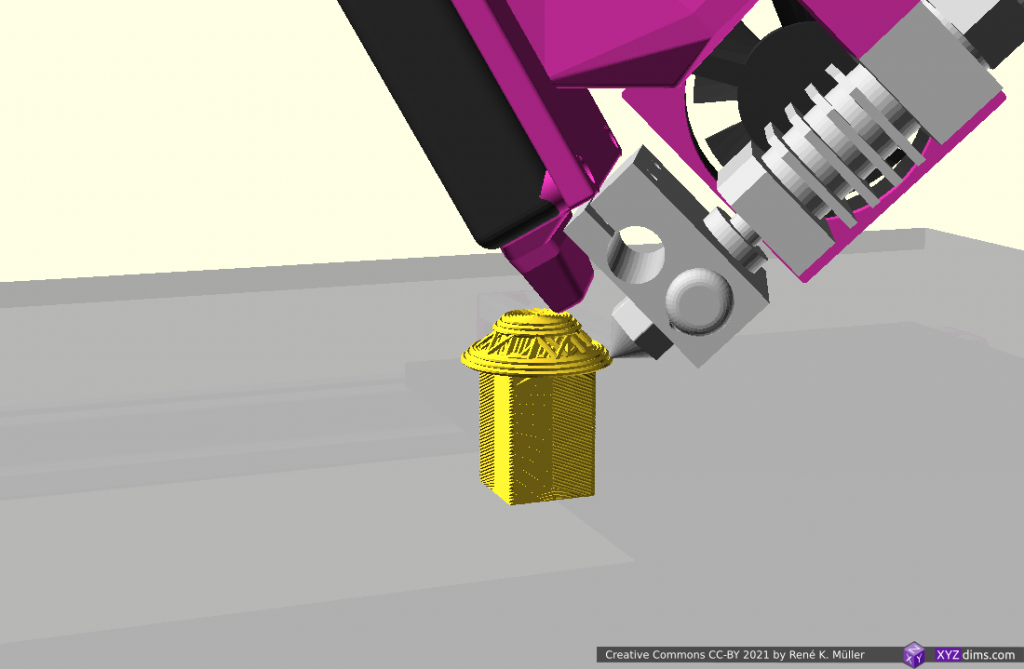
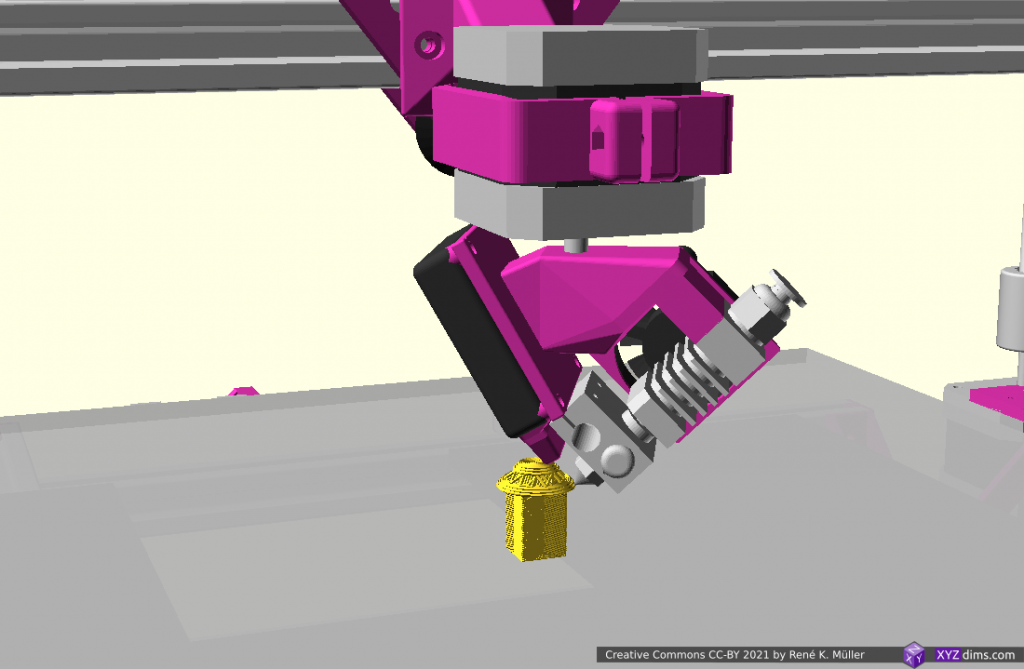
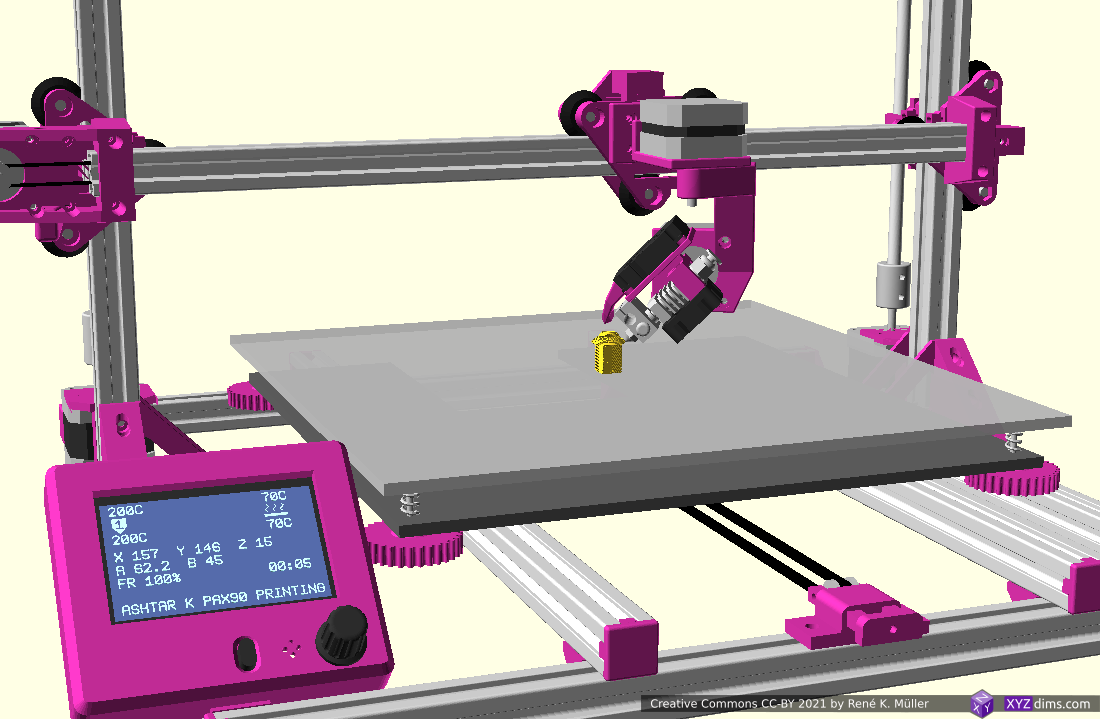
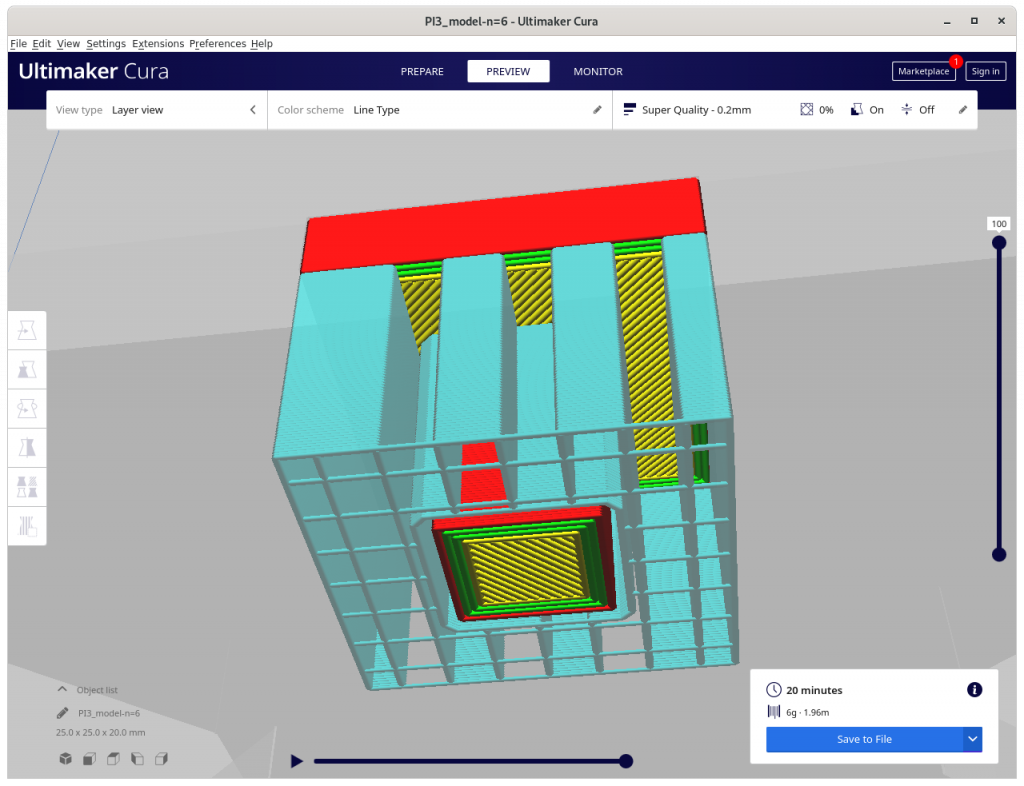
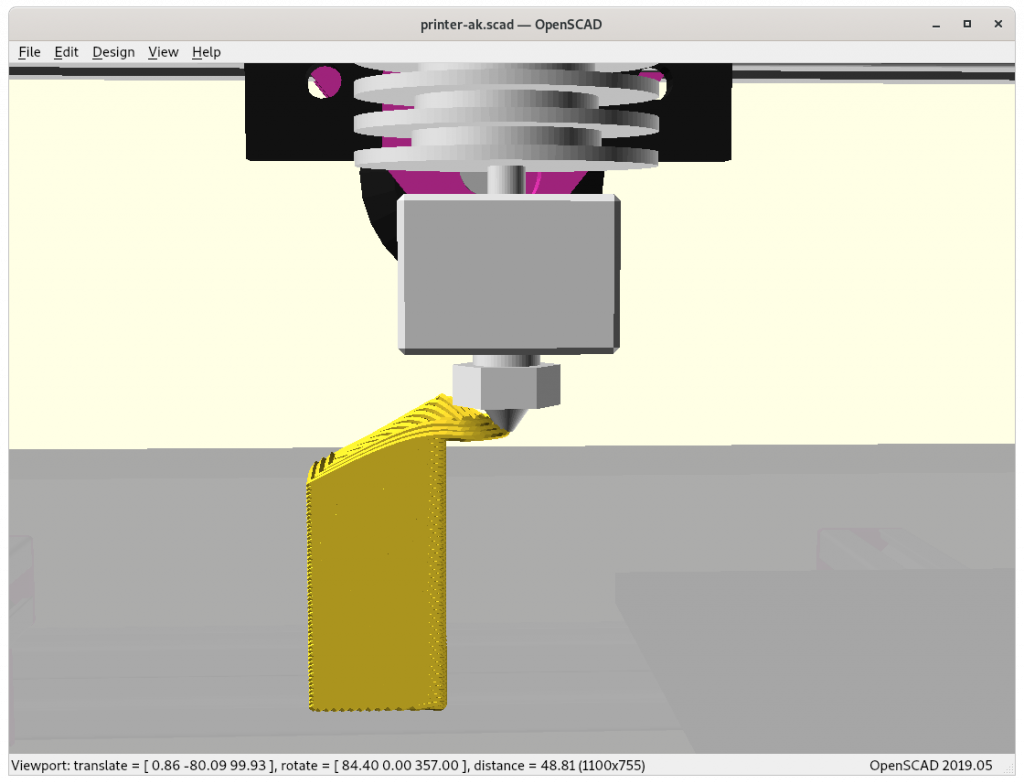
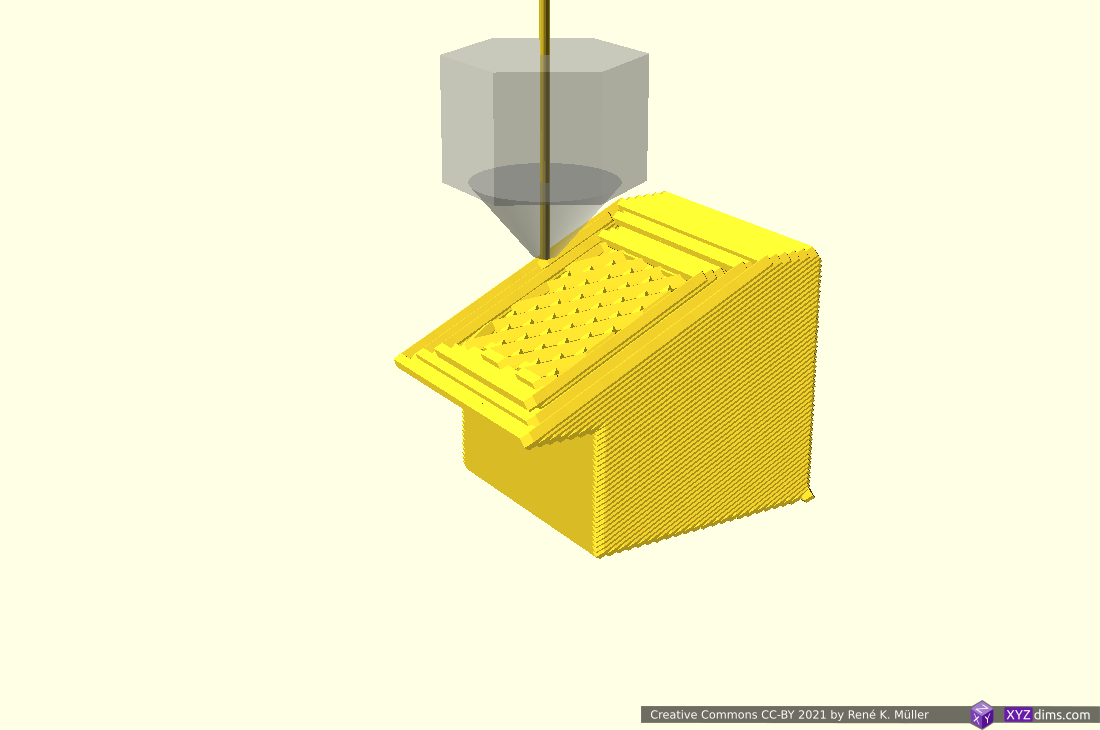
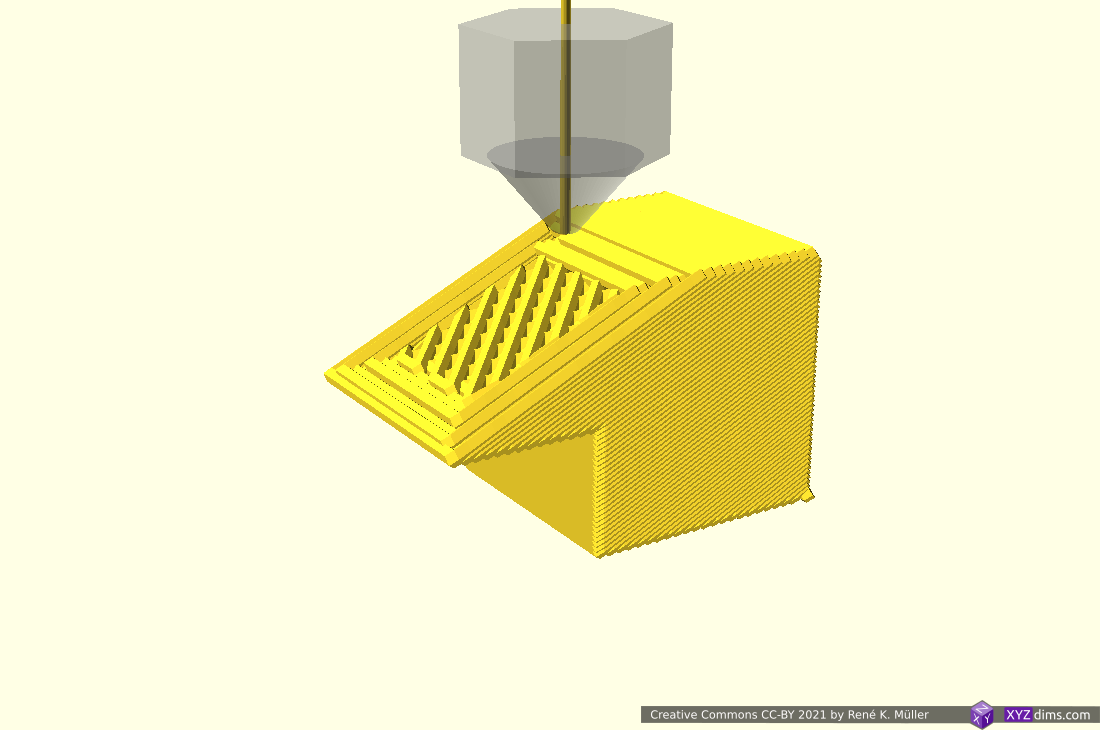
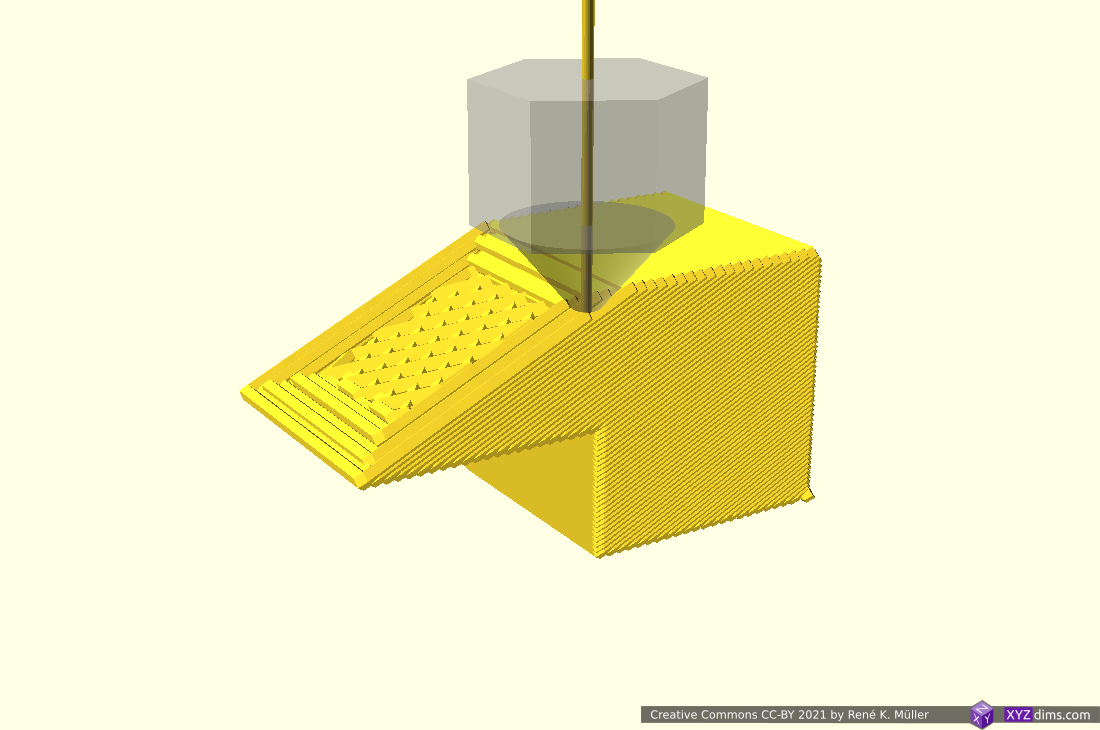
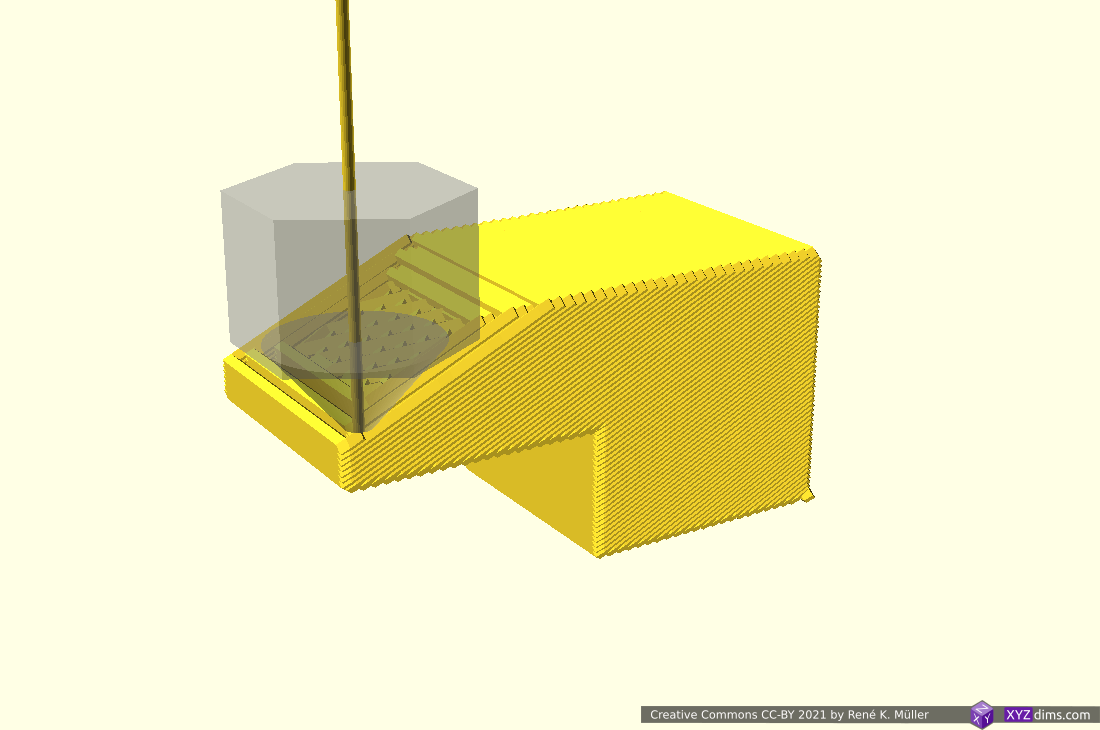
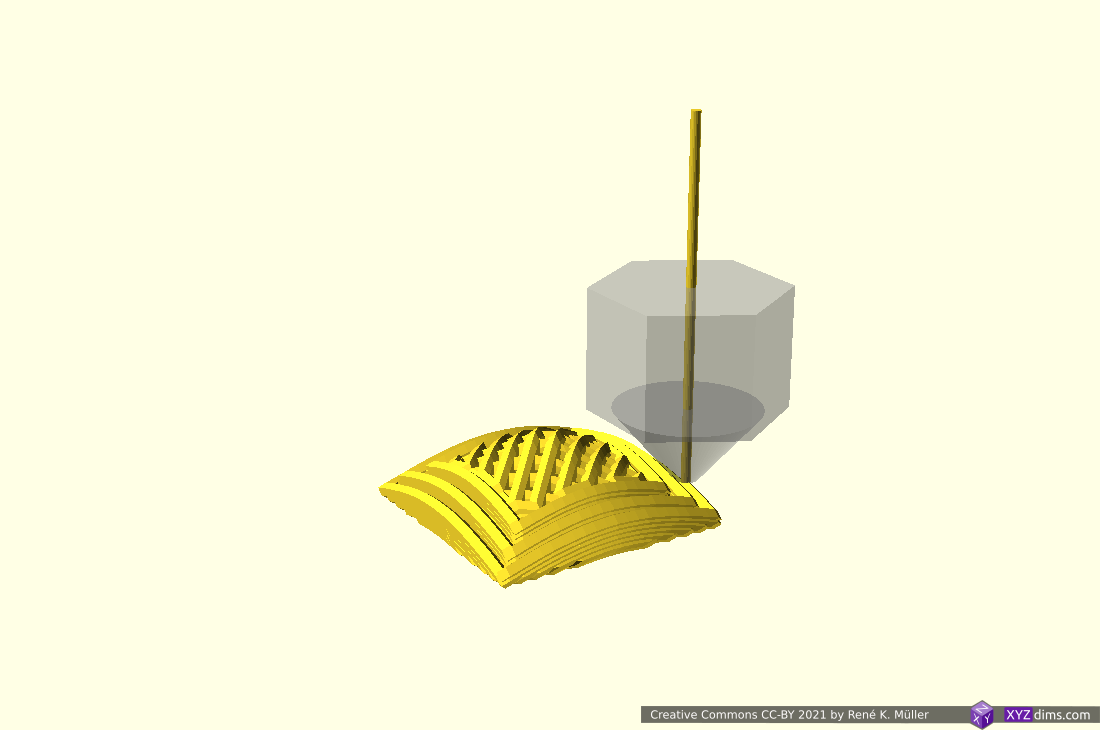
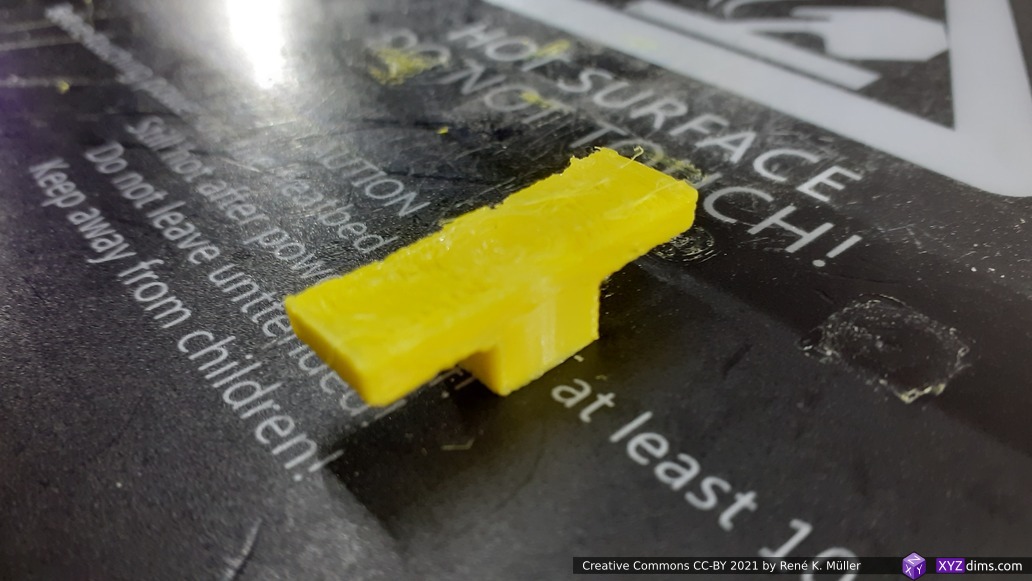
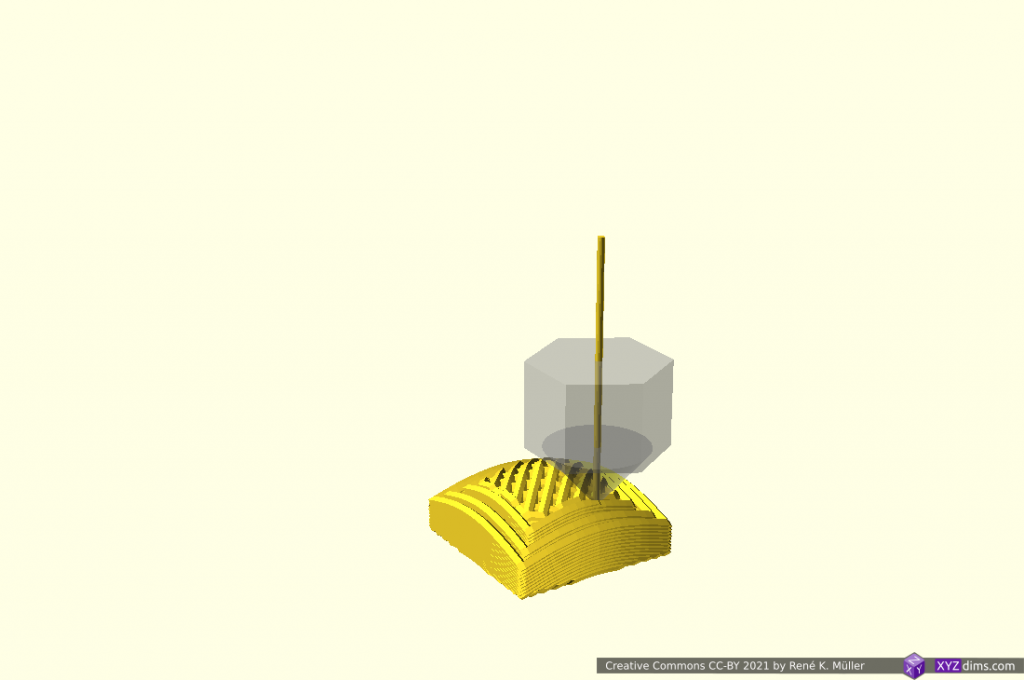
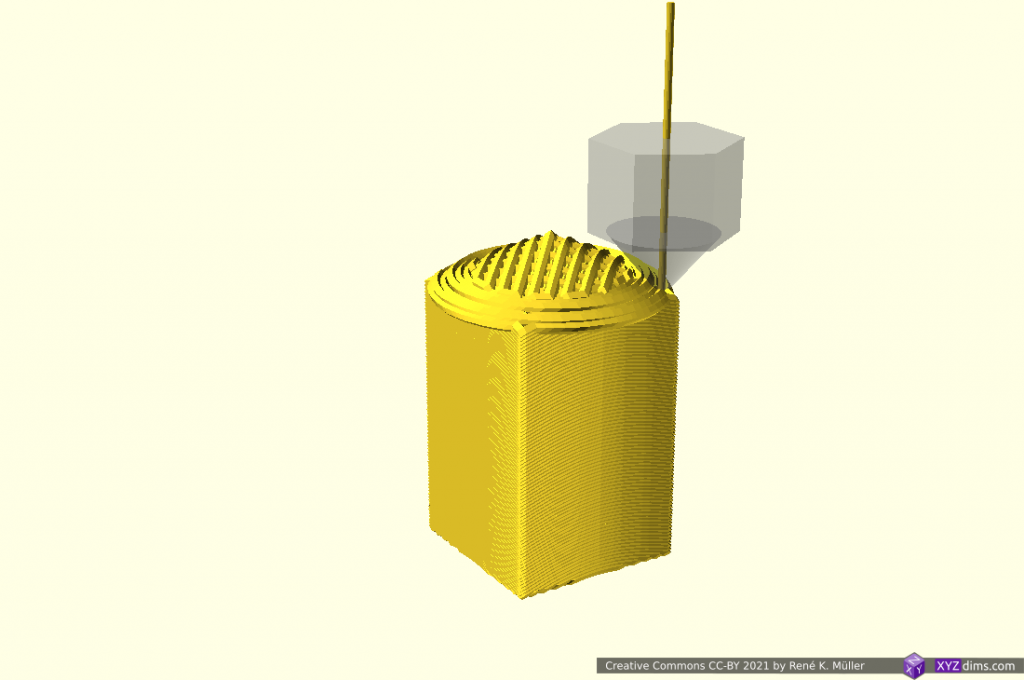
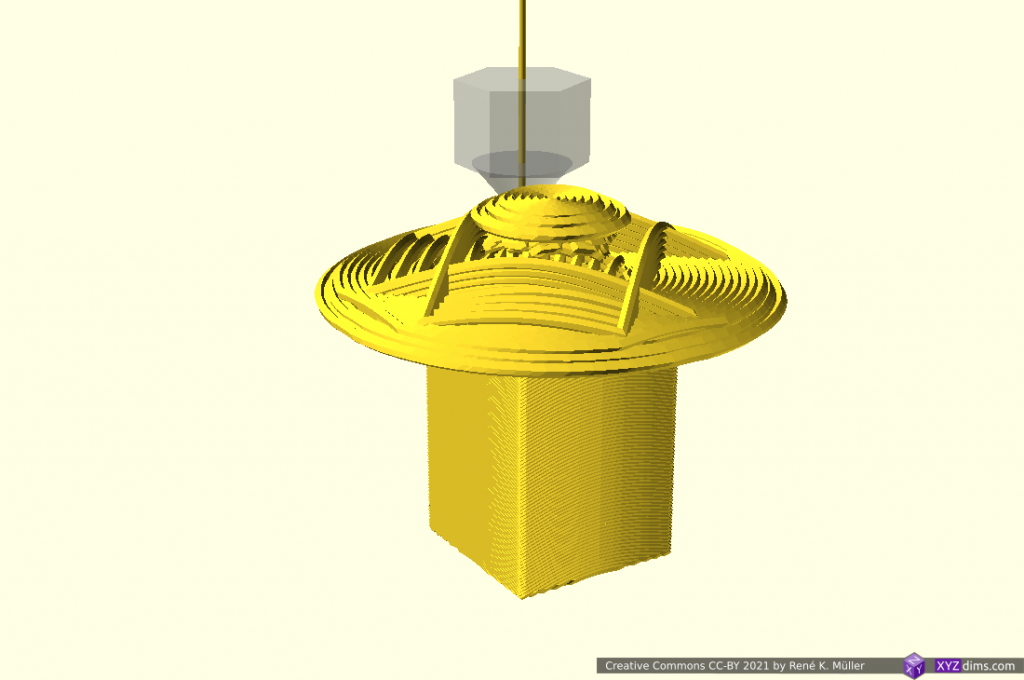
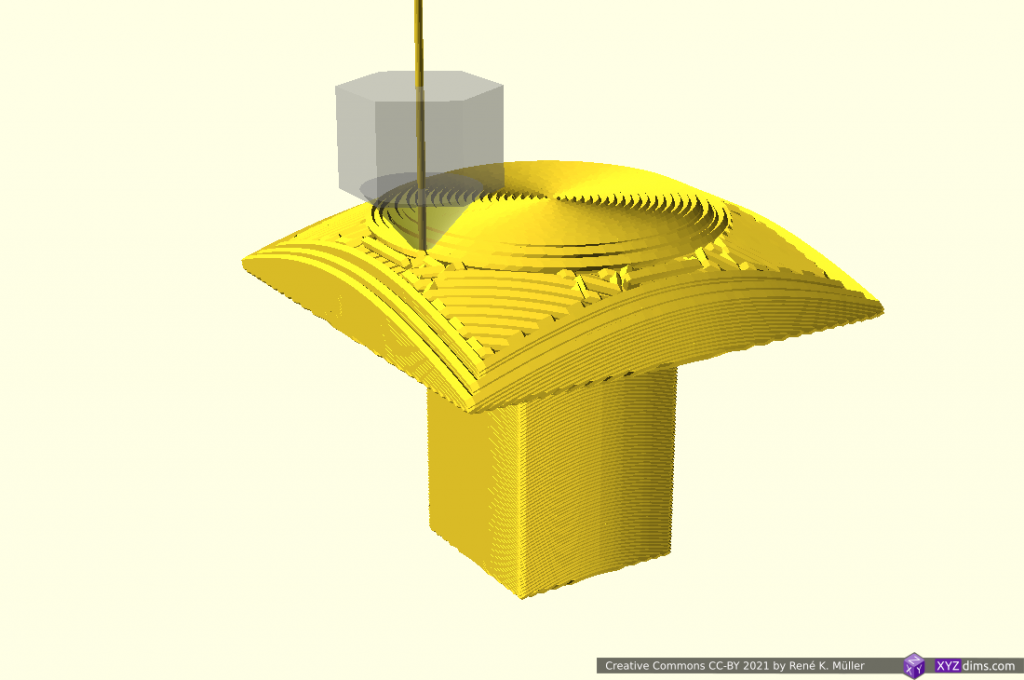
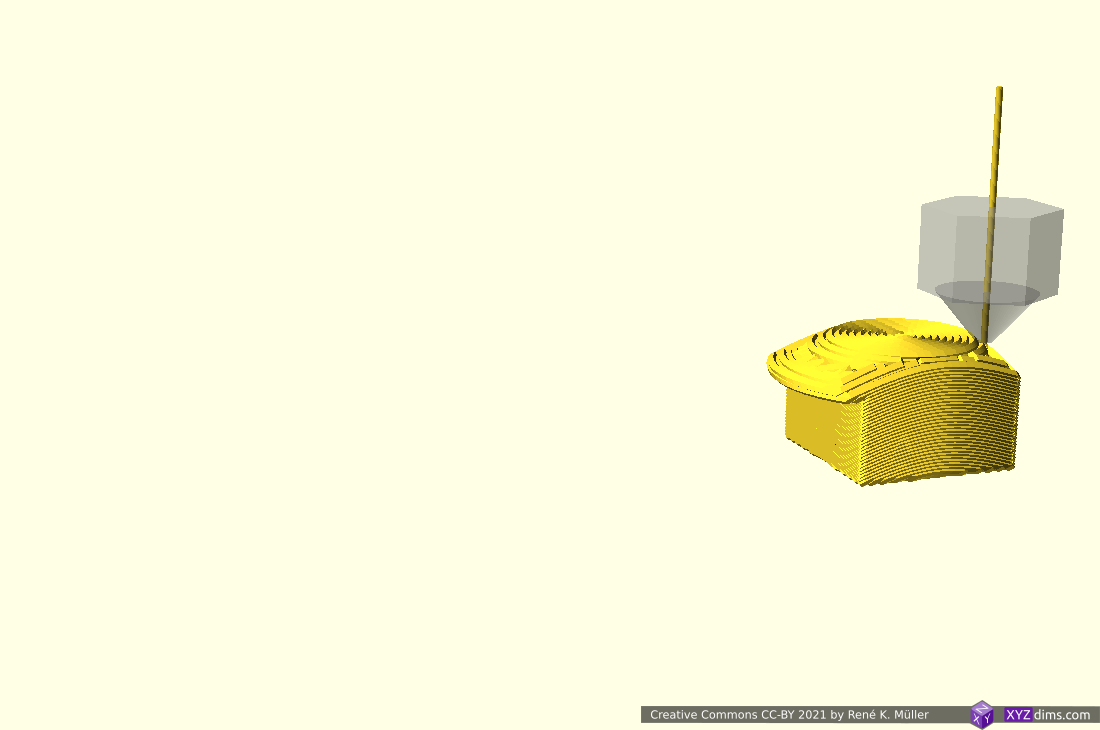
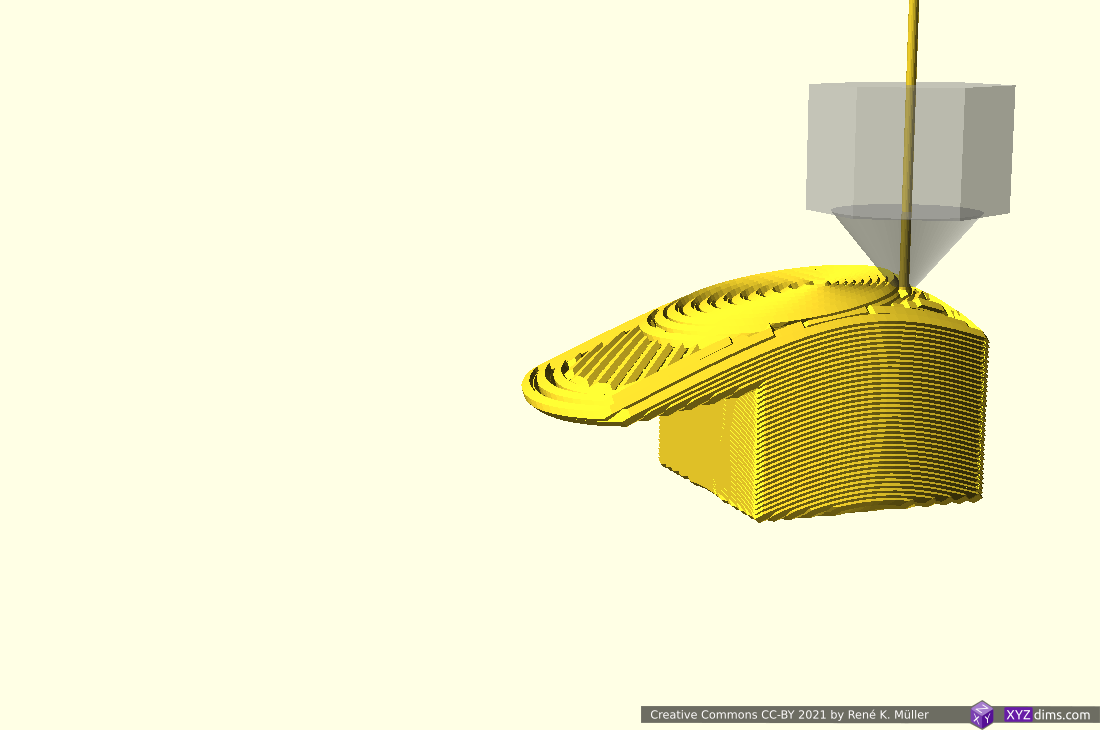
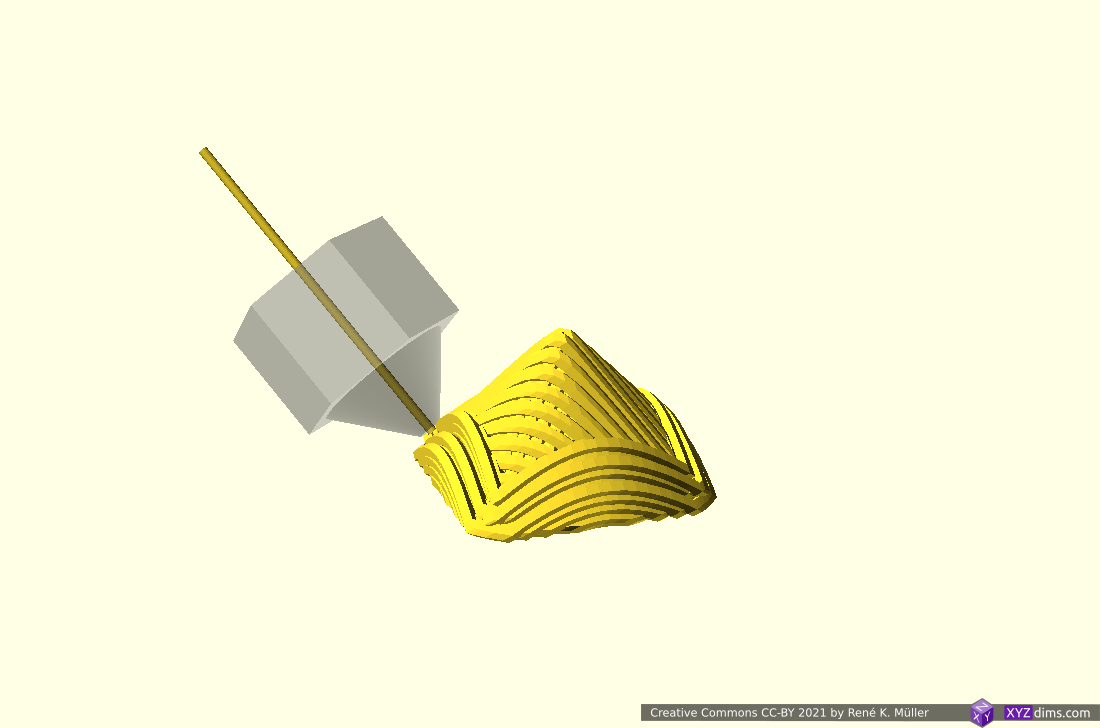
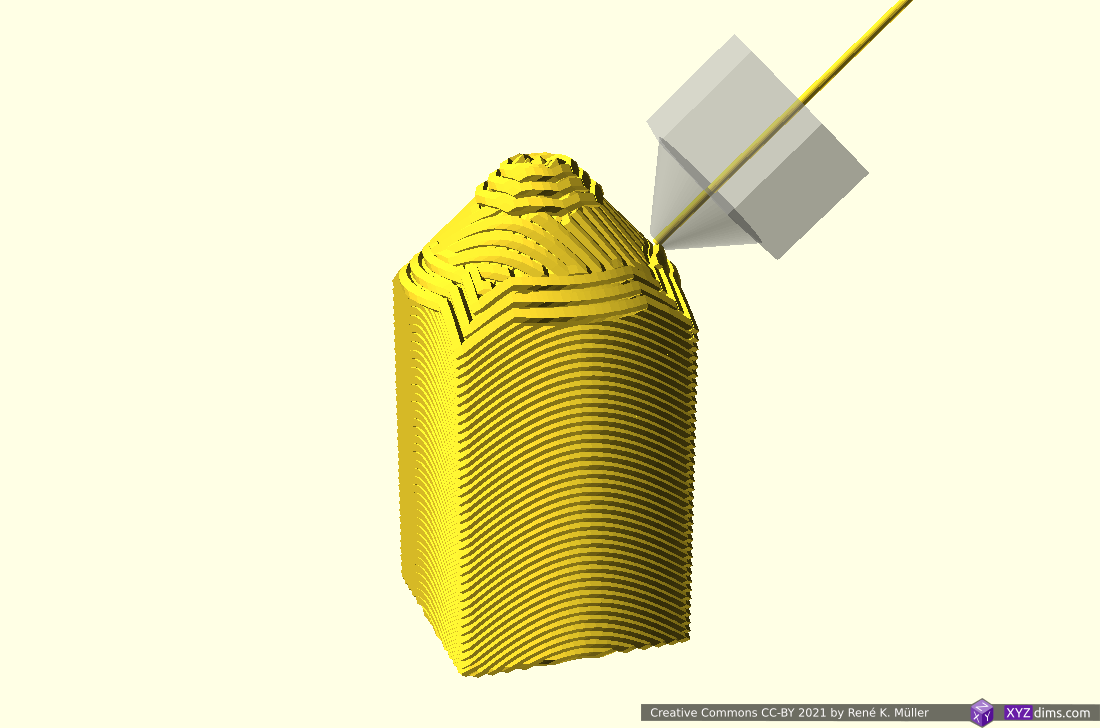
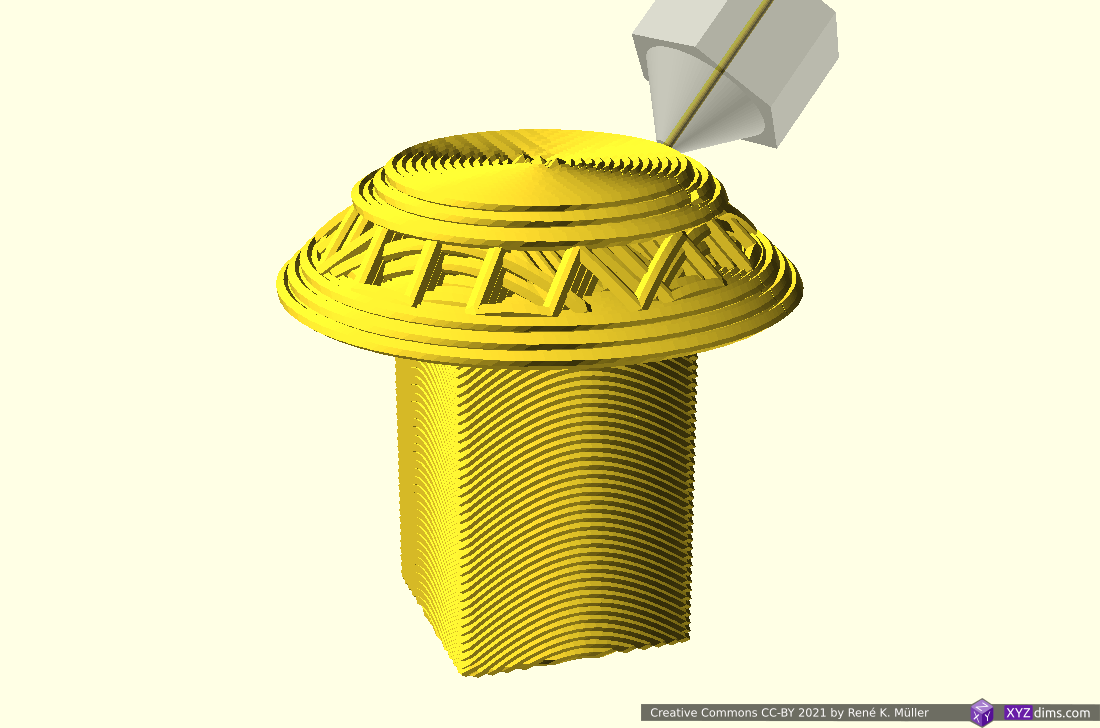
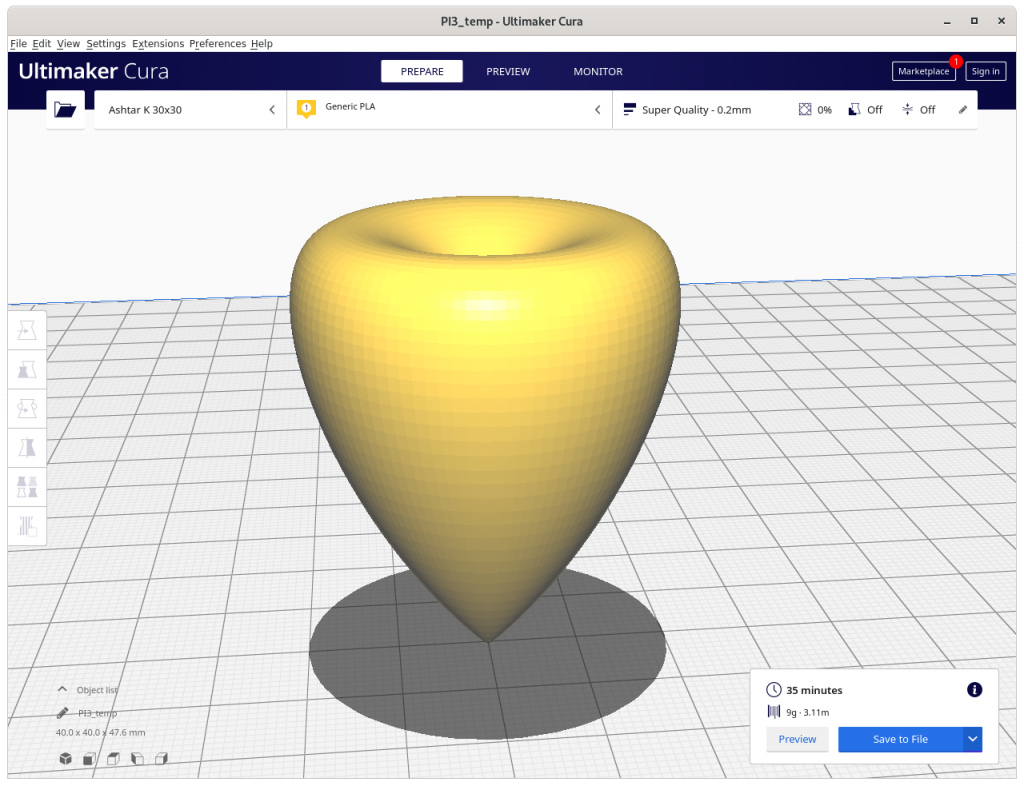
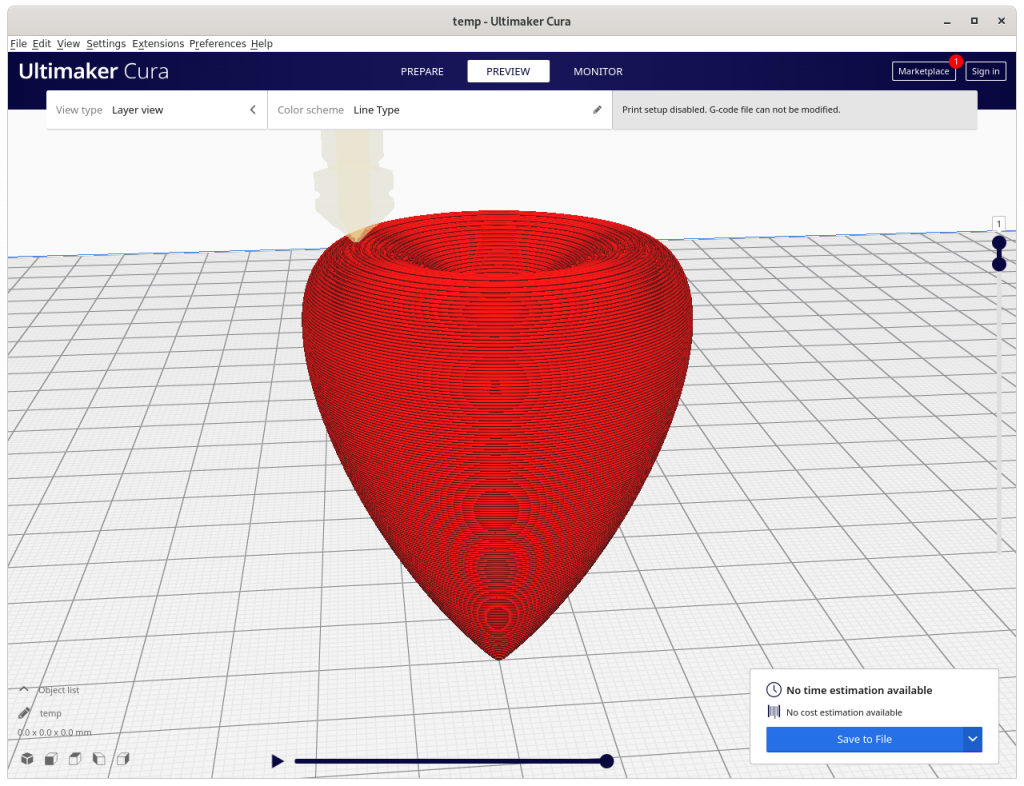
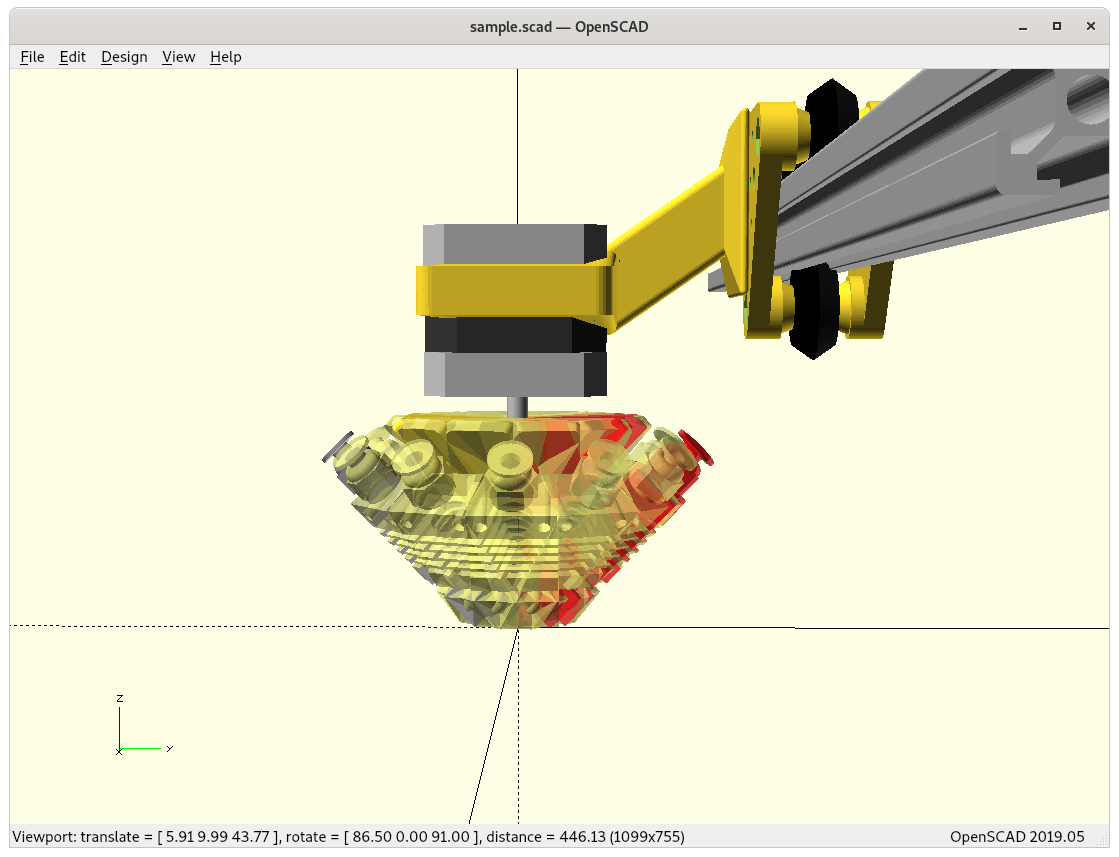
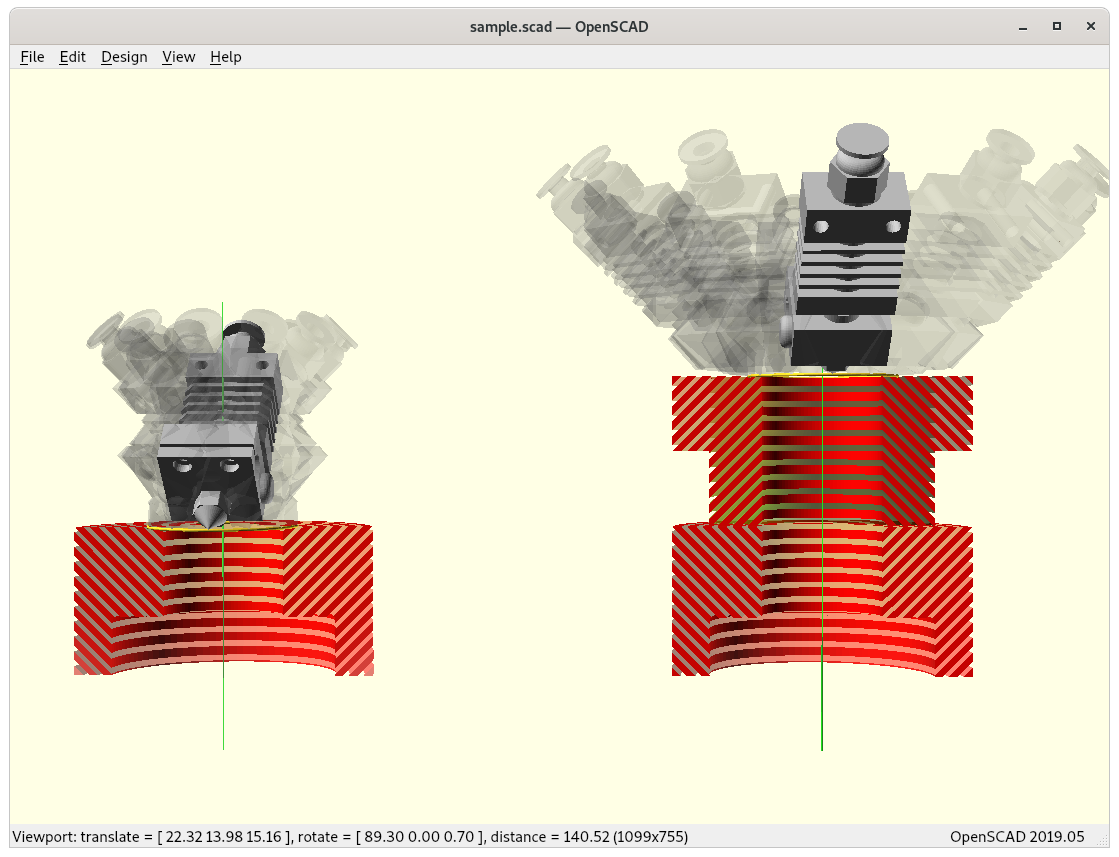
Conic sliced, in this case 45° conic angle, model nr 6 (table-like), with 45° tilted nozzle (simulation, animation)
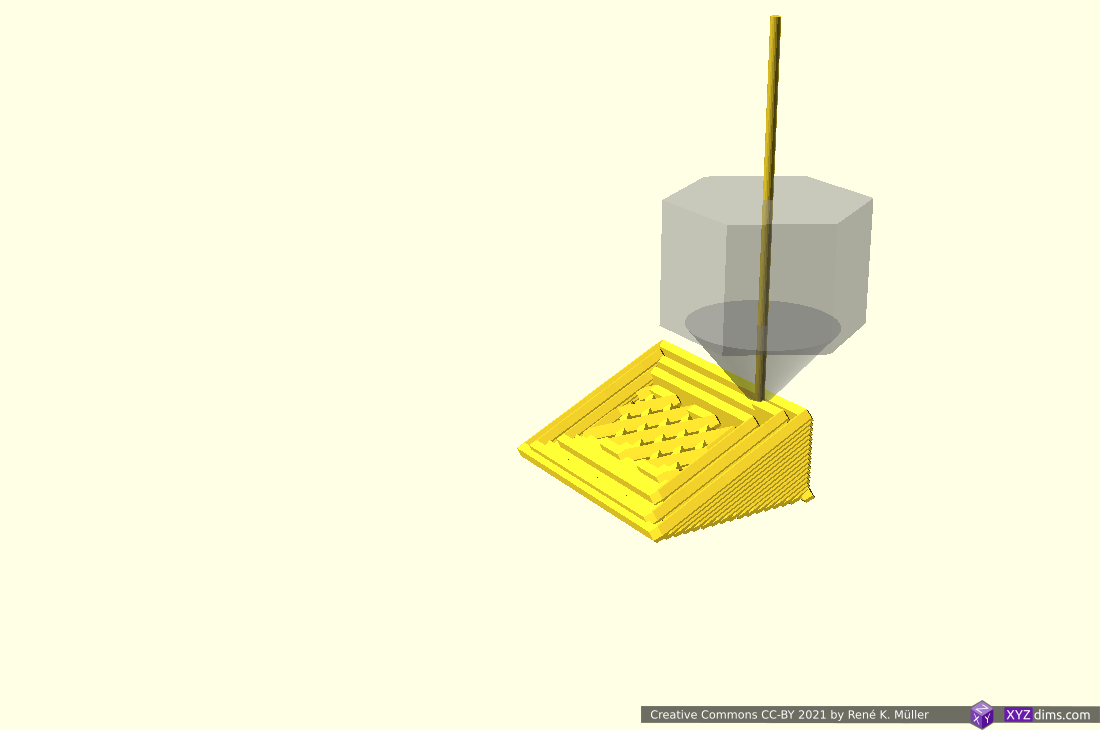
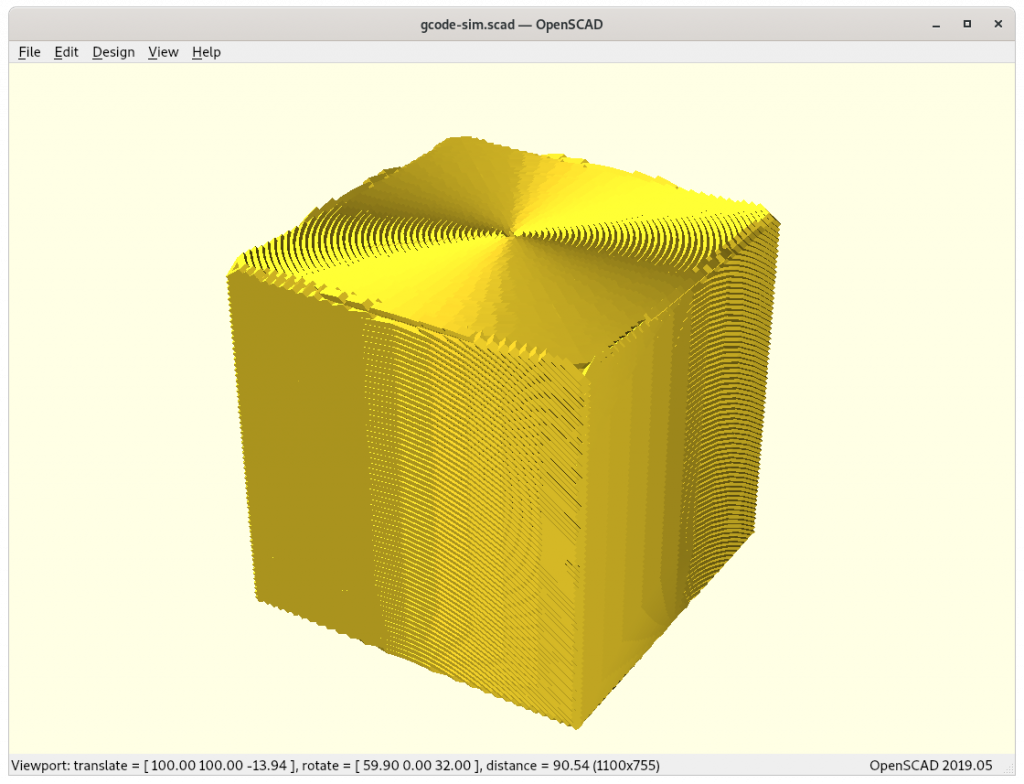
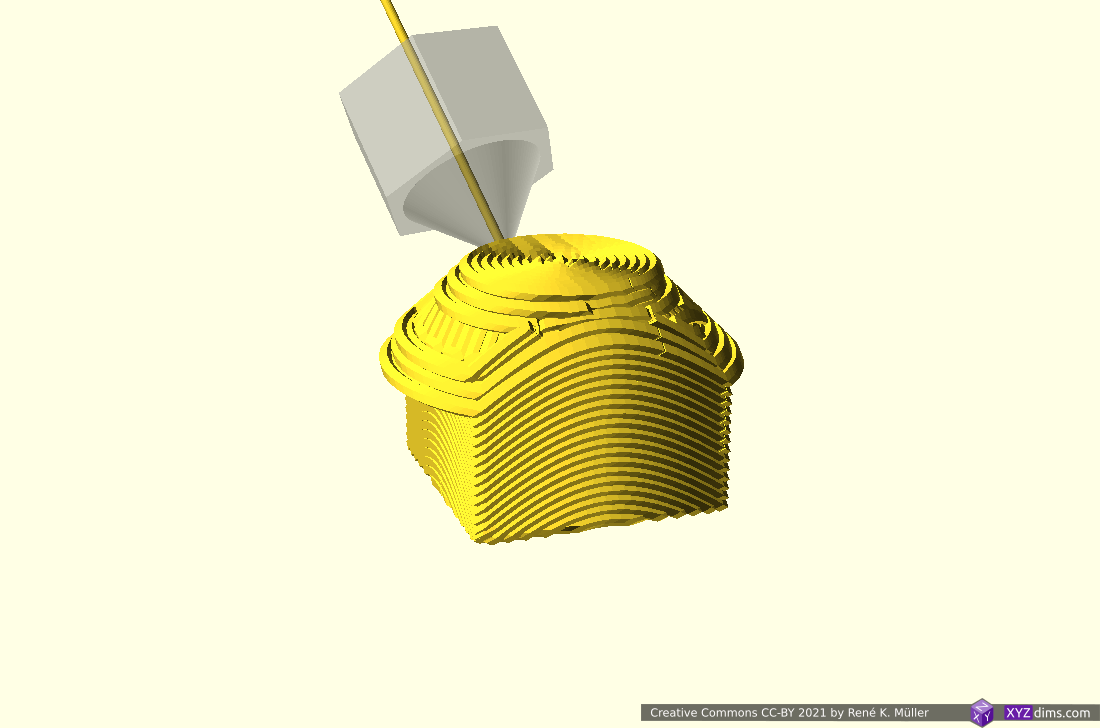
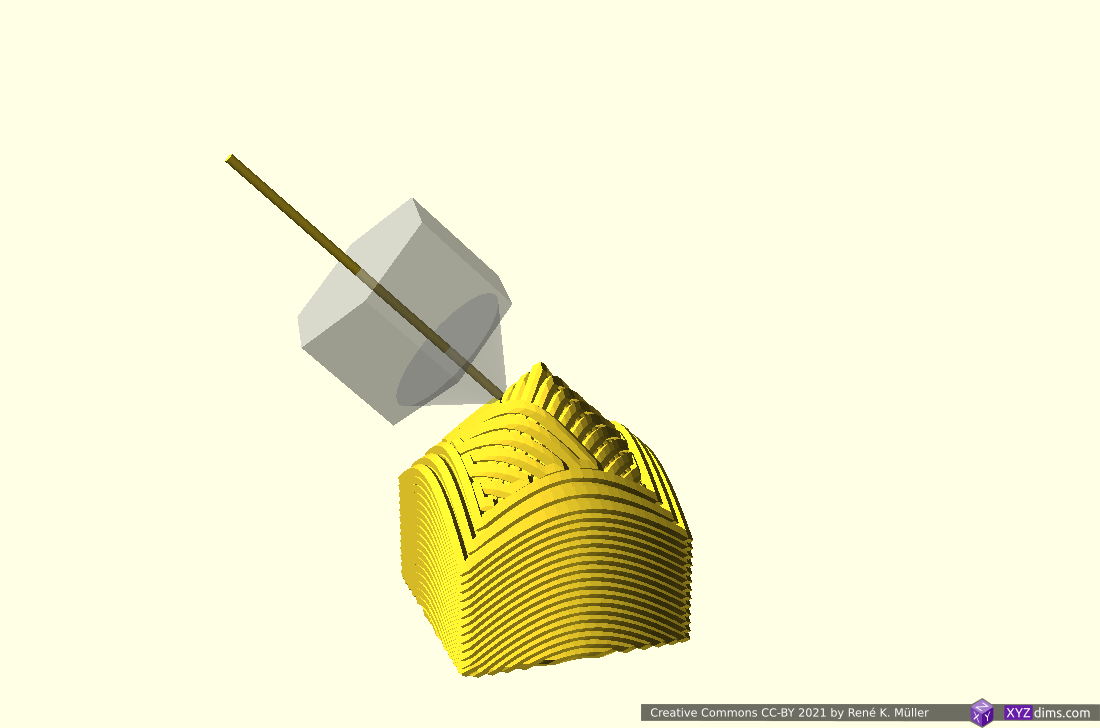
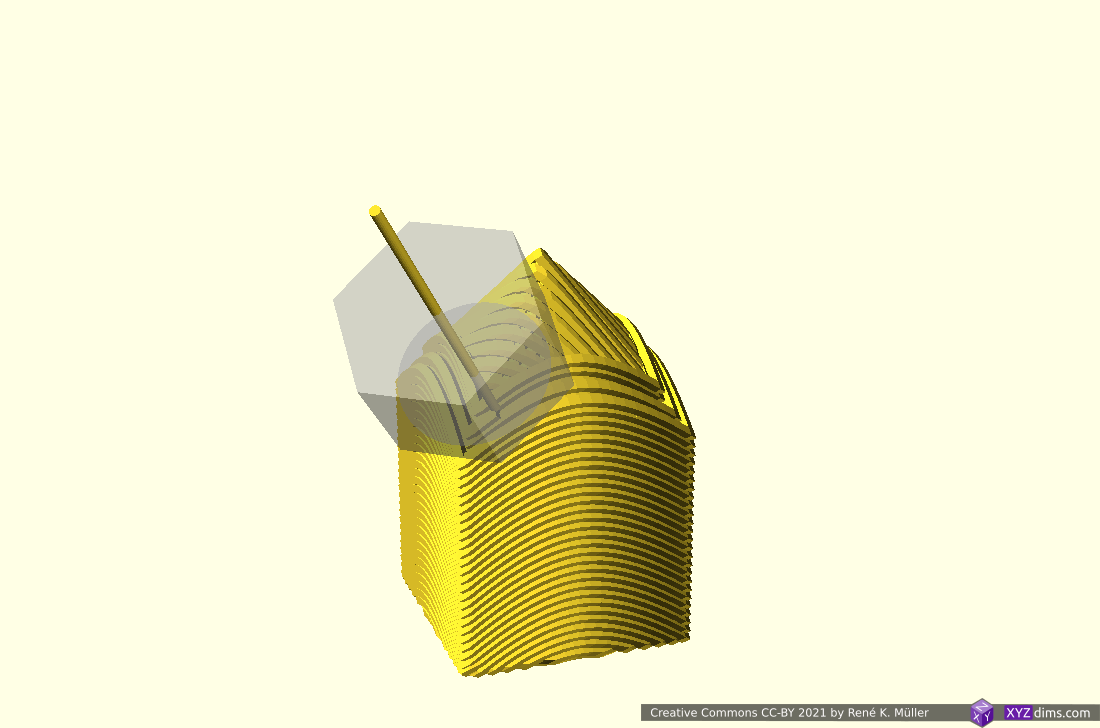
Conic Sliced on 3-axis
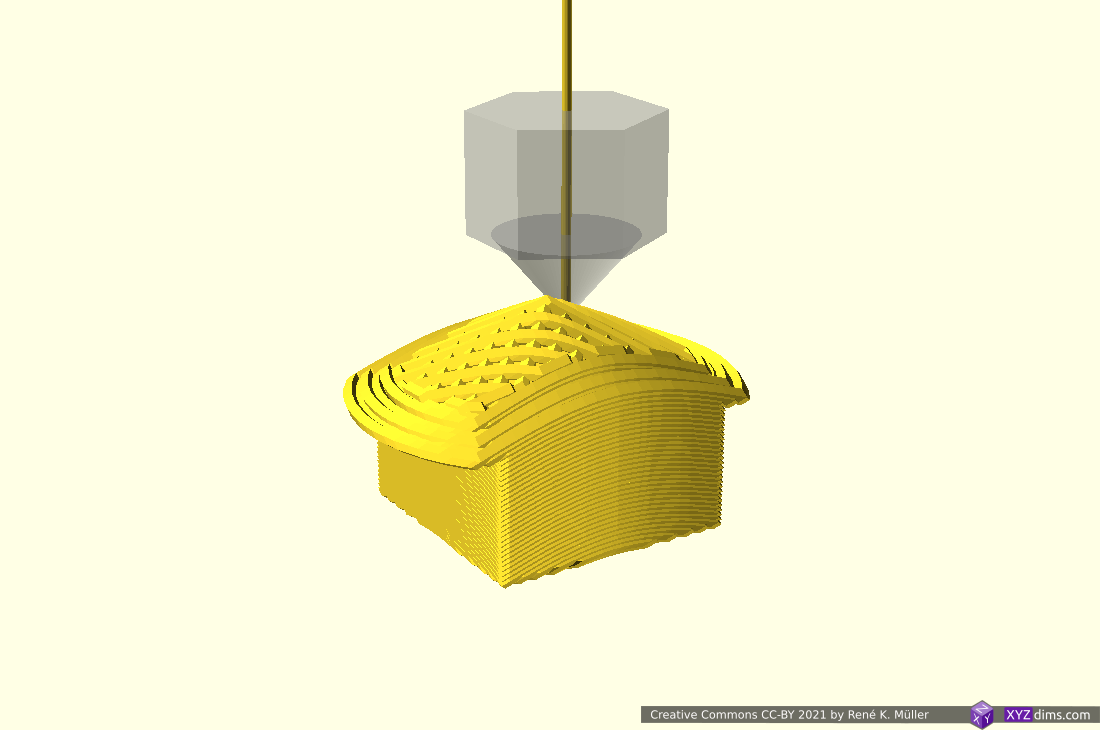
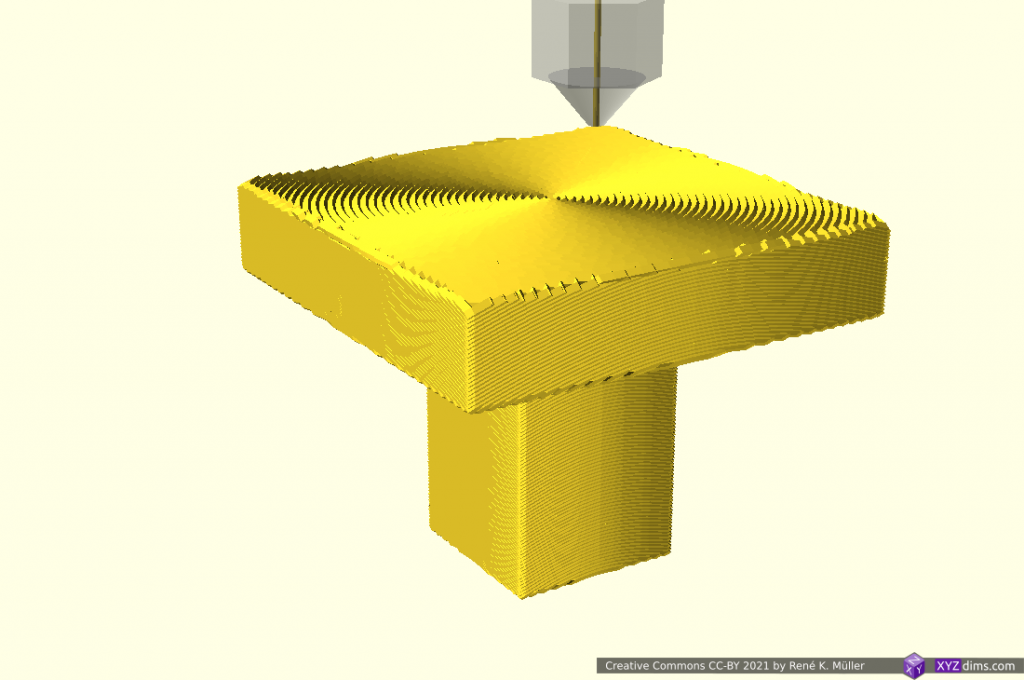
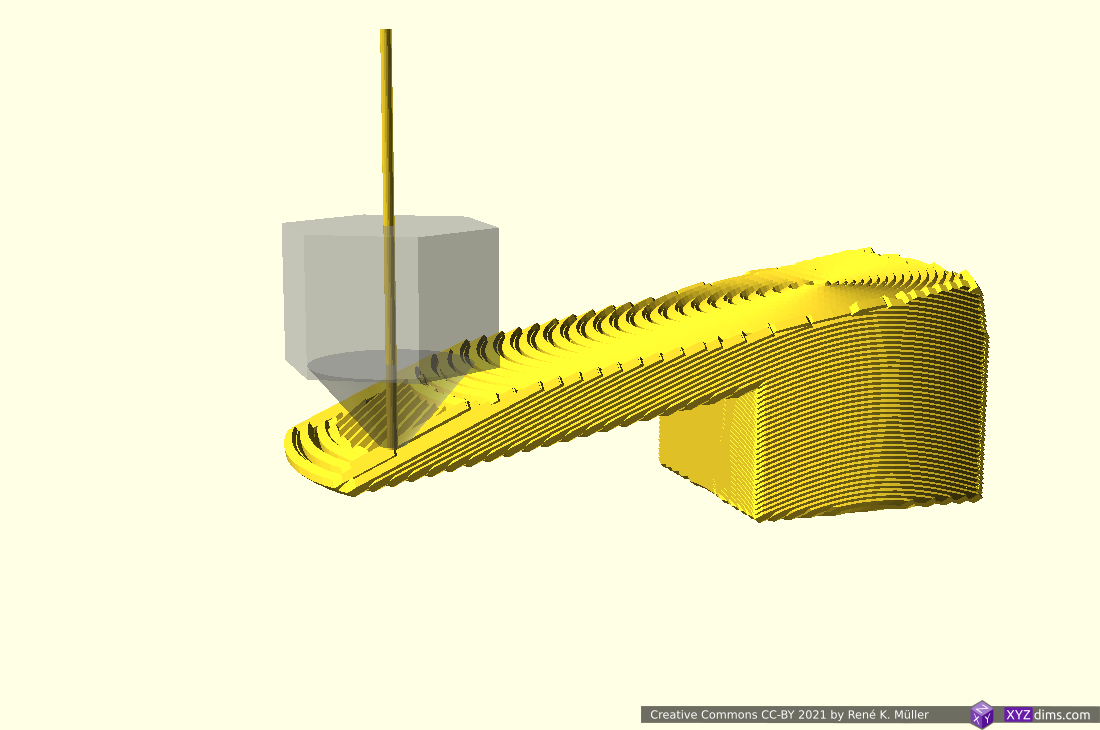
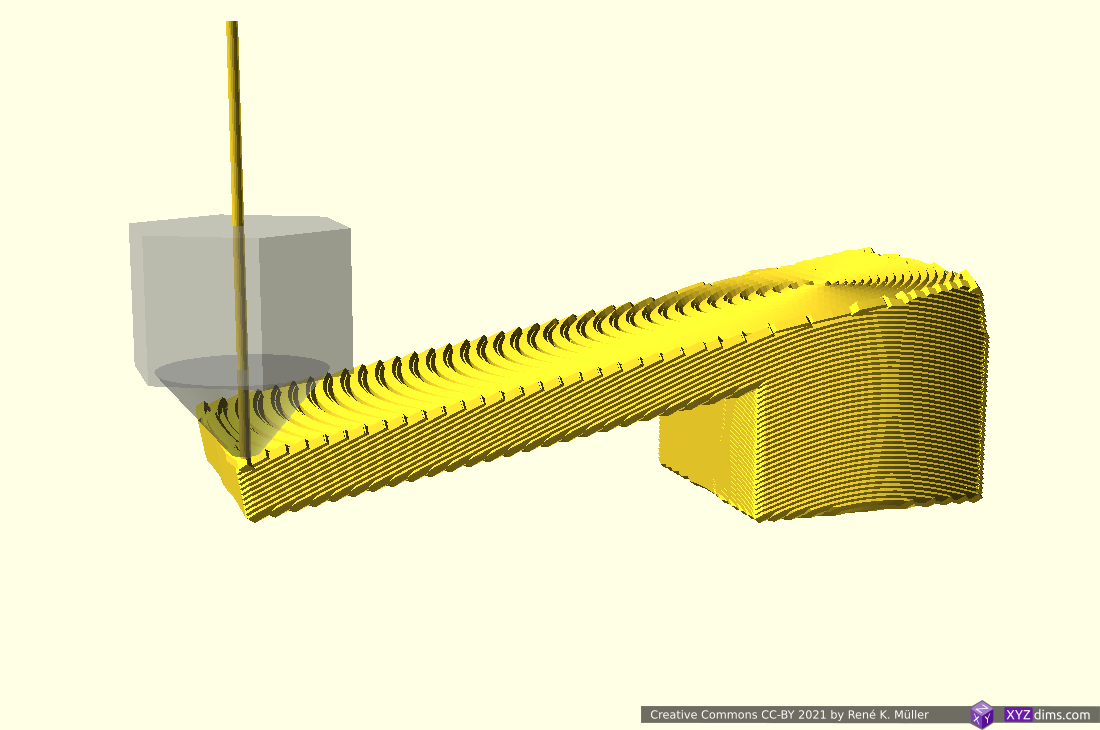
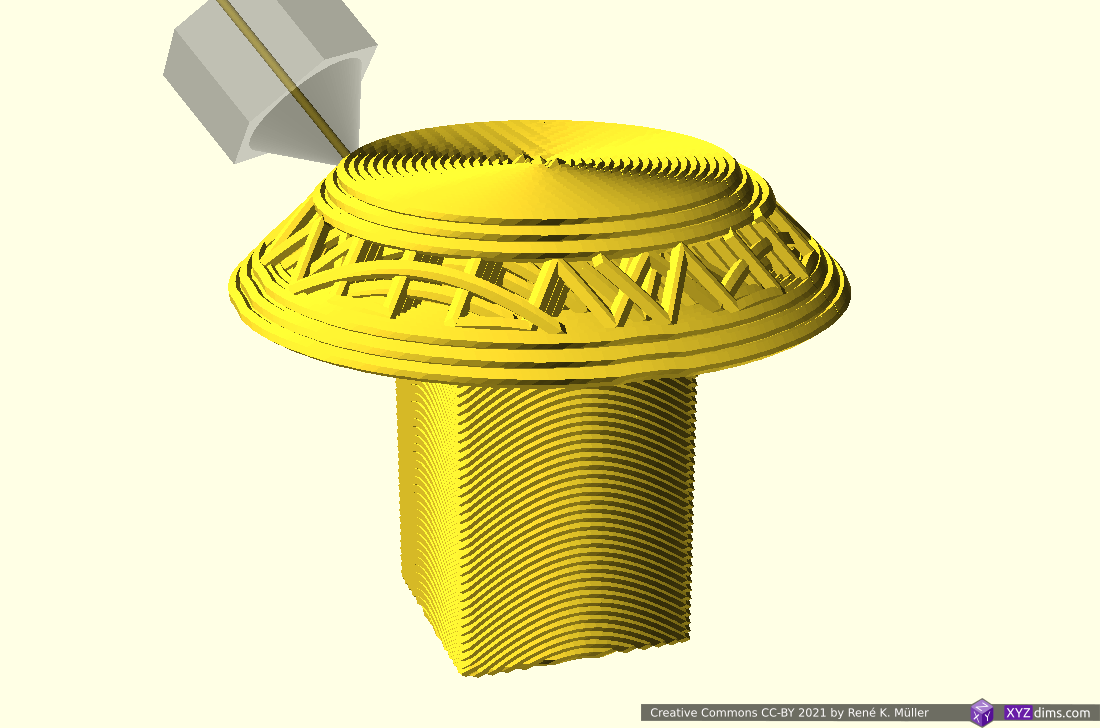
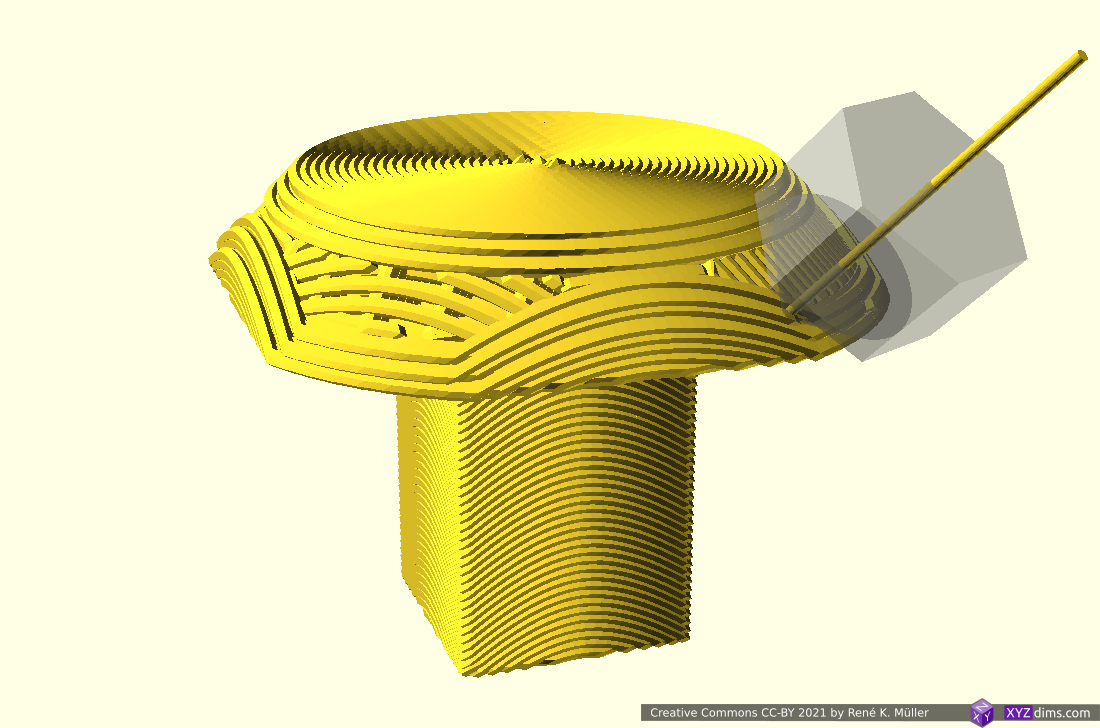
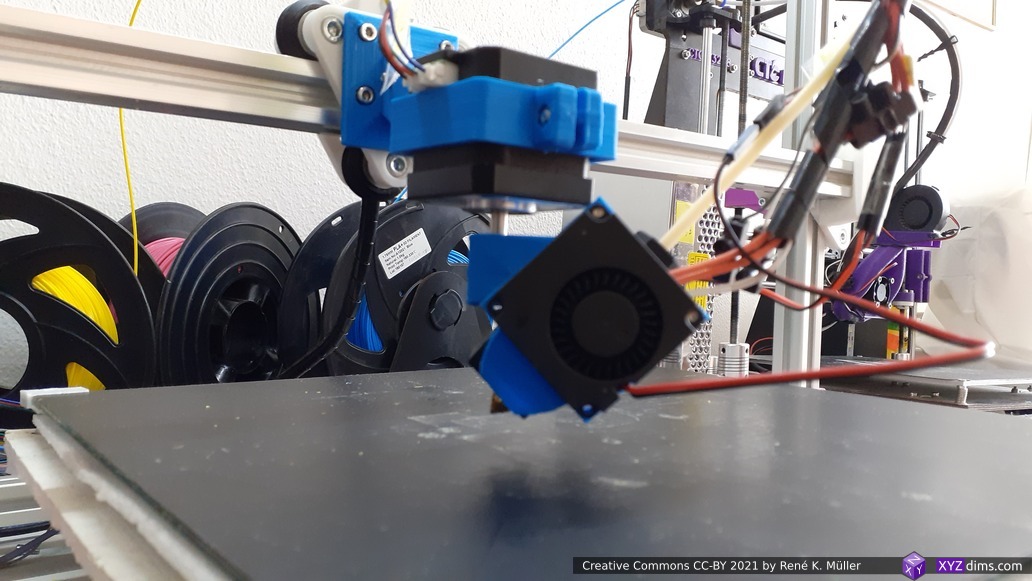
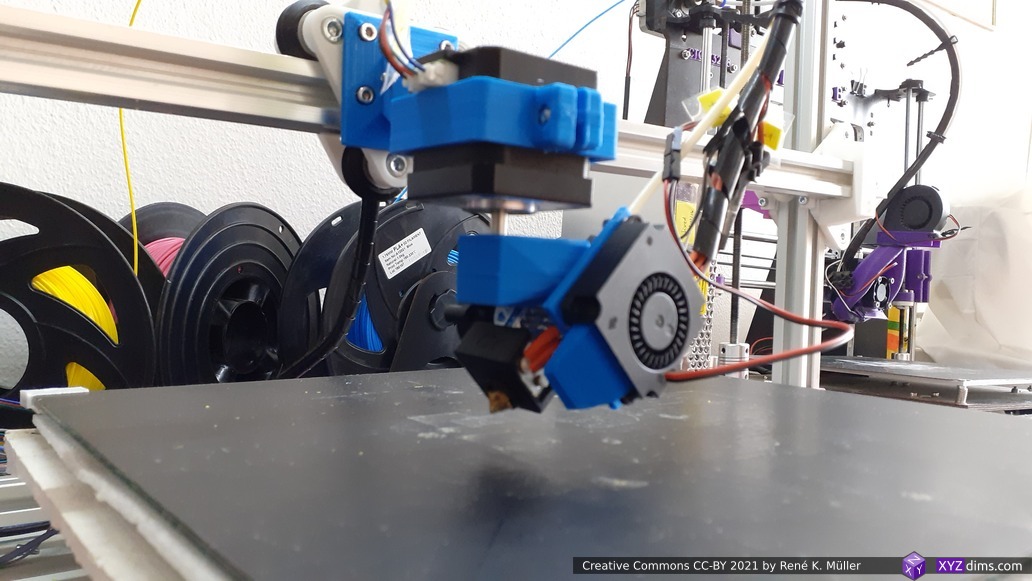
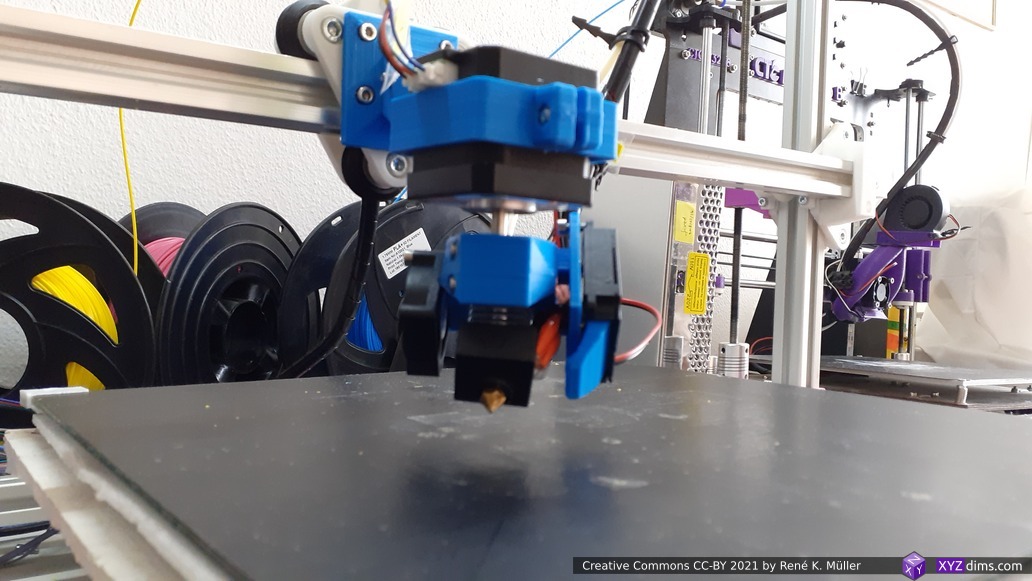
3-axis vertical nozzle printing 25° cone sliced model: overhangs in all directions without support
3-axis with vertical nozzle
3-axis with vertical nozzle
A well tuned and well designed part-cooler is prerequisite to print conic-sliced models at cone angle of 20-25°, and currently there is no conic slicer which can properly segment sub-volumes yet (2021/03) to switch from horizontal- and conic-slicing (with two modes of outside/inside cone) where suitable.
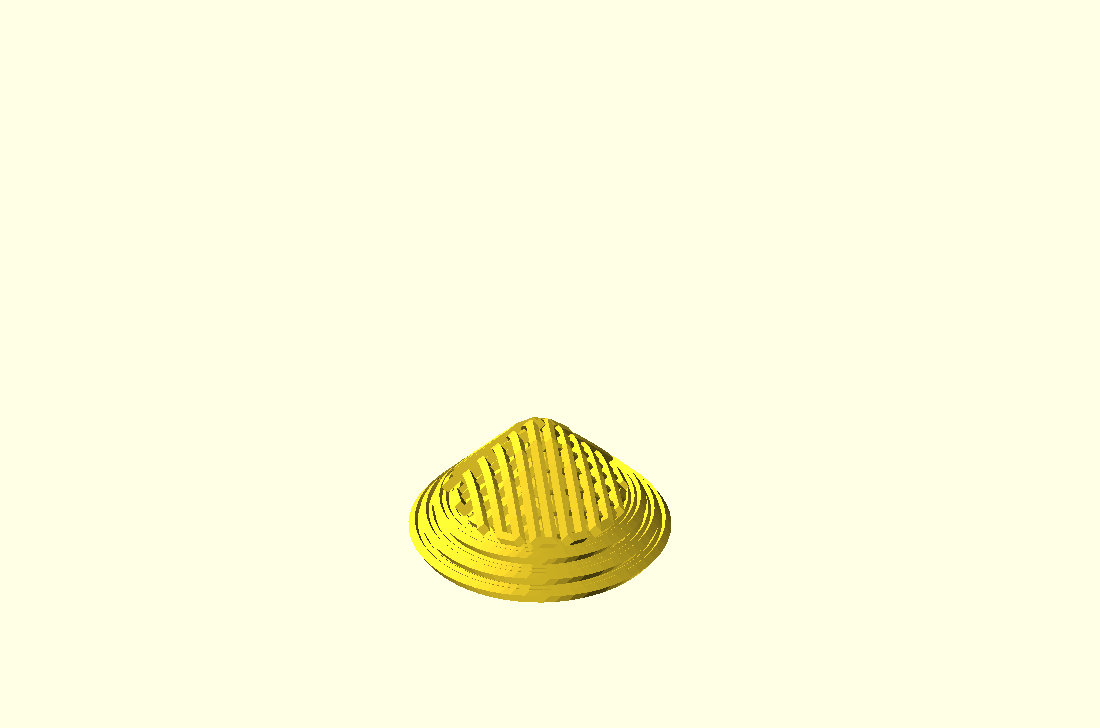
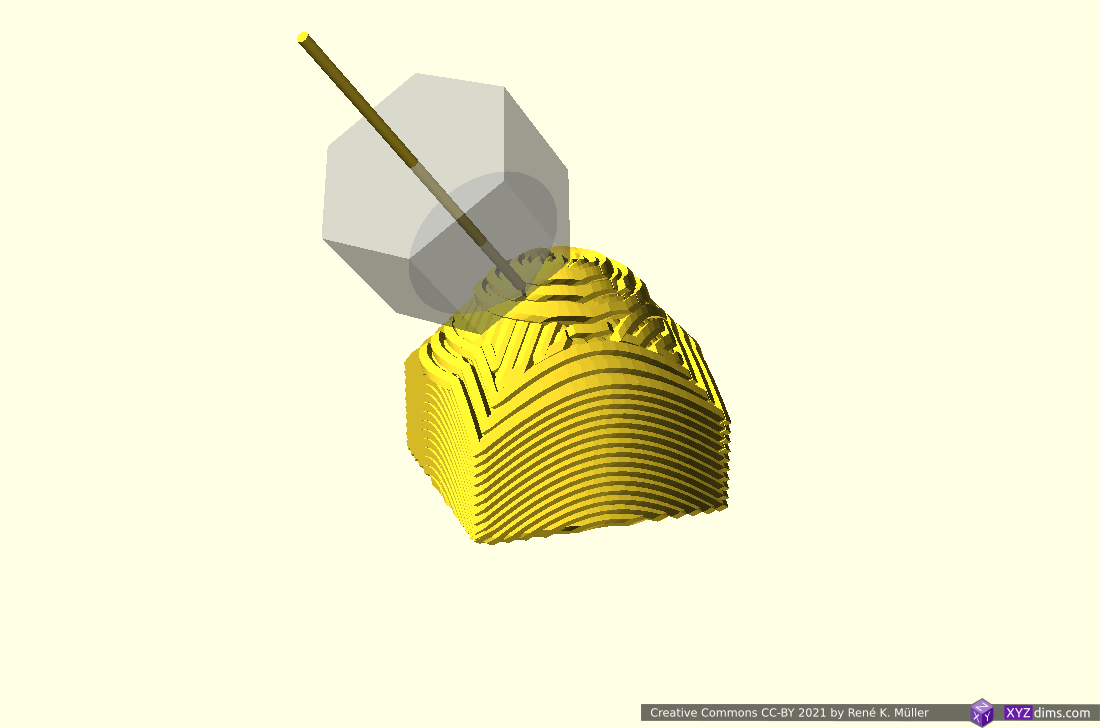
Conic Sliced on 4-axis RTN
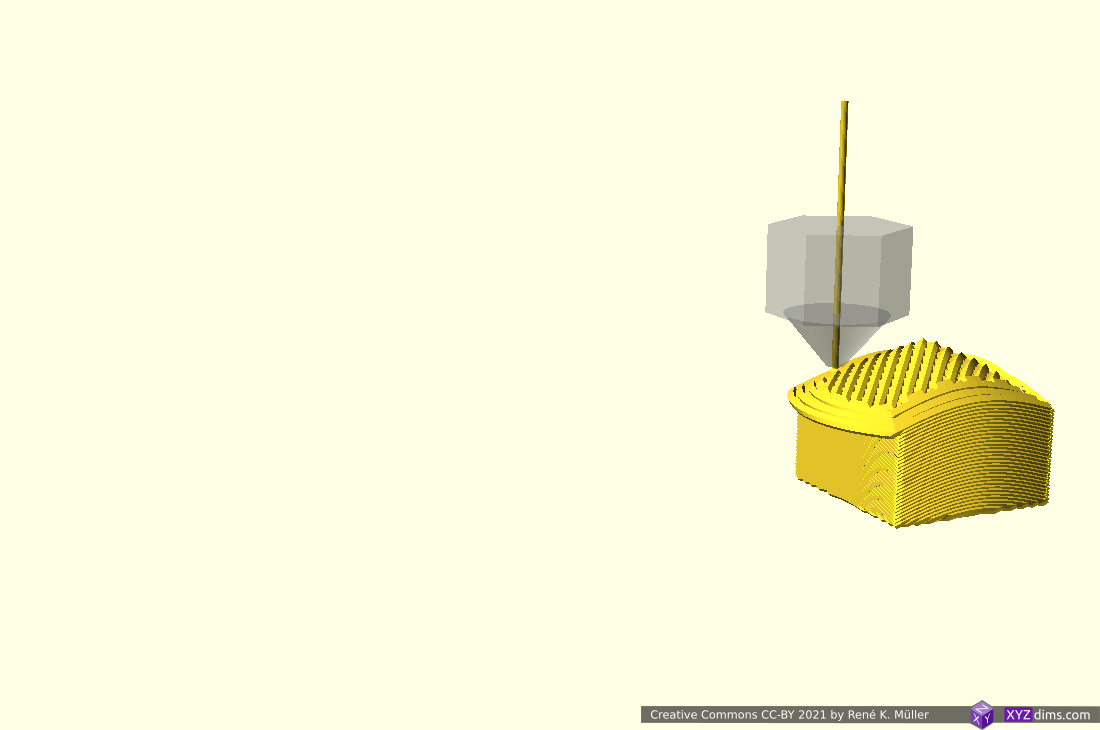
4-axis RTN printing 45° cone sliced model: overhangs in all directions without support
4-axis RTN printing 45° cone sliced model: overhangs in all directions without support
4-axis RTN printing 45° cone sliced model: overhangs in all directions without support
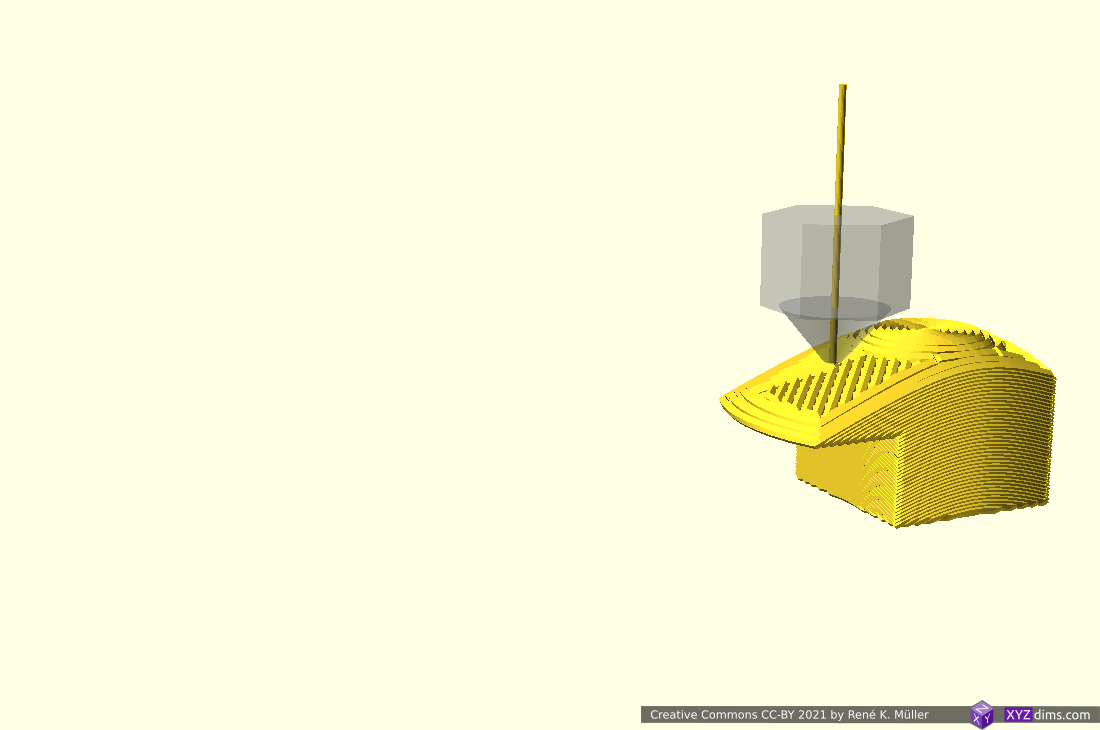
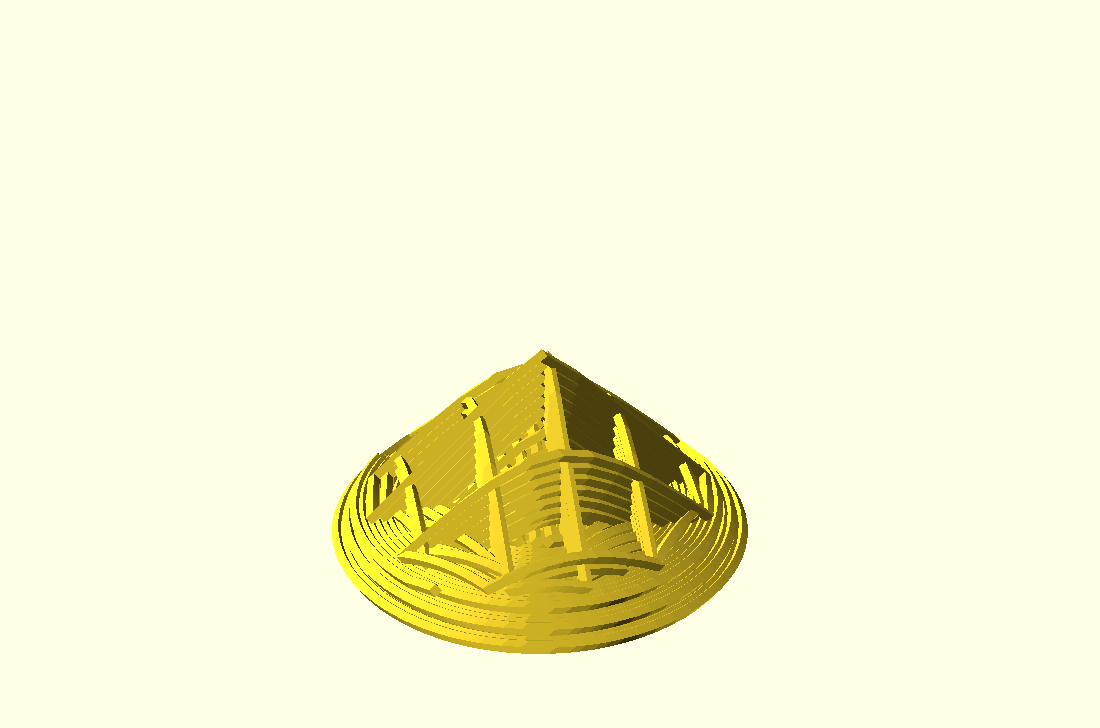
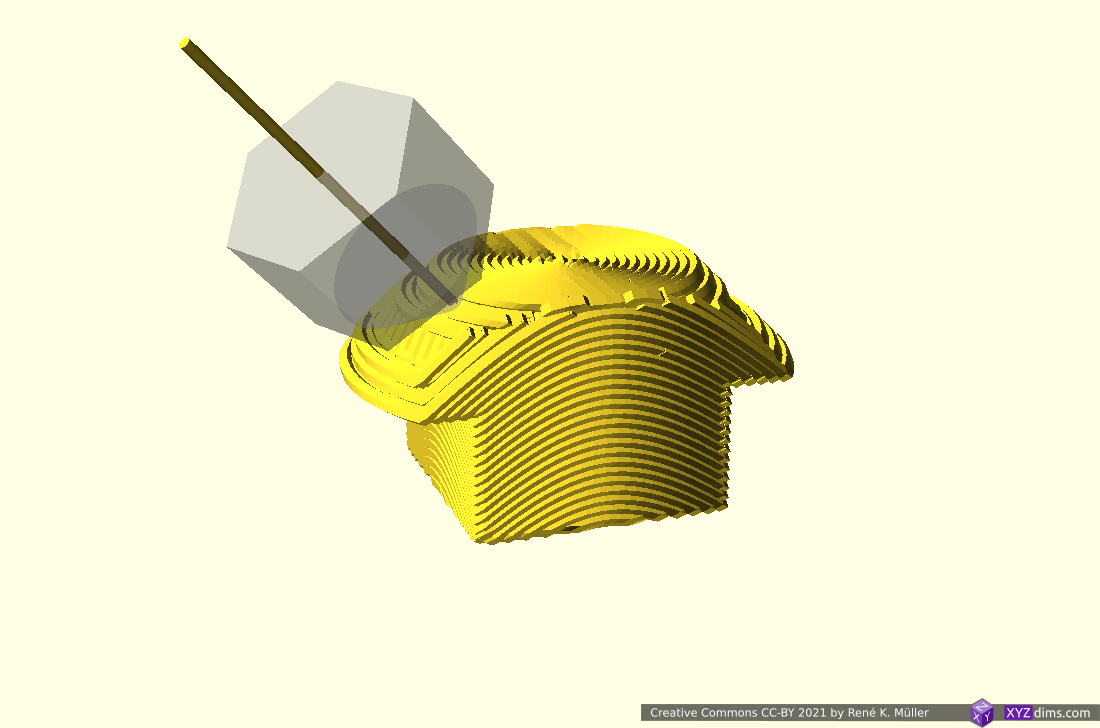
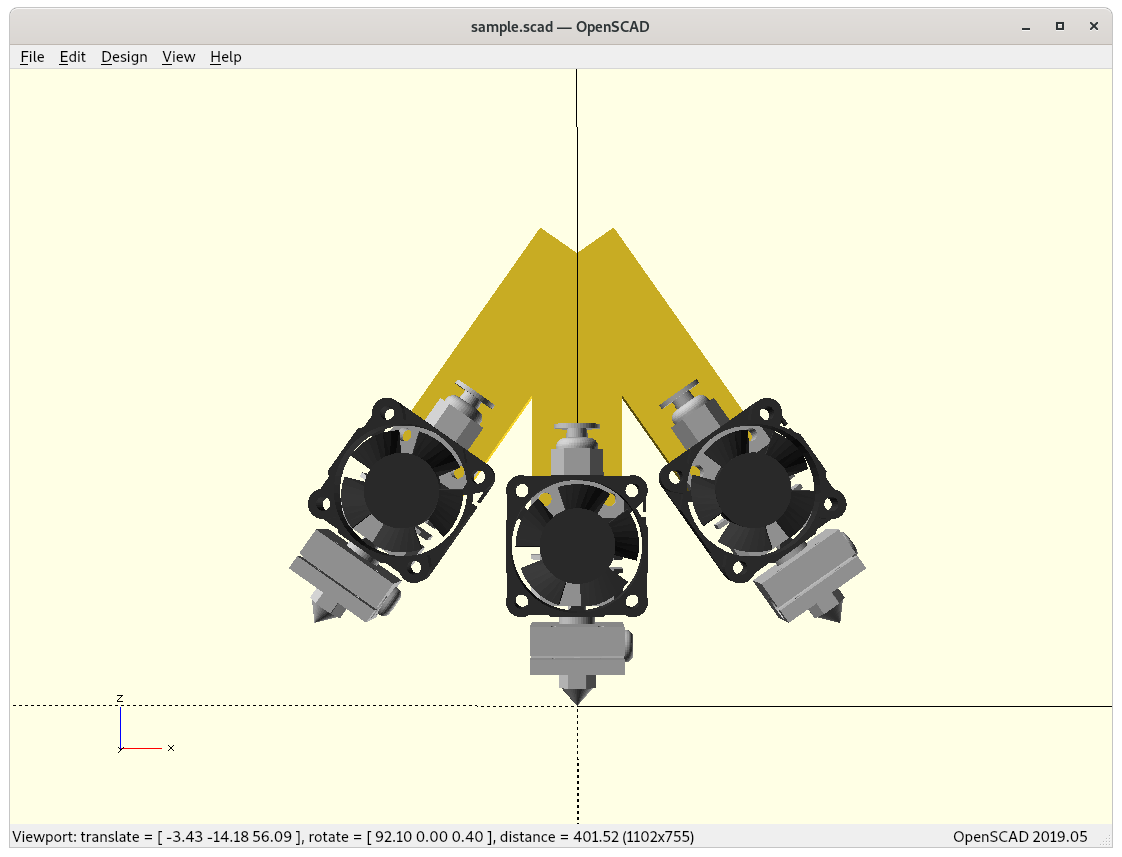
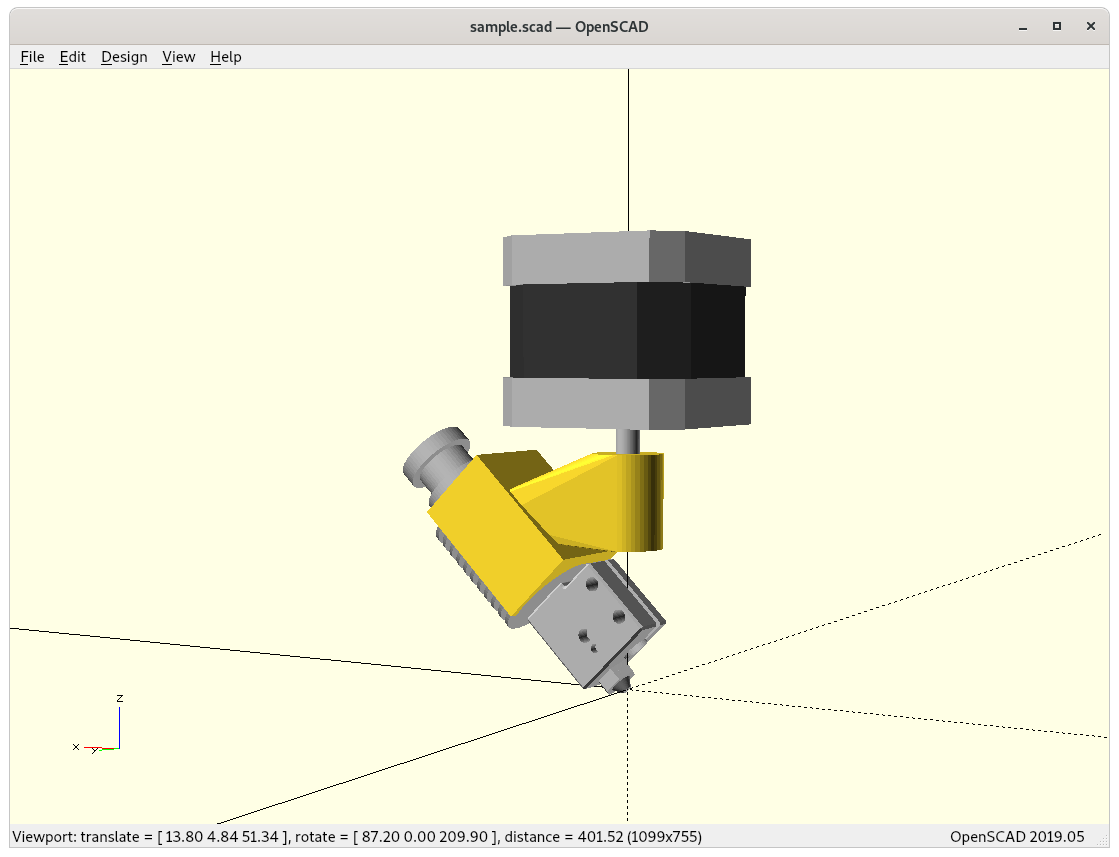
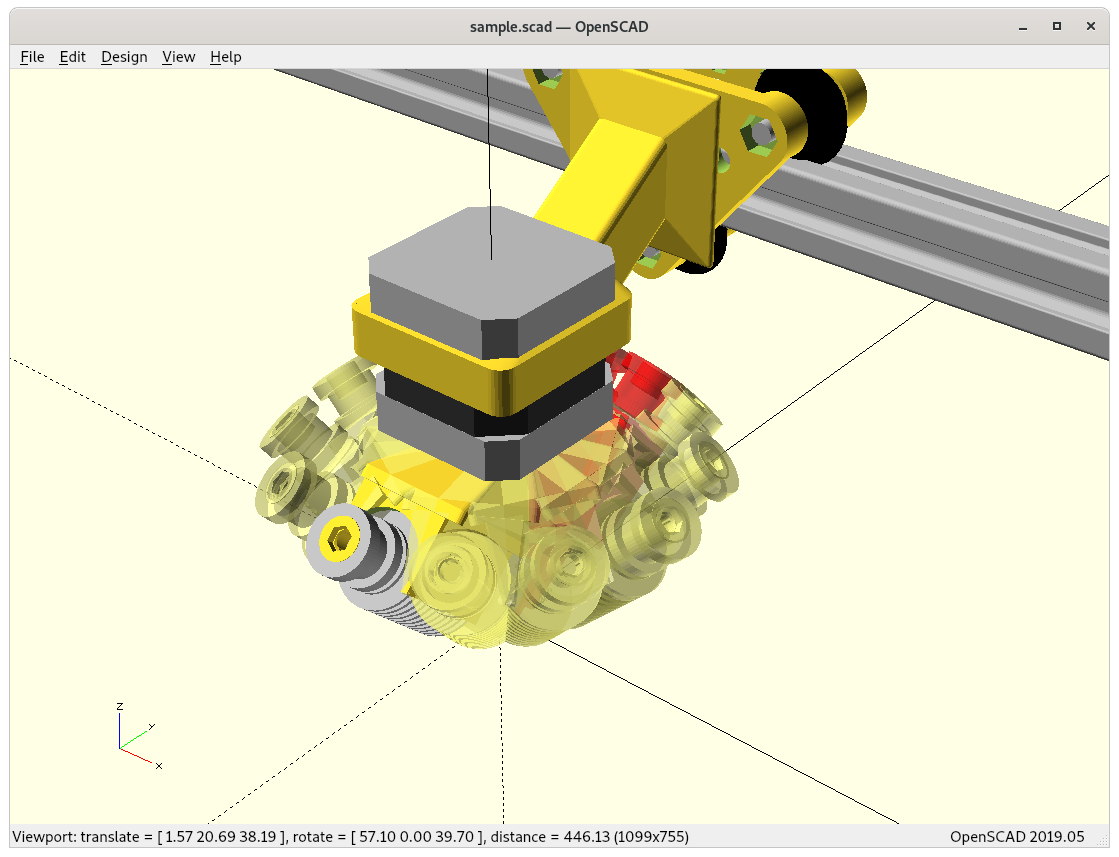
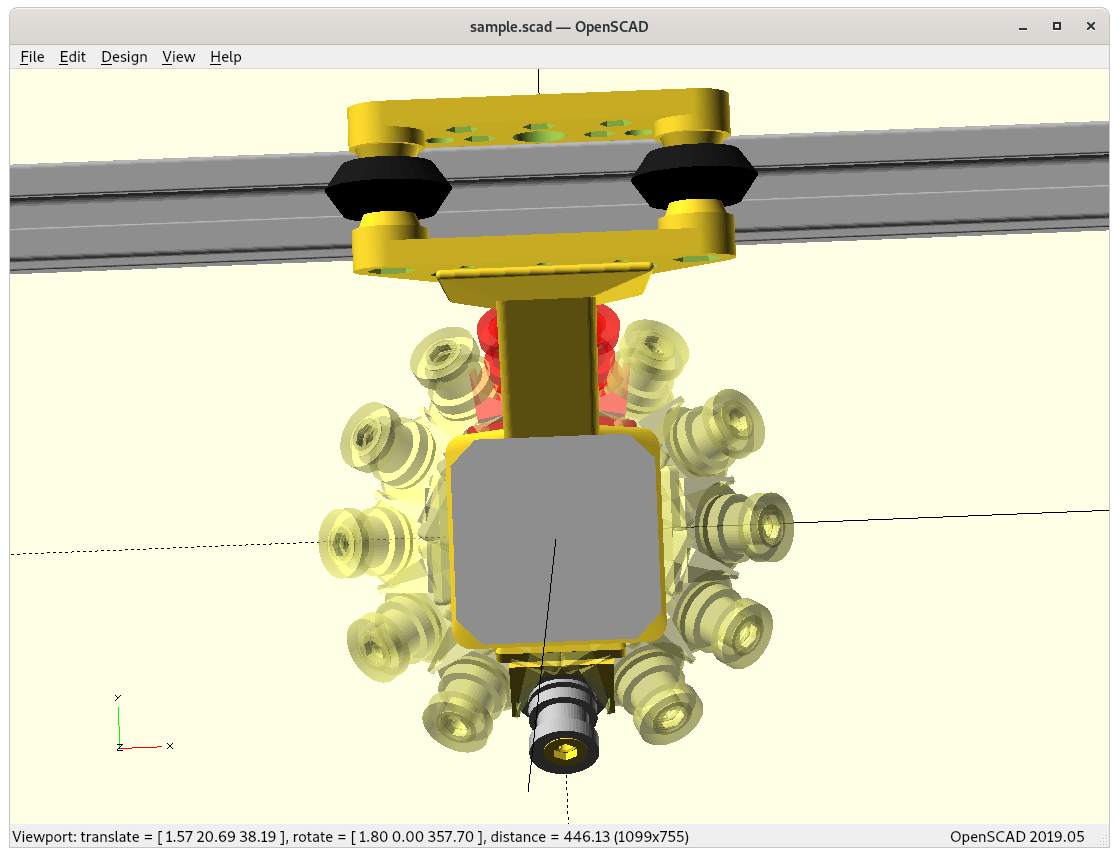
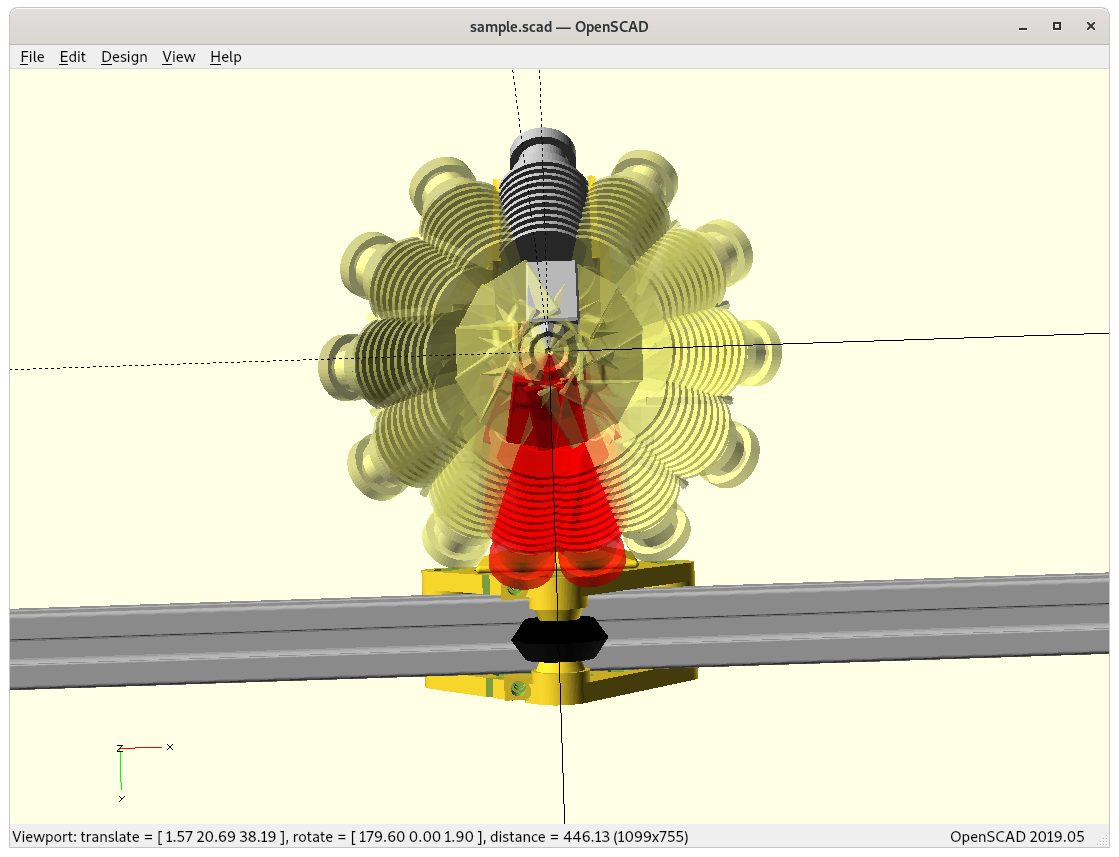
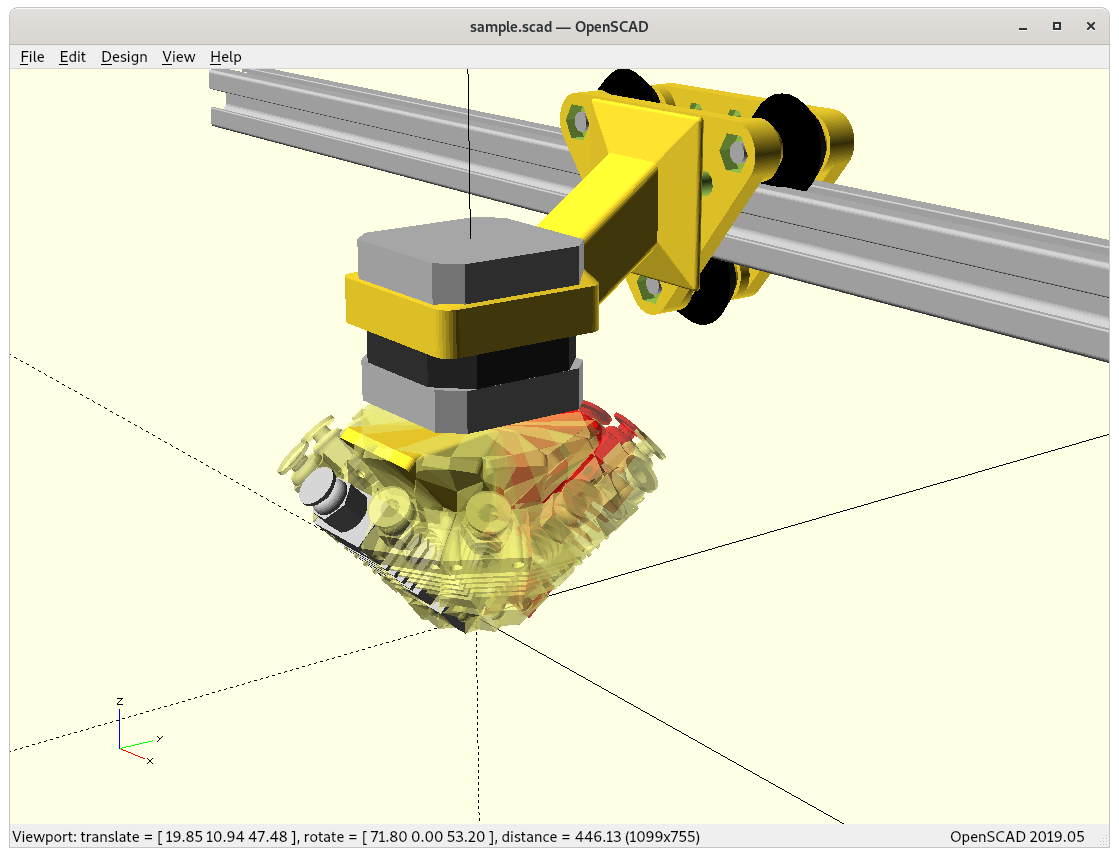
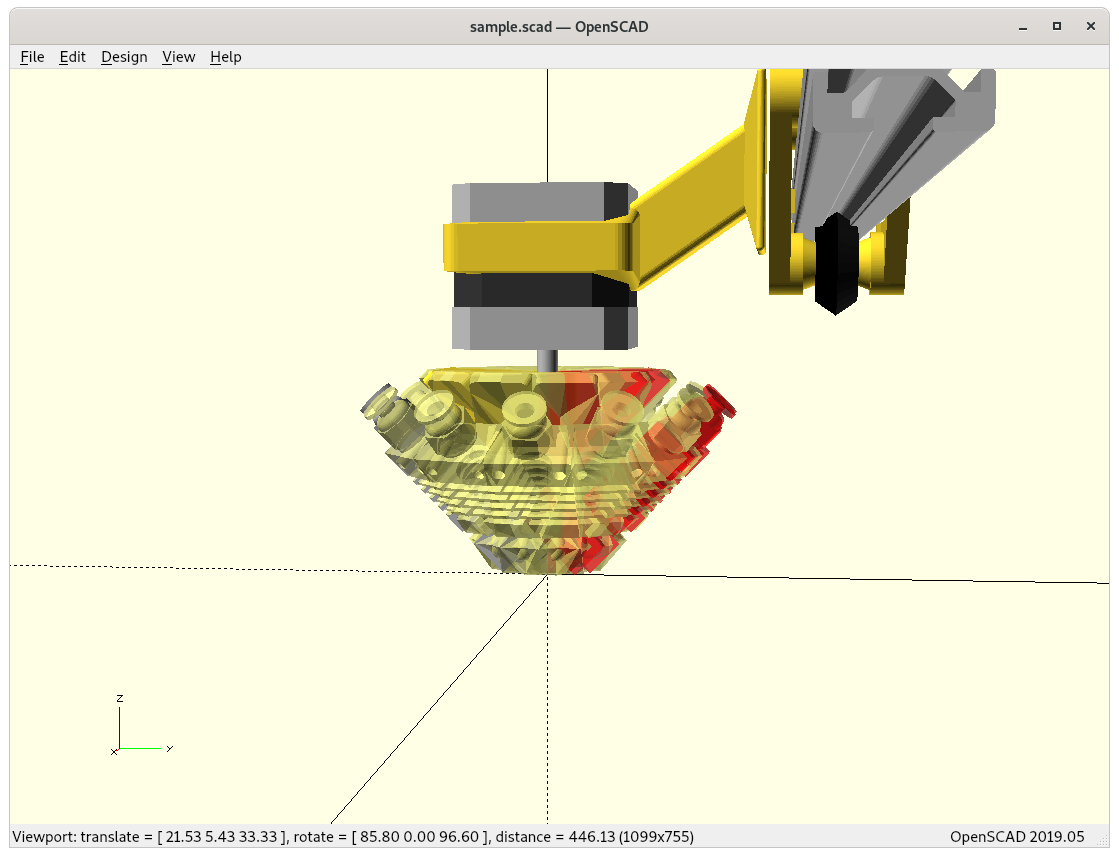
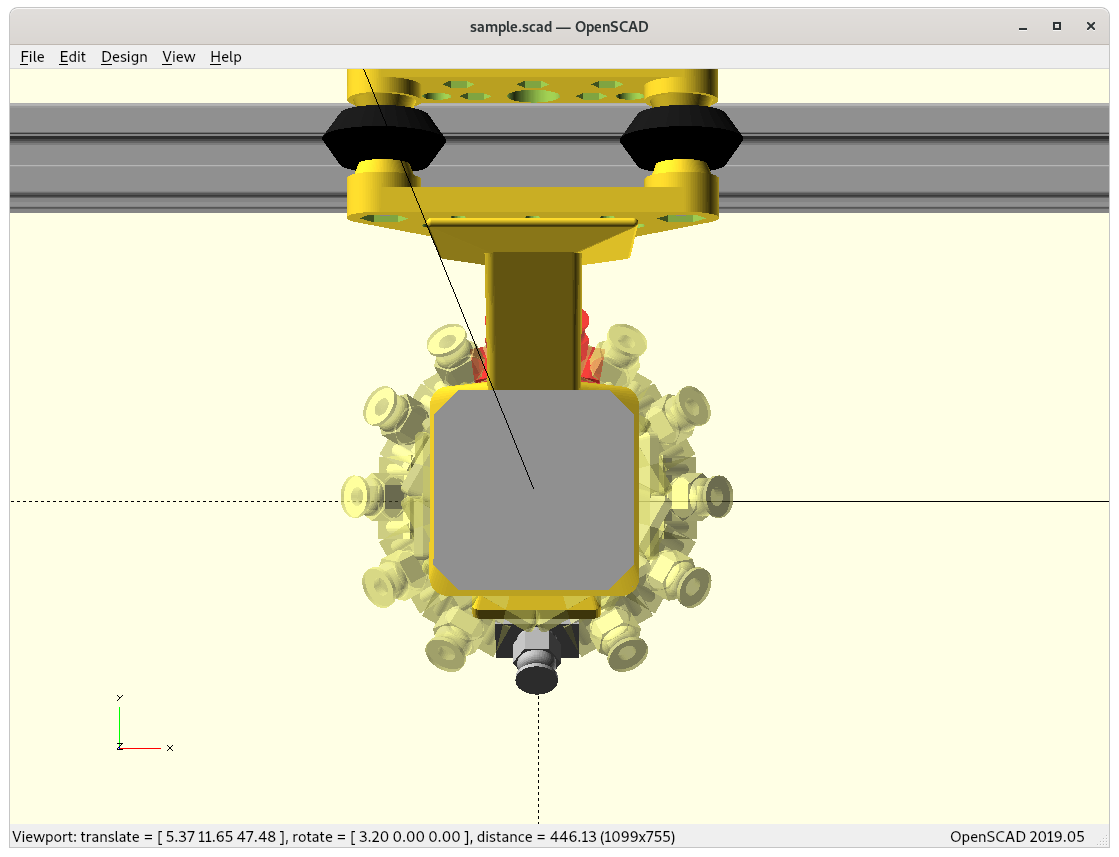
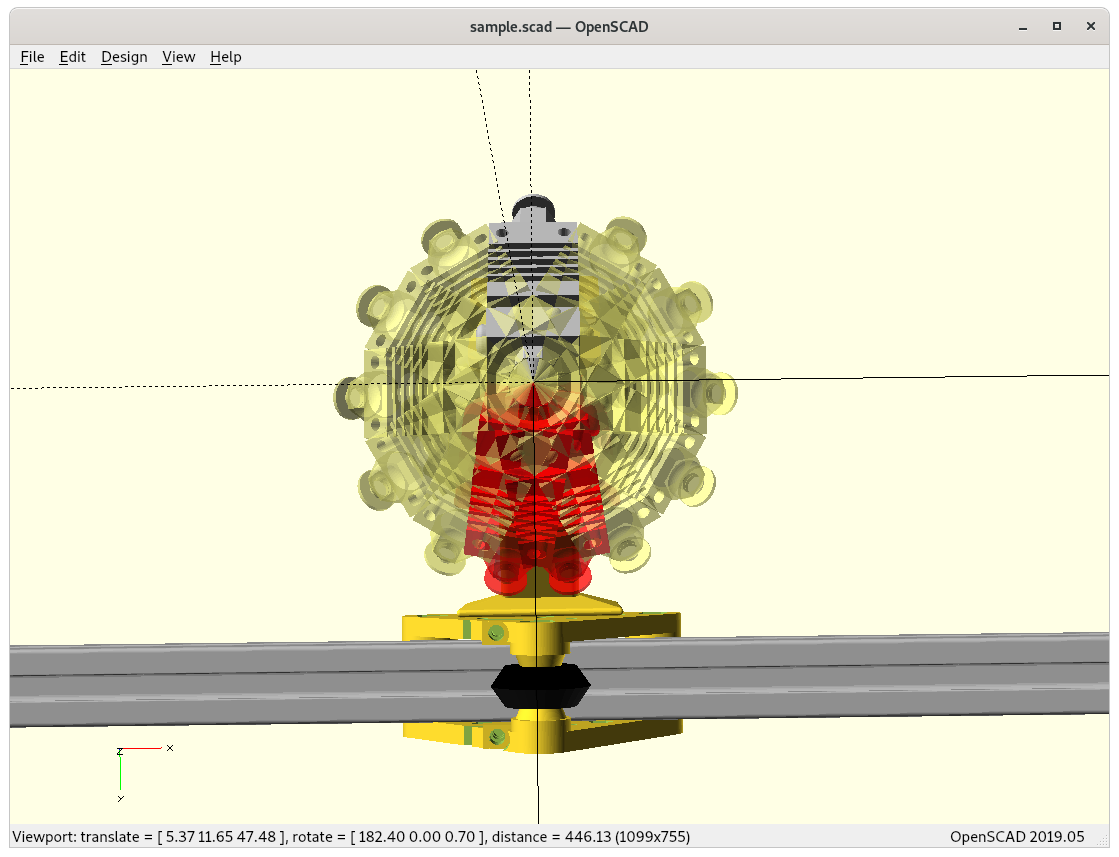
5-axis PAX printing 45° cone sliced model: overhangs in all directions without support
5-axis PAX printing 45° cone sliced model: overhangs in all directions without support
5-axis PAX printing 45° cone sliced model: overhangs in all directions without support
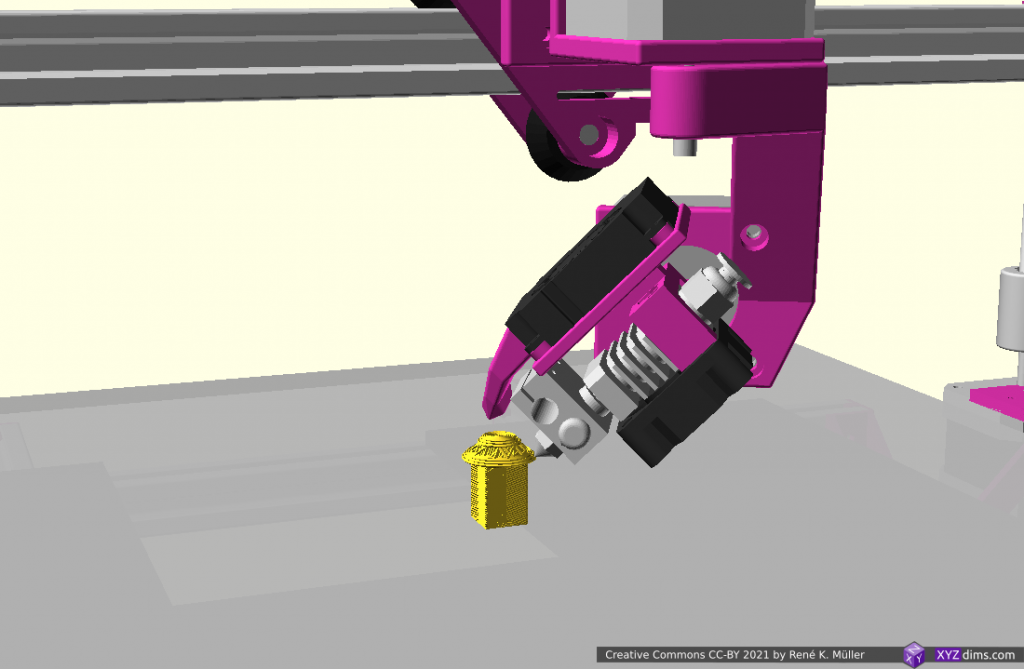
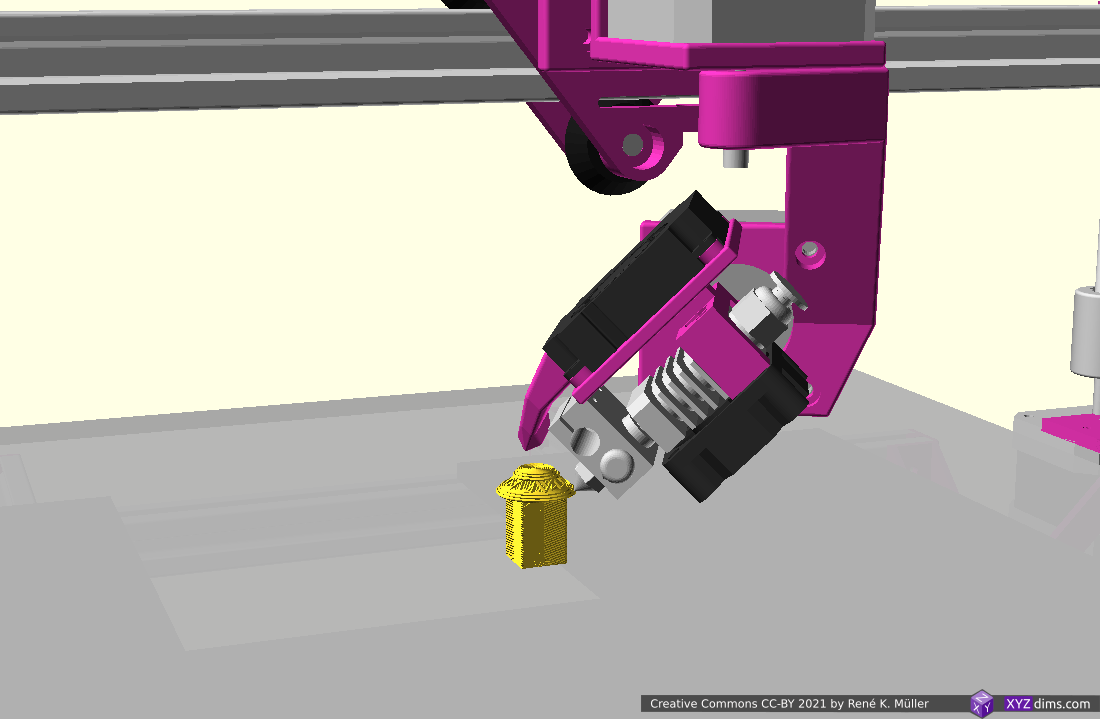
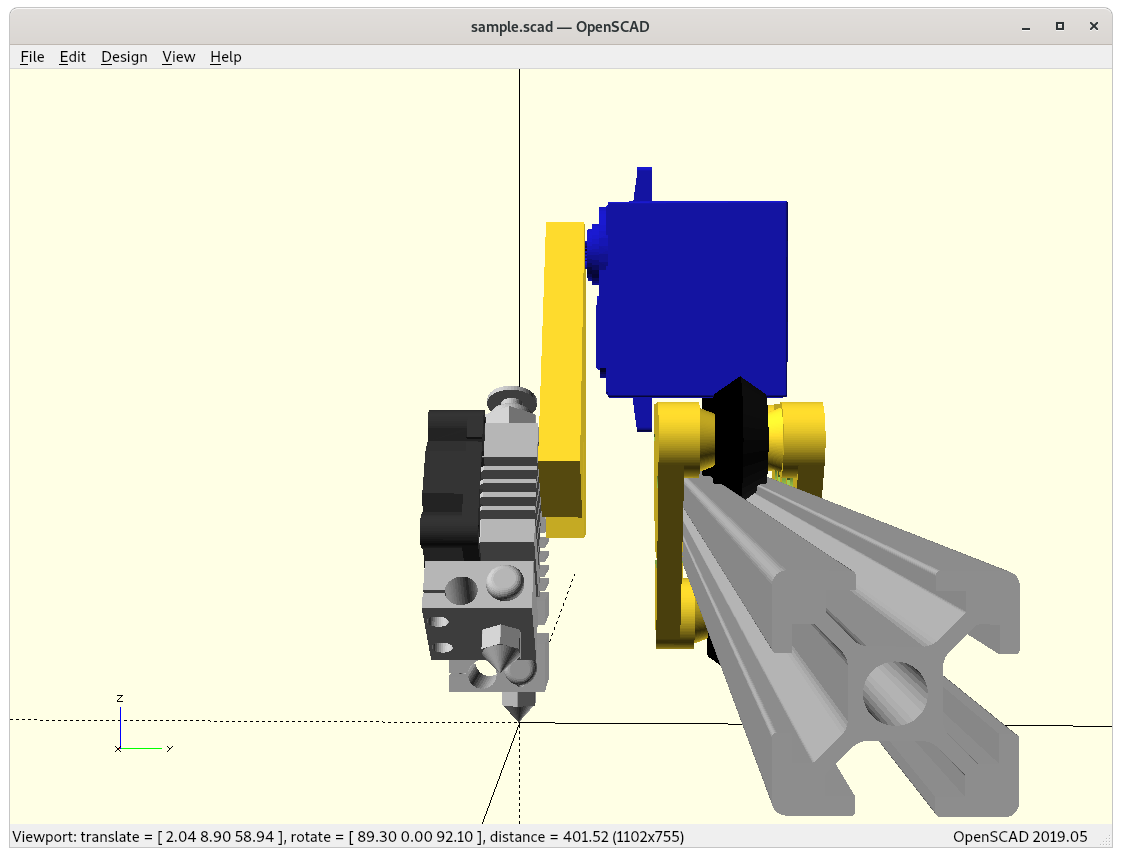
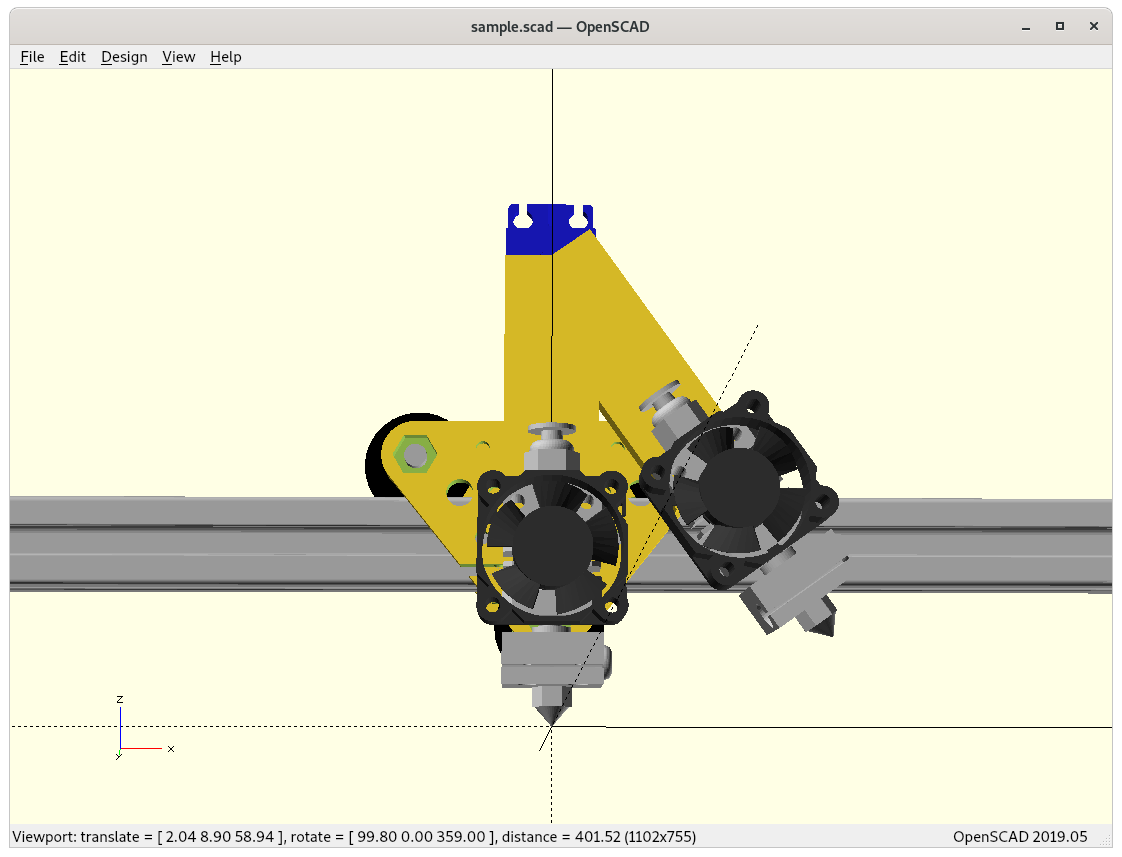
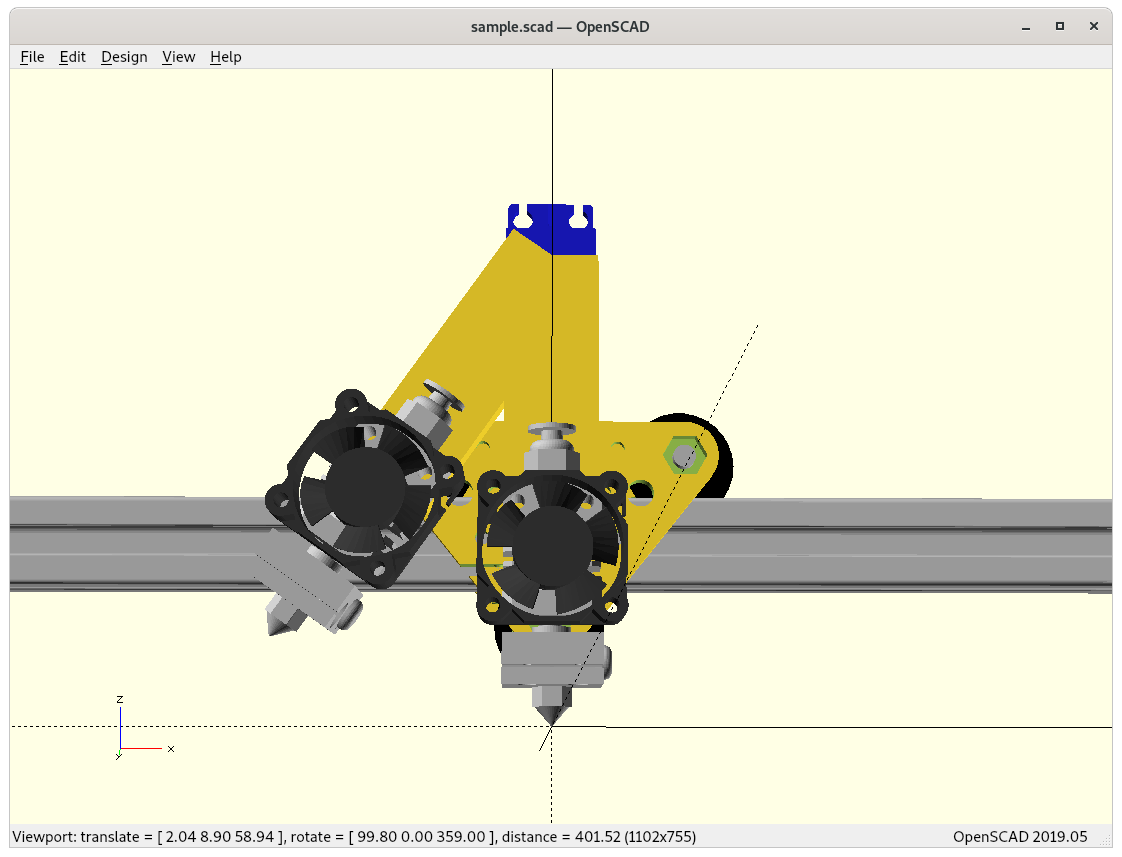
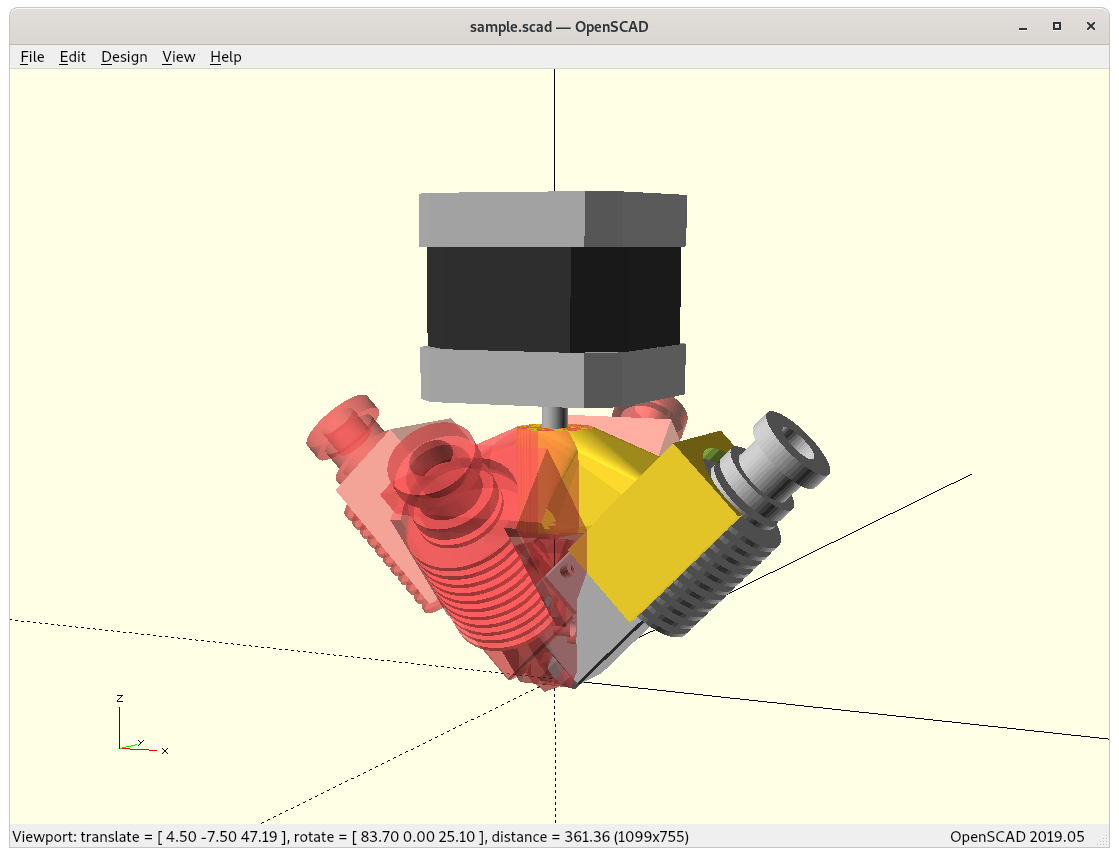
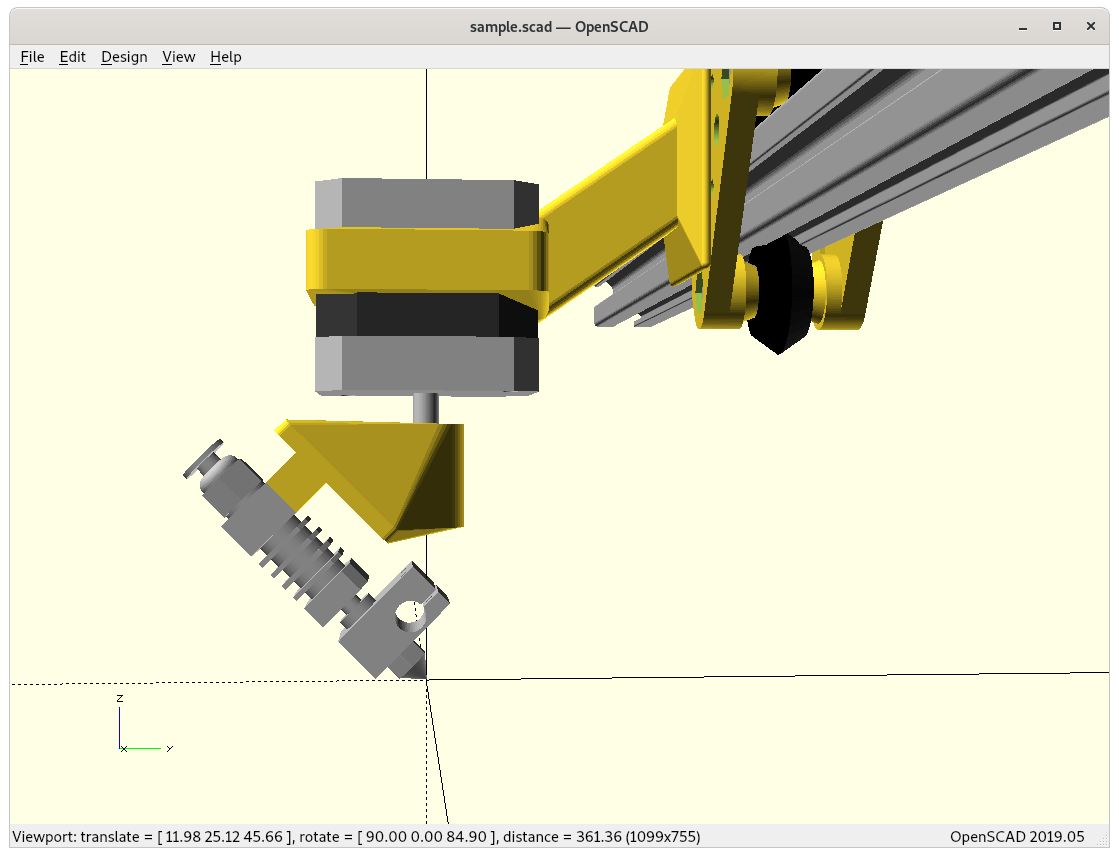
and nearly the same with PAX90 (tilt angle 0..90° only) with shorter arm:
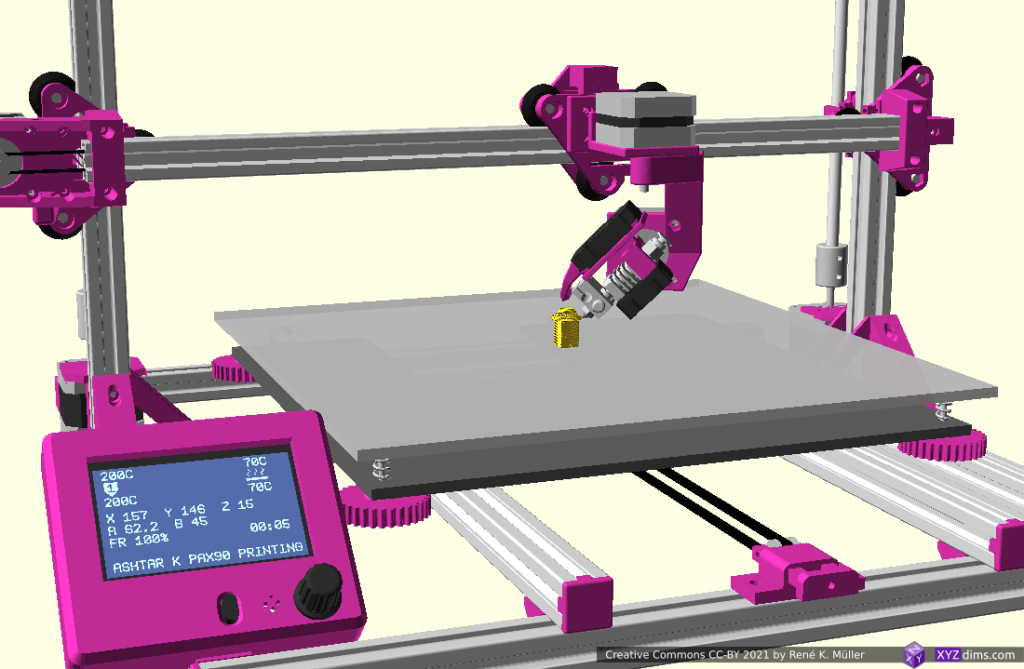
5-axis PAX90 setup
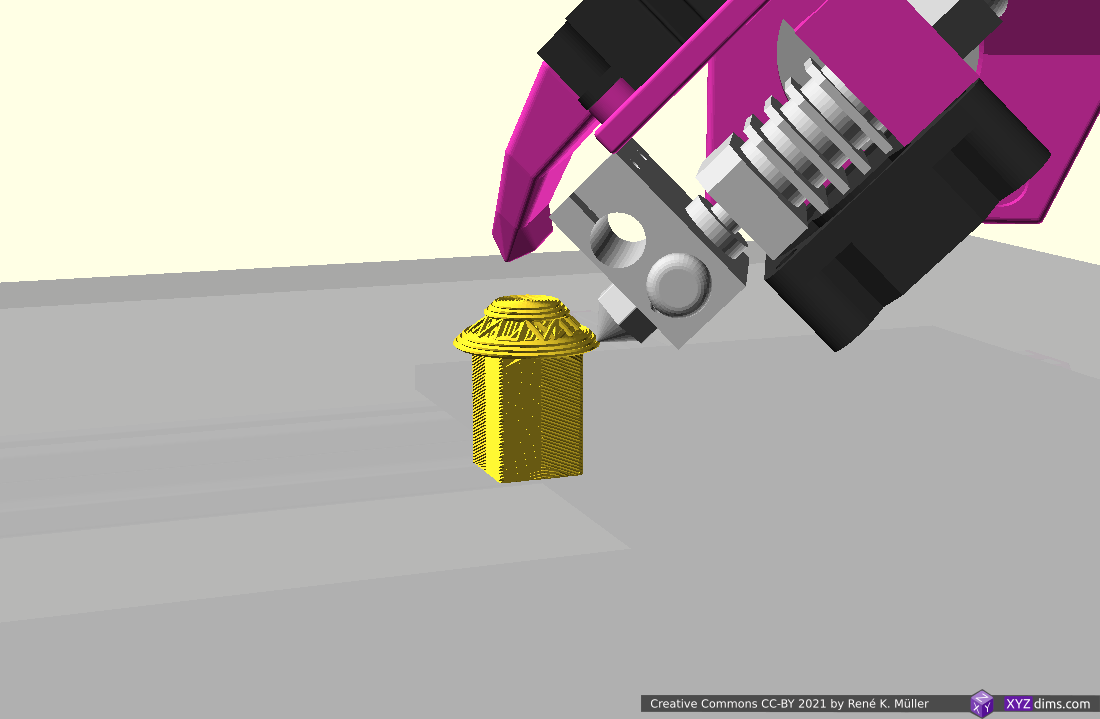
5-axis PAX90 printing 45° cone sliced model
5-axis PAX90 printing 45° cone sliced model
A 5-axis Penta Axis (PAX) supports other slice methods than horizontal-, angled- or conic-sliced, but any variable build-orientation, but will make the slicing software very complex to recognize those sub-volumes suitable for advanced slicing methods.
This also means, a 5-axis PAX slicer with proper settings can produce G-code for 5-, 4- and 3-axis 3D printers with combining the horizontal-, angled- and cone slicing for sub-volumes or segments.
Traditionally Horizontal Layers
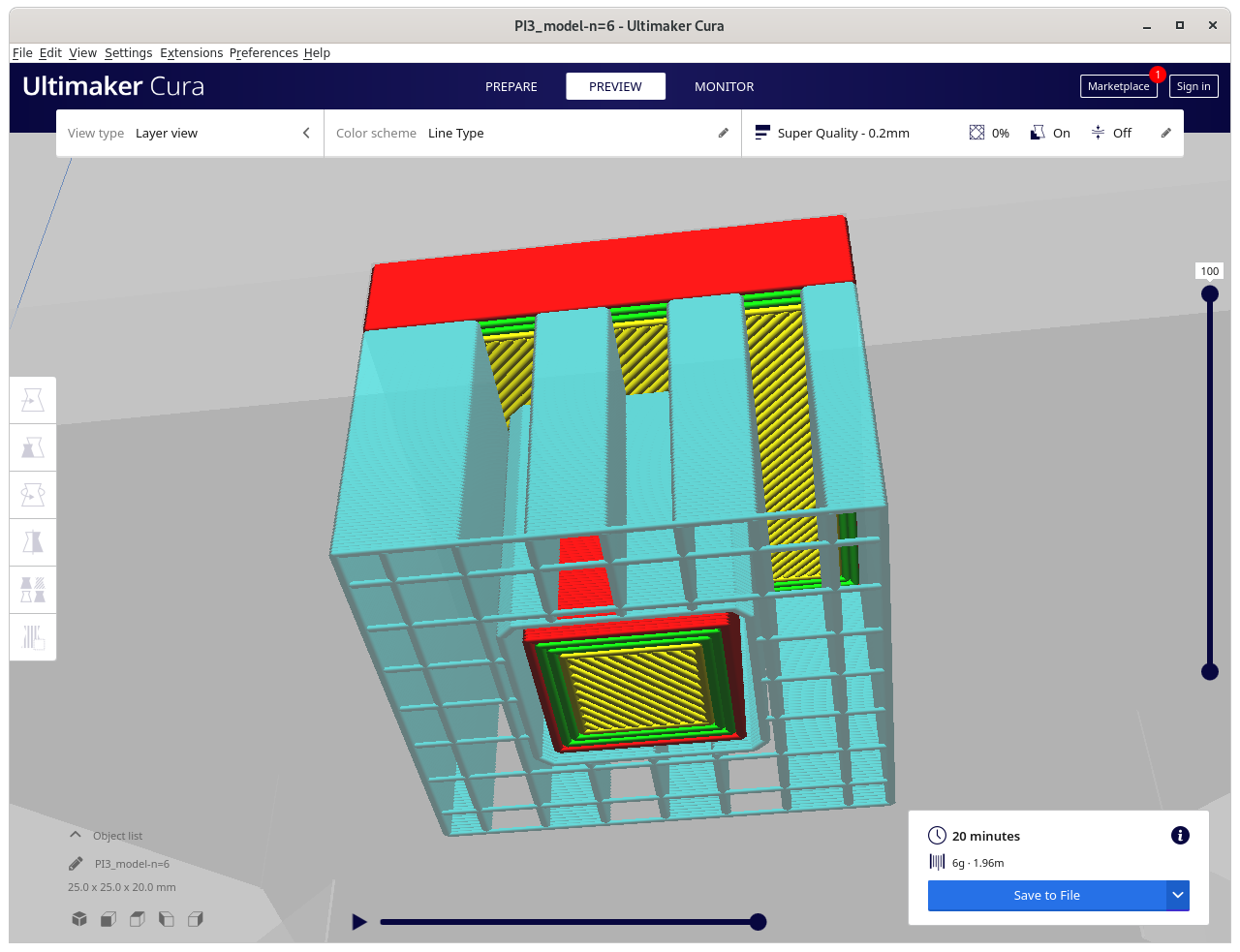
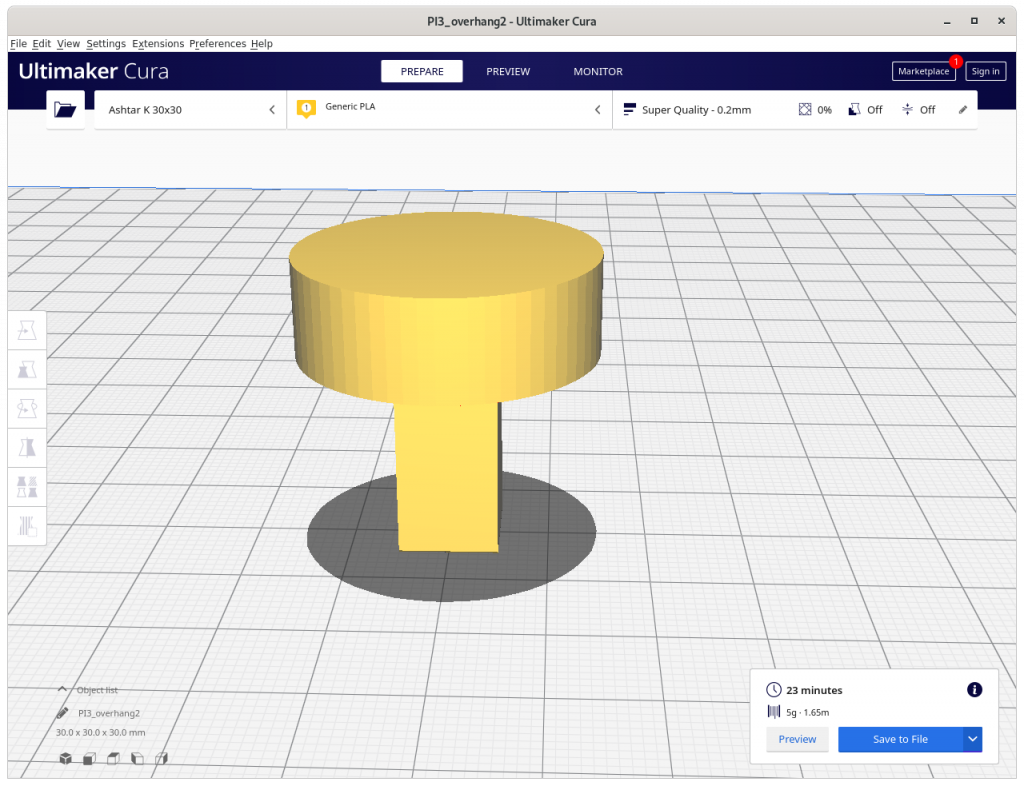
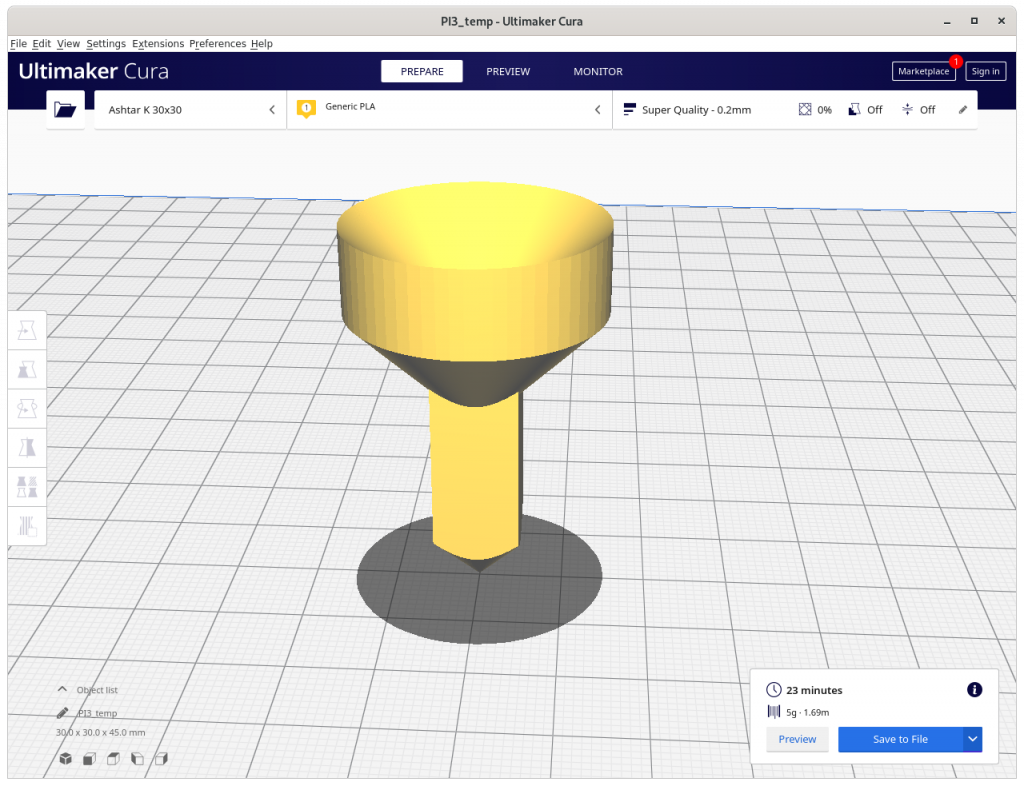
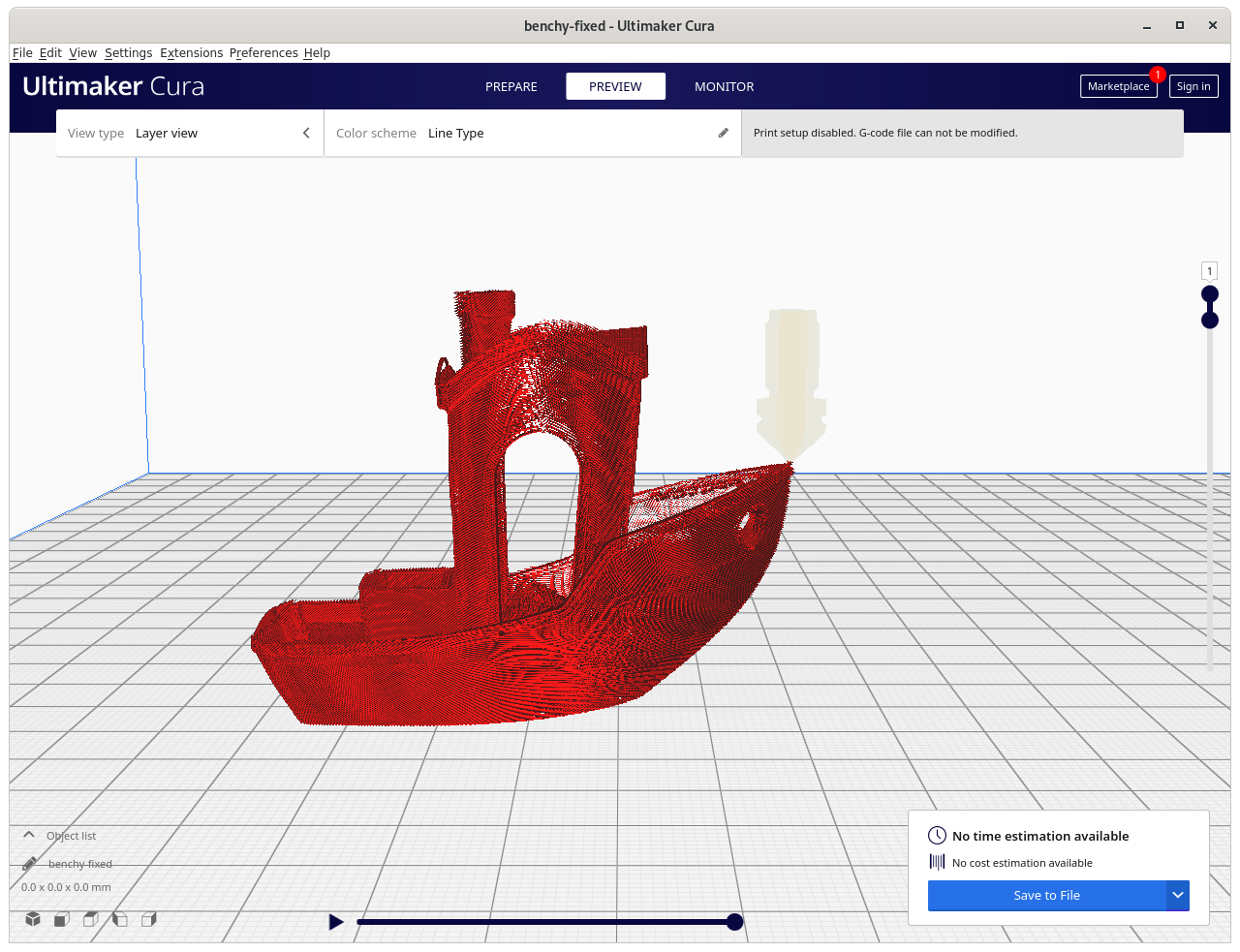
Slic3r 1.2.9 and Ultimaker Cura 4.8 as comparison:
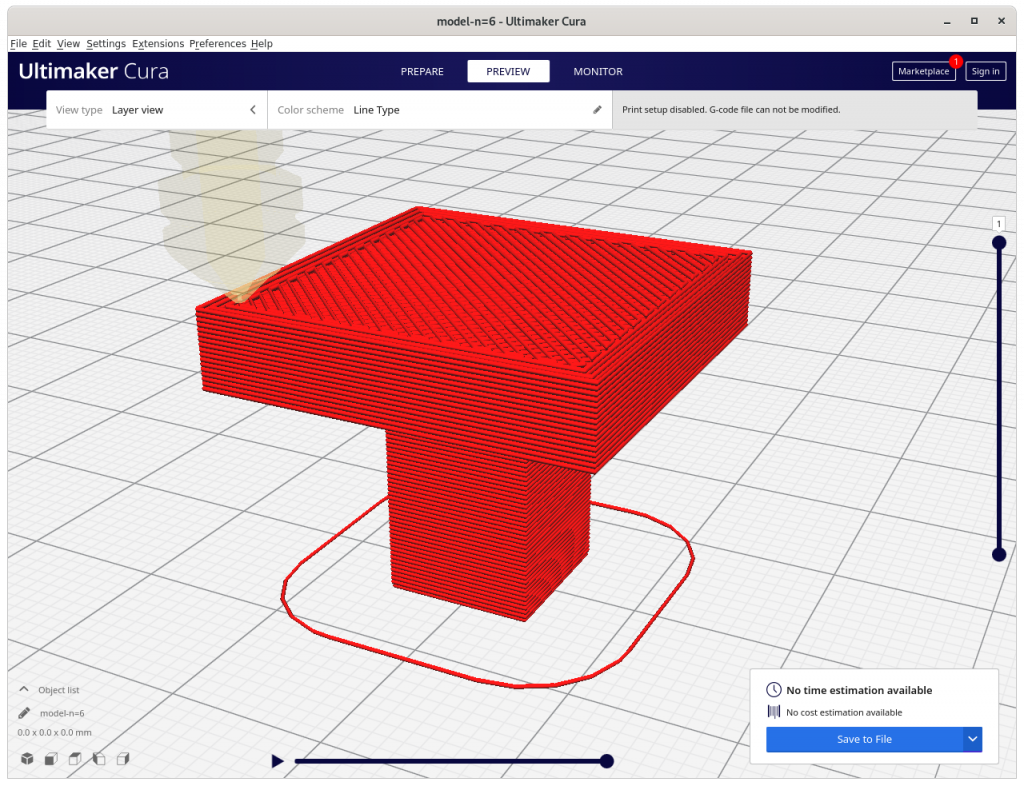
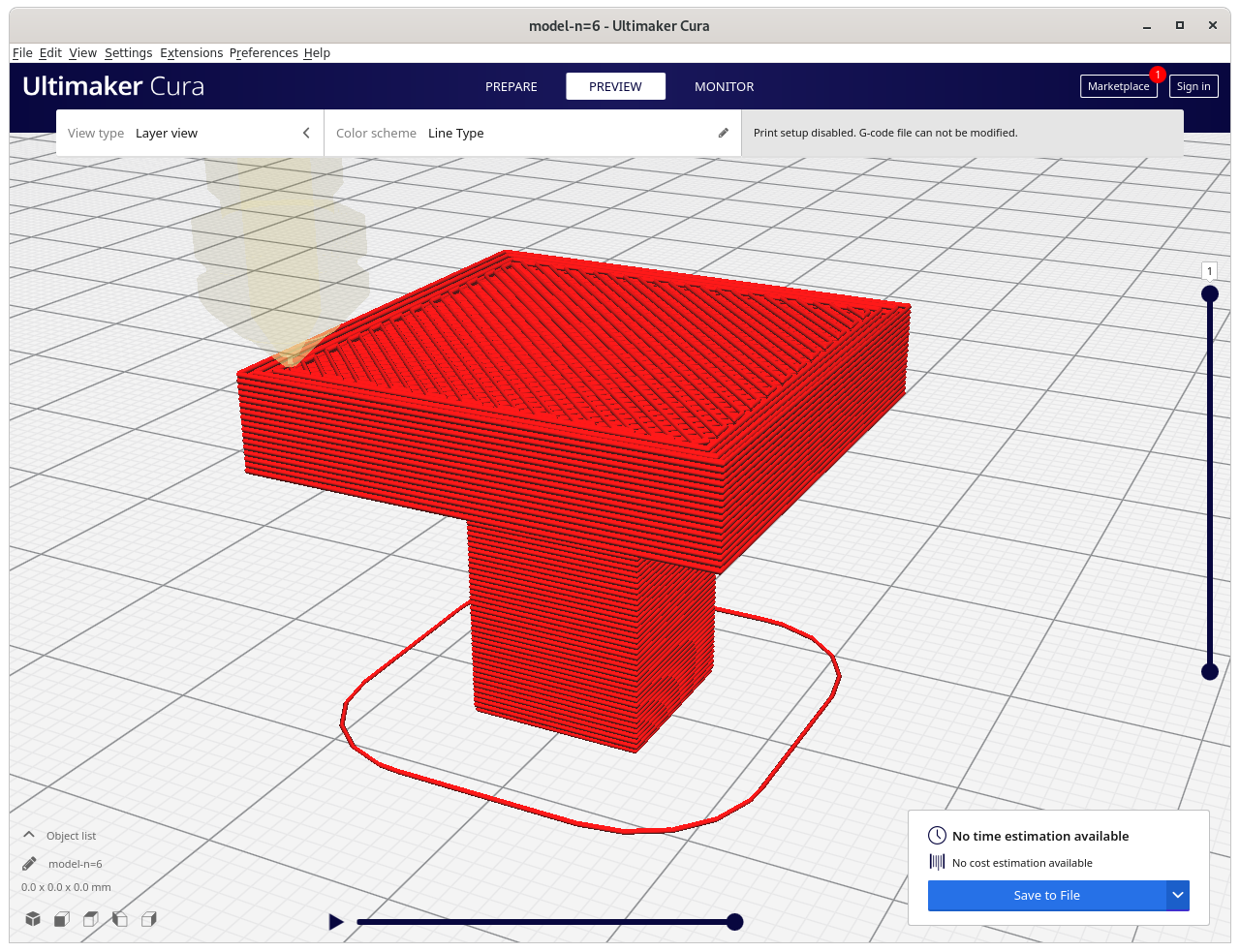
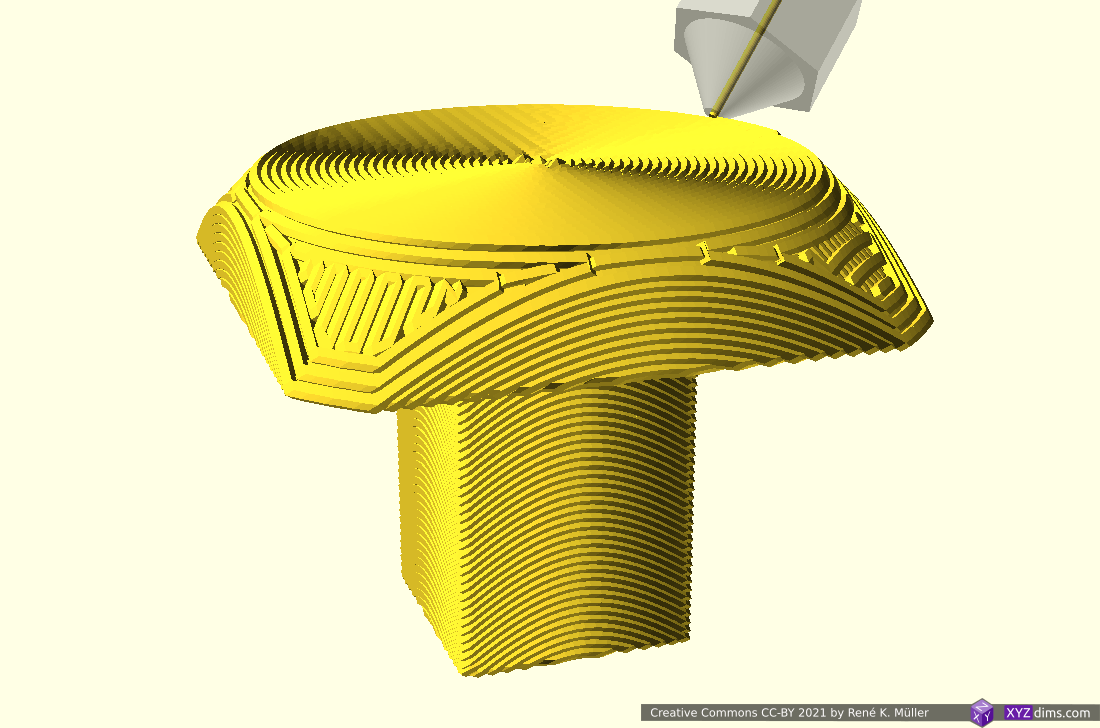
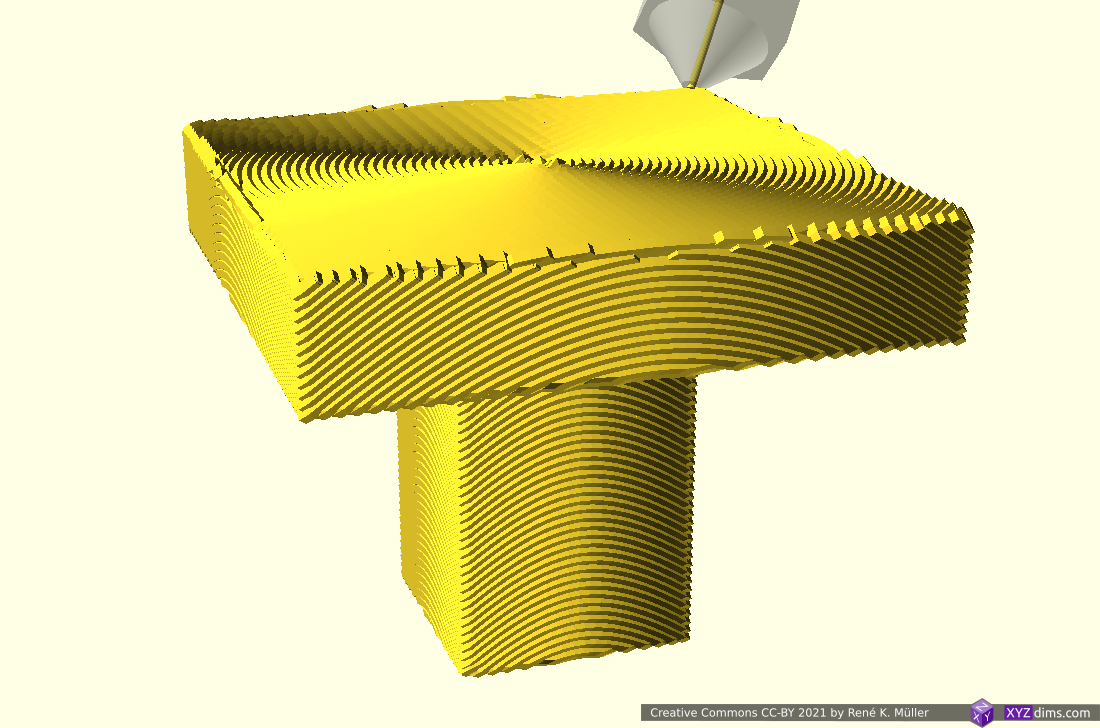
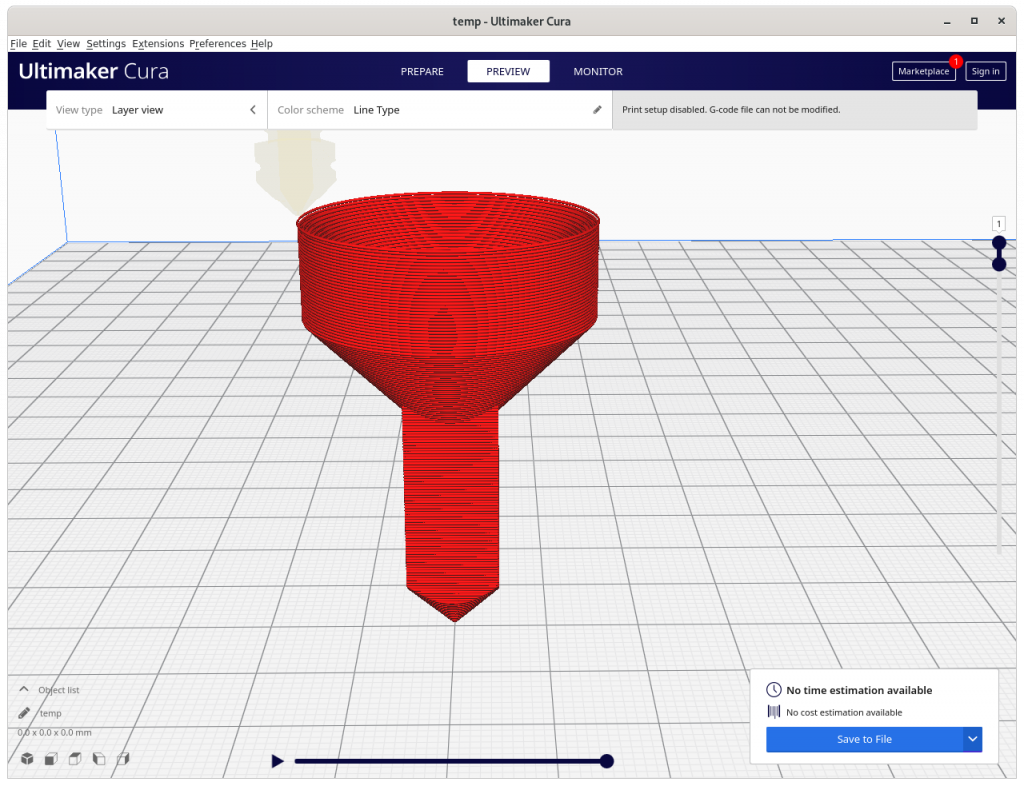
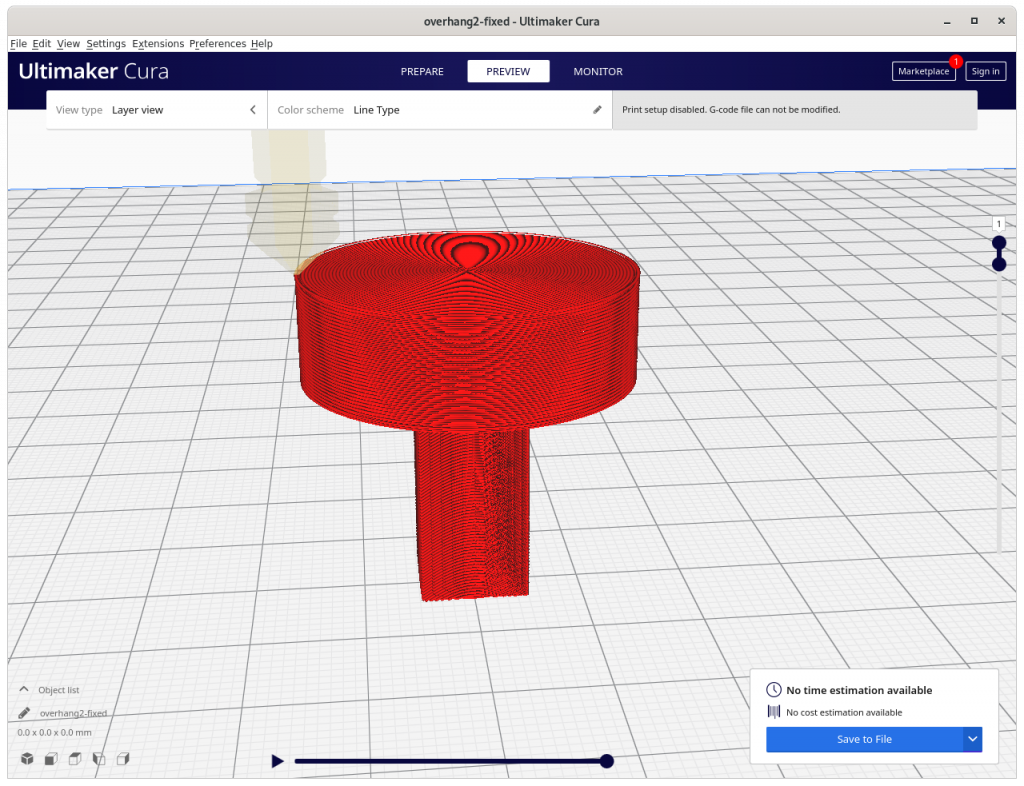
Slic3r 1.2.9 G-code (viewed in Cura)
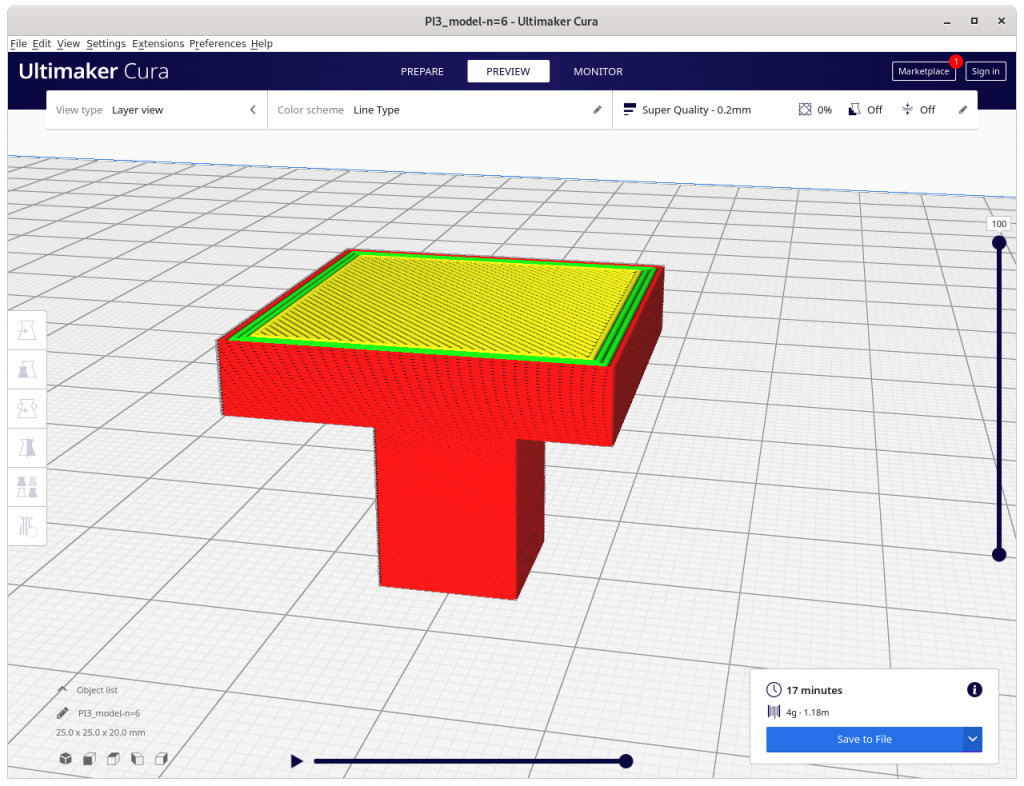
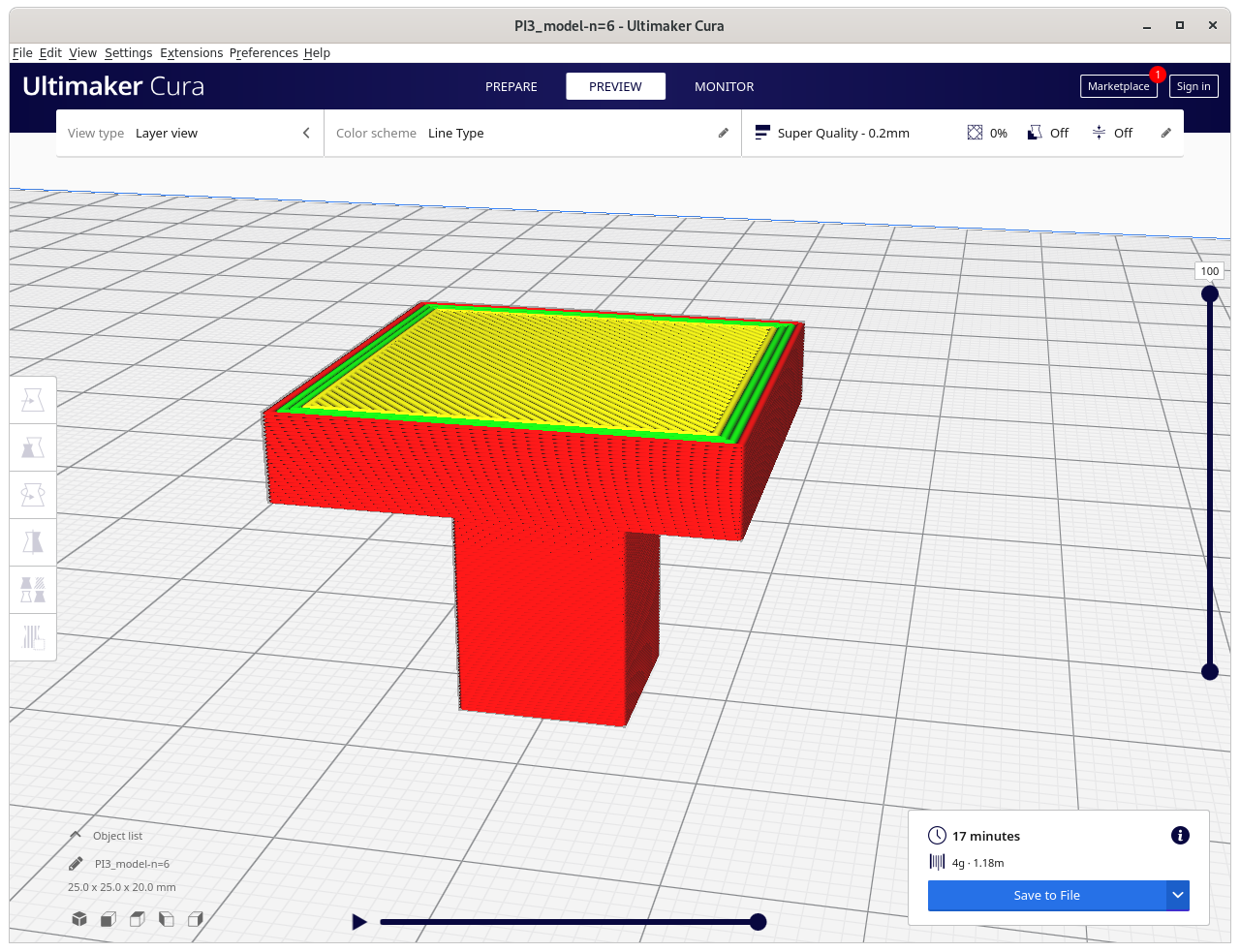
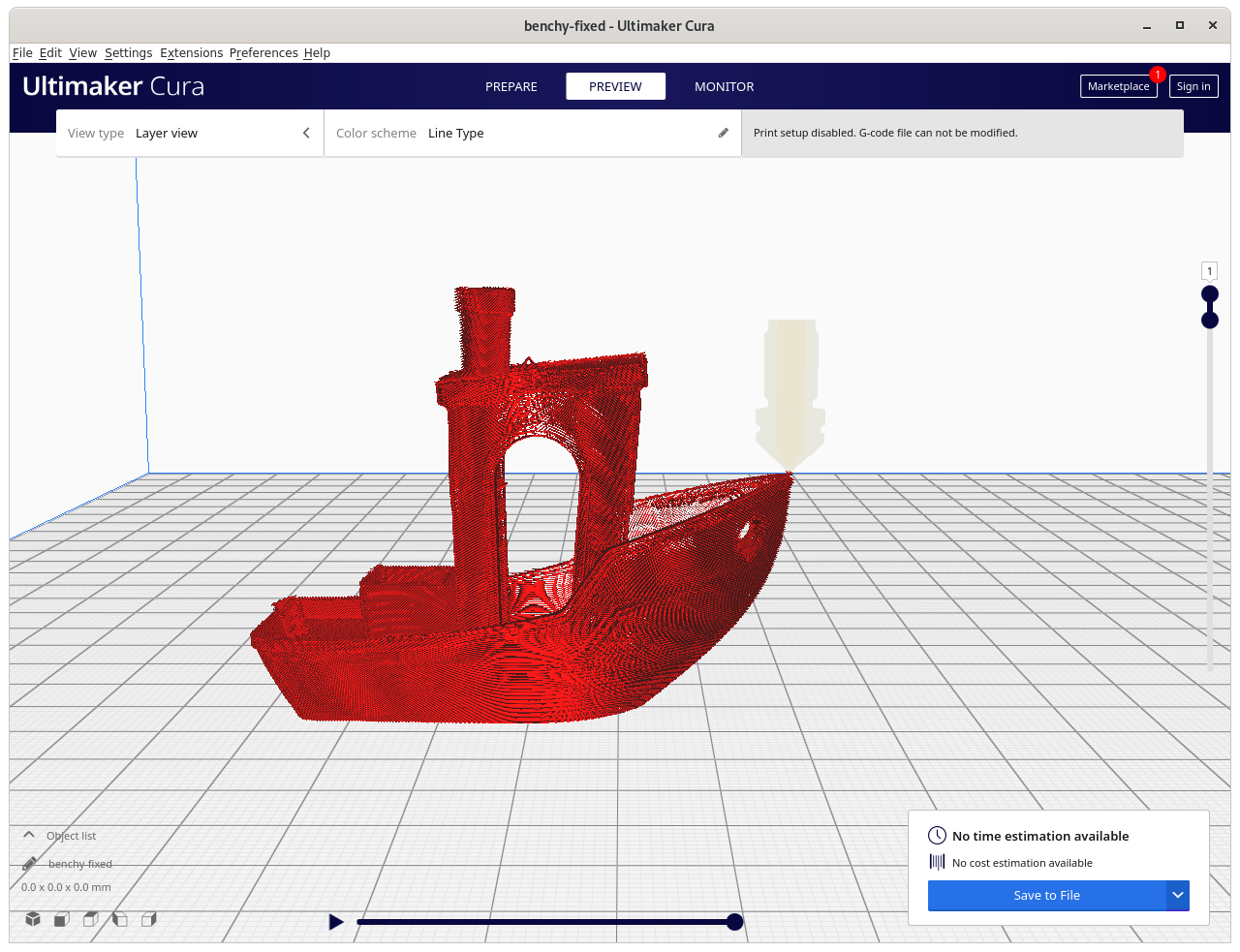
Cura 4.8 G-code
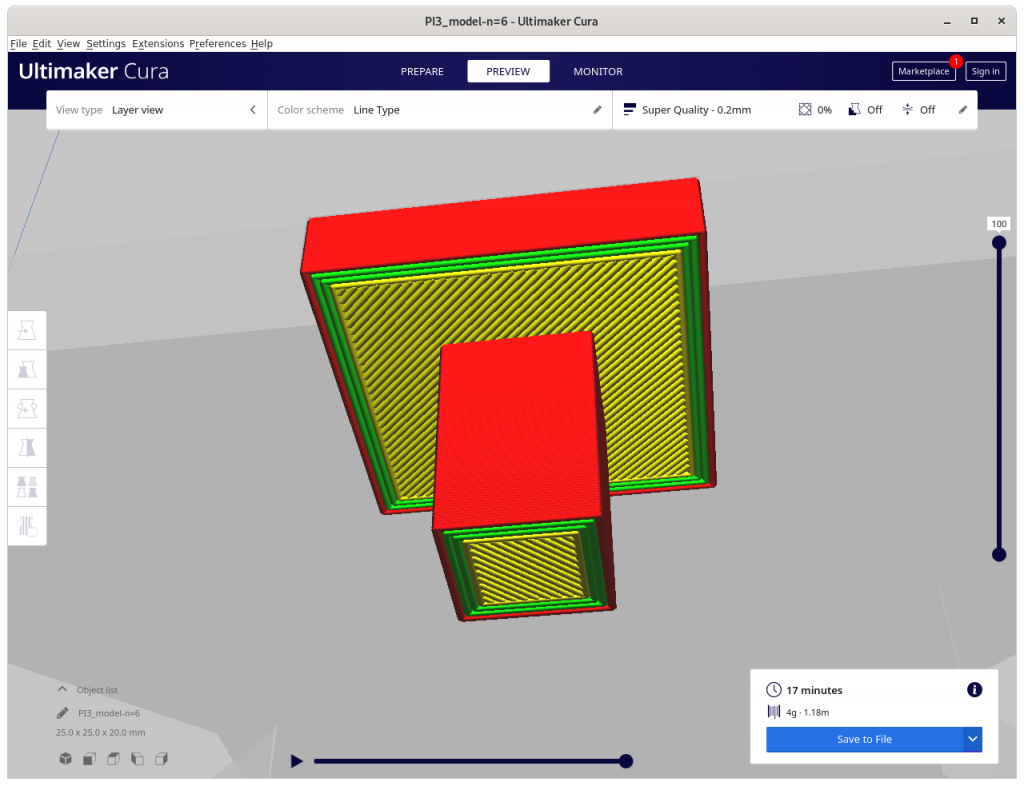
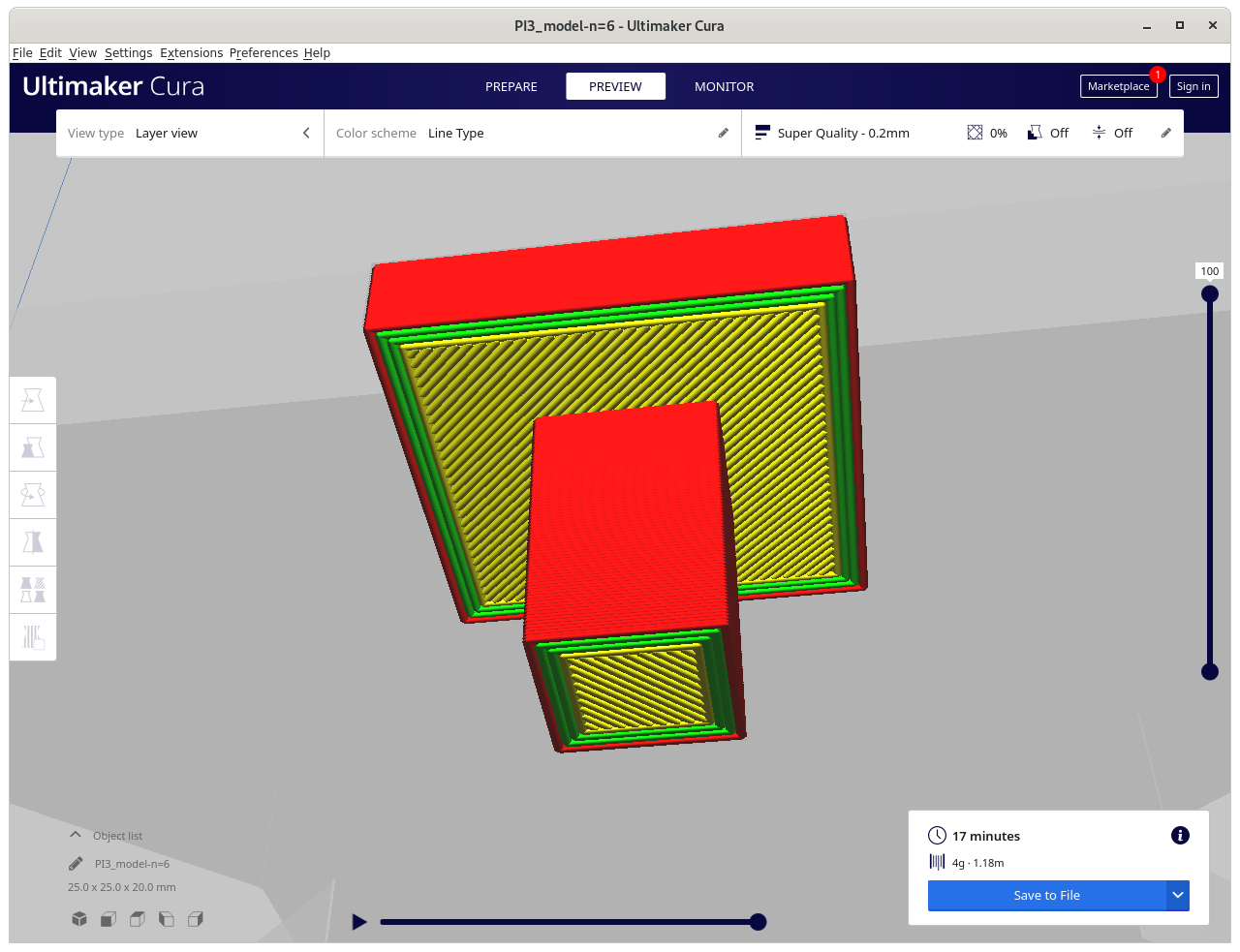
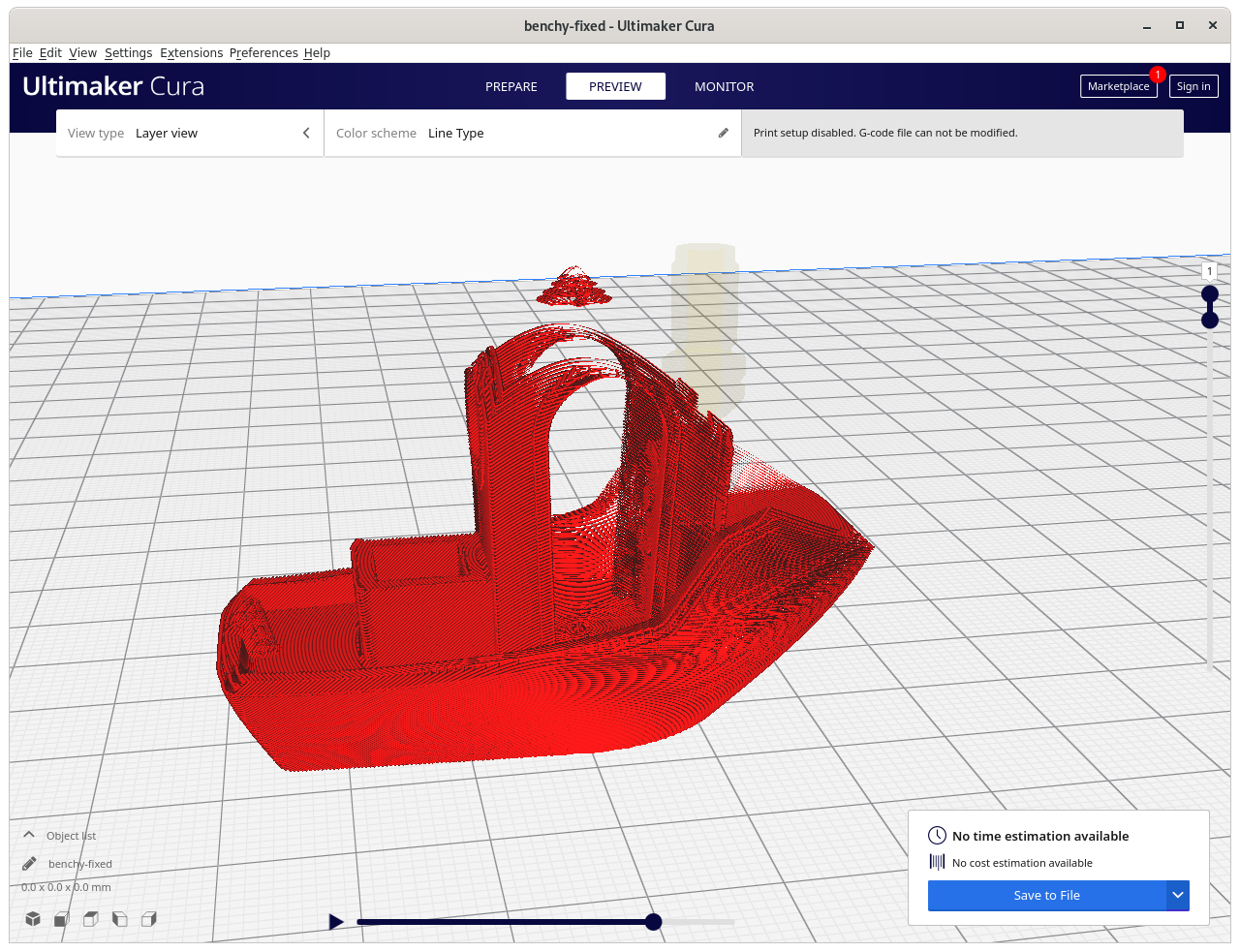
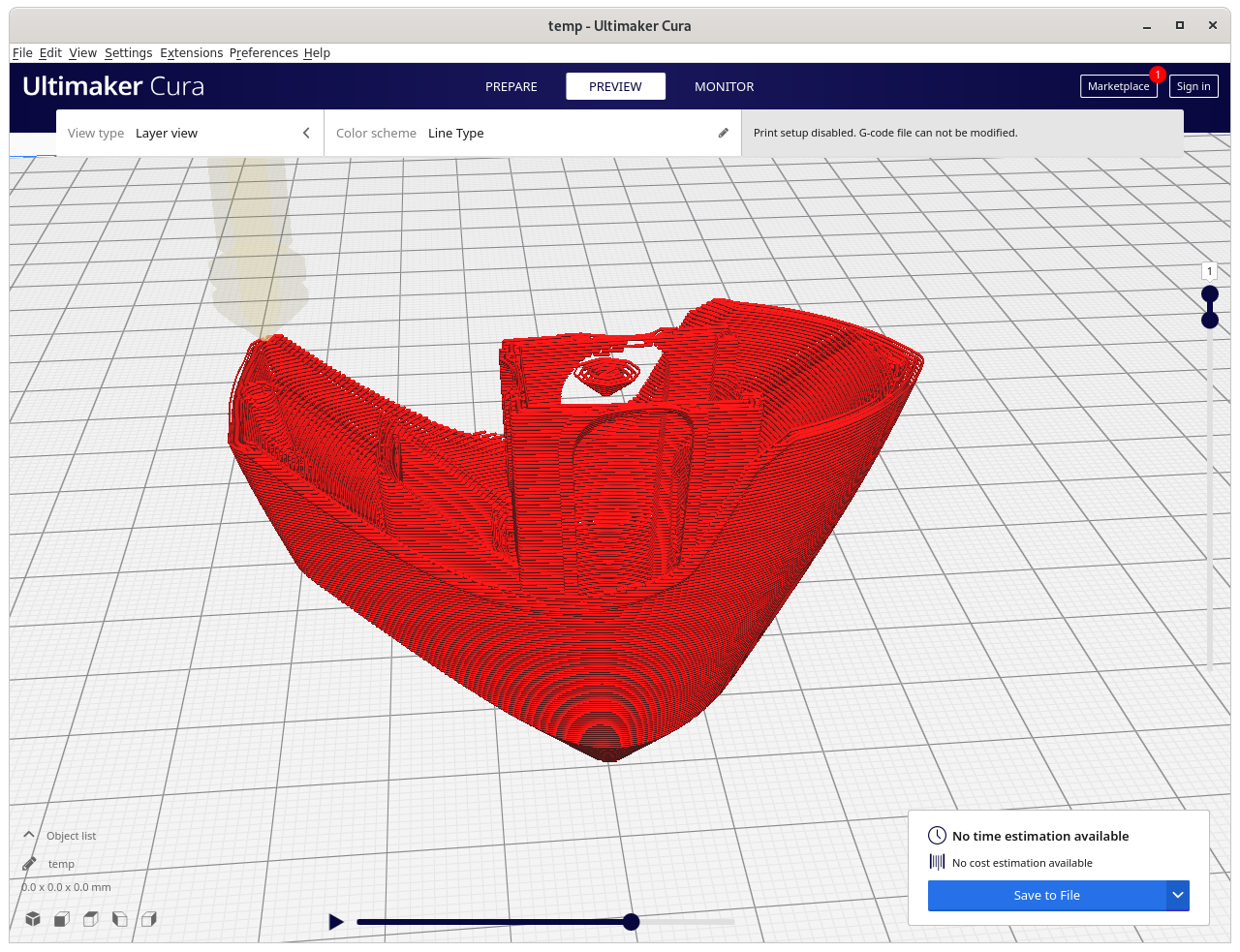
Cura G-code, underside
Cura adds support structure, apprx. 30% of material just for support
2021/03/19: some information on use of slicer4rtn (not yet released)
2021/03/09: removed lengthy “Test Protocol” and extended “Gallery” section a bit
2021/03/08: slicer4rtn at 0.2.4 (still unreleased) resulting in better prints, blog-post linked at hackaday
2021/03/05: 95° and 100° overhangs are printable too, more bug-fixes in slicer4rtn
2021/03/04: fixing various bugs in slicer4rtn as disovered printing more complex pieces, supporting prusa-slicer as well aside slic3r, pushing the limits with overhangs
2021/03/02: documenting my findings, a few photos, some early conclusions (not even one day old), conic sliced and tilt sliced.
90° Overhangs without support structure on 3-axis 3D printer
Introduction
It has been target of many efforts to print 90° overhangs without support on 3-axis 3D printers as with ordinary Z slicing, each layer requires a support underneath; hence, every overhang then needs a support structure if the model itself doesn’t provide it.
While reflecting on the output of the 4-axis conic sliced models, I thought what if I simply make the cone angle flatter than 45° but 15-25° so the vertical nozzle can print it?
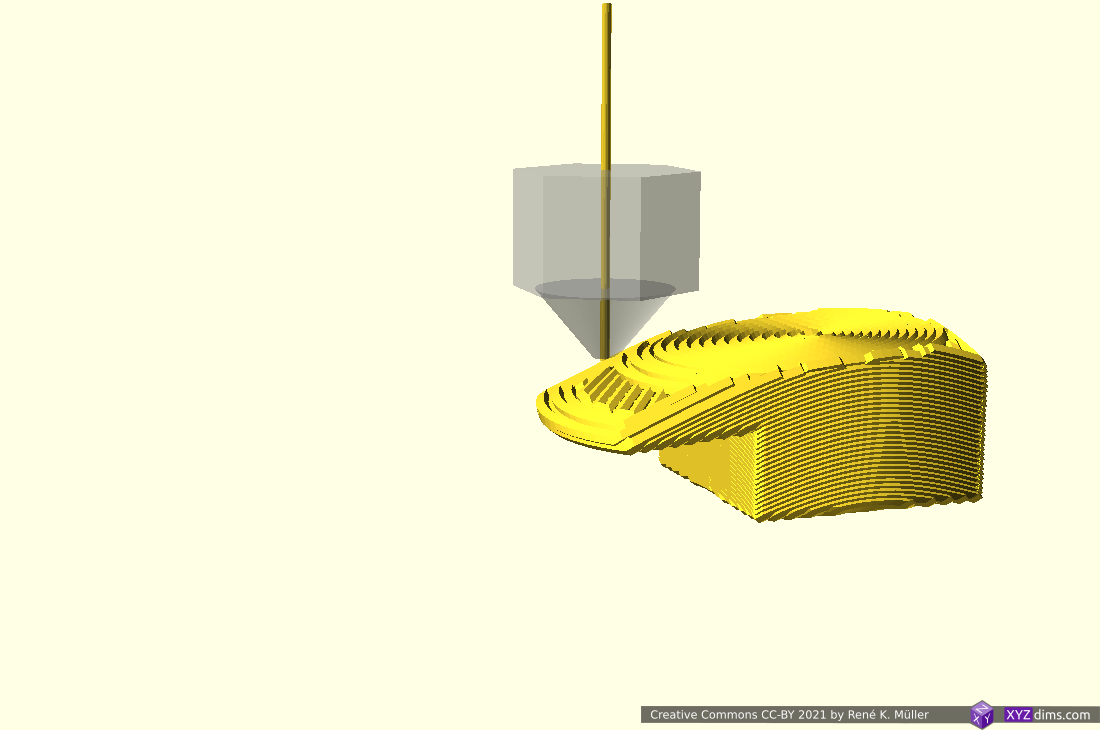
Overhang model conic sliced at 25° angleslicer4rtn --angle=22.5 sliced overhang model, meant for 4-axis printer, but printed on 3-axis printer
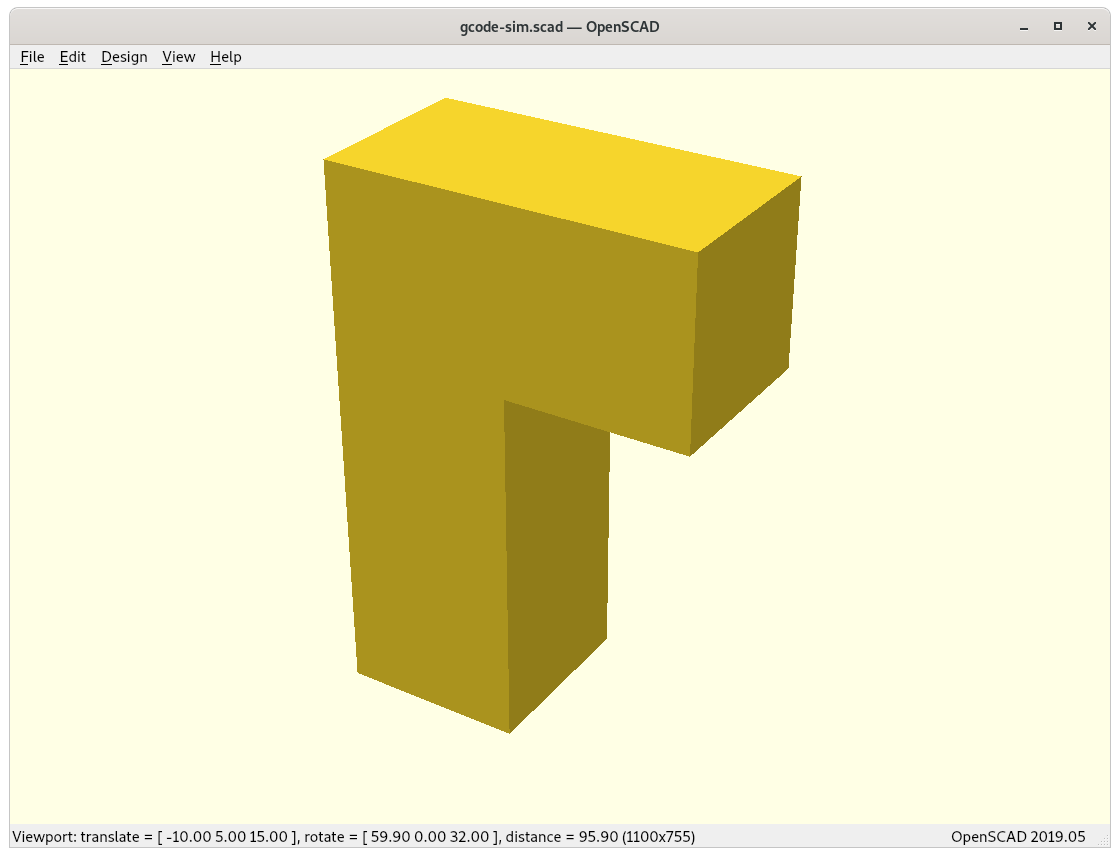
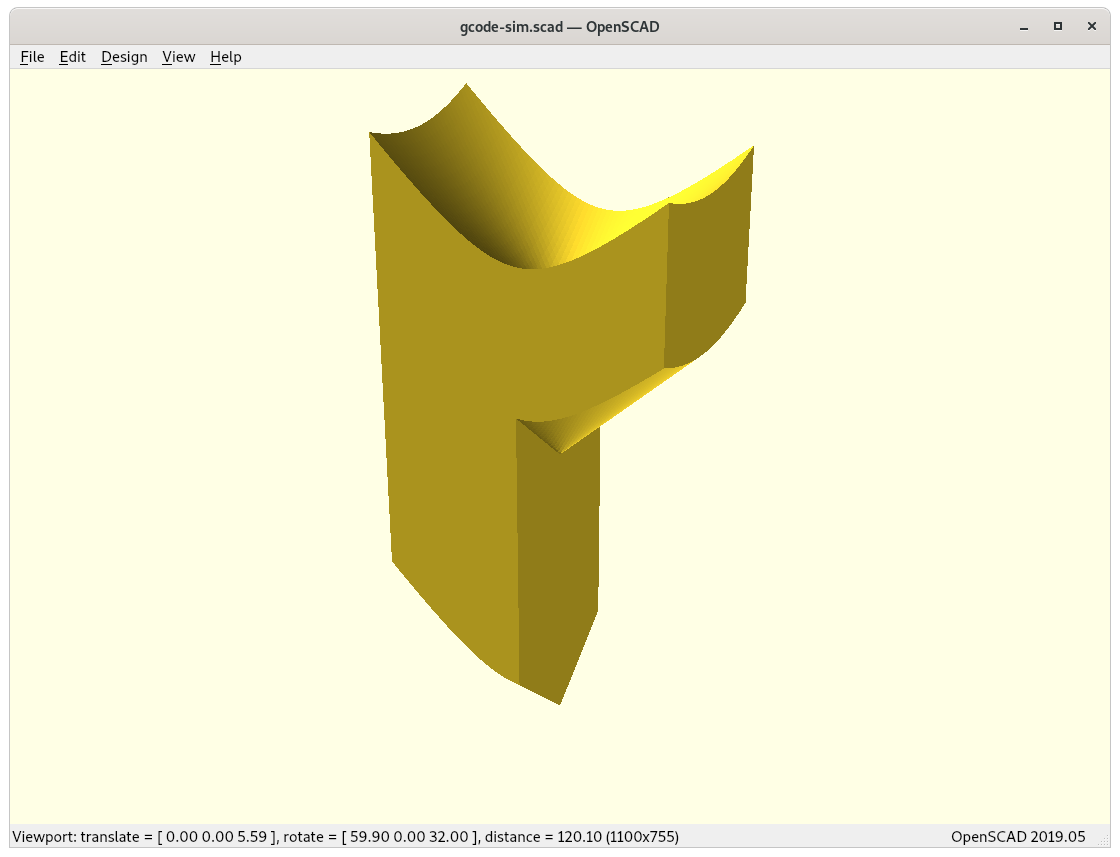
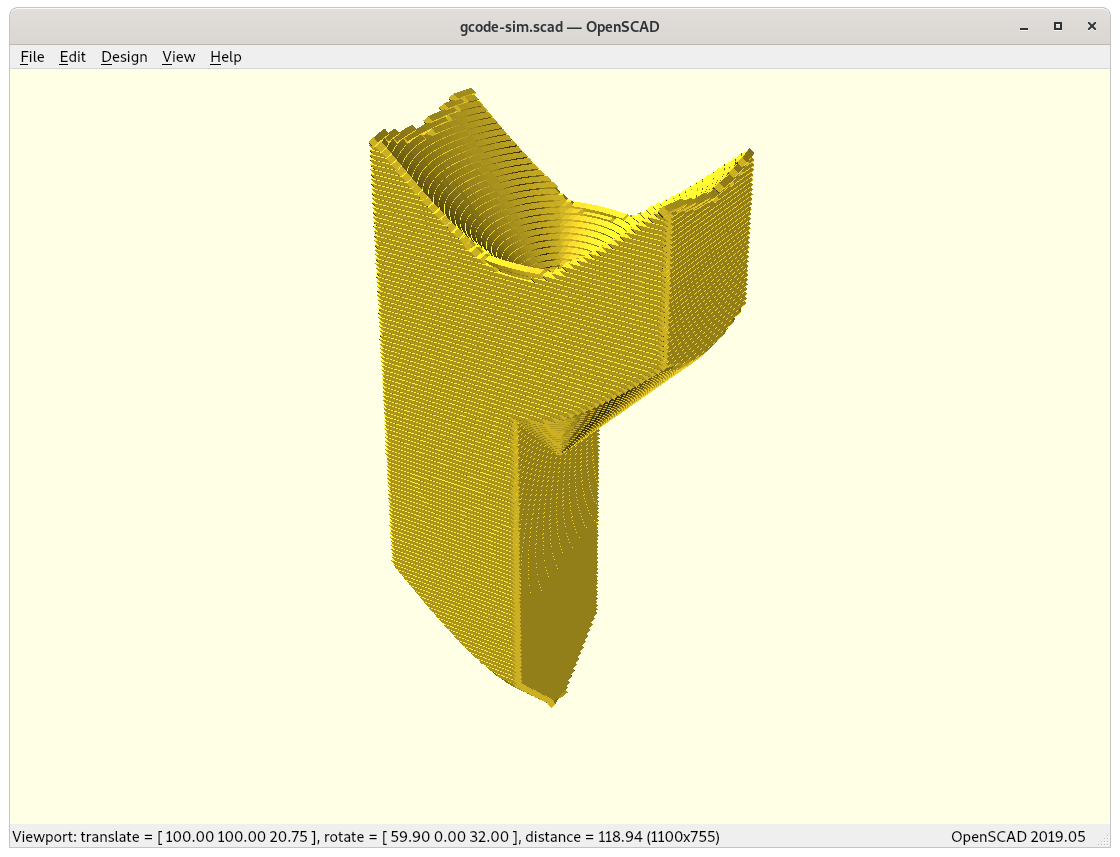
Conic Slices Simulation
A simple overhang model (nr 3) conic sliced at 25° for 0.4mm nozzle, 0.2mm layer height:
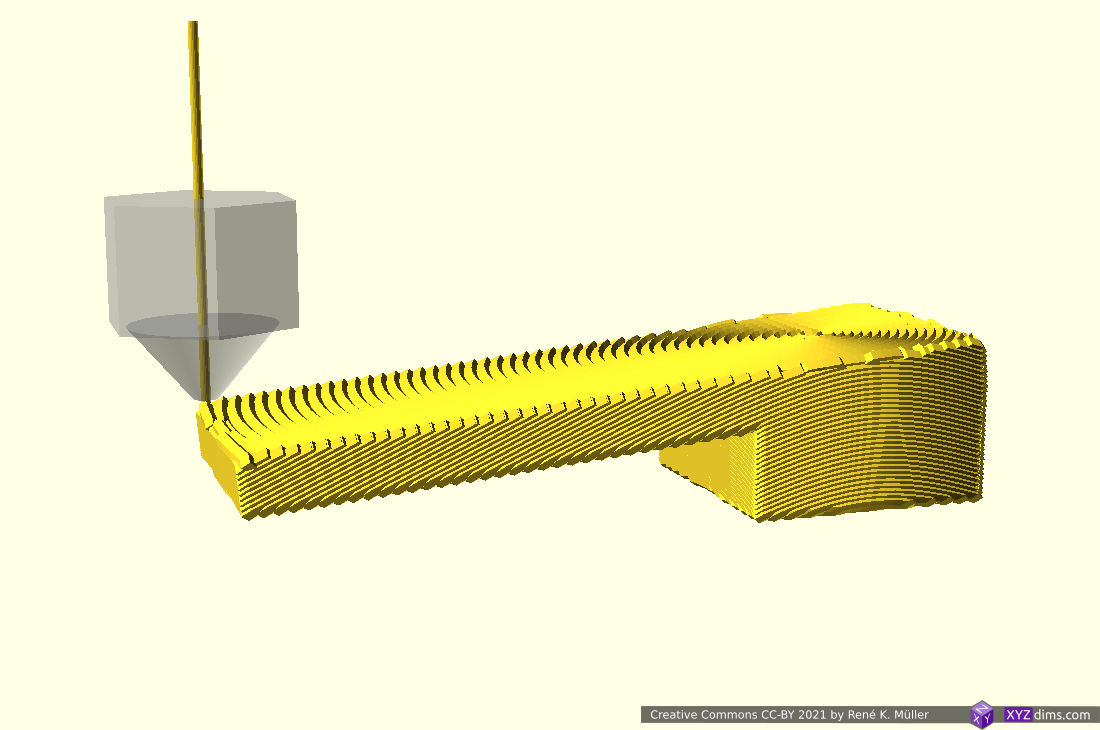
Tilted Slices Simulation
The same overhang model (nr 3) tilt sliced at 25° for 0.4mm nozzle, 0.2mm layer height (like with belt printer):
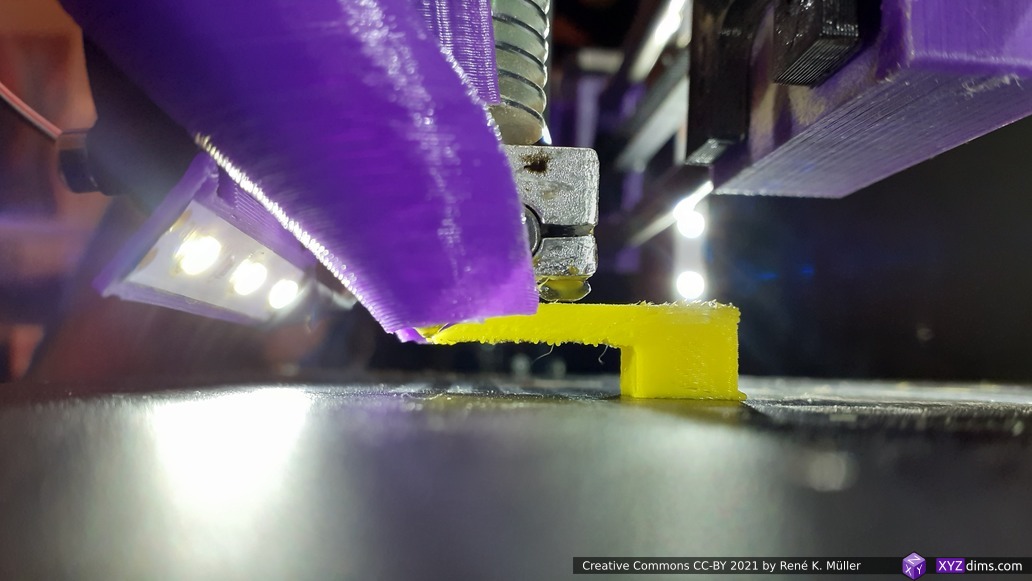
Conic Slices Print Tests
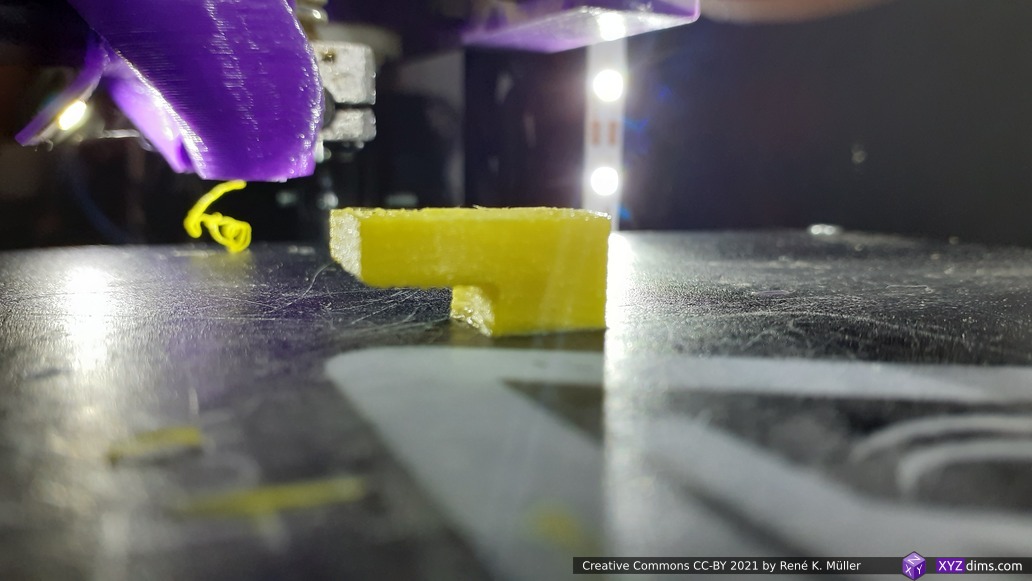
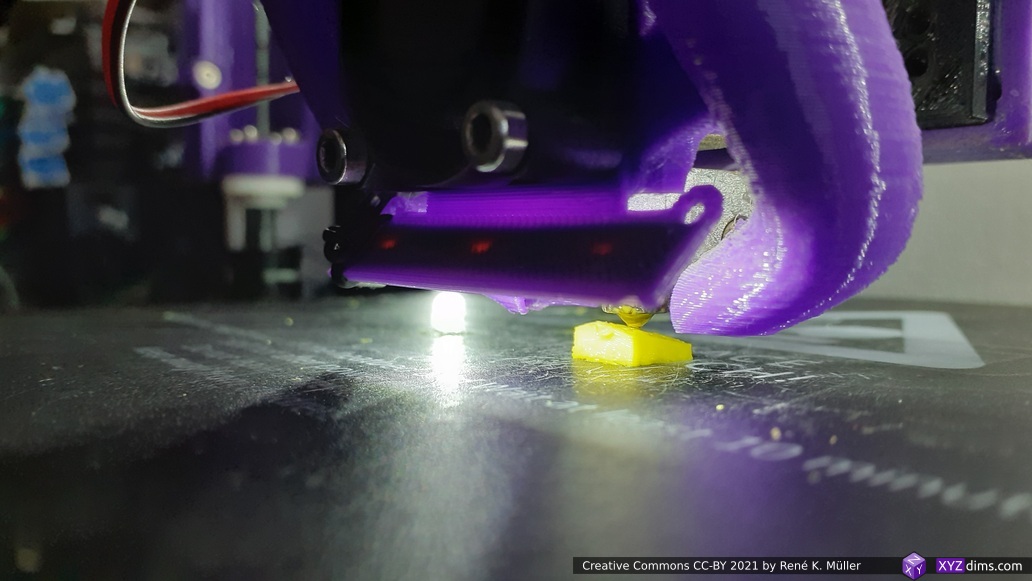
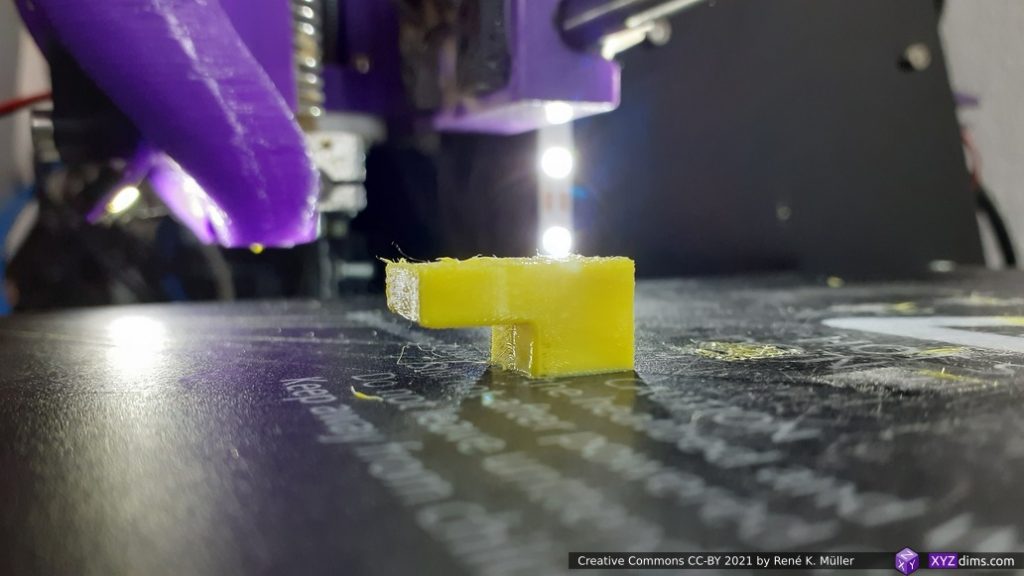
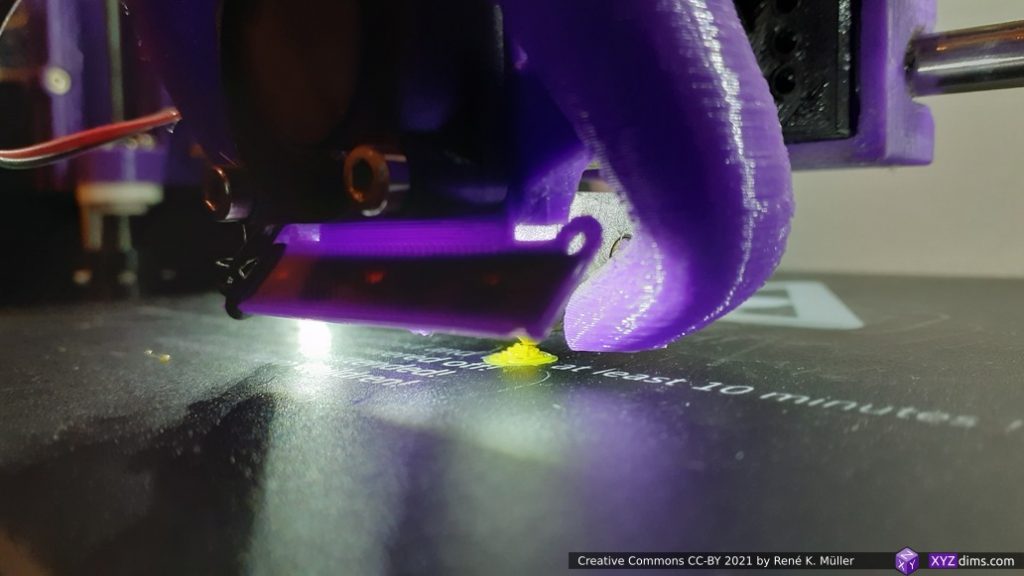
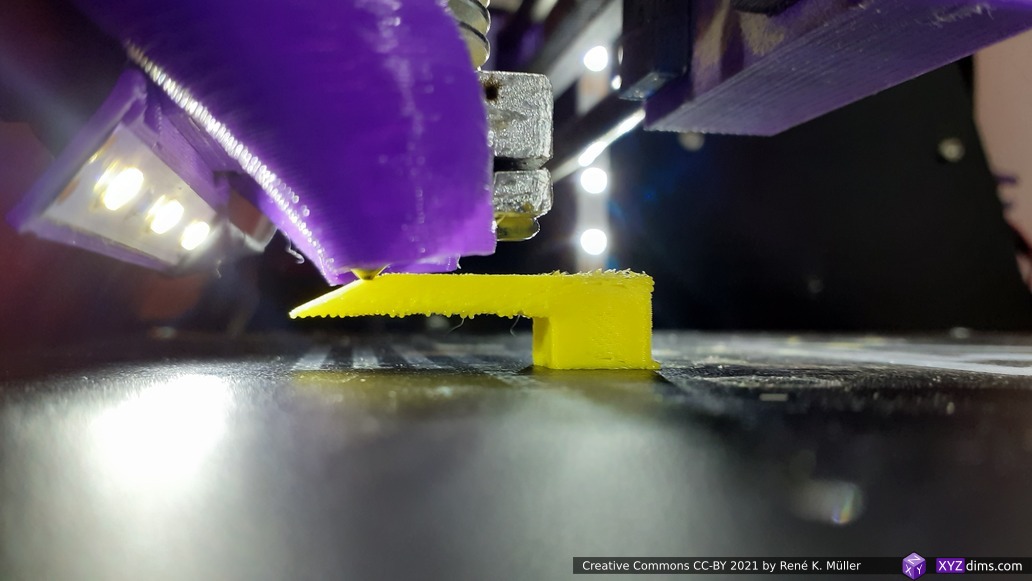
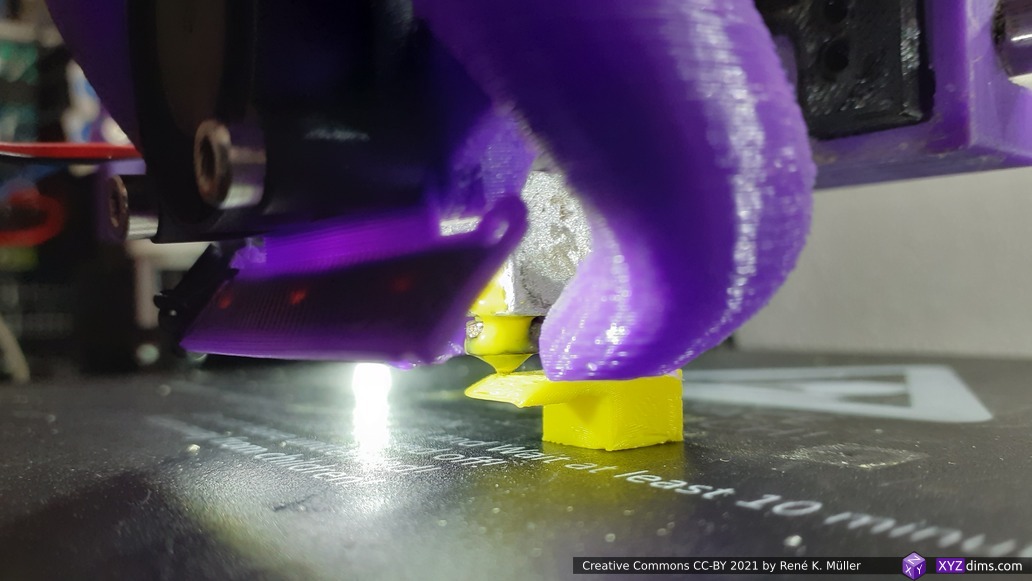
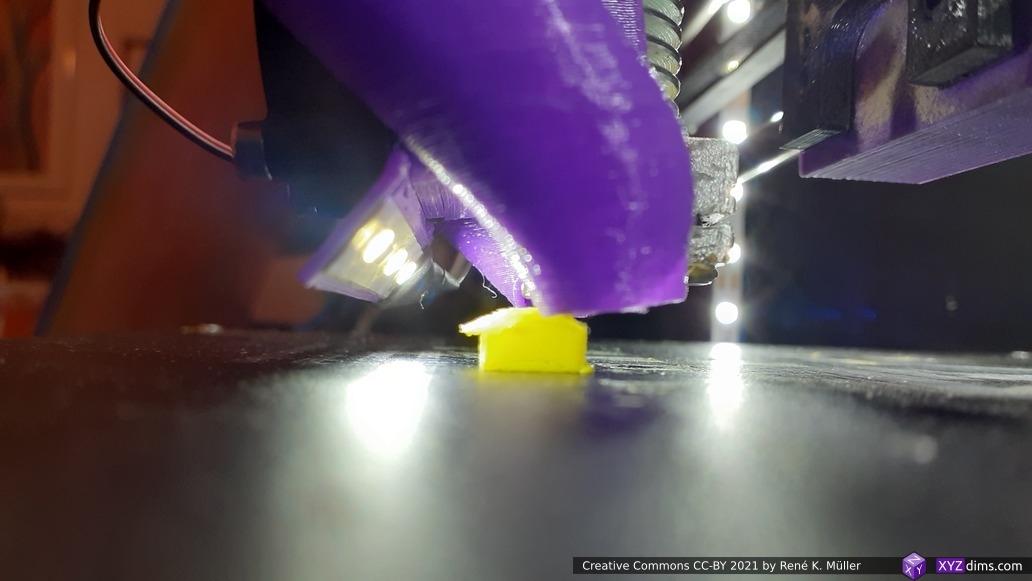
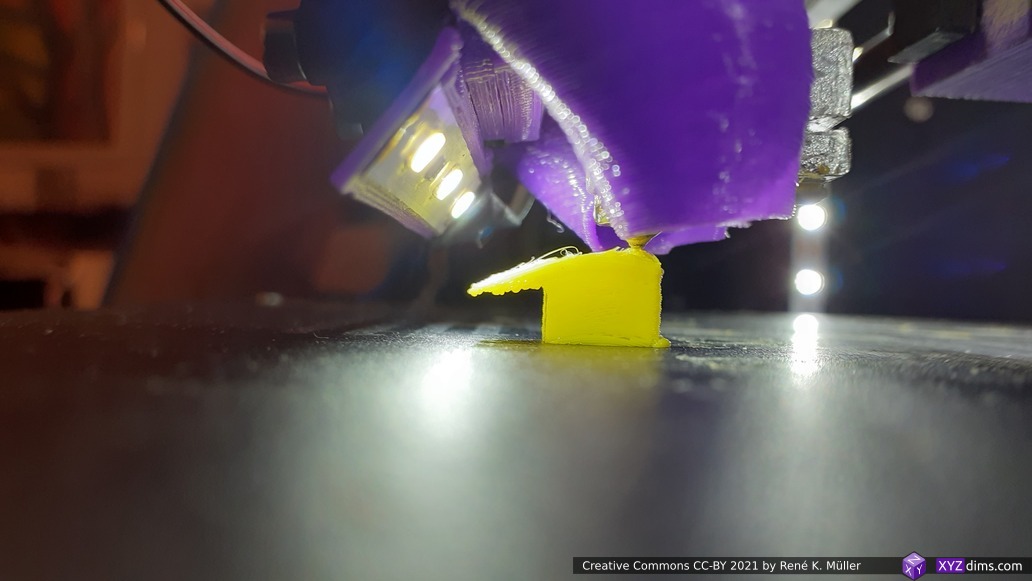
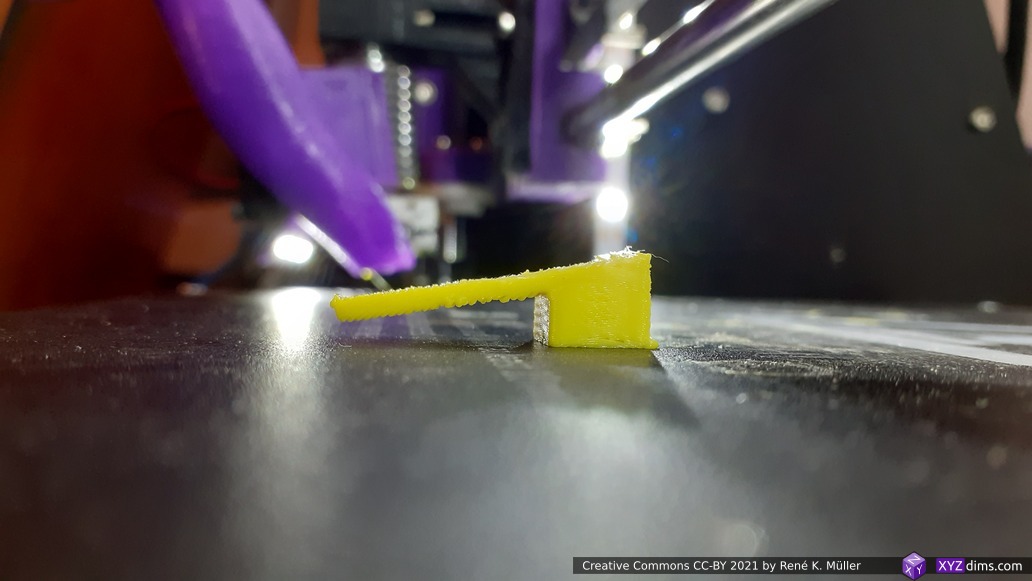
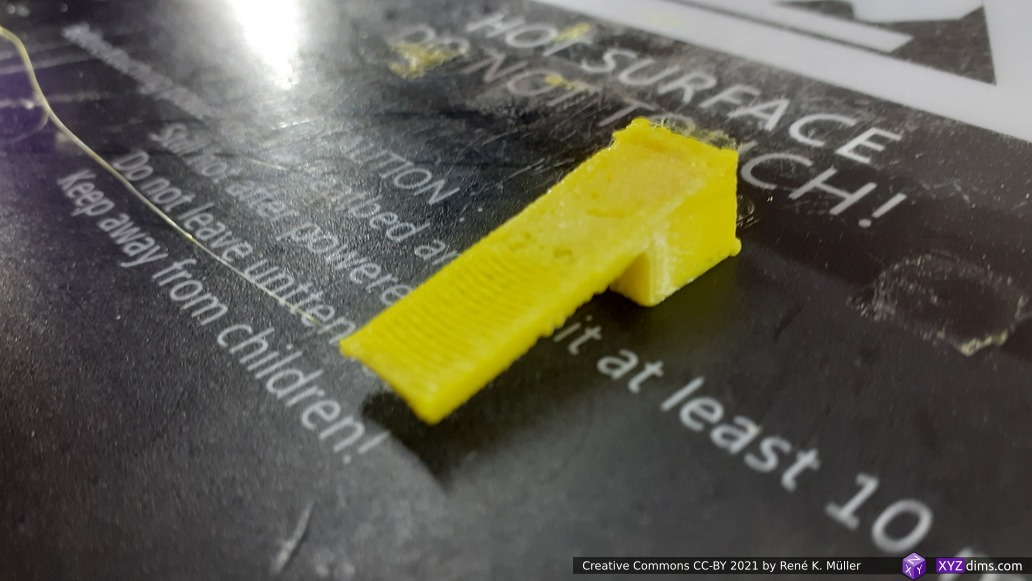
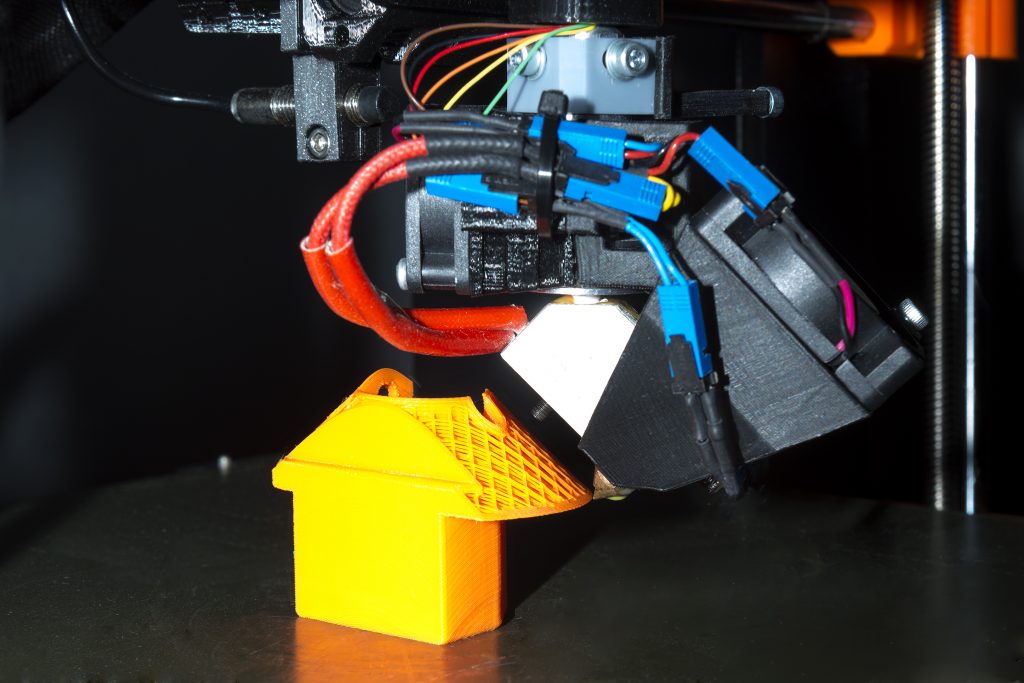
And on the afternoon of March 1st 2021 I ran my G-code for the first time on an ordinary 3-axis printer, a cheap CTC DIY I3 Pro B (Prusa-i3 like), in the attempt to print 90° overhangs, with a conic sliced overhang model:
Wow – it seems to have worked! There were still some issues, like the nozzle without extrusion moved into the print as I forgot map linear motions without extrusion also to conic coordinates as well, and some other minor things.
You may consider this a “backport” of 4-axis slicing procedure back to a 3-axis 3D printing procedure.
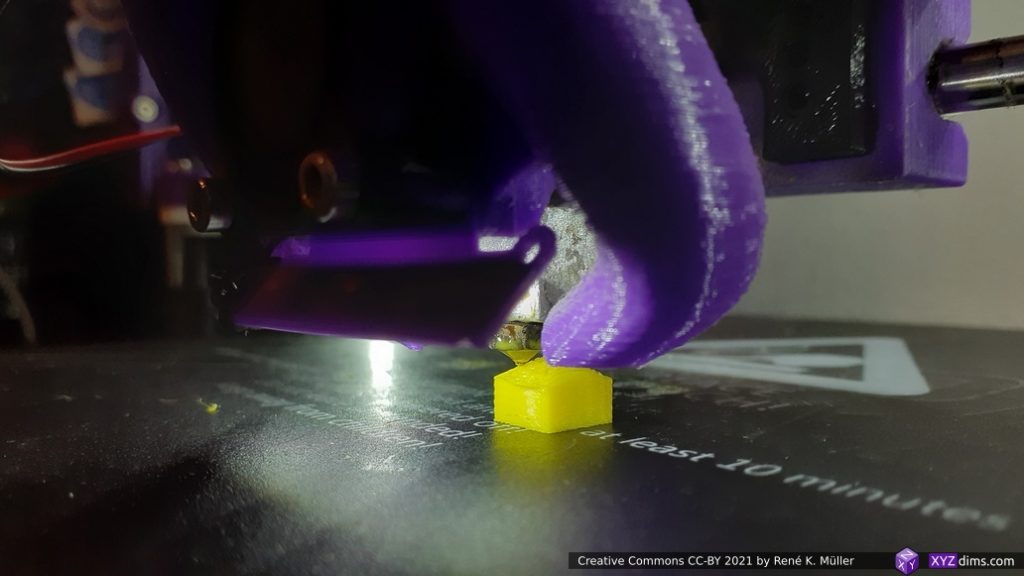
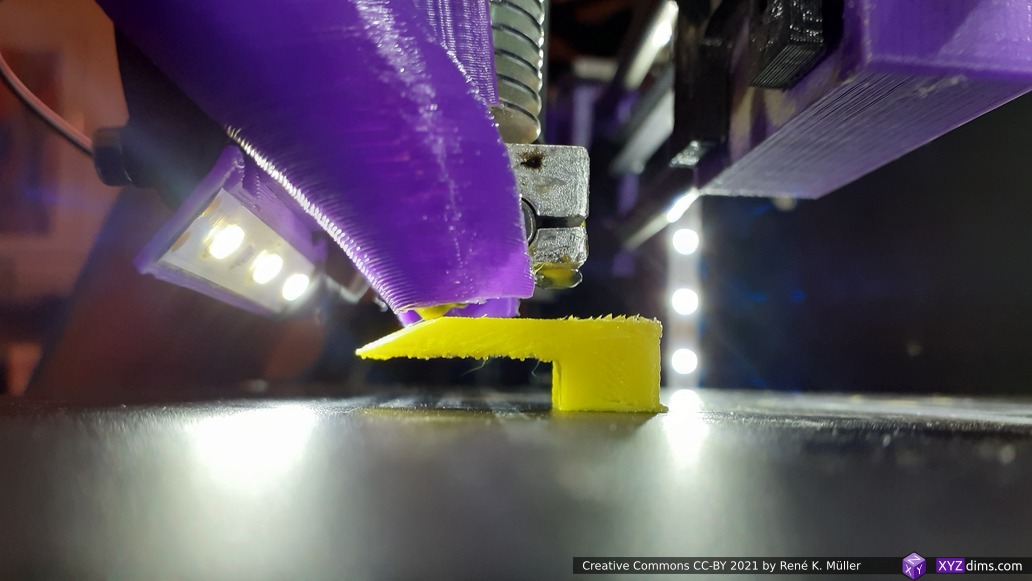
Next Day Attempts
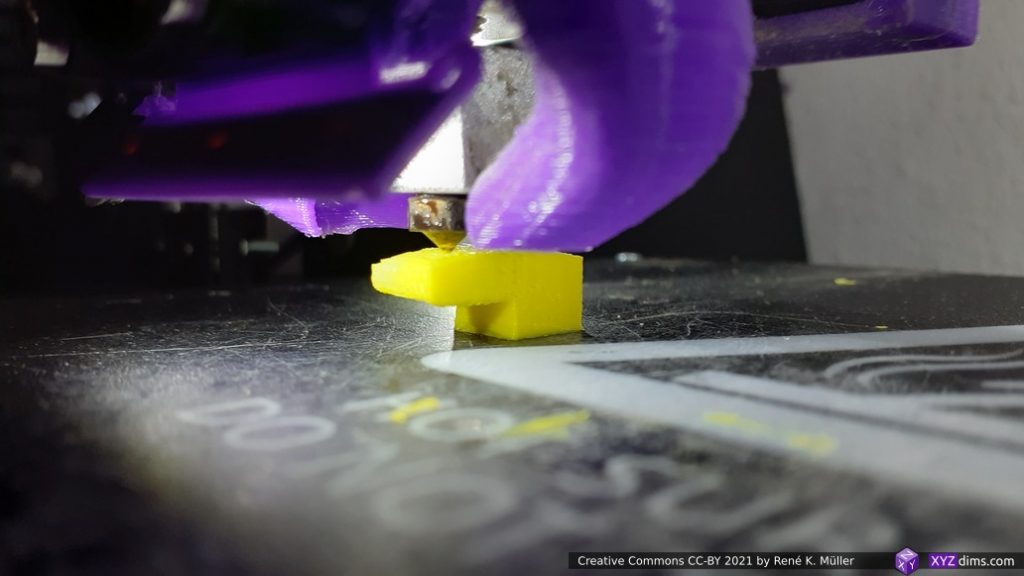
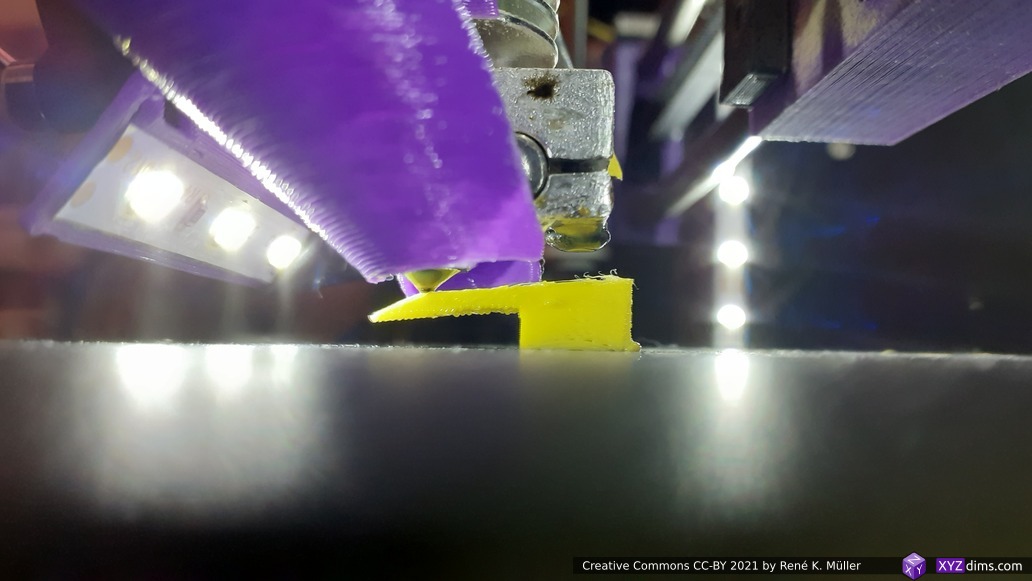
Conic Slices
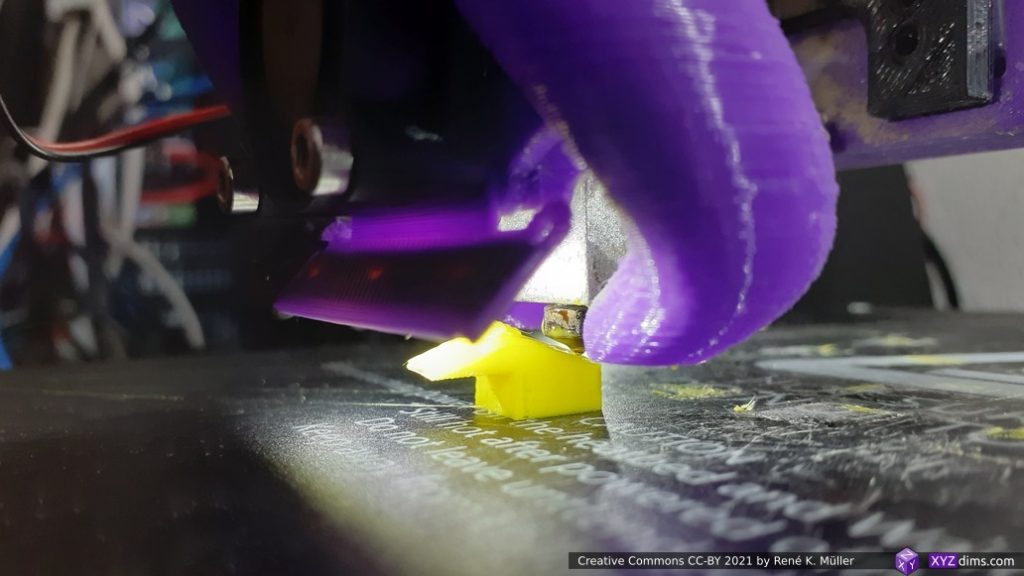
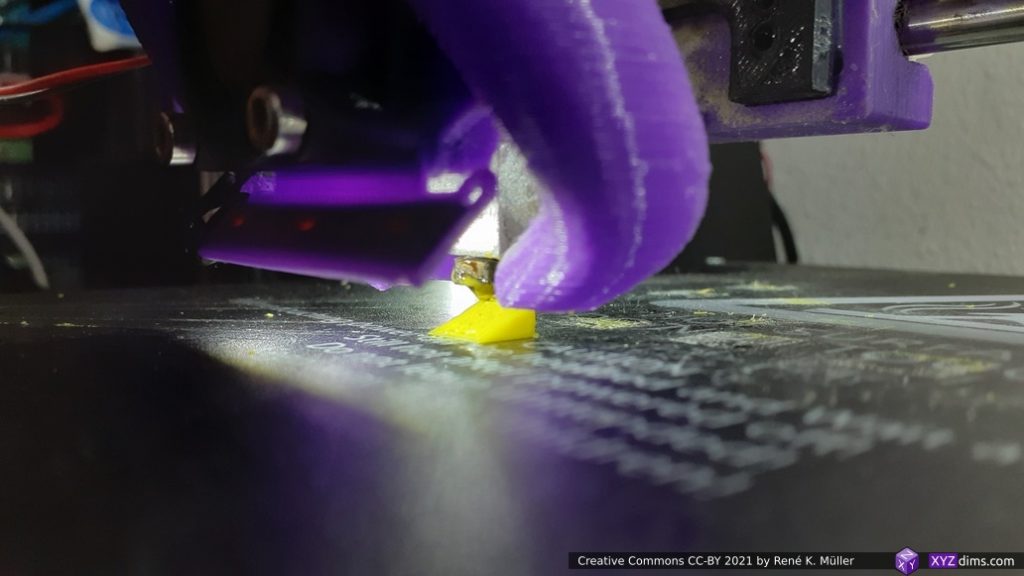
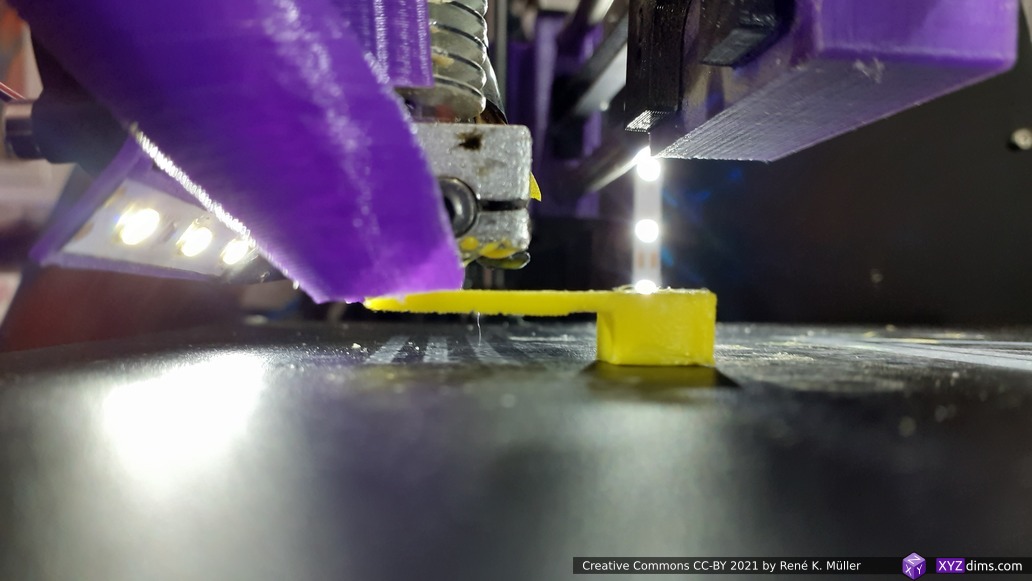
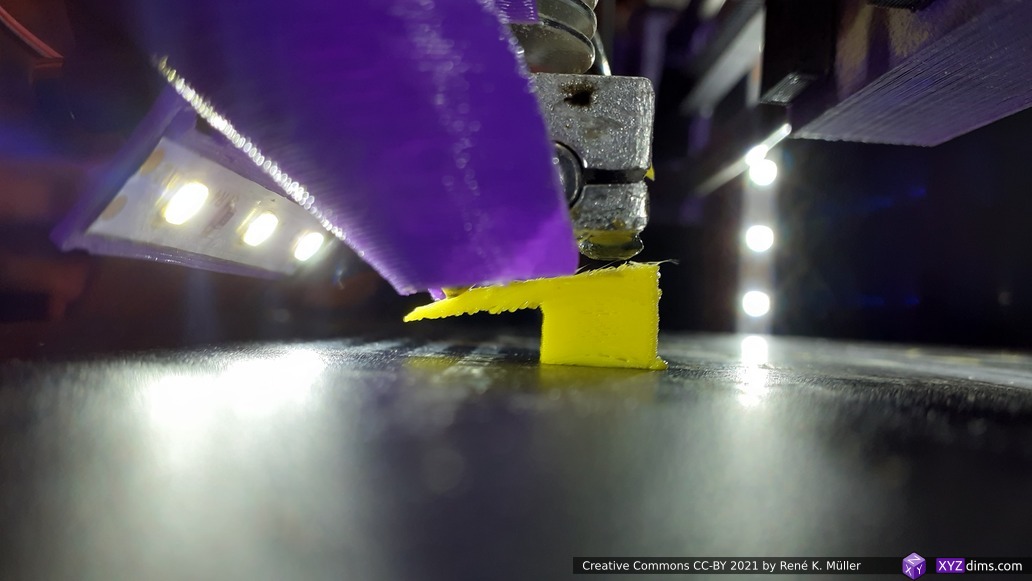
The print is still pretty ugly due to the obvious under-extrusion, but the geometry seems to work overall. The overhang on the left-front isn’t evenly, as the outer wall print speed is still too high.
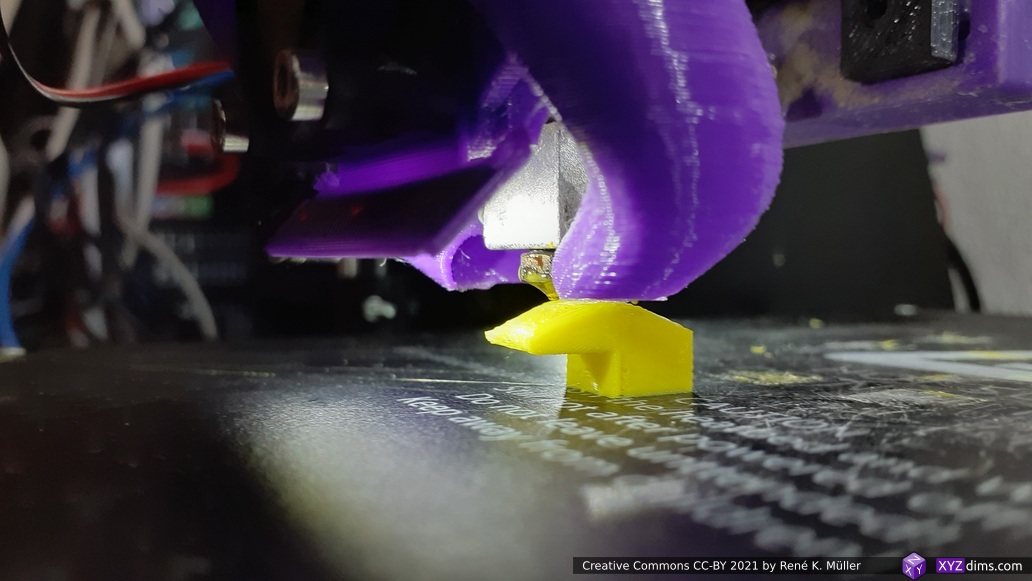
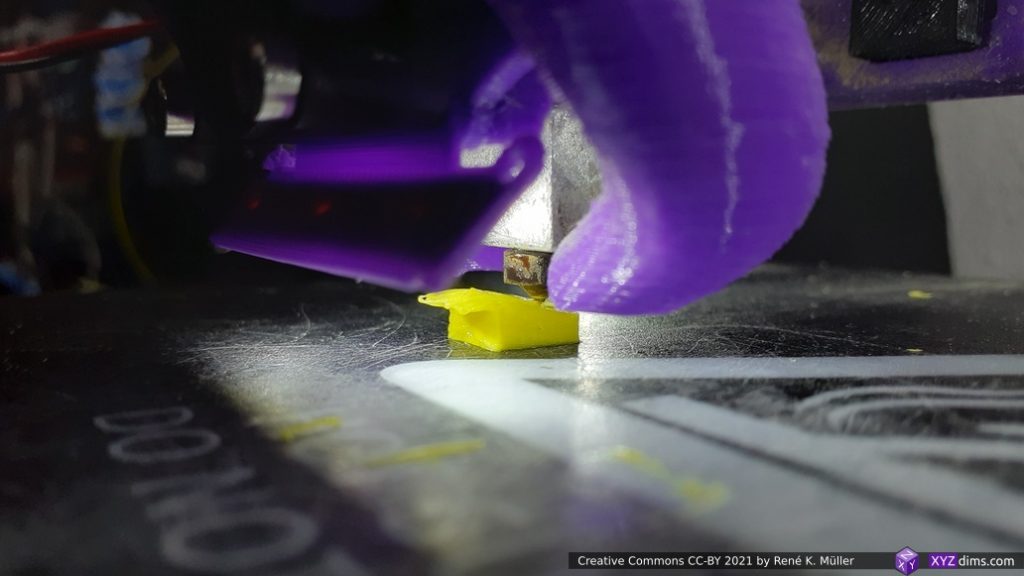
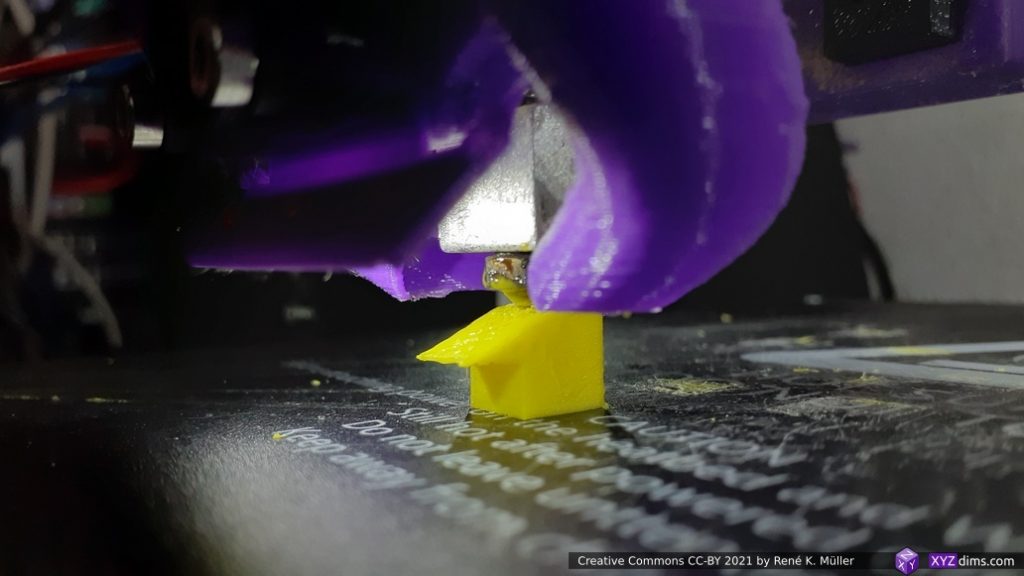
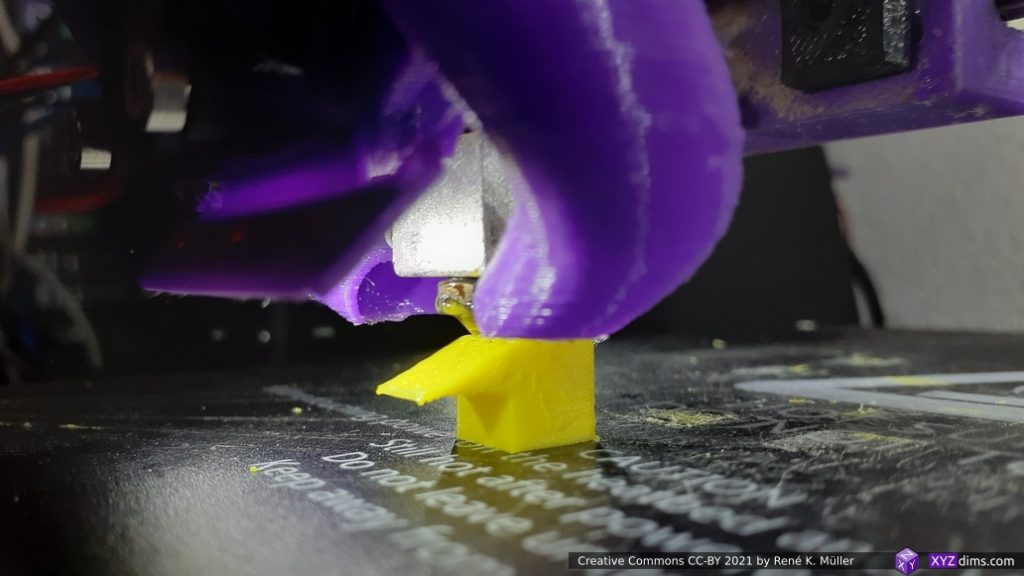
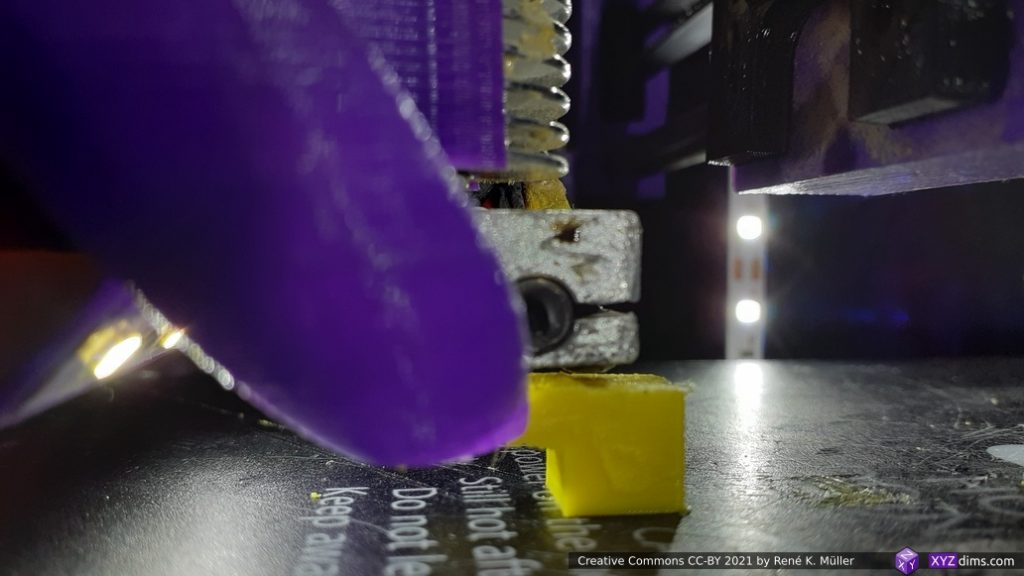
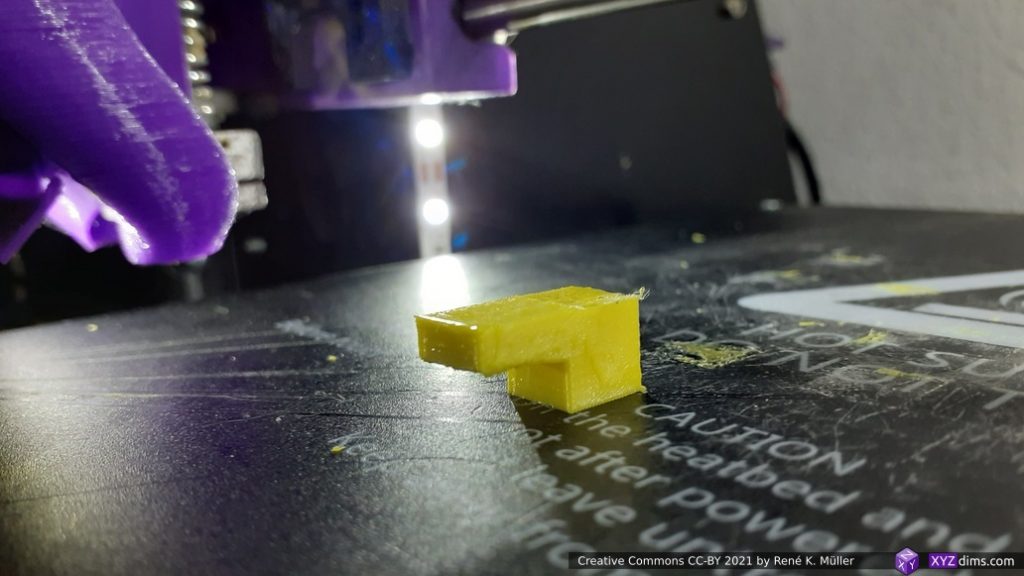
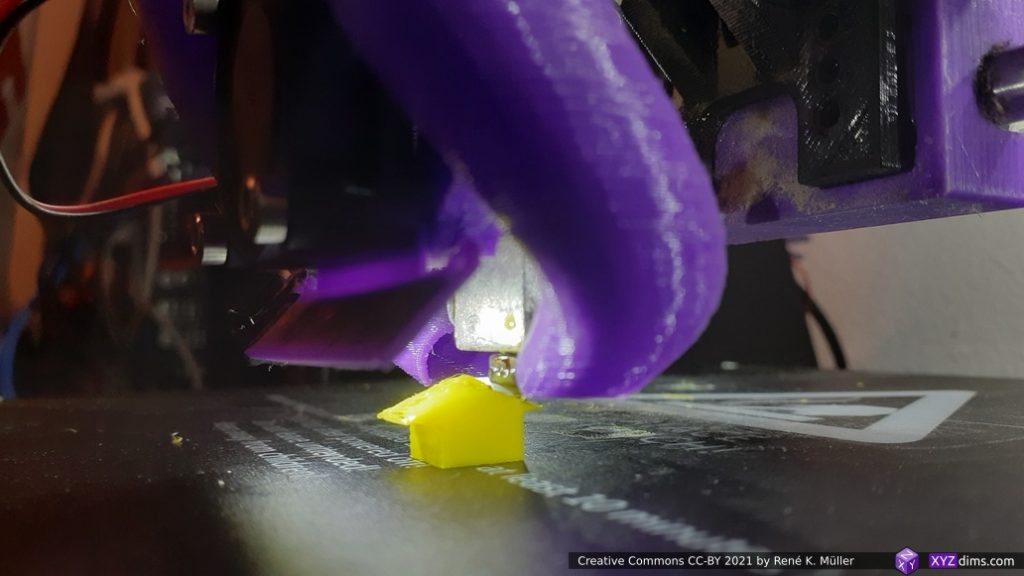
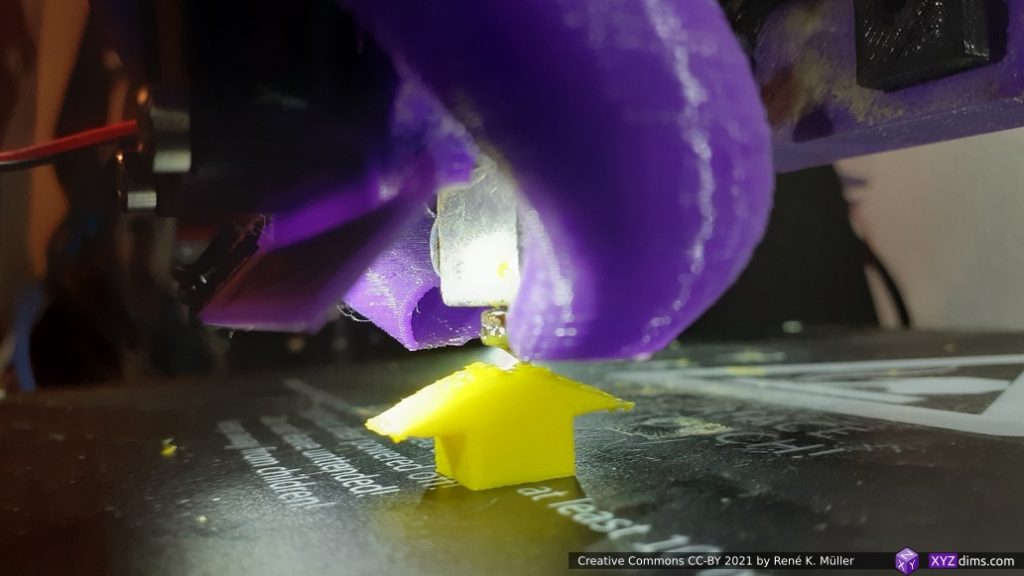
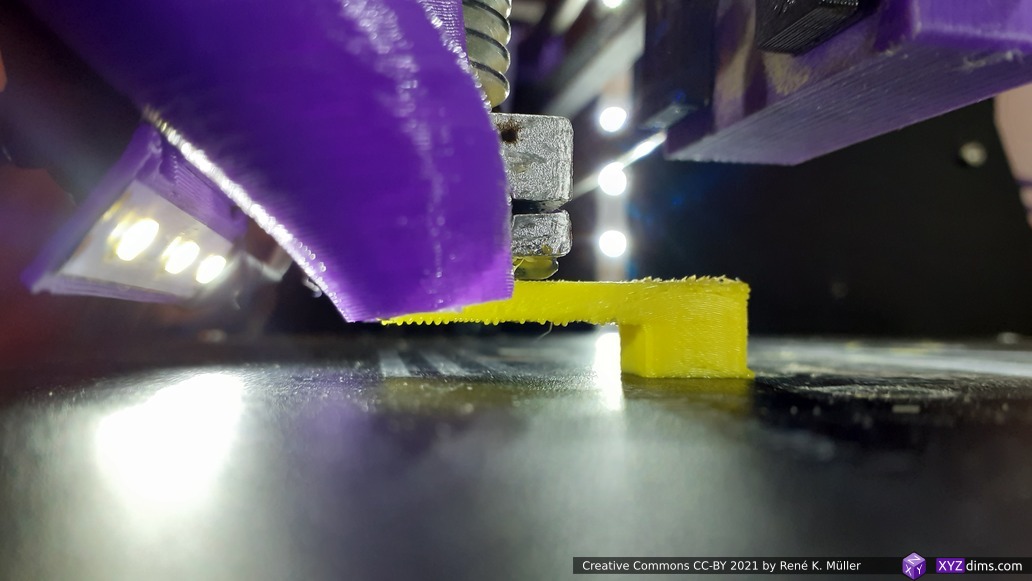
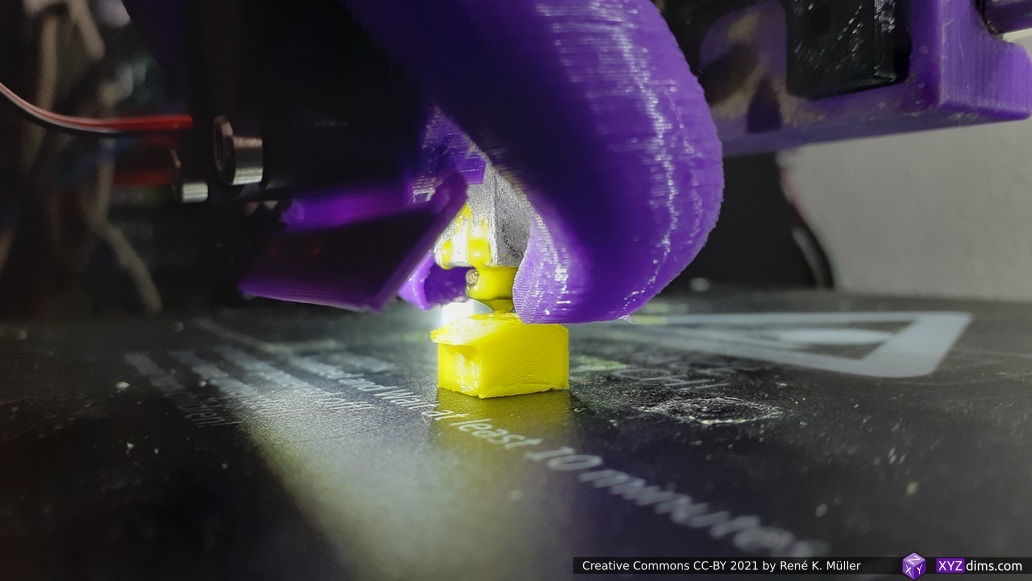
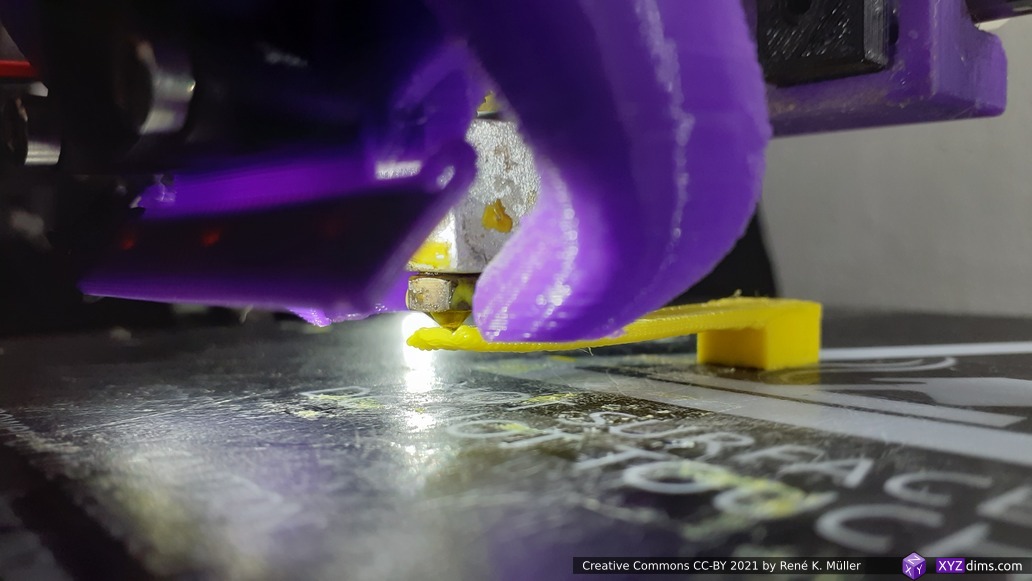
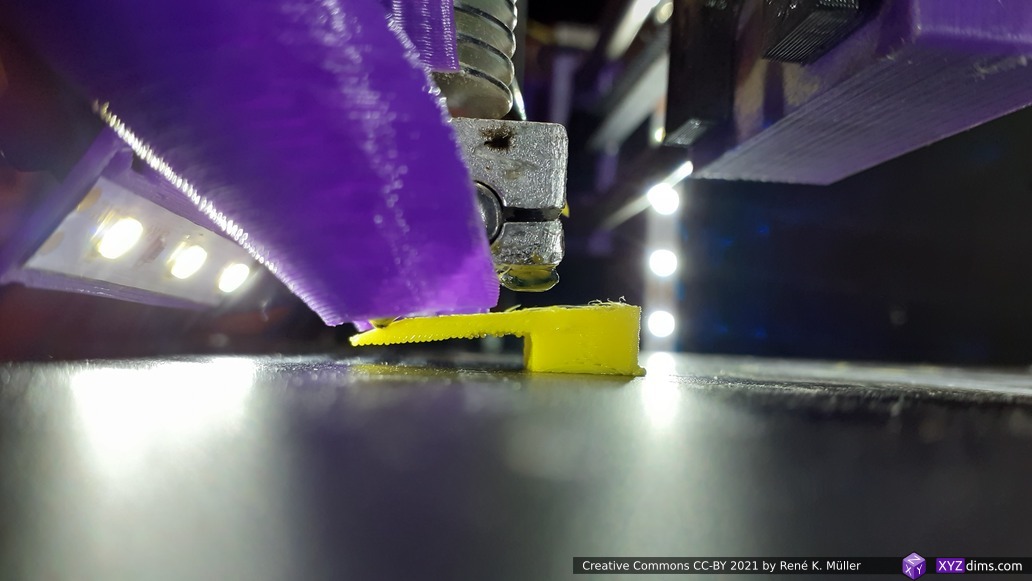
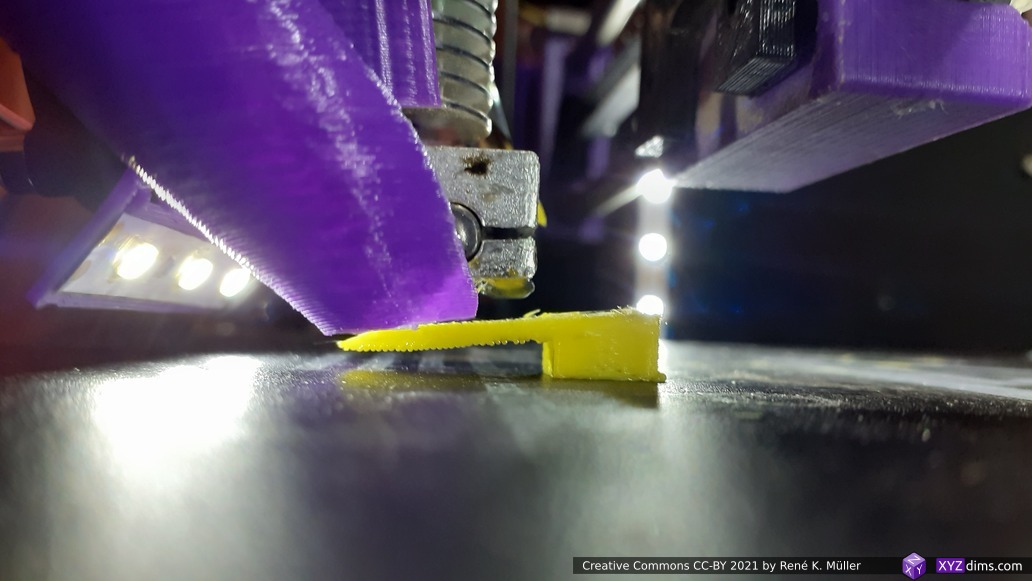
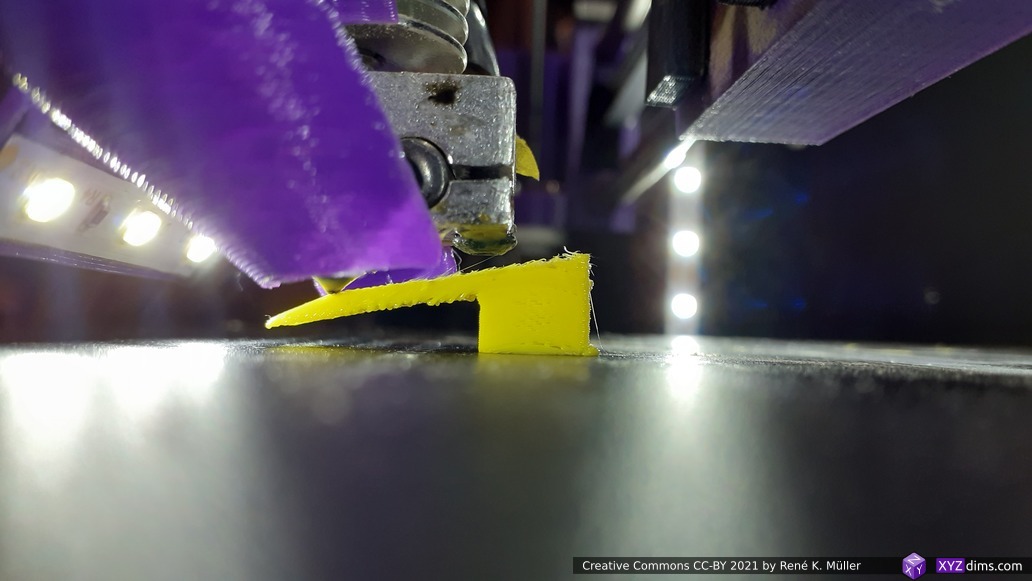
Tilted Slices
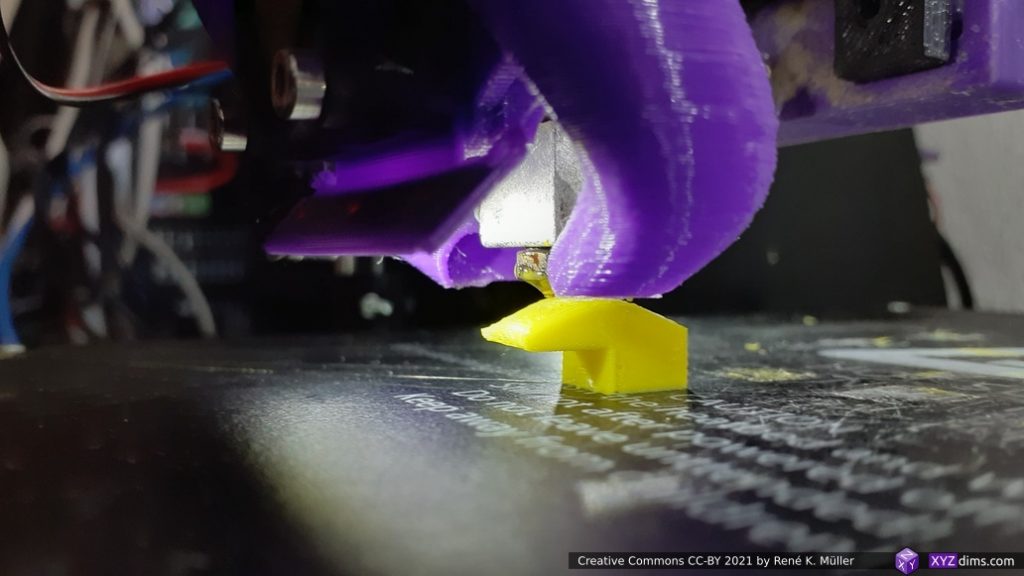
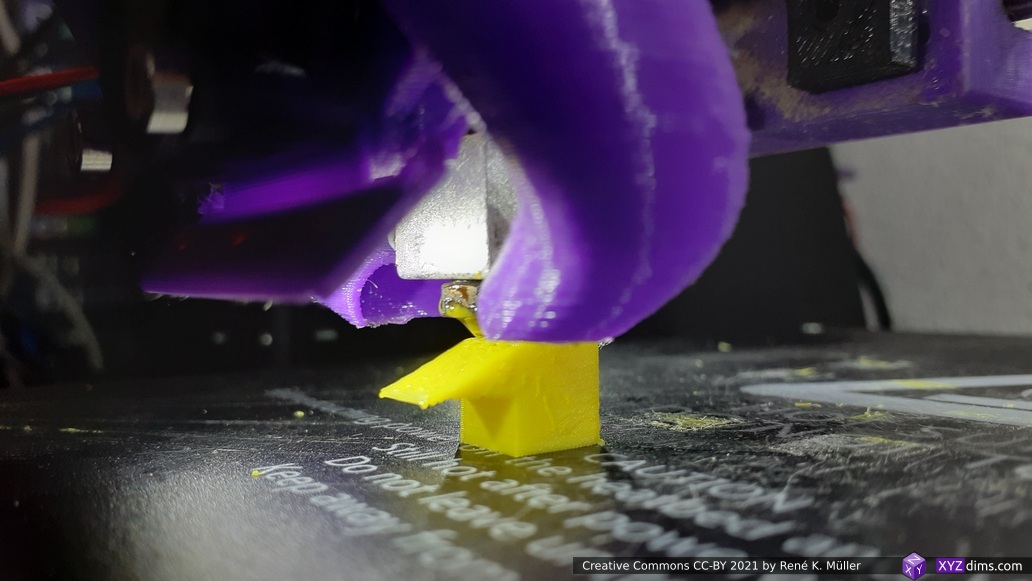
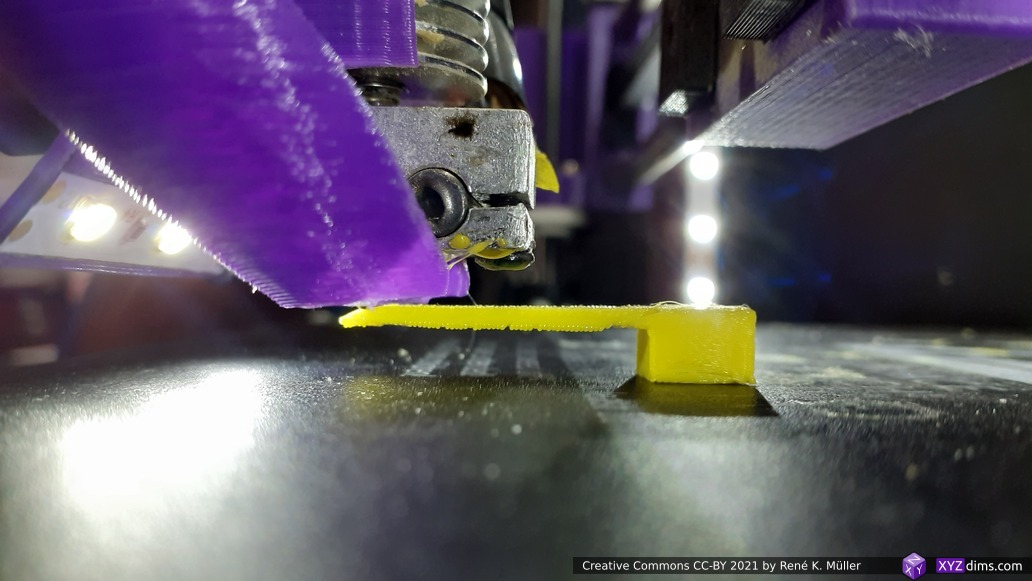
heatblock comes awfully close
Very clean print so far but the overhang is limited to one direction (see below of overall considerations).
Findings
Well,it works, but here are some limitations of using non-planar slicing:
more complex pieces need to be volume decomposed or segmented, e.g. some sub-volume sliced ordinary vertically Z-wise, others conic sliced where needed – this is part of my research on 4-axis and 5-axis printers; and I was hoping some of the findings can be applied to 3-axis 3D printer as well (as this post shows)
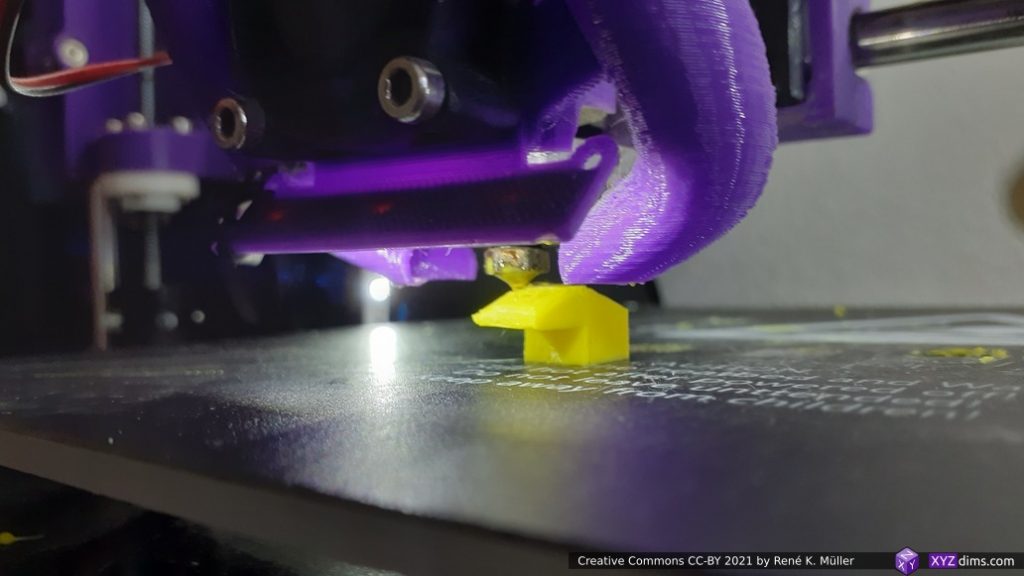
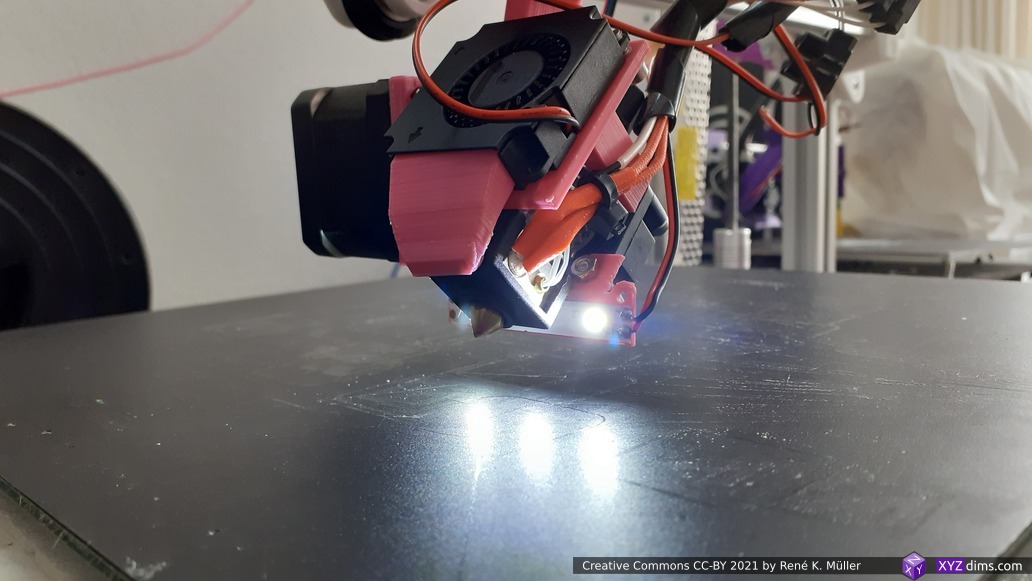
the printhead geometry with heatblock sock, part-cooler, LED light they quickly come into way with larger pieces and larger overhangs
this might look minor, but part coolers play significant role for quality prints, so they need to be optimized for non-planar printing
cone angle
15° works, sufficient space around the nozzle, but on the edge for overhangs, better surface quality
20° works better, layers more stable beneath the overhang
25° works too, but is the limit on my E3D V6 clone, poorer surface quality, but overhang prints better
print quality is sub-optiomal, as the nozzle runs over its own extruded filament and any “flat” surface becomes jittery as it’s not longer flat (toward Z) printed
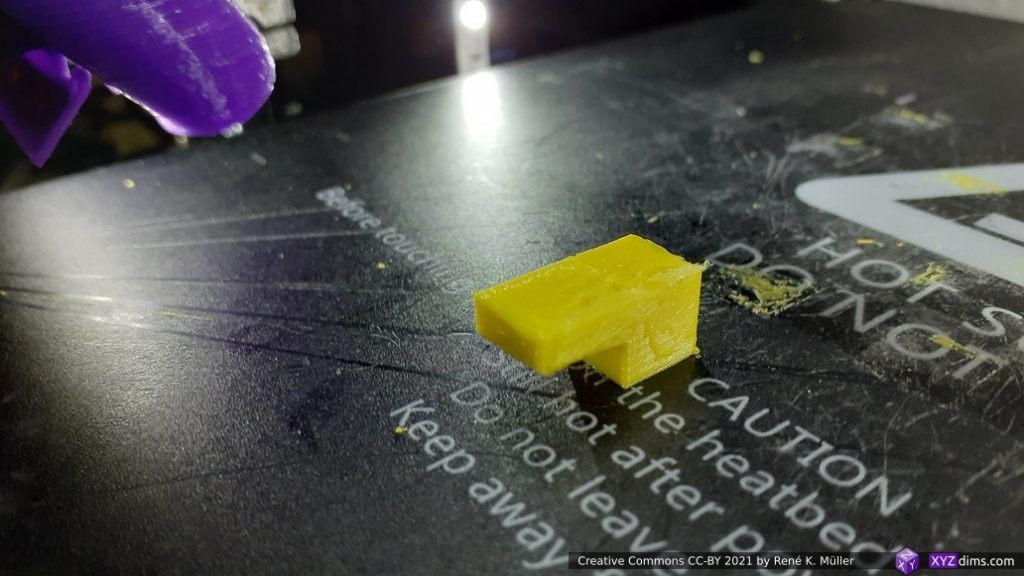
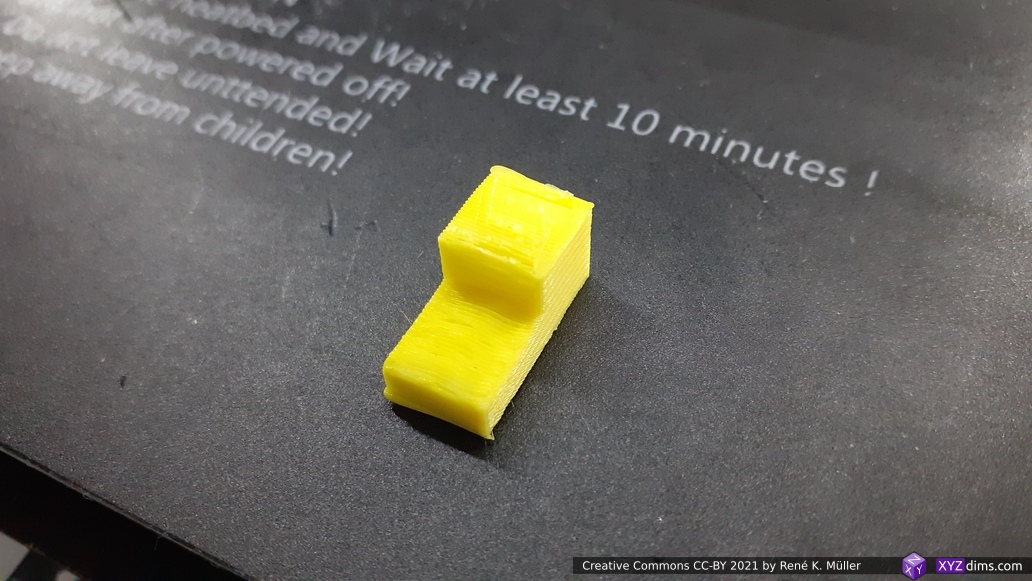
Tilted Slices
single direction angled slice like with belt-printer
only one direction overhang possible, but good quality
tilt angle:
25° works good, yet, the heatblock comes into the way rather quickly with my sample overhang model
Conic vs Tilted Slices
25° conic sliced overhang model
25° tilt sliced overhang model
Issues to Resolve
more tests
more beautiful prints
fine tune extrusion rate: the current slicer4rtn does a simple/poor interpolation causing rough top surfaces (under- vs overextrusion)
fine tune outer wall of overhangs, slow them down
--slicer.external-perimeter-speed=10% (Slic3r)
support more slicers
Slic3r: supported since slicer4rtn 0.0.1
Prusa Slicer: supported since slicer4rtn 0.1.2 (0.1.1 was broken) but often refuses to slice model, e.g. cube fails in inverted cone space
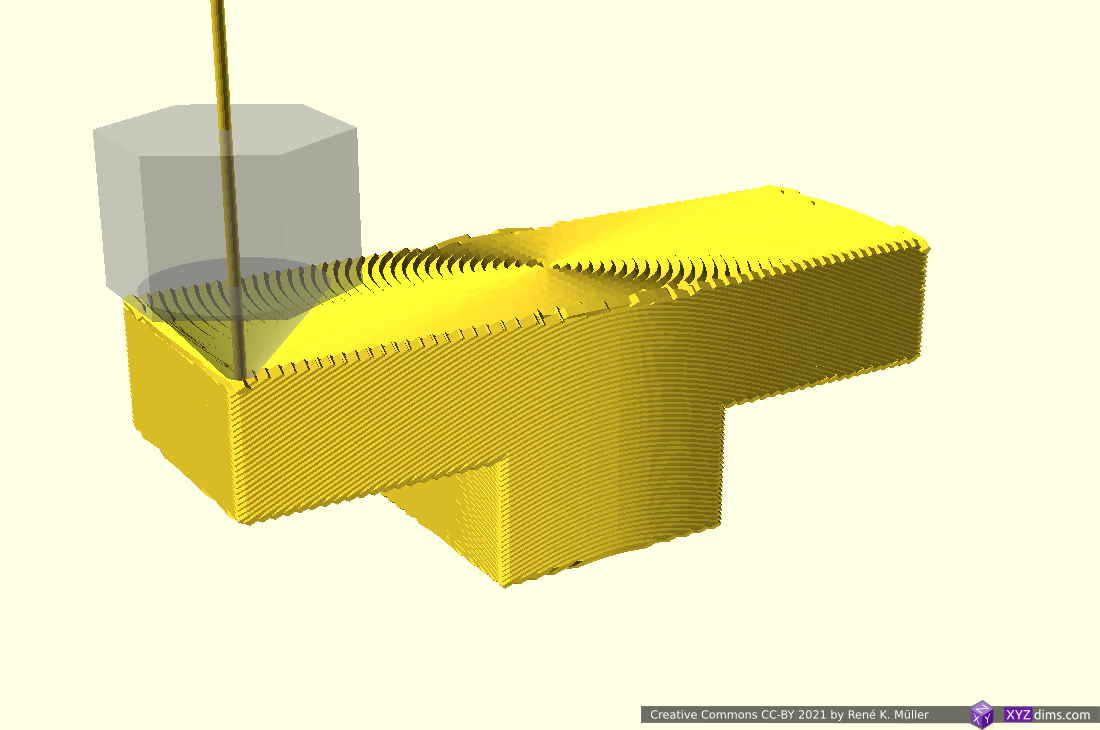
Trying out an overhang model which extends -Y and Y (as side-ways the part-cooler comes into the way)
There are still inconsistencies with extrusion calculation, but the prints getting cleaner.
4-sided overhang model nr 6 (conic sliced)
Sample print comes soon as I need to redesign my part cooler so I can print this piece.
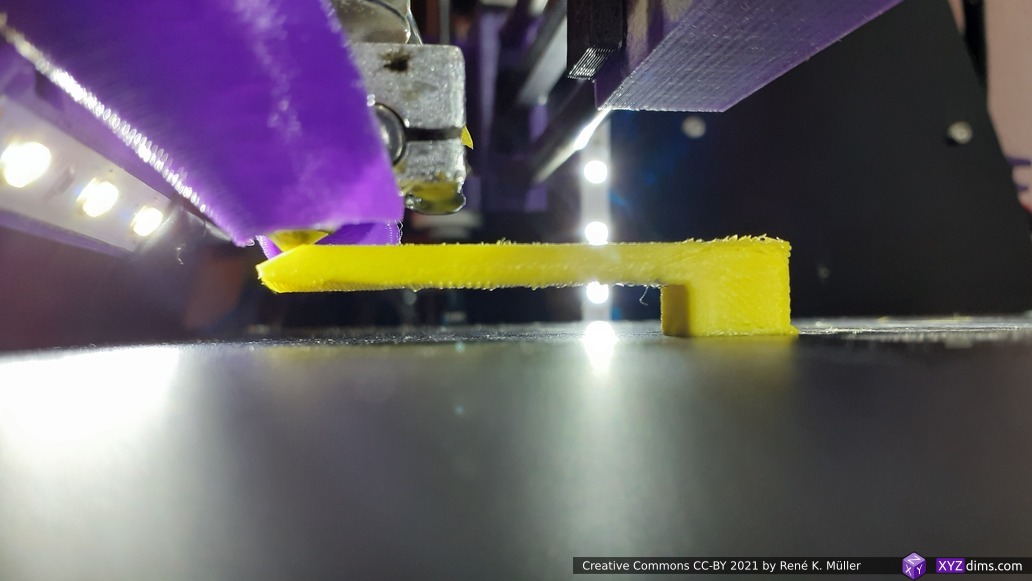
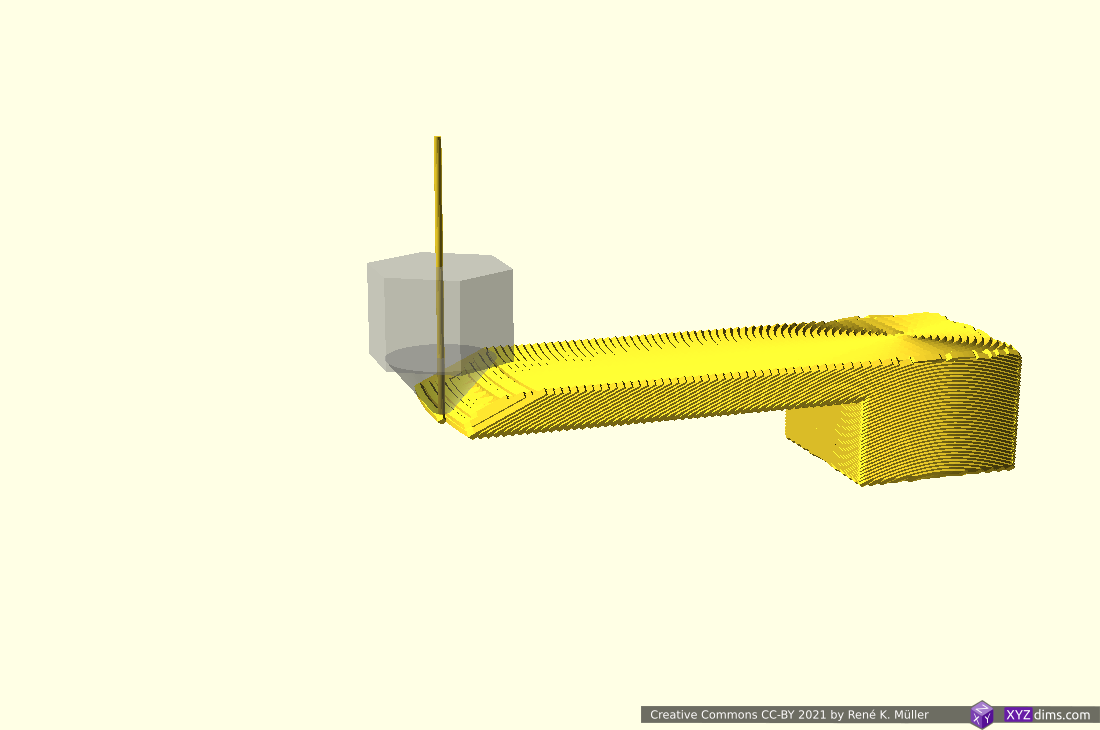
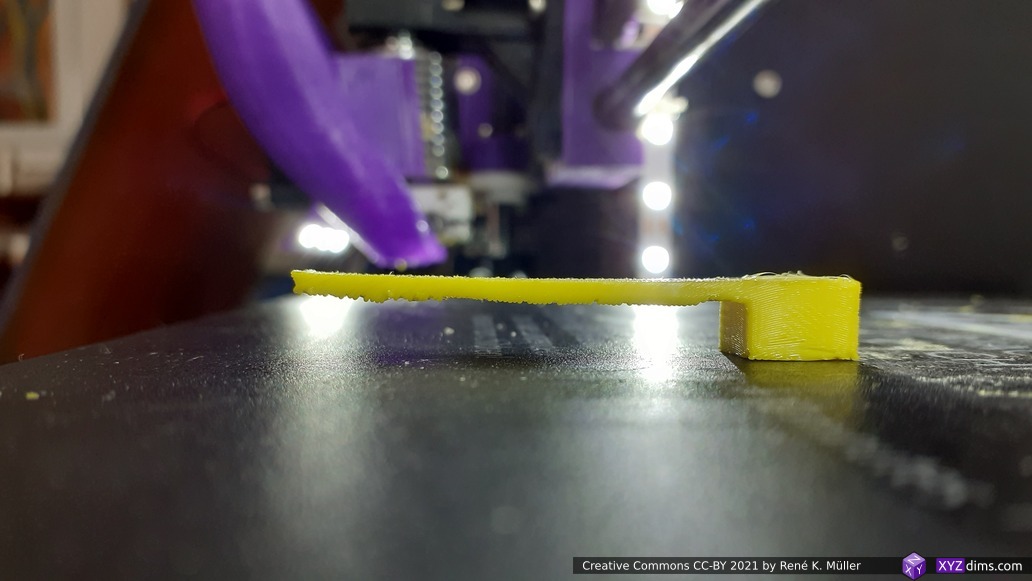
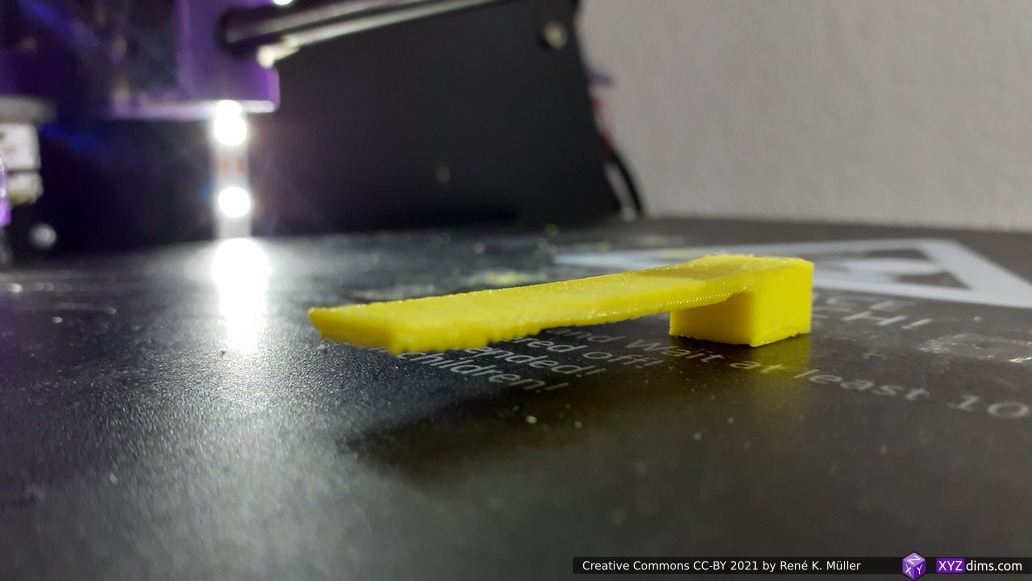
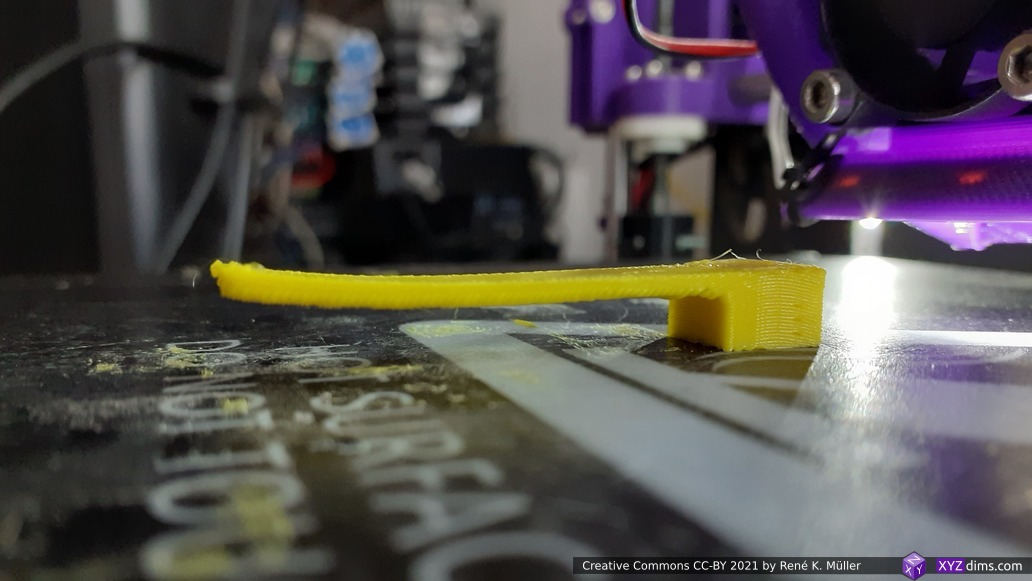
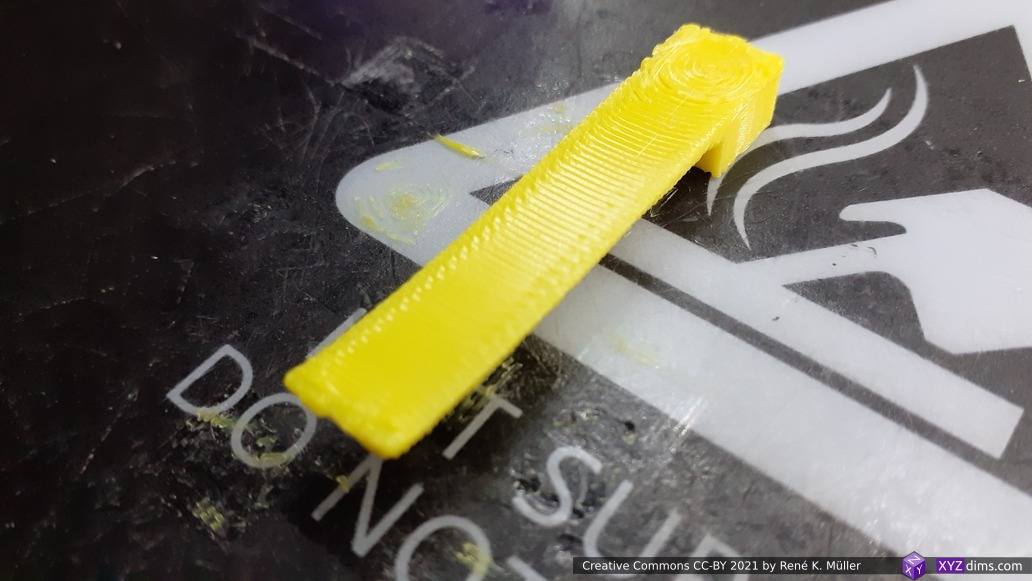
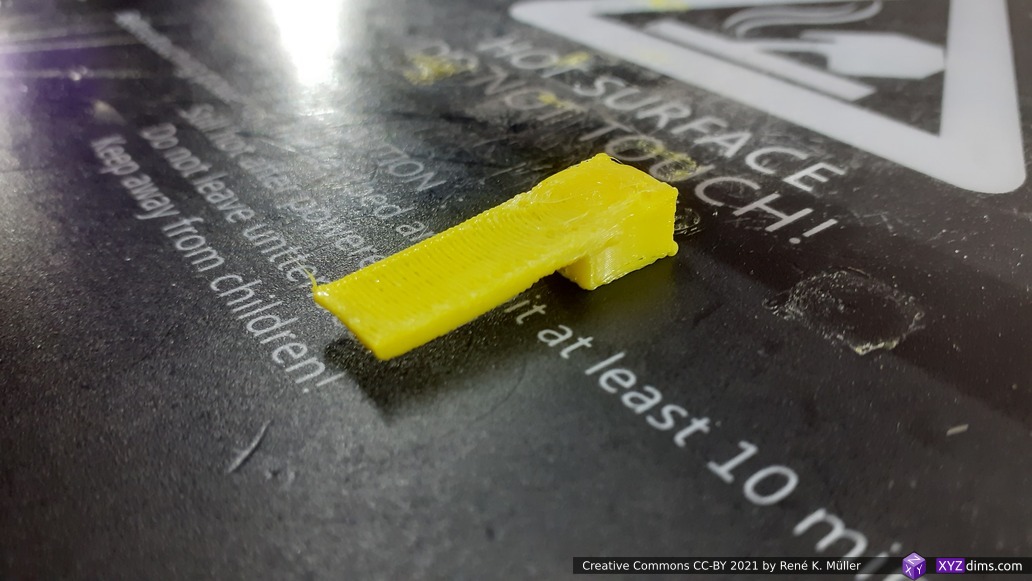
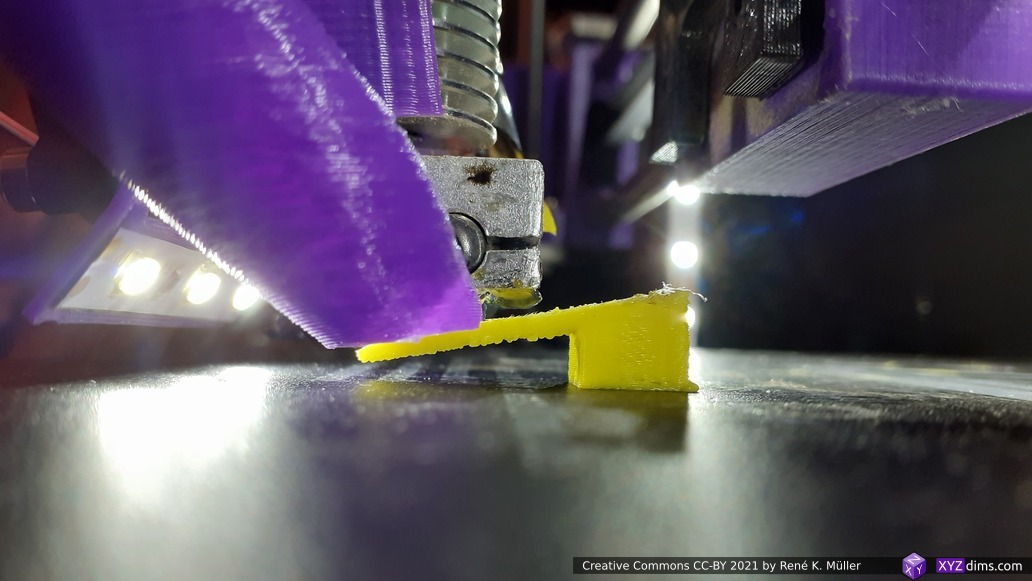
1-sided long 4mm thick overhang model nr 3 (conic sliced)
Long 40mm overhang, just 4mm thick extending nose . . .
a bit rough
a few layers definitely hang, overextrusion or lack of proper cooling
right front is missing some material, rough top of the foot at the back
X-wise OK
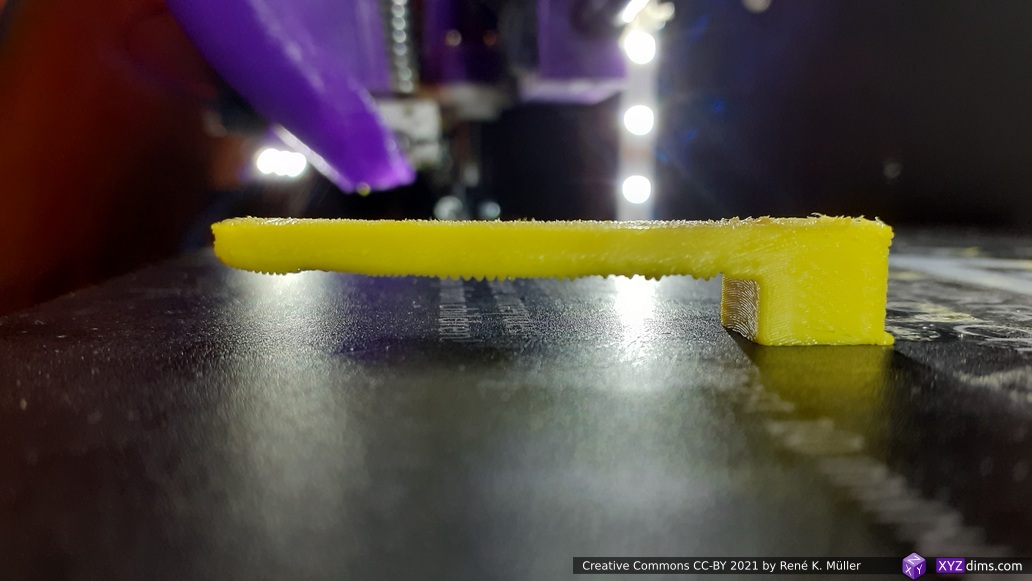
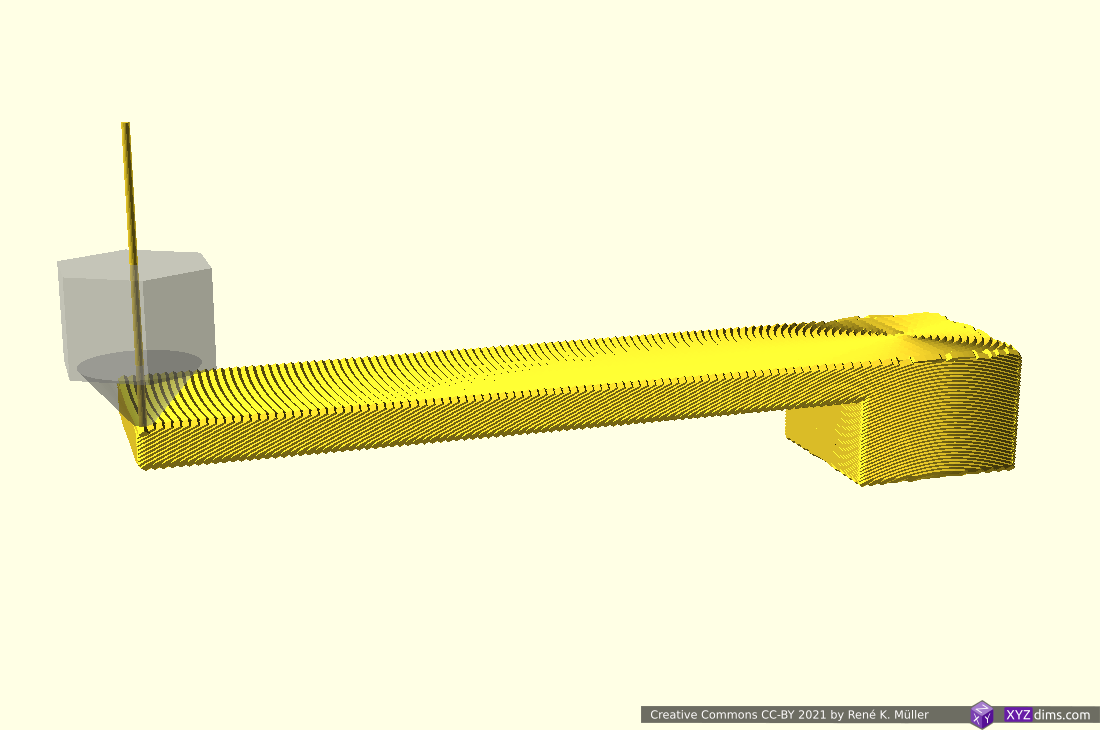
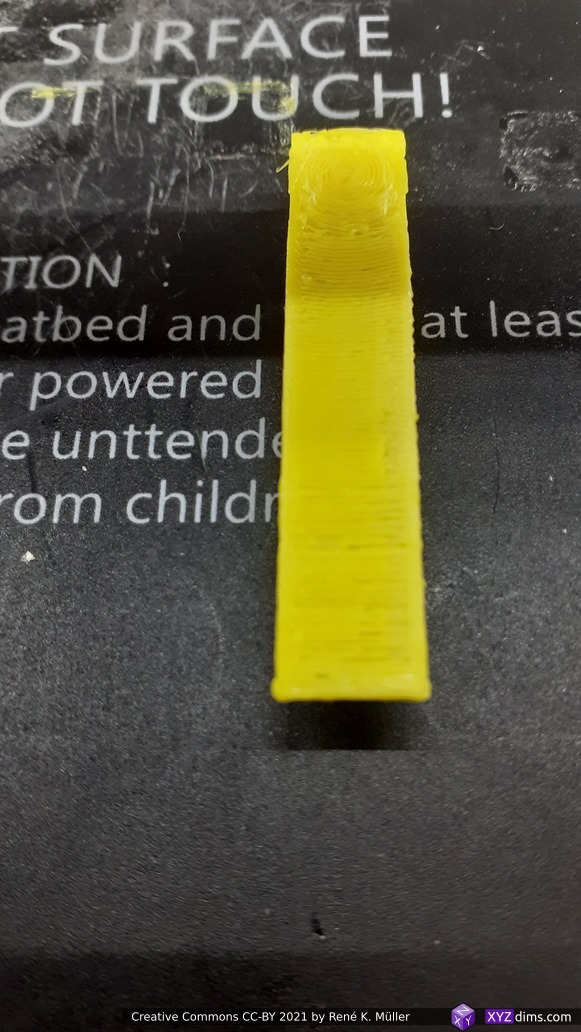
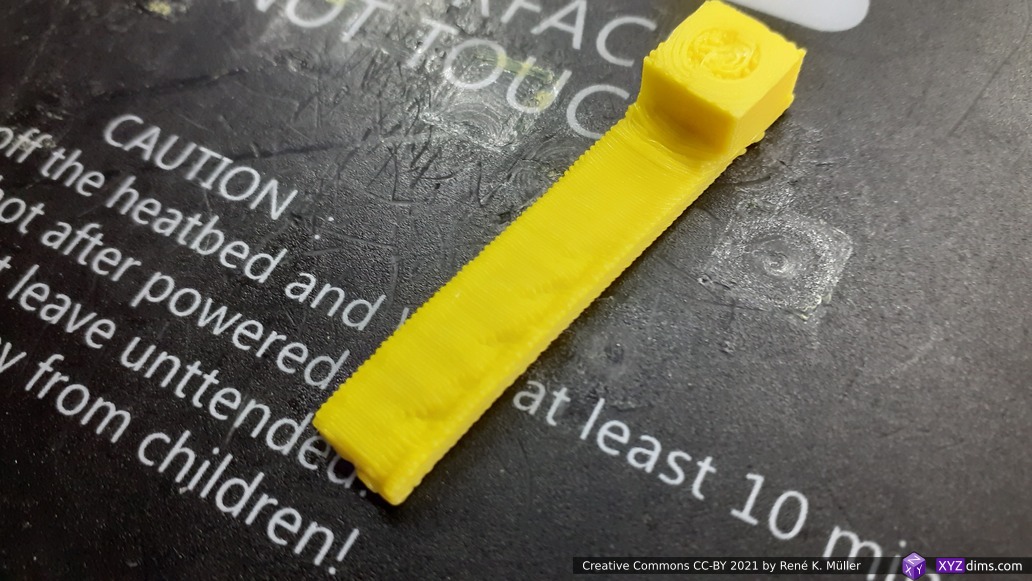
1-sided long 2mm thick overhang model nr 3 (conic sliced)
Long 40mm overhang, just 2mm thin extending nose, let’s push the limits of what’s possible:
good
still good
still good?
going good further
wow, it keeps staying good
the final bends a bit upward
last layers in front are OK but one sees the limit here
X-wise very good, surface of the foot is still rough
OK print so far, better than anticipated, but still a way to improve it. Reprint with a newer version of slicer4rtn (0.2.3):
in print
finished, bowed up, but thickness and print quality improved
surface is clean(er), smooth
underside is uneven, too fast printed (20mm/s)
better surface, no stringing anymore
faster print speed but also more geometric inconsistency like bending up
underside is more uneven but also cleaner than all the previous (pre- 0.2.0 of slicer4rtn)
1-sided short 2mm thick 95° overhang model nr 3 (conic sliced)
Just trying more overhang, let’s see.
good so far
looks good 95° overhang
still rough surface
Obviously there is more than 95° overhang possible, so let’s try …
1-sided short 2mm thick 100° overhang model nr 3 (conic sliced)
Even steeper overhang, let’s see.
it’s actually seems to still work
a bit rough at the beginning of the overhang
good so far
can’t believe this works
just wow, 100° overhang
rough surface
This is truly promising, up to 100° overhangs printable with vertical nozzle as mounted on most 3-axis 3D printers . . .
95° overhang
100° overhang
Slicer4RTN Settings
As of the publication of this blog-post (2021/03) no slicer is available but slicer4rtnwill be made available soon which was released 2021/03/22.
Caution: you need to be an experienced 3D printing enthusiast to proceed, you need to know and realize what you do:
pay close attention of the printhead geometry, such as the nozzle and heatblock, and the part cooler which limits the non-planar printing
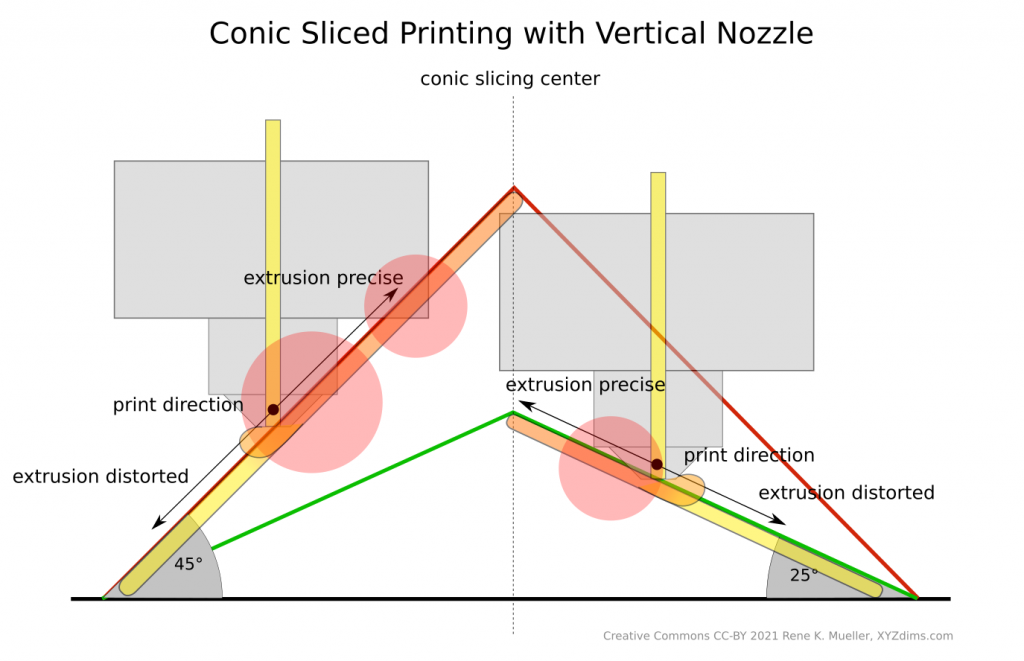
depending on the angle, and the direction of extrusion more or less extrusion distortion will occur
Issues to look at when printing conic sliced models with vertical nozzle on a 3-axis 3D printer
--angle=20 is a good start, you may go as low as 15°, and perhaps at max at 30° depending on your nozzle and heatblock, if you aim to print 90° overhangs
--layer-height=0.2 is a good start too, the thinner the layers the better overhangs can be printed
if you have trouble with over- or under-extrusion and your printer otherwise well tuned, then use --erate=f as extrusion-rate tuning, whereas f = 0.5..1.5 or so, if you have to go below or above, something else is wrong.
conic slicing is complex(er), you need to think in new terms:
the slicing procedure requires a conic slicing center
to and from that center overhangs can be printed well
if you have multiple centers, slicer4rtn does not yet support volume segmenting to support multiple centers
slicer4rtn requires manually entered conic slicing center
it requires fine-grained faces so the slicing works well, use --subdivide=5 or higher for simple pieces, e.g. like a cube or low-poly models in generals
Tuning 3-axis 3D Printer
Following changes are recommended:
increase Z axis speed: within the start G-code the line M203 Z.. (replace .. with an actual number) to increase speed of Z-axis
depending on the pitch of your Z-lead screw or threaded rods, you may set it to Z4, Z6, or higher, so the motion speed comes close to X- and Y-axis to improve print quality
if it’s set too high, your stepper motor will block and not move at all
my setup with M6 threaded rod for Z (200 full steps = 1mm):
State: early draft, mostly simulations with a few tests with 3-axis printer only
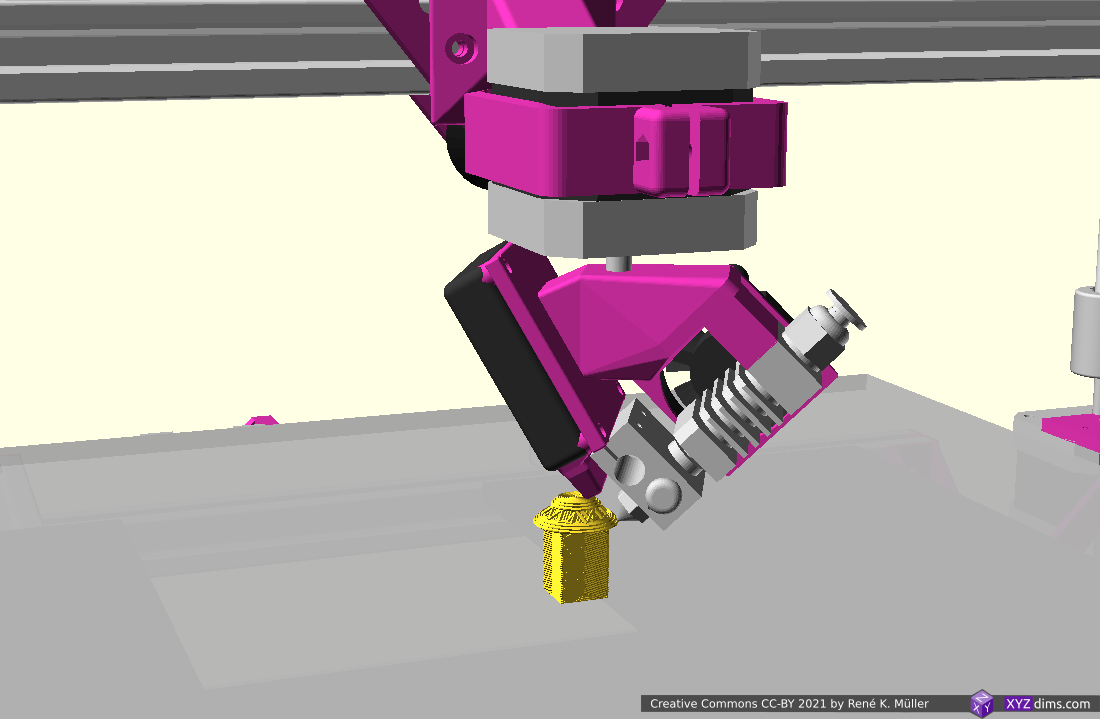
Conic sliced overhang model with two overhangs, printing with Rotating Tilted Nozzle (RTN) 90° overhang structure without support structure
Updates:
2021/09/28: added reference to paper by ZHAW describing slicing procedure
2021/03/22: slicer4rtn released, see dedicated page Slicer4RTN
2021/03/16: removing details on slicer4rtn as a new dedicated page is in the working (coming soon)
2021/03/08: slicer4rtn 0.2.3 reached (still unreleased), better prints, documenting various settings in more details
2021/03/05: added proper ZHAW reference in the introduction and a few notes
2021/02/27: removed some redundant illustrations and remade some of them, outside-cone vs inside-cone mode & printing
2021/02/26: added inside-cone printing example for inner overhang mode, also early information of slicer4rtn; more animations to observe details of produced G-code, using now also OpenSCAD to simulate G-code and actual nozzle position
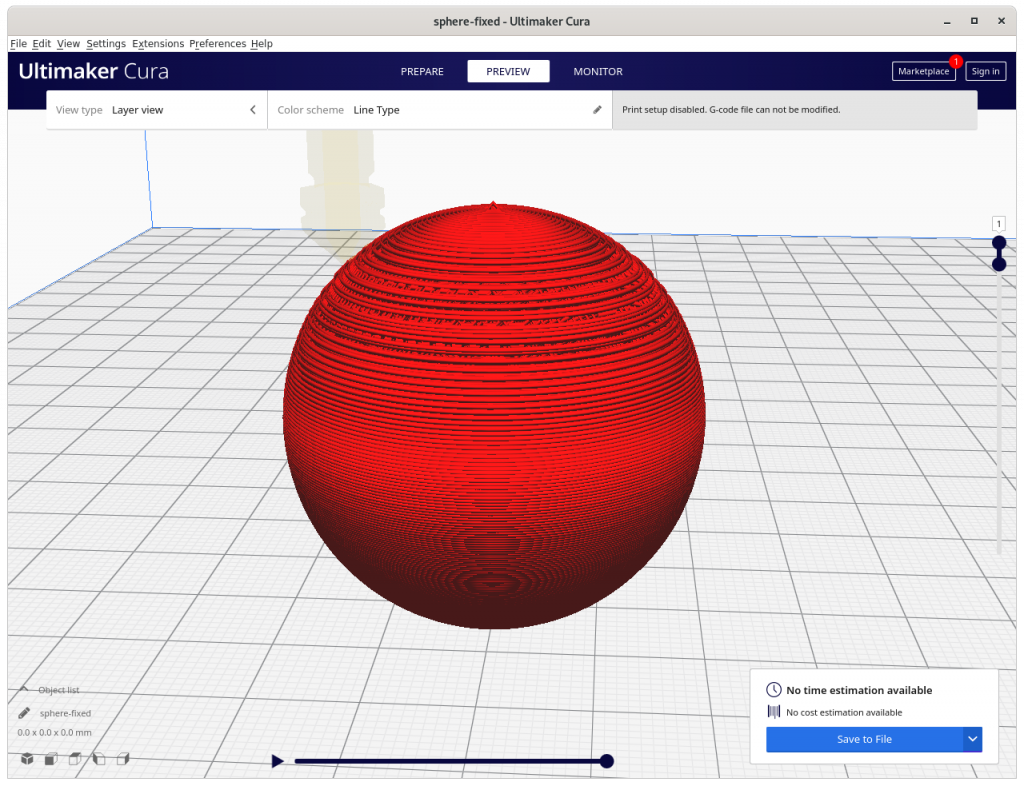
2021/02/24: better tests with 20mm cube and overhang structure, included two short G-code simulations as videos, added 20mm sphere and 3D Benchy and discover first issues with volume decomposition and overhang recognition
2021/02/23: first write up, pseudo code and first attempt to conic slice 20mm cube
As I progress I will update this blog-post.
Introduction
The main idea is to utilize existing 3D printing slicers but create conic slices for the Rotating Tilted Nozzle (RTN) 4 Axis Printer. ZHAW published in their announcement in 2021/01 something about utilizing existing slicers, but the details remained concealed and later published as a paper but I did not want to wait and pondered on the problem, and came up with a solution. In its current state it’s purely theoretical and untested for now (2021/02)barely tested yet.
Michael Wüthrich confirmed my solution is comparable with their solution. ZHAW planned their paper to be published sometime 2021. So, the main credit goes to ZHAW and the researchers (Prof. Dr. Wilfried Elspass, Dr. Christian Jaeger, Michael Wüthrich, Maurus Gubser, Philip Bos and Simon Holdener) there, I was just impatient and tried to find a solution with the information available.
The 4-axis Rotating Tilted Nozzle (RTN) physical setup implies its slices are of non-planar conic shape, allowing to print overhangs without support structure, such as:
Conic slices of an overhang model
I also like to master the conic slices properly as they promise to become a subset of 5 axis printhead (PAX) features too – so it’s worth the effort even if the RTN itself might be too limited in its application with its fixed tilt – we will see.
function conicSpaceMapping(cx,cy,x,y,z,dir='direct') {
dx = x-cx;
dy = y-cy;
d = sqrt(dx*dx + dy*dy);
rot = atan2(dy,dx);
return (x,y,dir=="direct" ? z-d : z+d,rot);
}
Pseudo-Code
The entire procedure goes like this:
m = loadModel("cube.stl");
m = subDivide(m,5);
for(p of m.vertices) {
m.vertices[i] = conicSpaceMapping(cx,cy,p.x,p.y,p.z,'inverse');
i++;
}
gcode = sliceModel(m);
foreach(line of gcode) {
(code,x,y,z,e) = extractCoordsExtrusion(line);
(x1,y1,z1,zrot) = conicSpaceMapping(cx,cy,x,y,z,'direct');
outputGcode(code,x1,y1,z1,e,zrot);
}
Note: the pseuco-code is incomplete as extrusion E is not yet taken care of, as soon I found a definitive solution I will write it up.
Examples
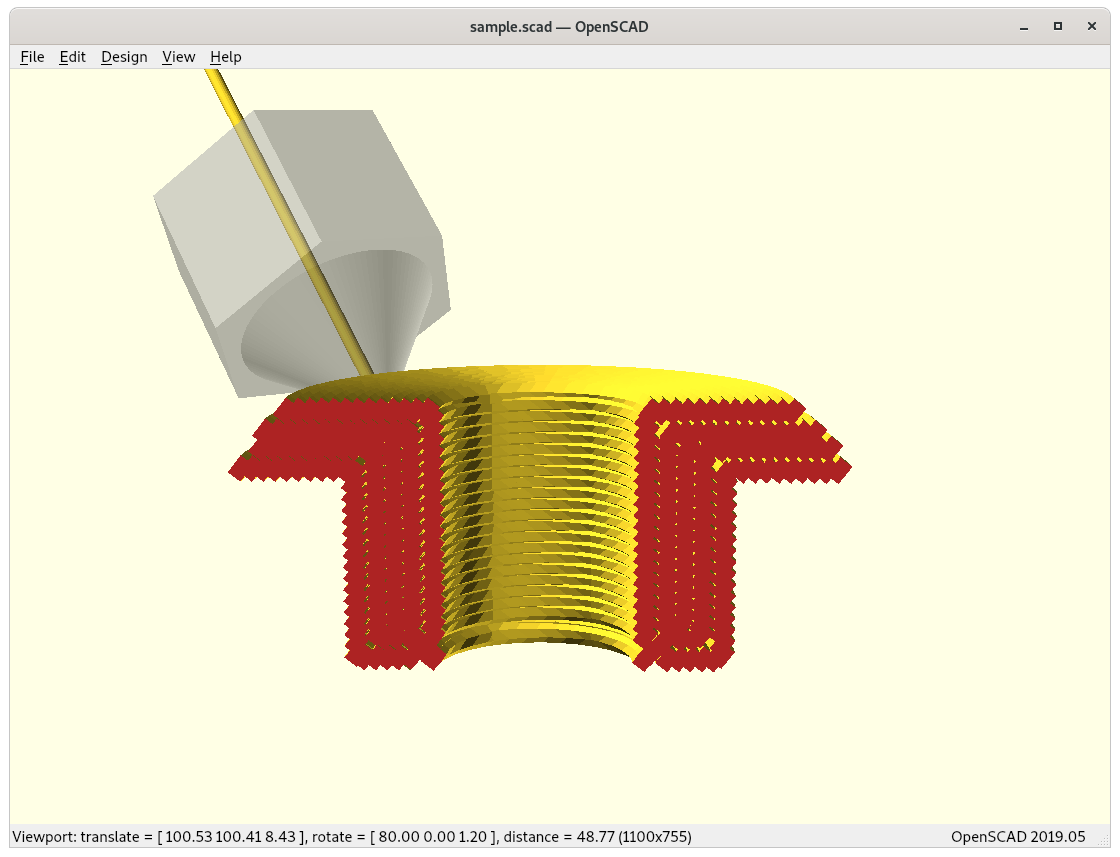
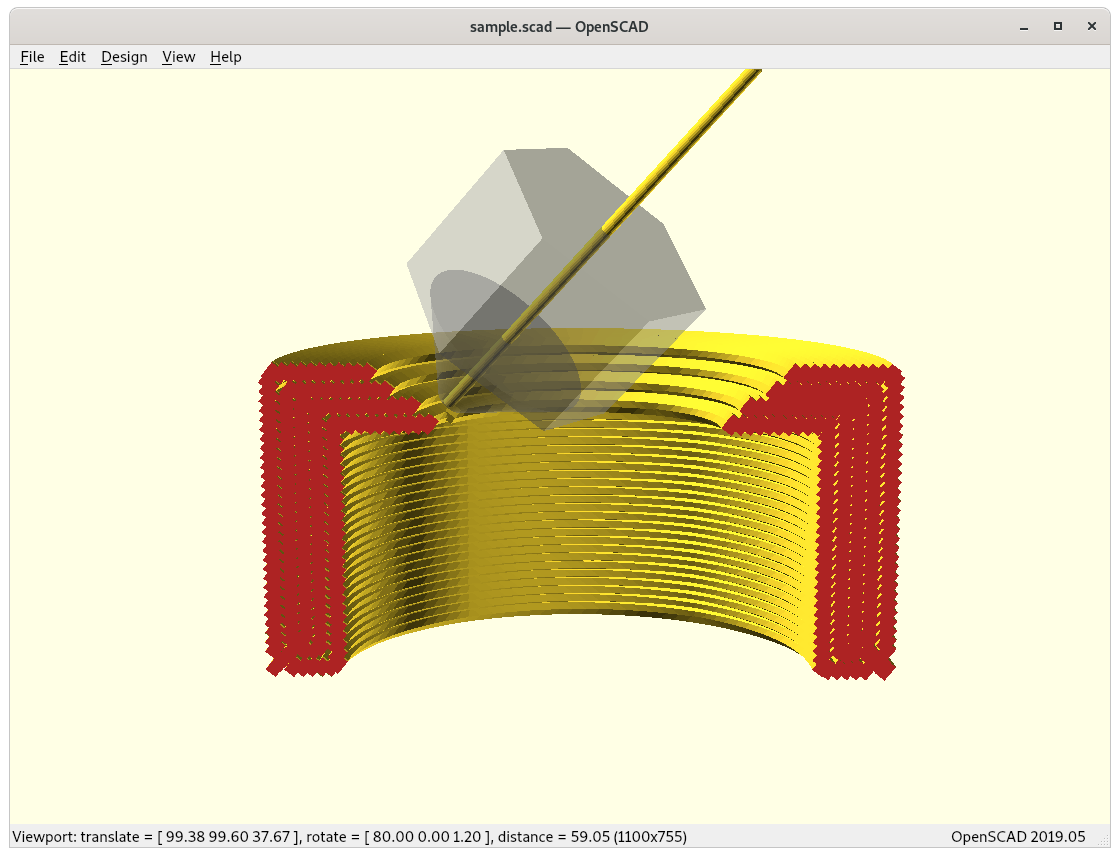
I implemented the pseudo-code with some more details like taking care of G-code E extrusion as well and fine-step linear extrusion – here some early tests using OpenSCAD as STL & G-code viewer and Slic3r as actual slicer:
find good pre-processing face sub-division strategy
in its current form the algorithm requires fine-grained sub-divided faces otherwise inaccurate G-code is created which cannot be recovered
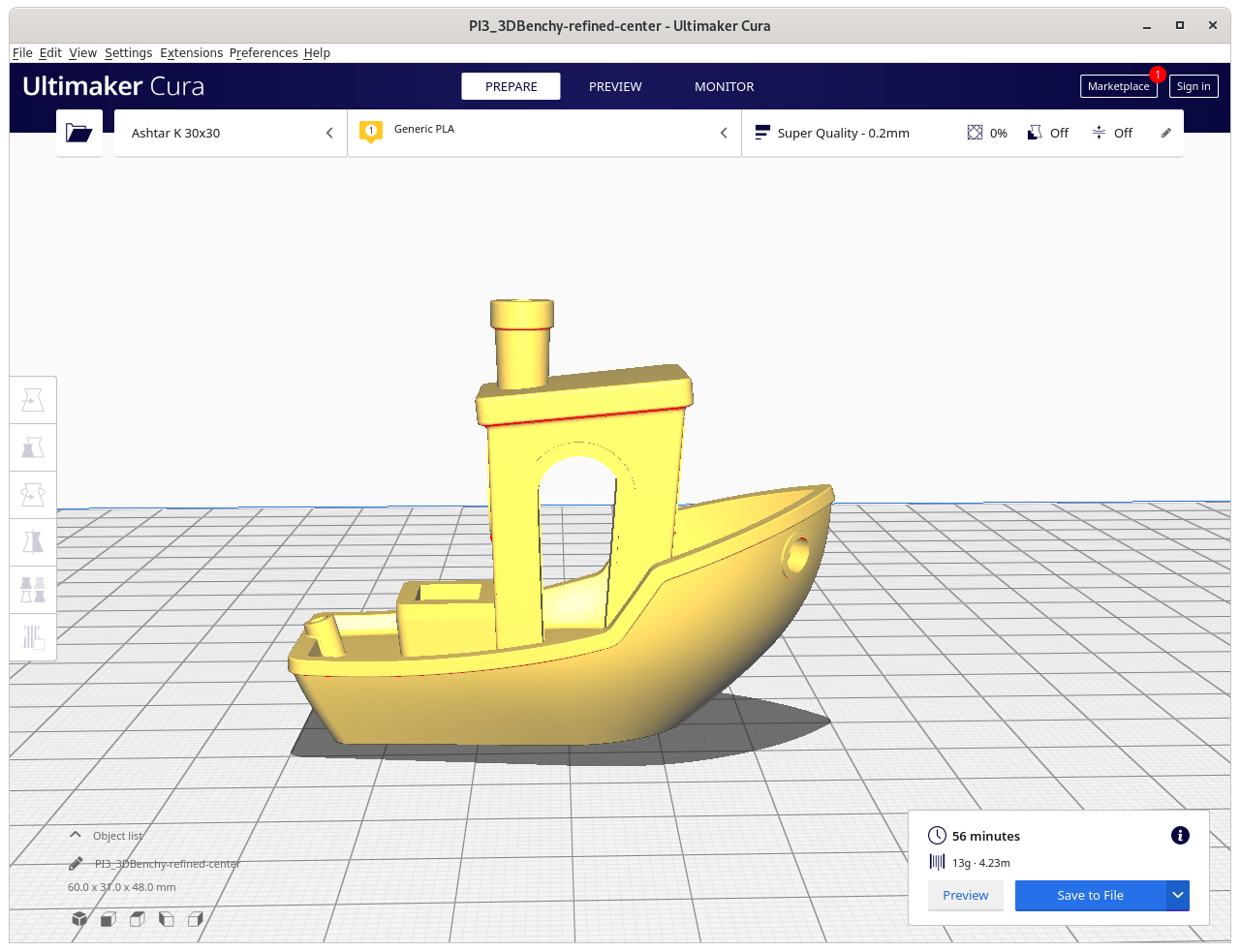
3D Benchy conic sliced with Original Faces
3D Benchy conic sliced with Refined Faces
slice more complex parts
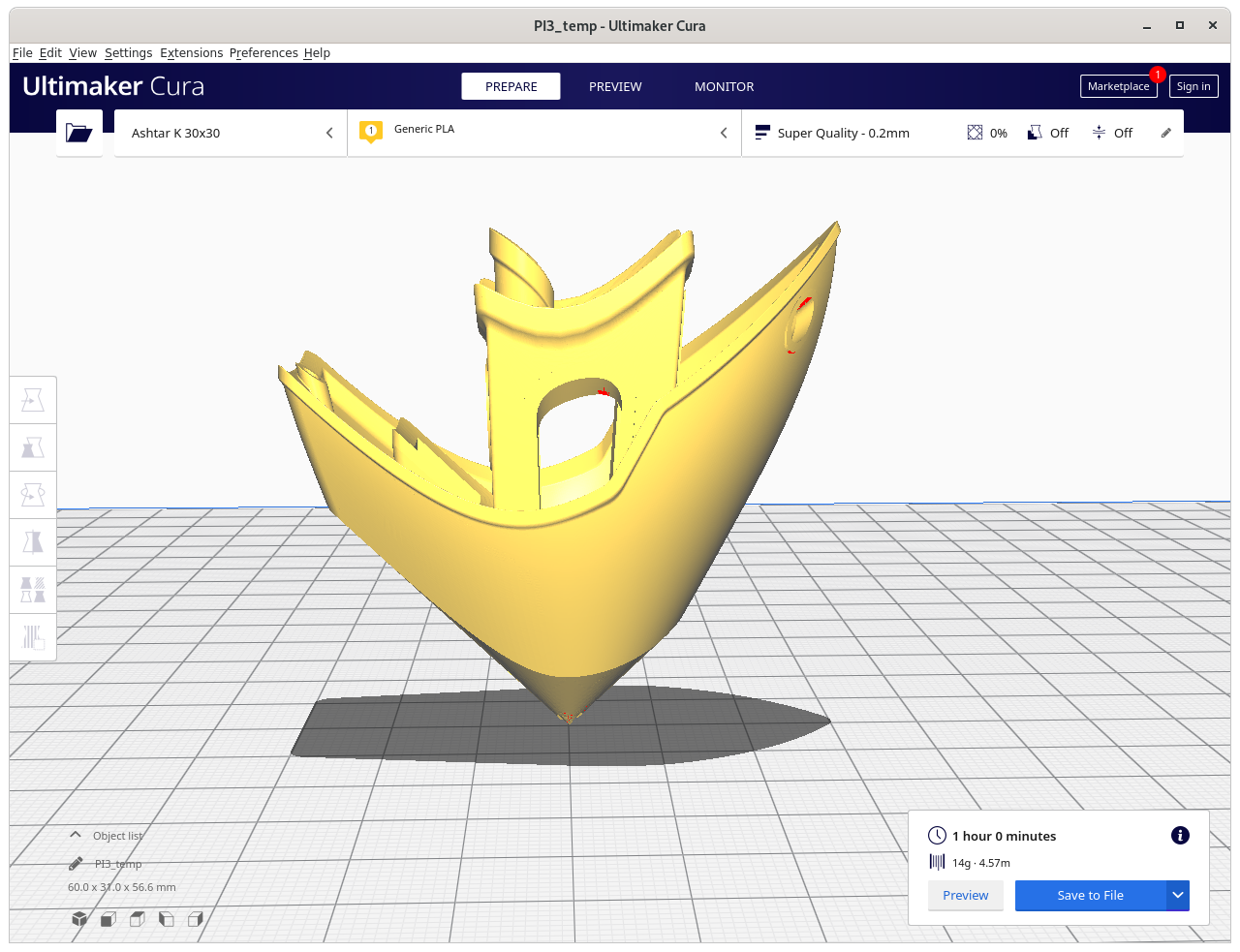
3D Benchy: requires more thorough examination, e.g. volume decomposition to segment roof apart:
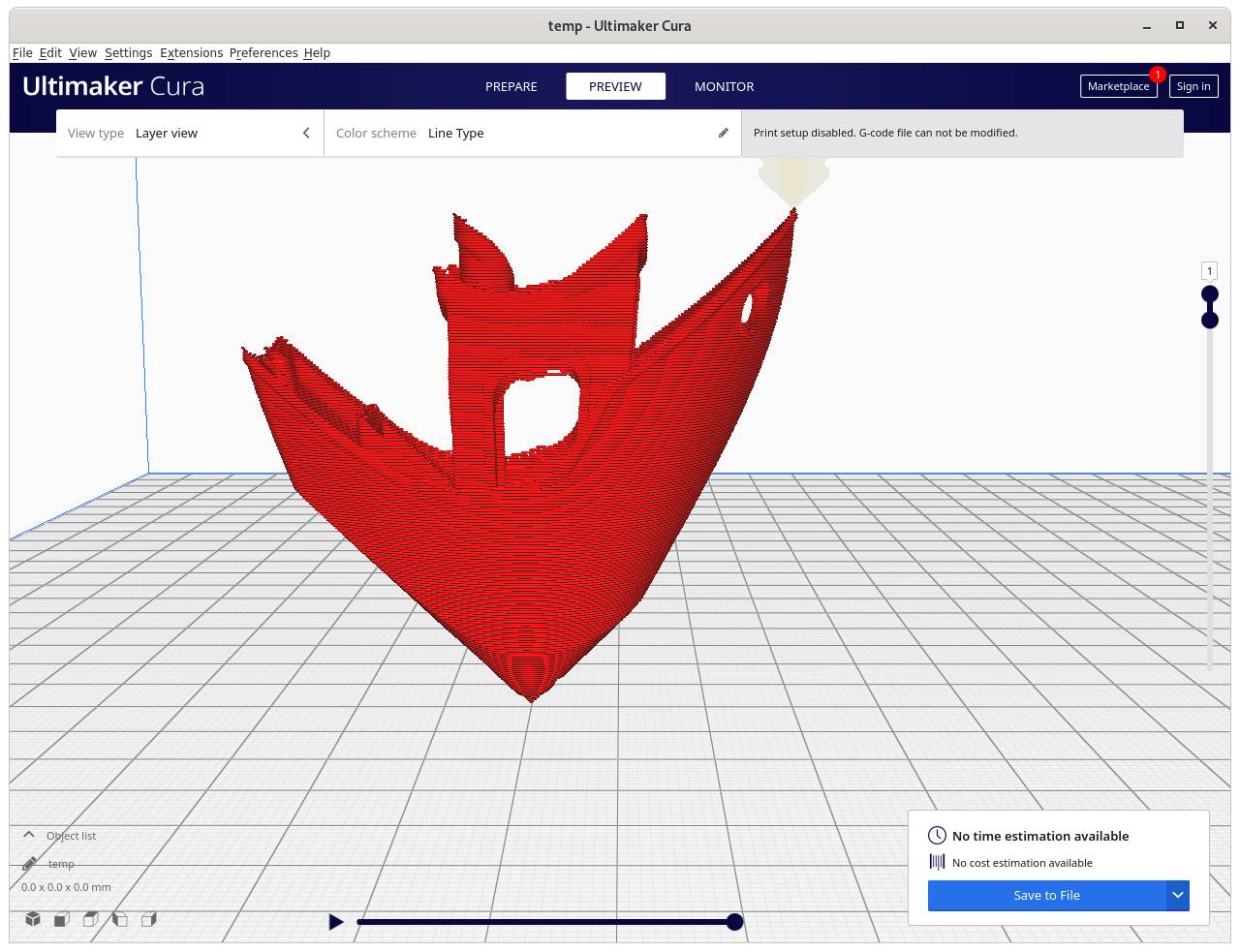
Impossible printing: current conic slicing needs to recognize overhangs and apply volume decomposition to choose right strategies – otherwise new issues arise which in Z planar slicing do not exist
Same G-code position of the Inverse Conic sliced model: > 90° overhang created, and causes in-air structure – might require actual support structure (!!), volume decomposition required
document all details
release source code to public
Close-Ups
Some close-ups of conic sliced models:
20mm cube (partial)
3D Benchy (roof & chimney)
3D Benchy (cabin)
Overhang model (top view)
Overhang model (view on actual overhang)
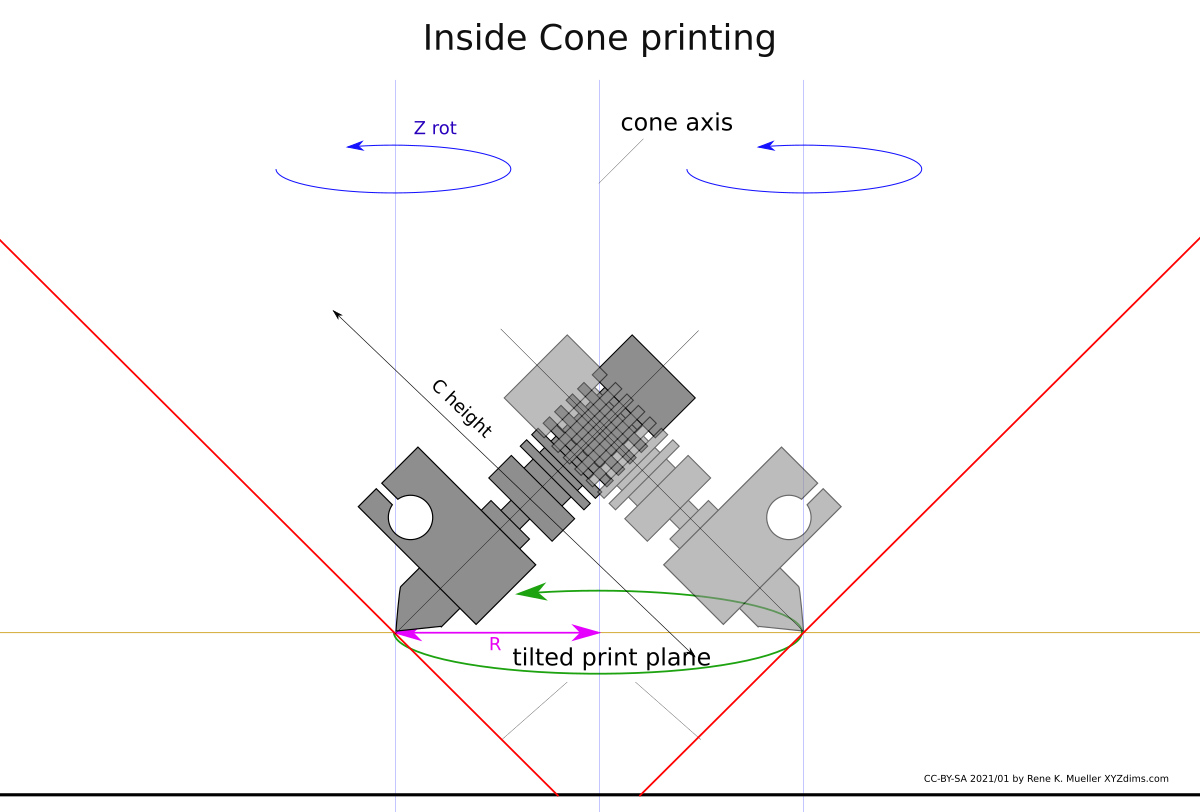
Outside- vs Inside-Cone Printing
As pointed out in the previous blog-post, the RTN has two main modes of operation, outside-cone and inside-cone printing to cover outside overhangs and inside overhangs – the slicer must recognize those and switch operation mode. Further, these two modes cannot easily be mixed, and need to be segmented or separated, hence speaking of volume segmentation.
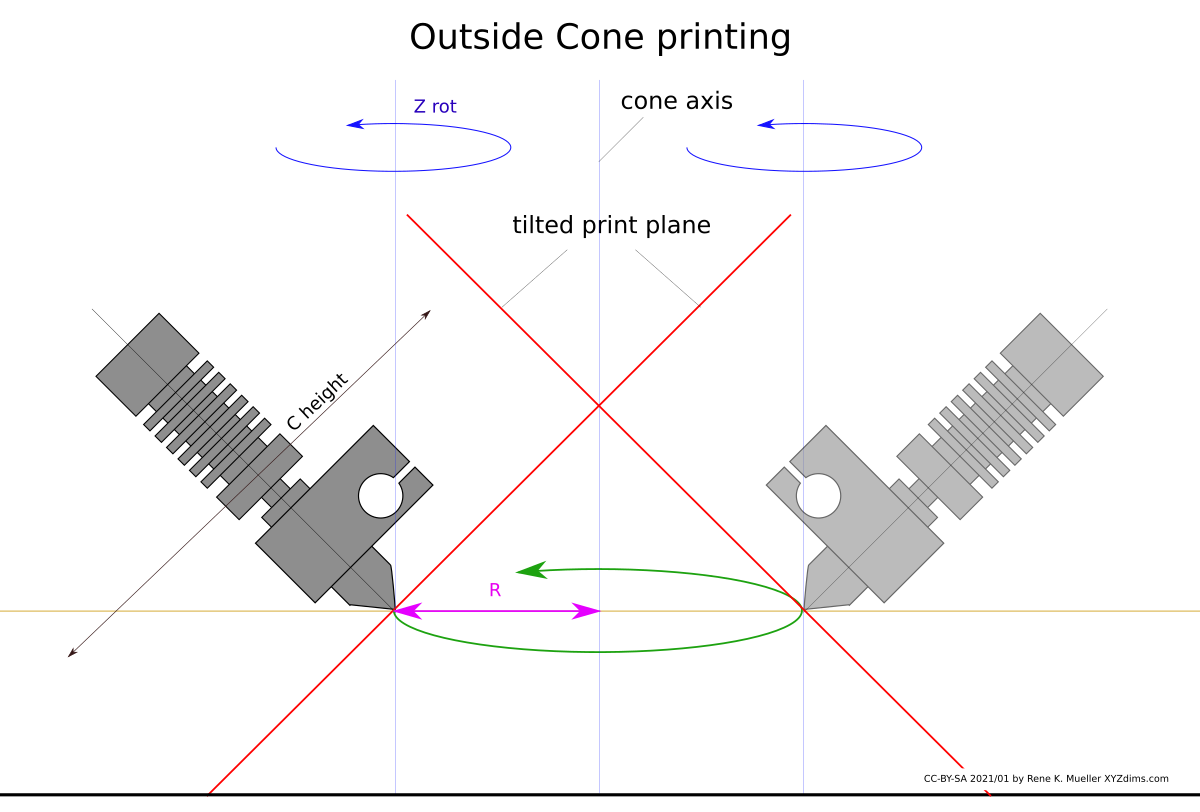
Outside Cone printing
Inside Cone printing
outer overhang
inner overhang
outside-cone printing for outside overhangs
inside-cone printing for inside overhangs
Inside cone for inner overhangs (bottom) vs outside cone for outside overhangs (top)
This poses significant grow of complexity from just planar slicing, the 4-axis RTN provides features to print 90° overhangs without support structure, but only when the part can be properly analysed and segmented so that those operational mode can be applied.
The difference between inside- and outside-cone printing is to change the order of conic mapping for the model and post slicing:
outside-cone mode
map model inverse conic
slice model
map G-code direct conic
inside-cone mode
map model direct conic
slice model
map G-code inverse conic, Zrot + 180°
Slicer4RTN
The pseudo-code turned into an actual application I named slicer4rtn and is a command-line tool, slicing STL into G-code:
I gonna released Slicer4RTNeventually 2021/03/22, in its early version the model currently can only be sliced for outside-cone or inside-cone printing, so the volume decomposition or segmentation needs to be done separately. For now it helps me to verify some of the 4-axis and 5-axis printer designs I work on.
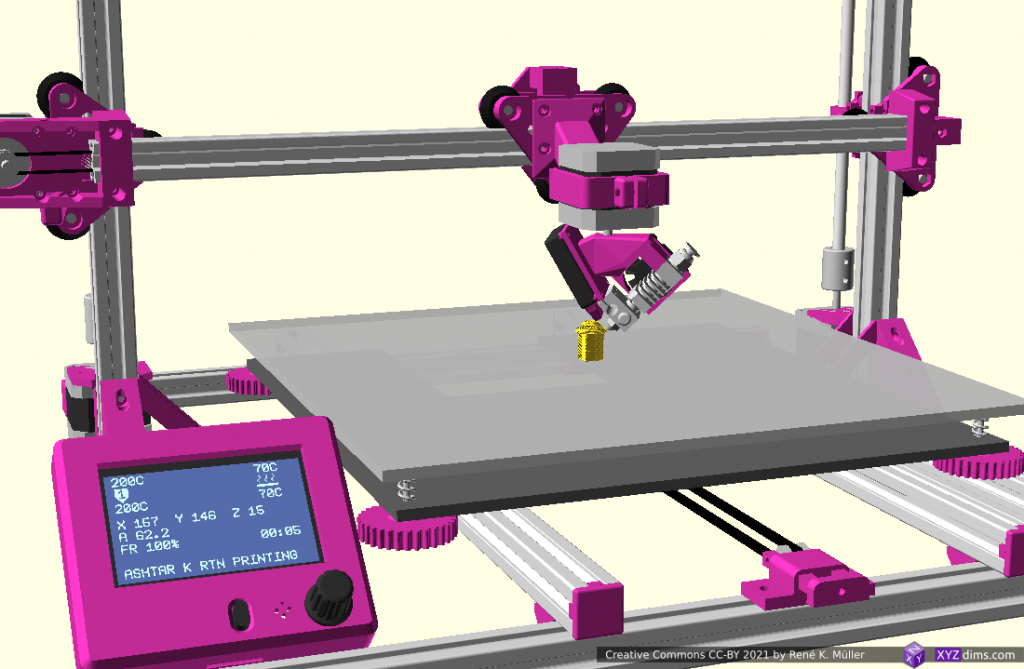
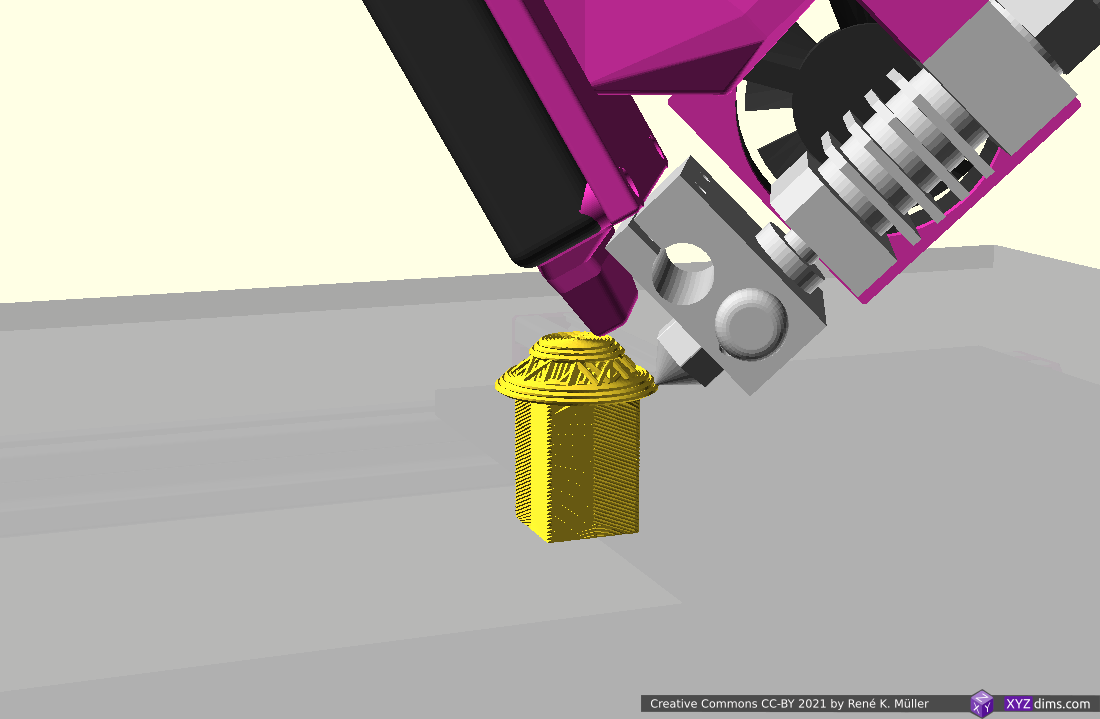
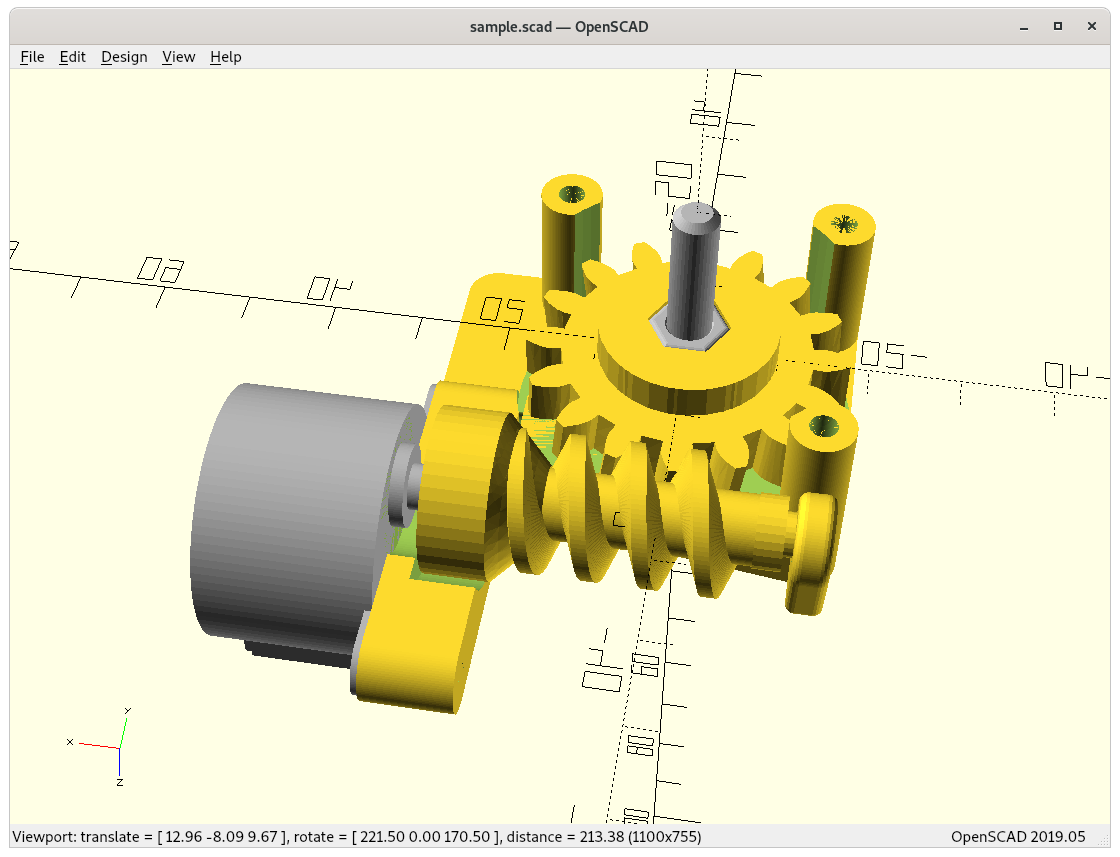
Ashtar K RTN printing conic sliced 20mm cube (close up, animation)Ashtar K RTN printing conic sliced overhang model without support structure (close up, animation)Ashtar K RTN printing conic sliced overhang model nr 6 (table-like) without support structure (close up, animation)
RotBot by ZHAW, the inventors of the Rotating Tilted Nozzle (RTN) approach by Prof. Dr. Wilfried Elspass, Dr. Christian Jaeger, Michael Wüthrich, Maurus Gubser, Philip Bos and Simon Holdener
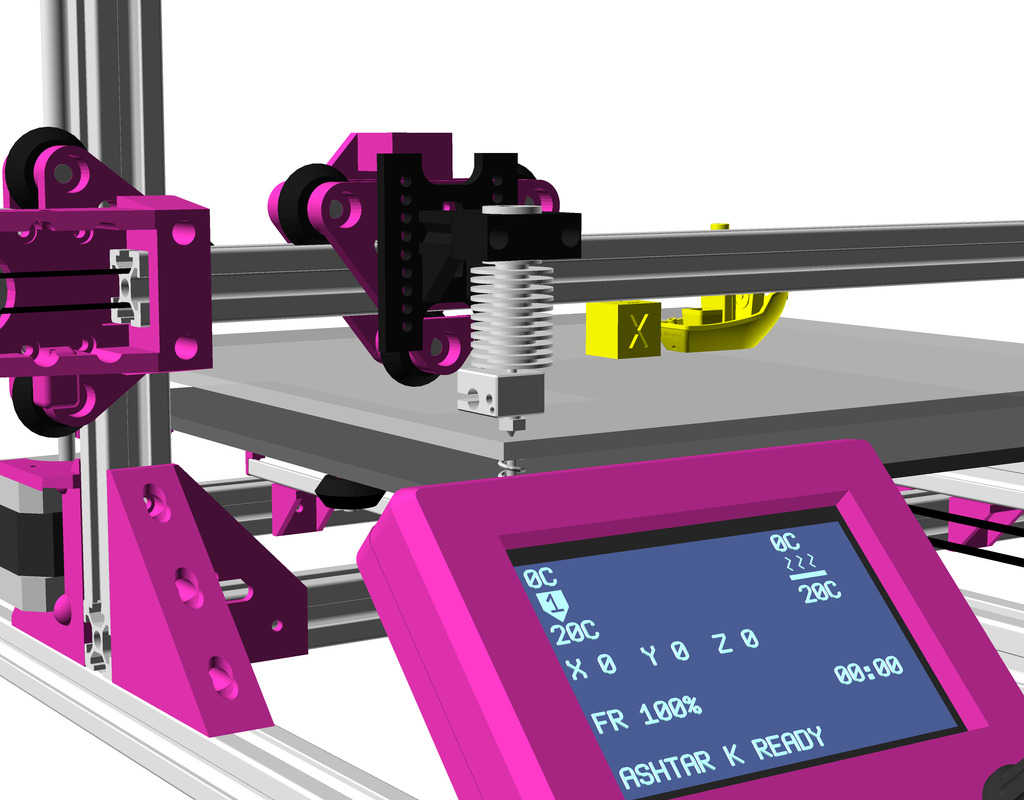
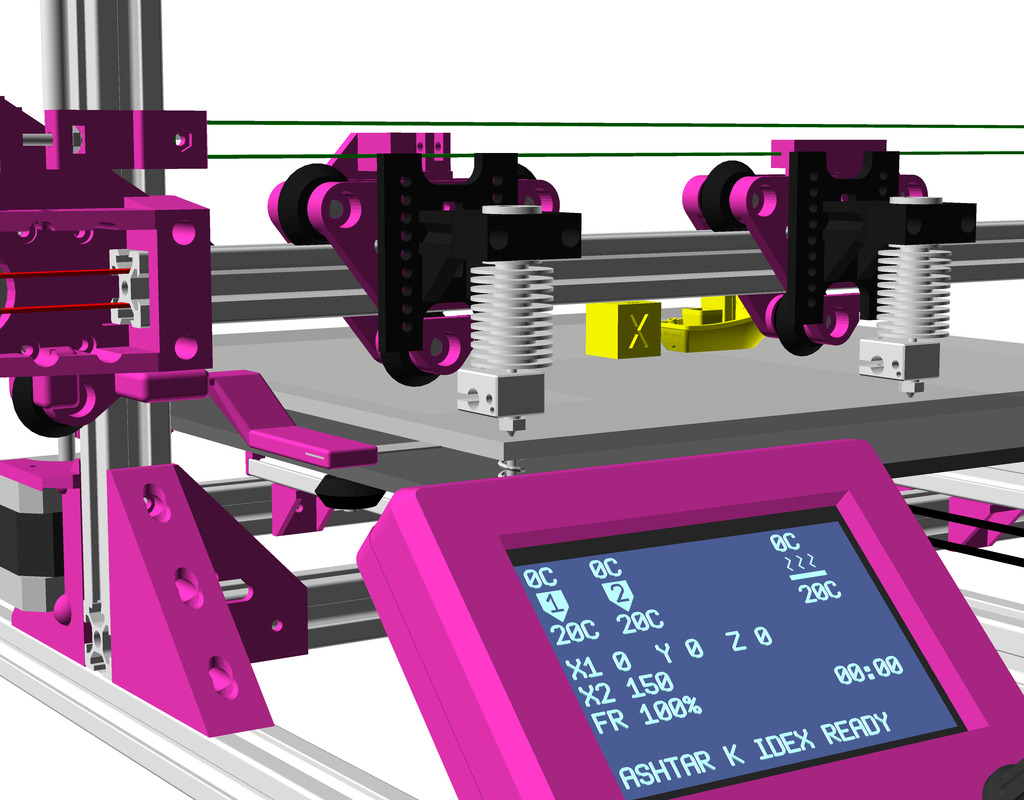
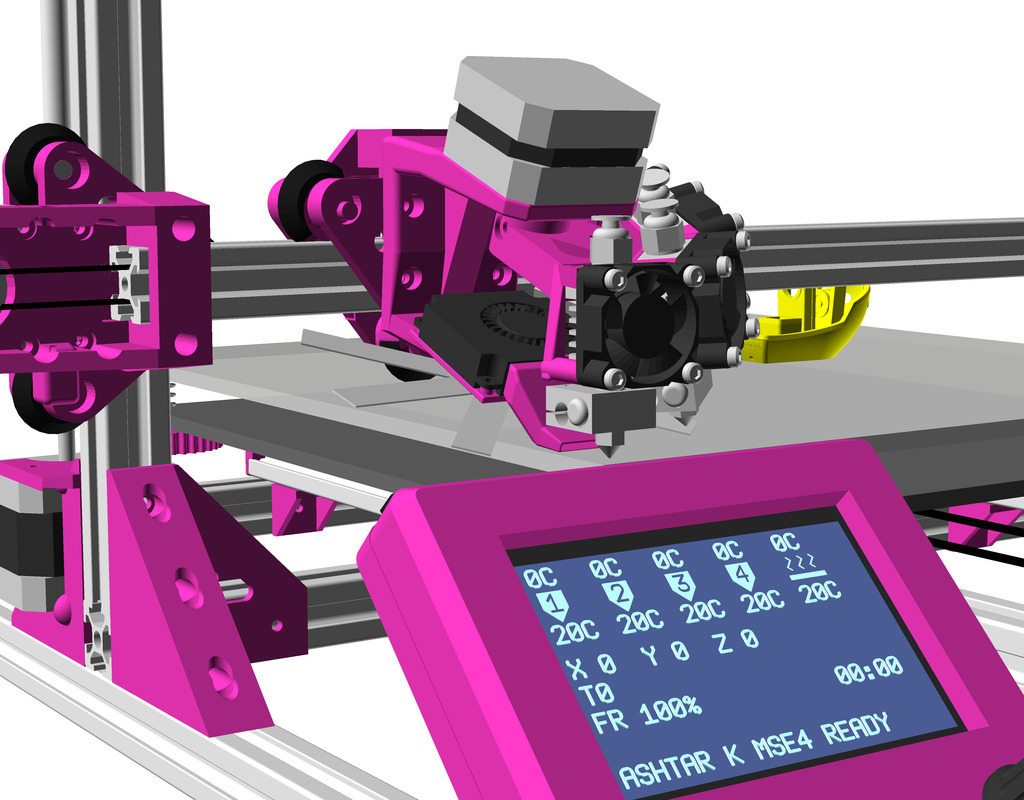
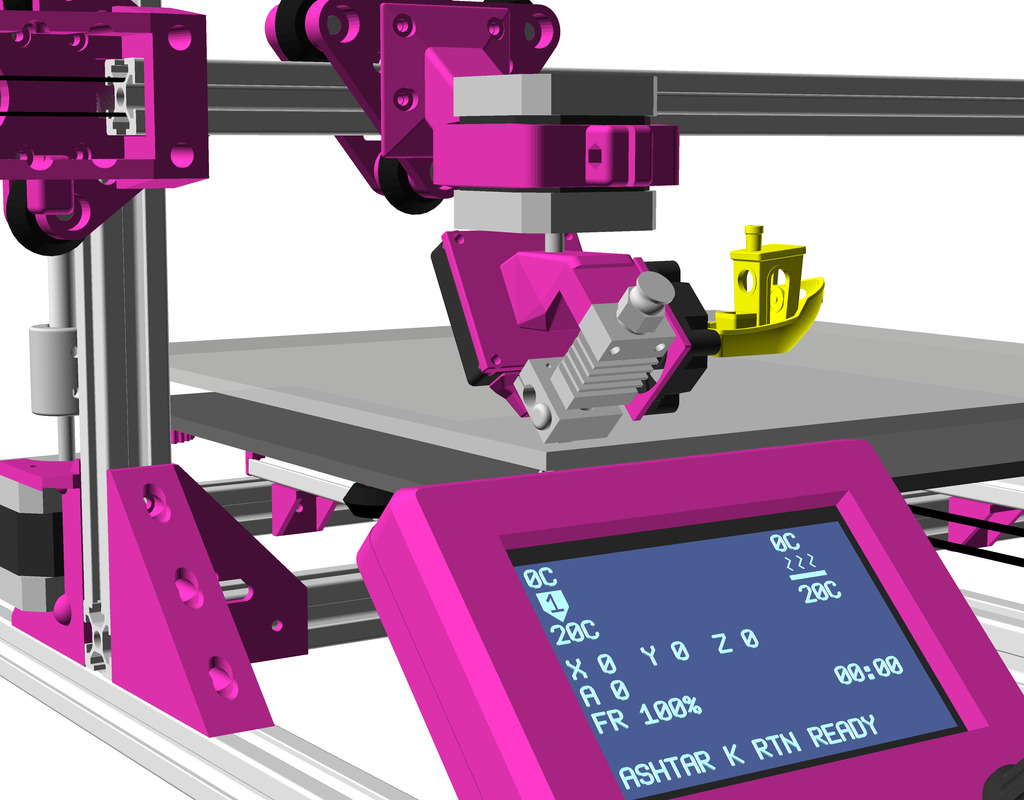
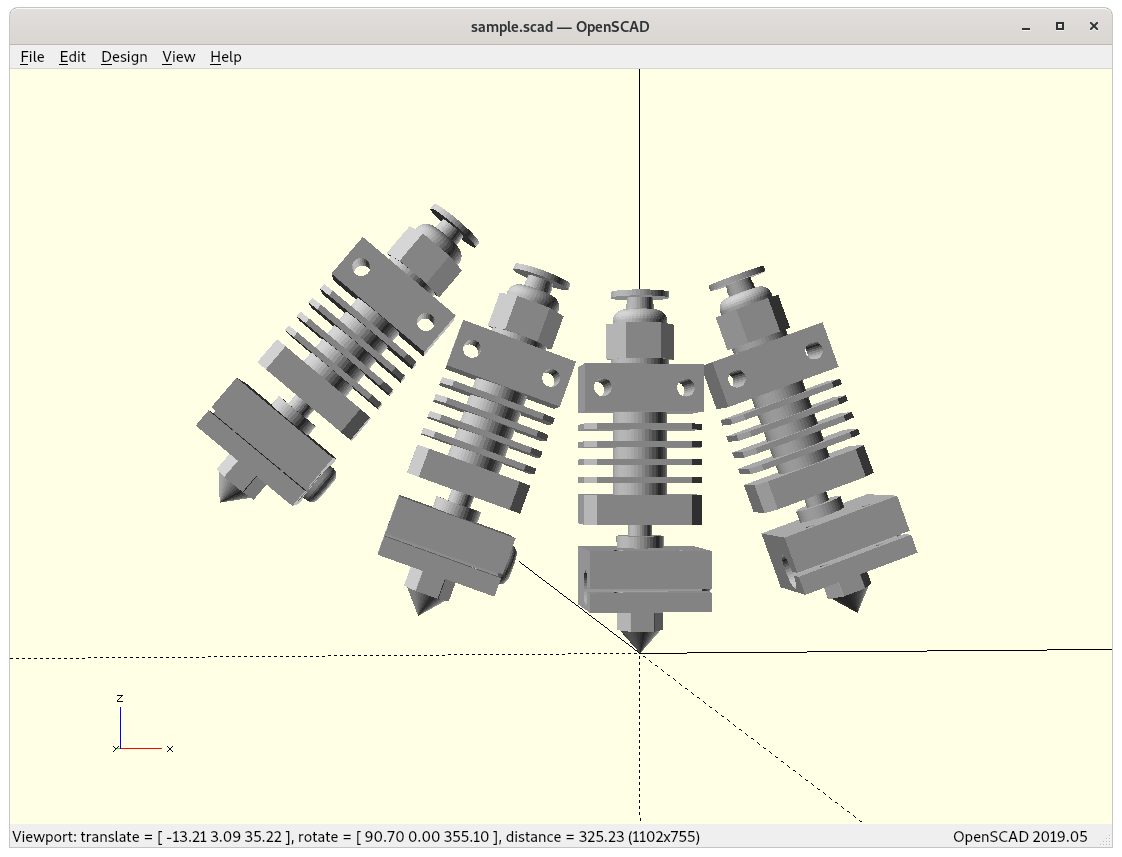
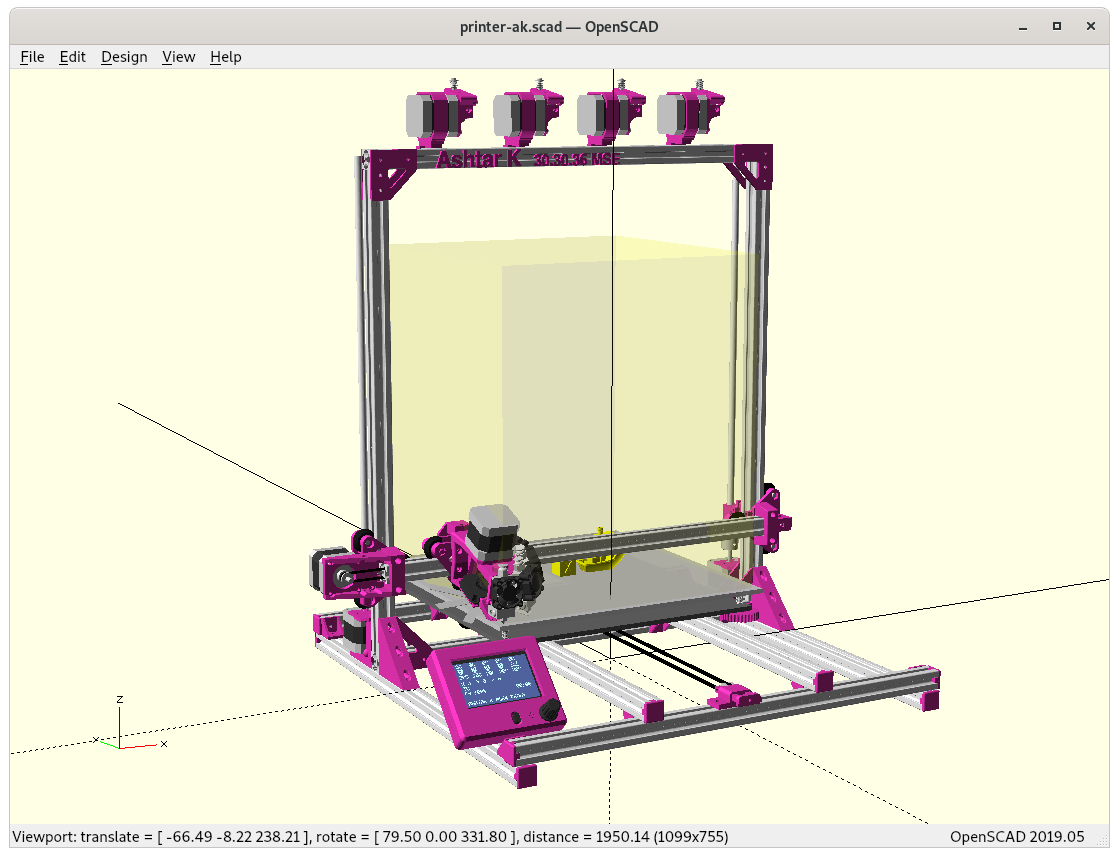
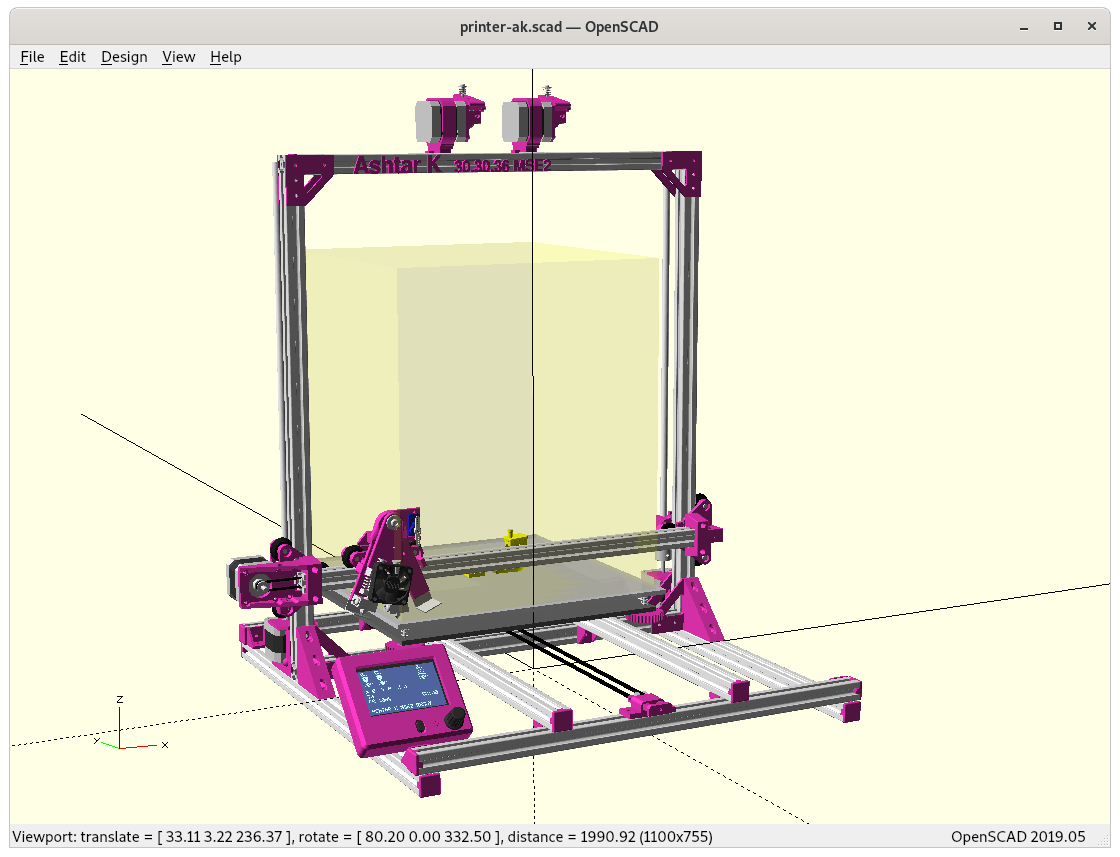
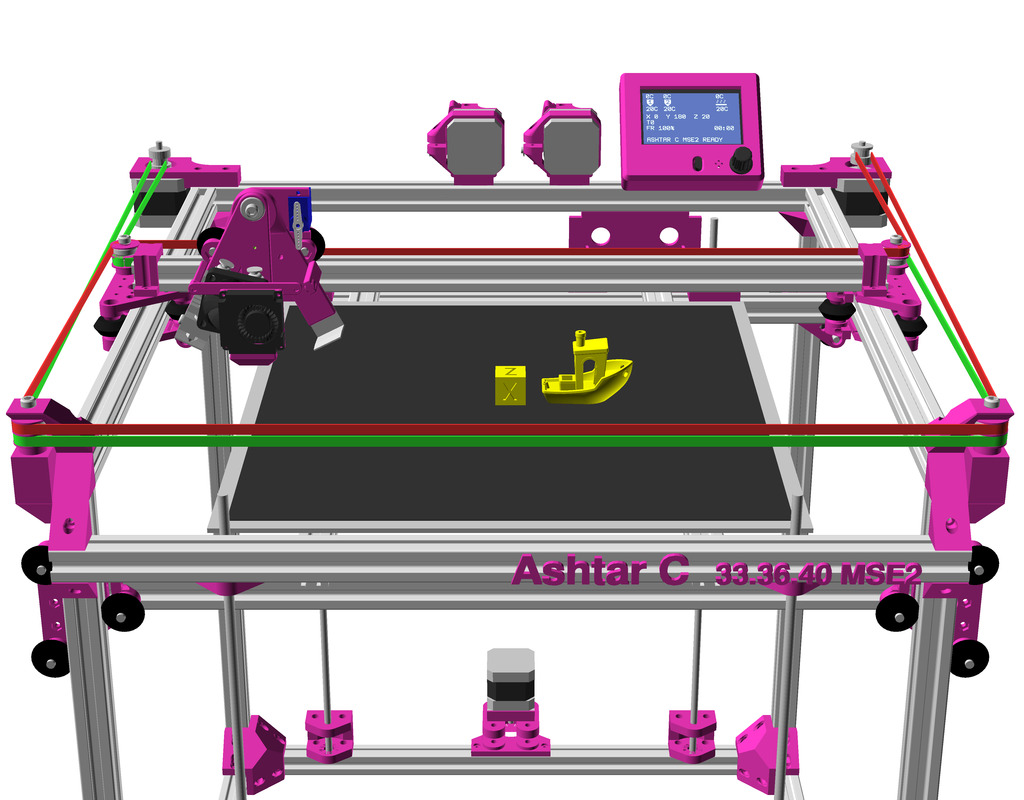
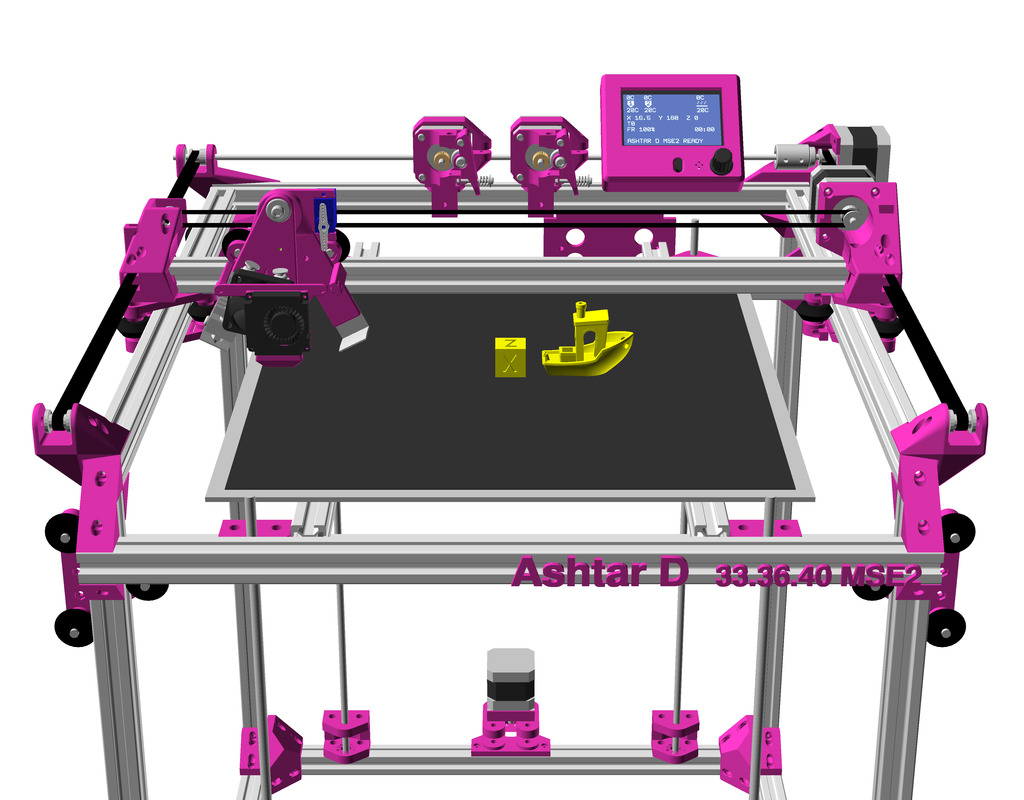
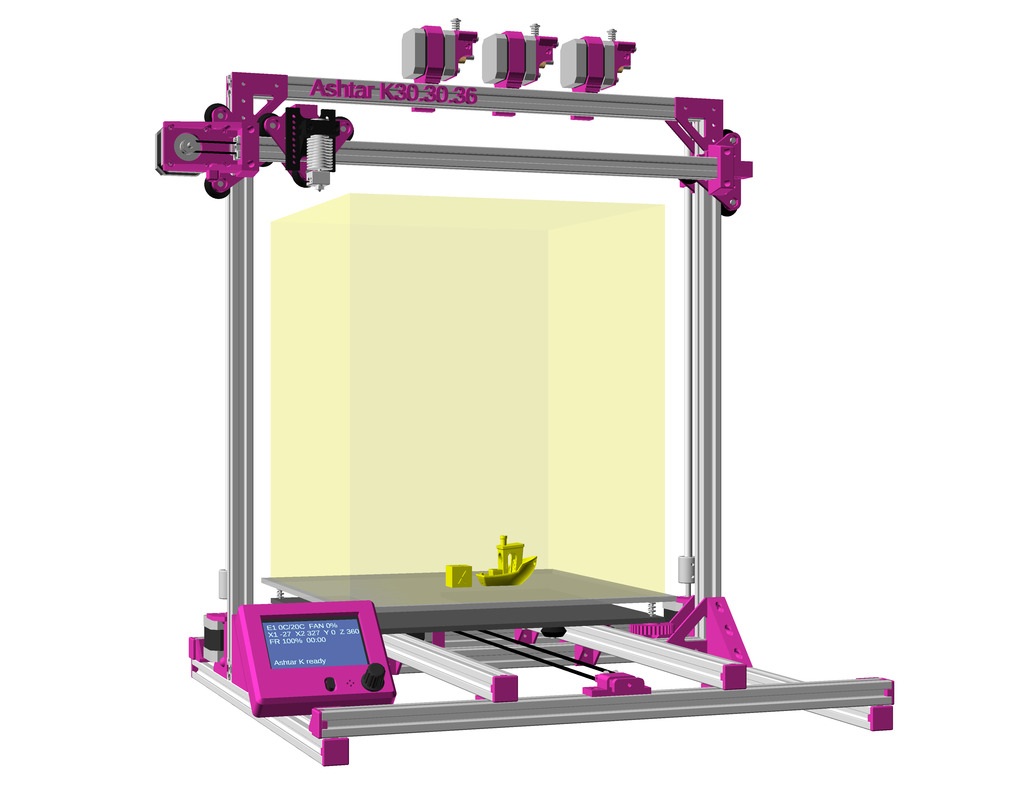
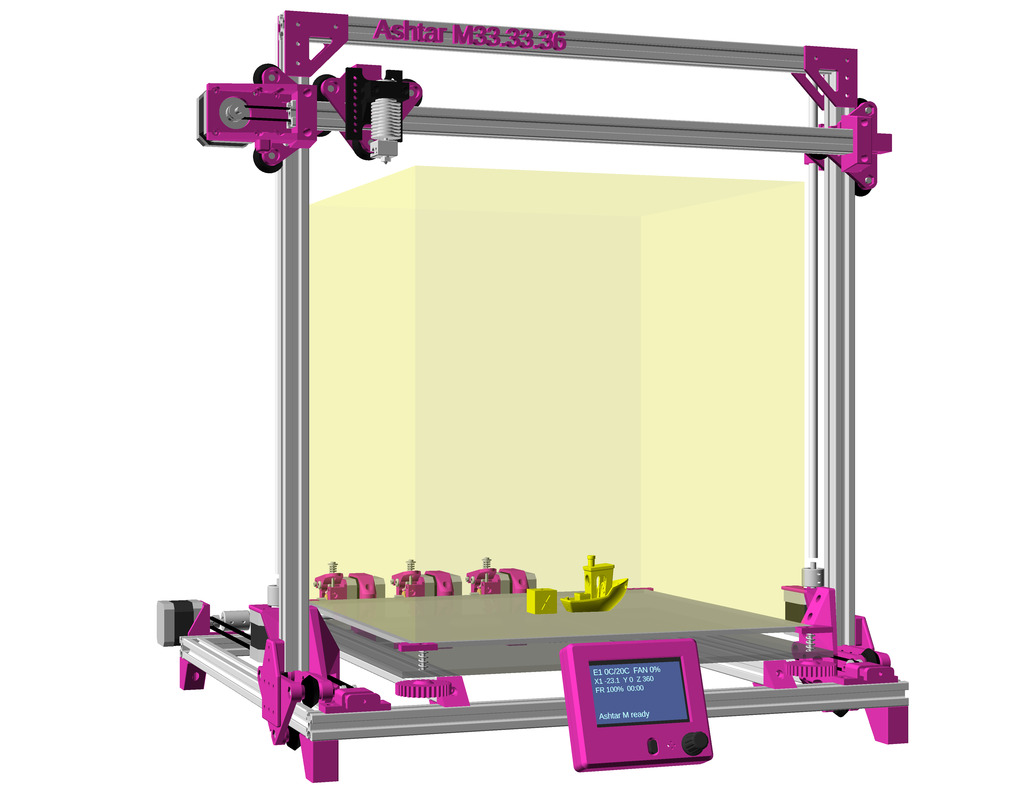
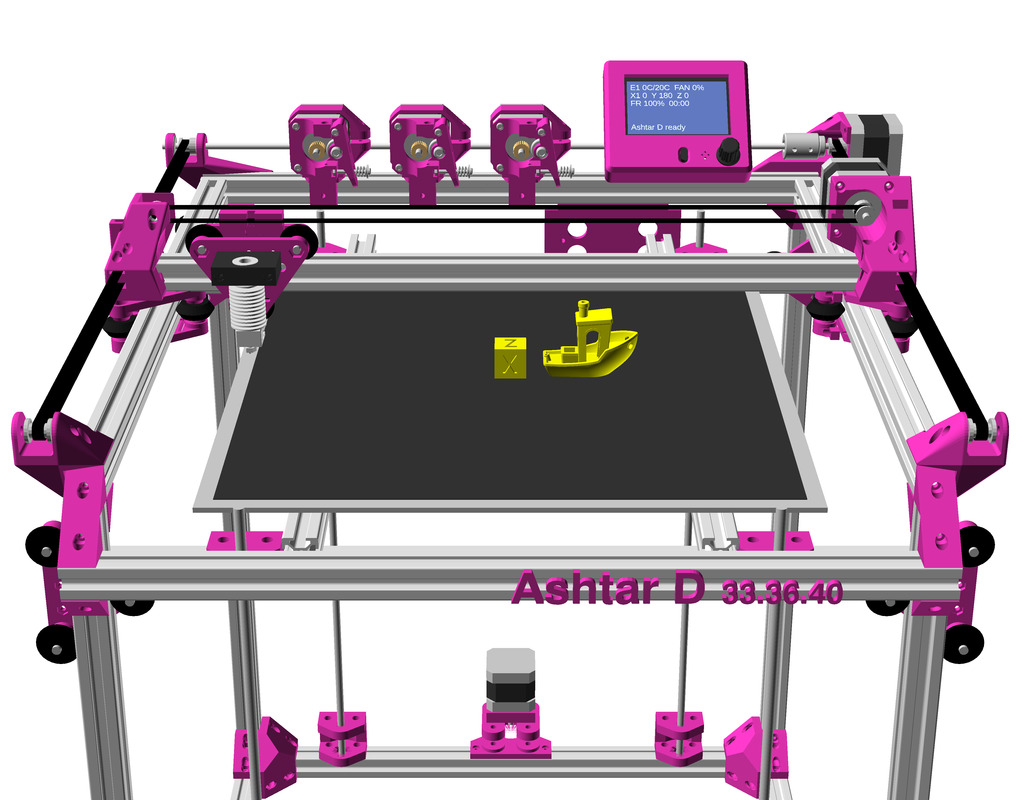
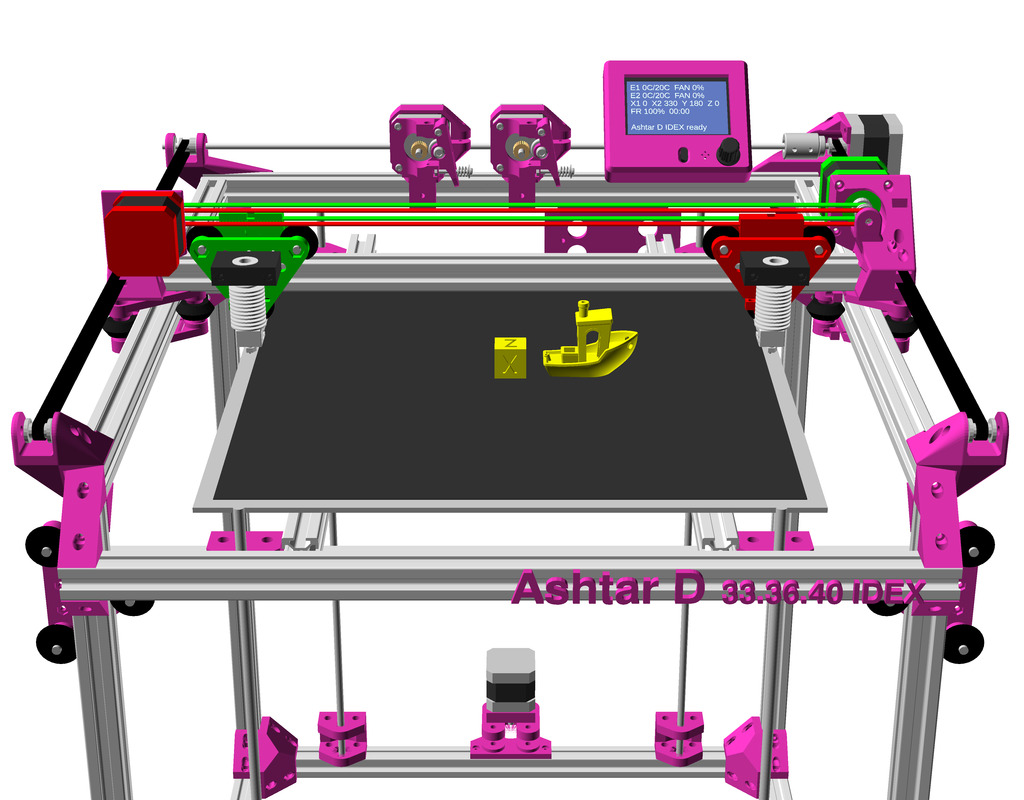
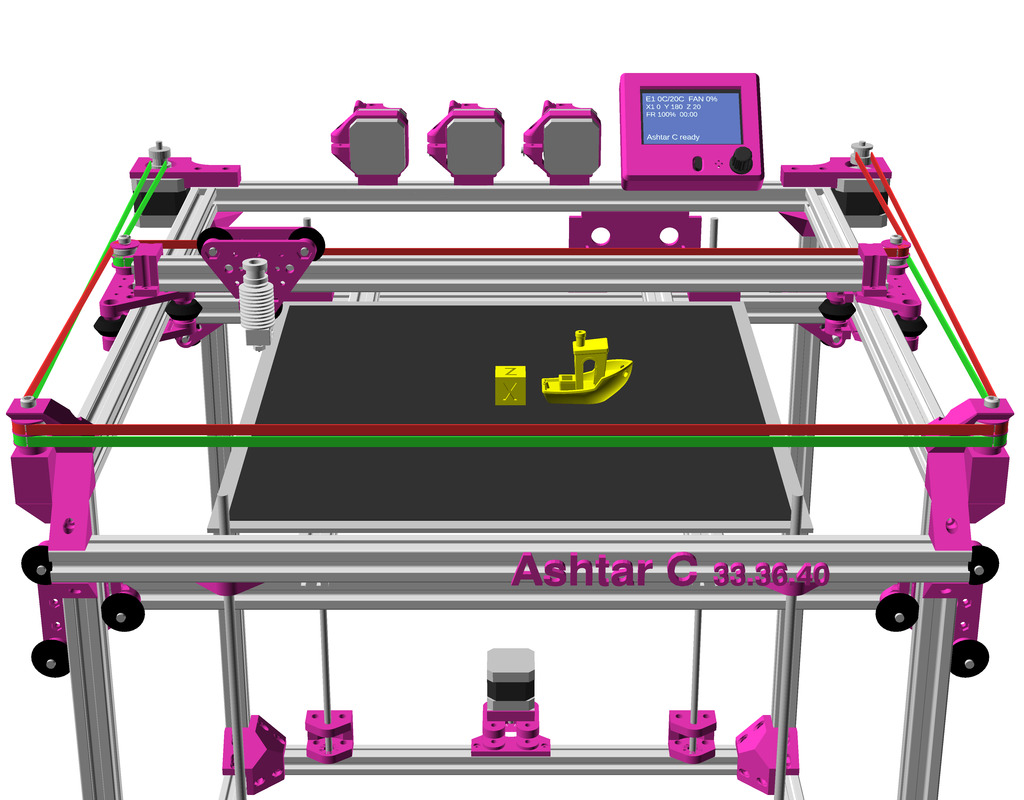
The past weeks (2021/02) I worked on various printhead designs, to summarize and provide an overview by mounting them on Ashtar K:
E3D V6 (bare without fans), 2019/09
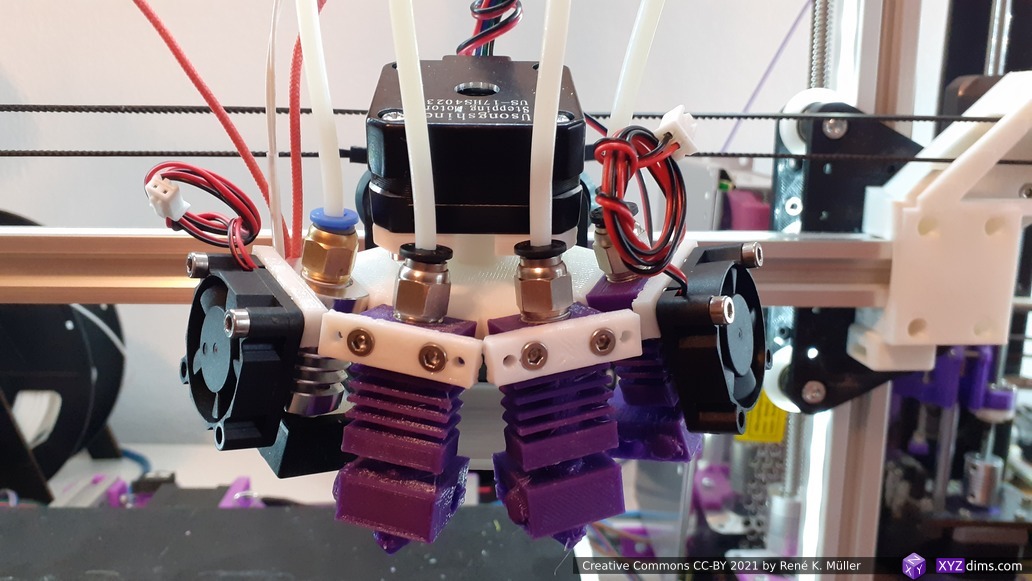
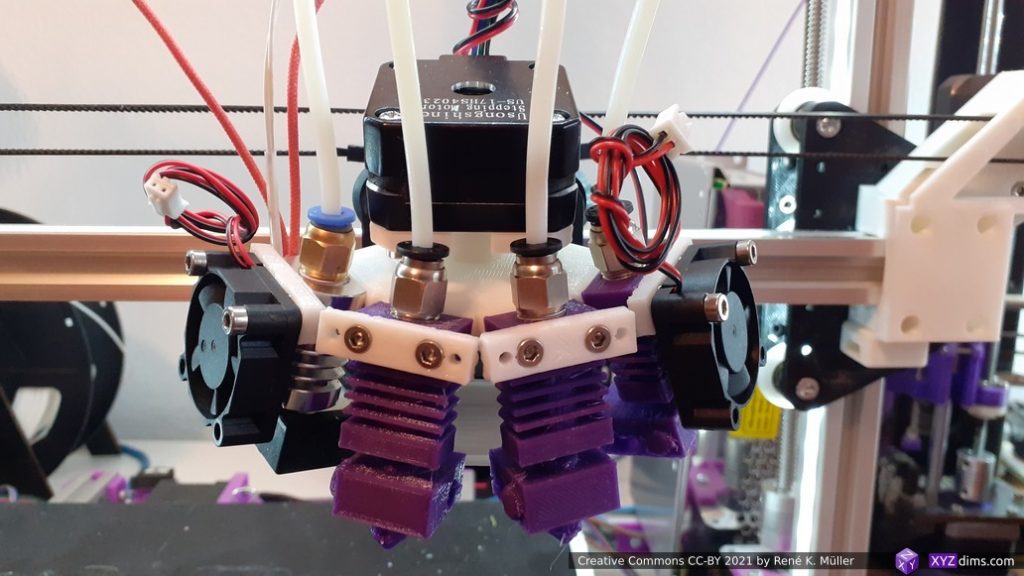
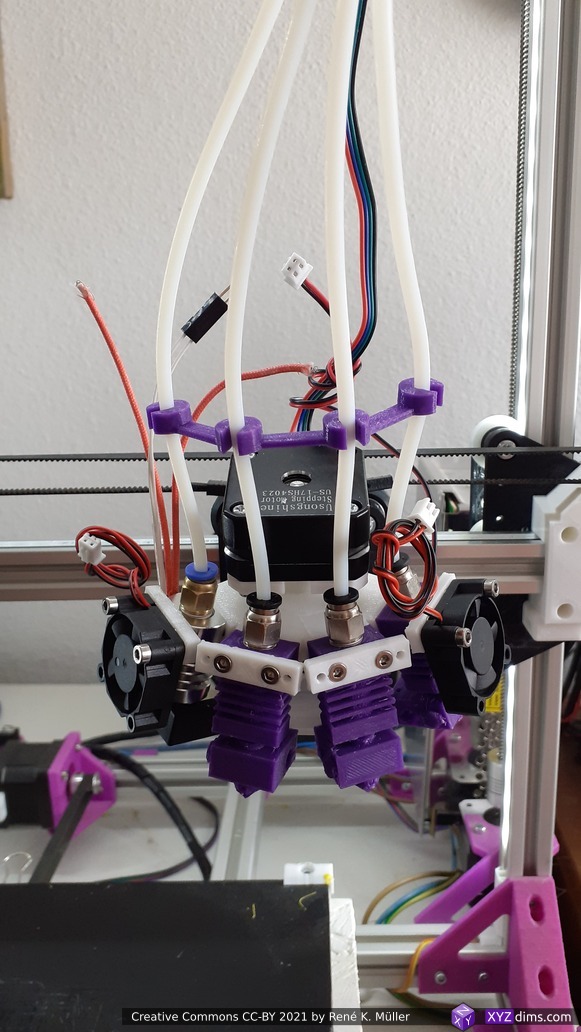
Dual Independent Extruders (IDEX), 2020/12
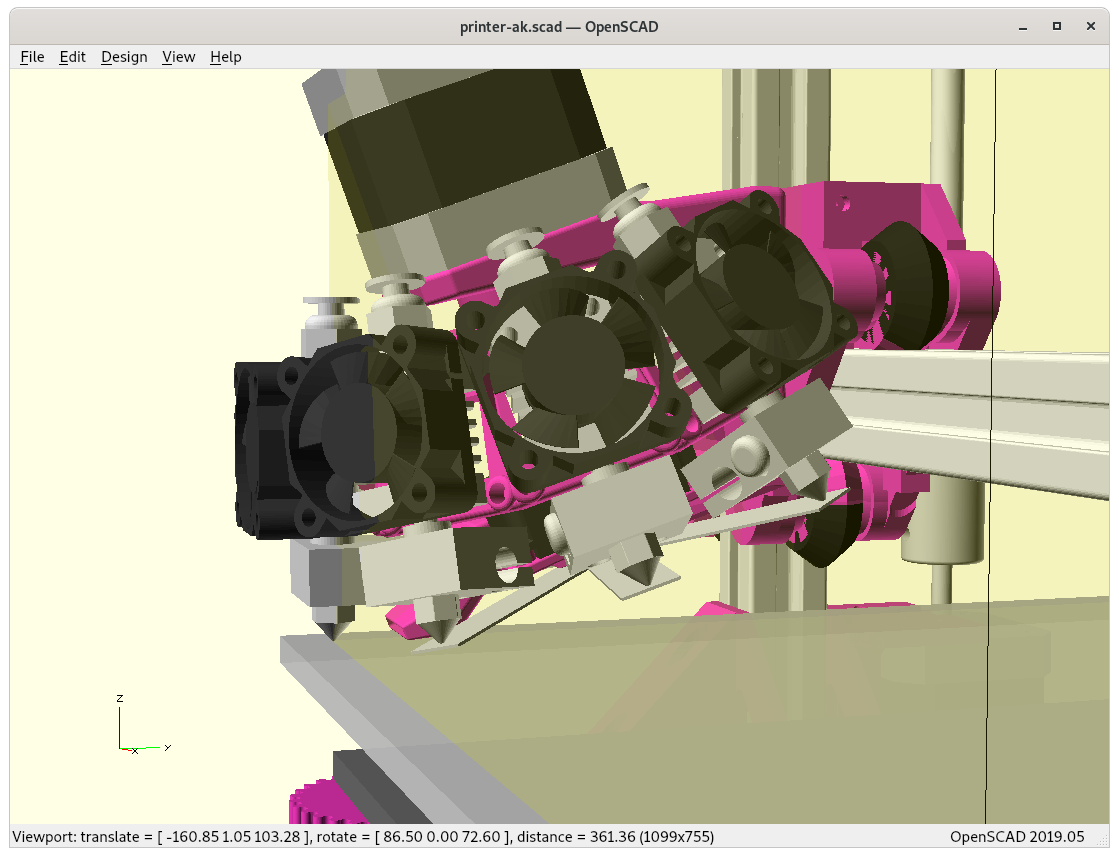
Multiple Switching Extrusions (MSE), Rotary Y 2, 2021/02
Multiple Switching Extrusions (MSE), Rotary Z 4, 2021/01
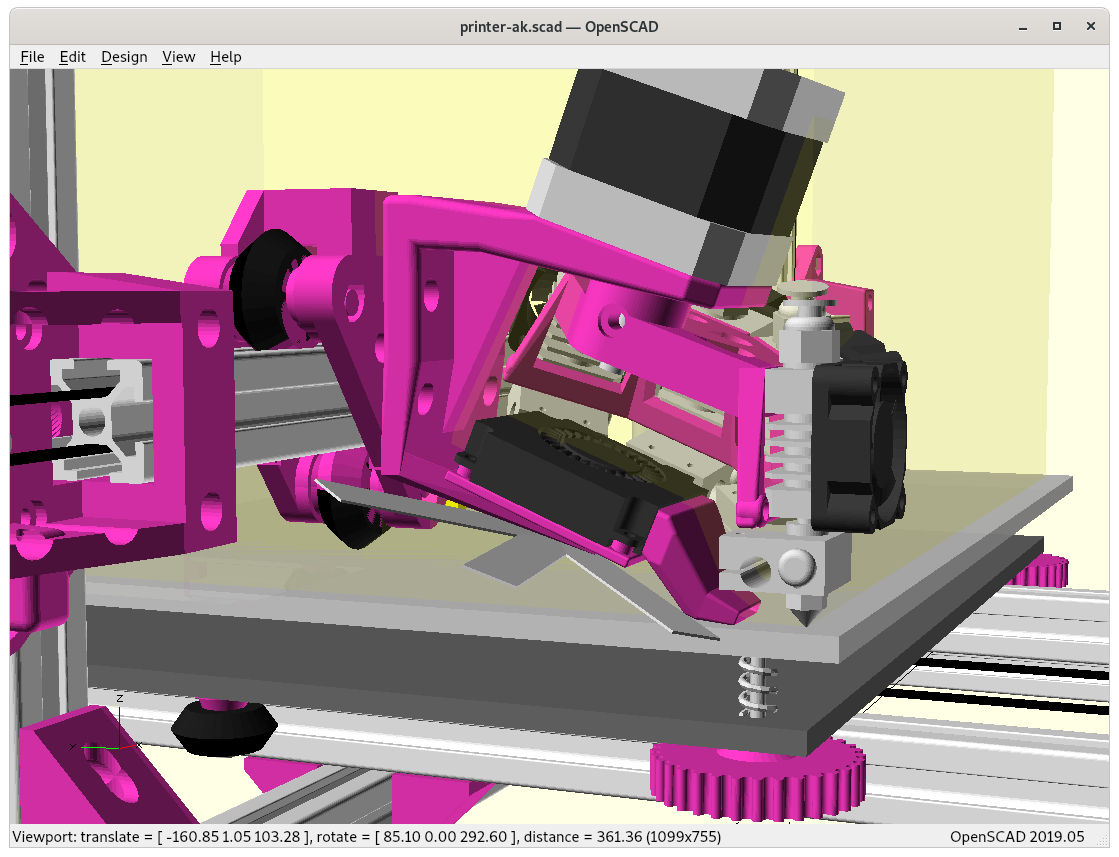
4 Axis Rotating Tilted Nozzle (RTN), 2021/01
5 Axis Printhead (PAX), 2021/02
Also improved the display controller to simulate Marlin firmware and list heads and tool selection (MSE), coordinates (IDEX) or rotation angles (RTN & PAX).
So far all options are available for Ashtar C, D and M as well, but currently (2021/02) are just in draft and mostly untested.
RTN and PAX promise printable support-free overhangs, yet no public available slicing software exists to really take advantage of those two designs, as new algorithms of volume decomposition, sub-volume sequencing, collision detection are required and mostly debated in scientific papers as 2021/02 and only few companies, e.g. HAGE and VSHAPER, implemented new 5-axis 3D printing procedures, and DotXControl advertises a 5 Axis Slicer.
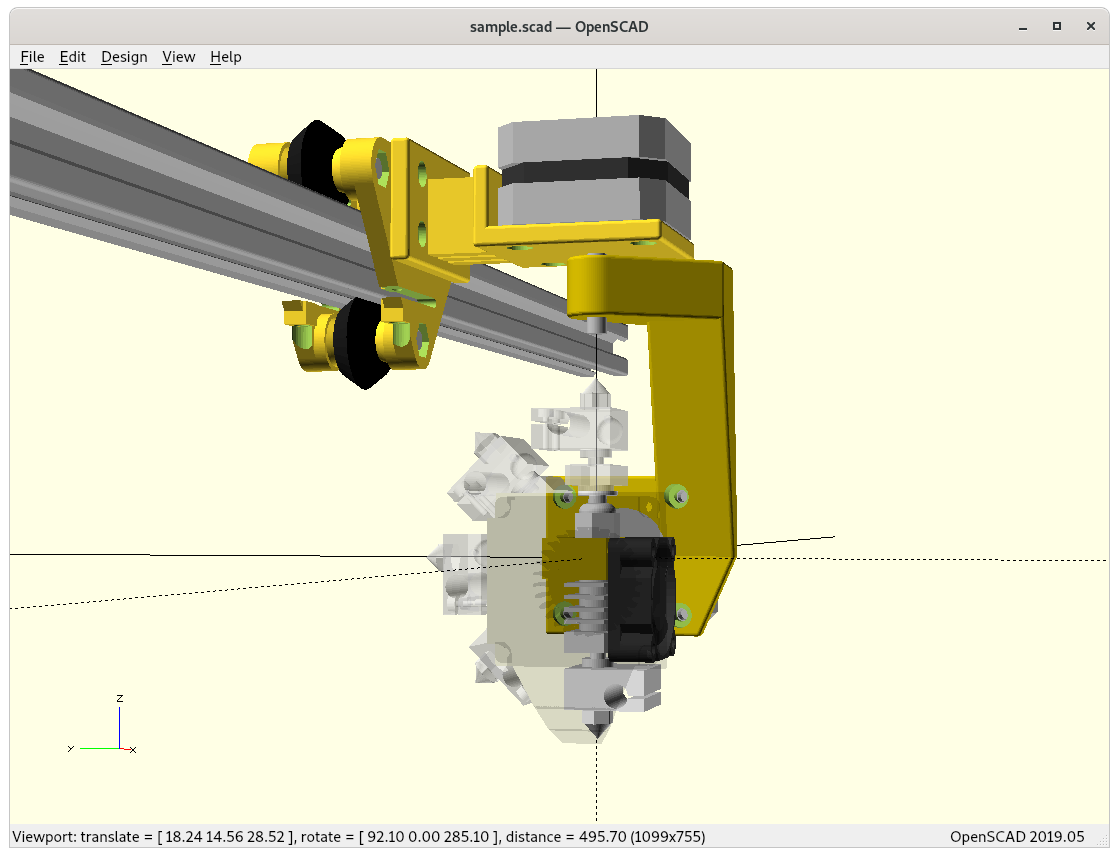
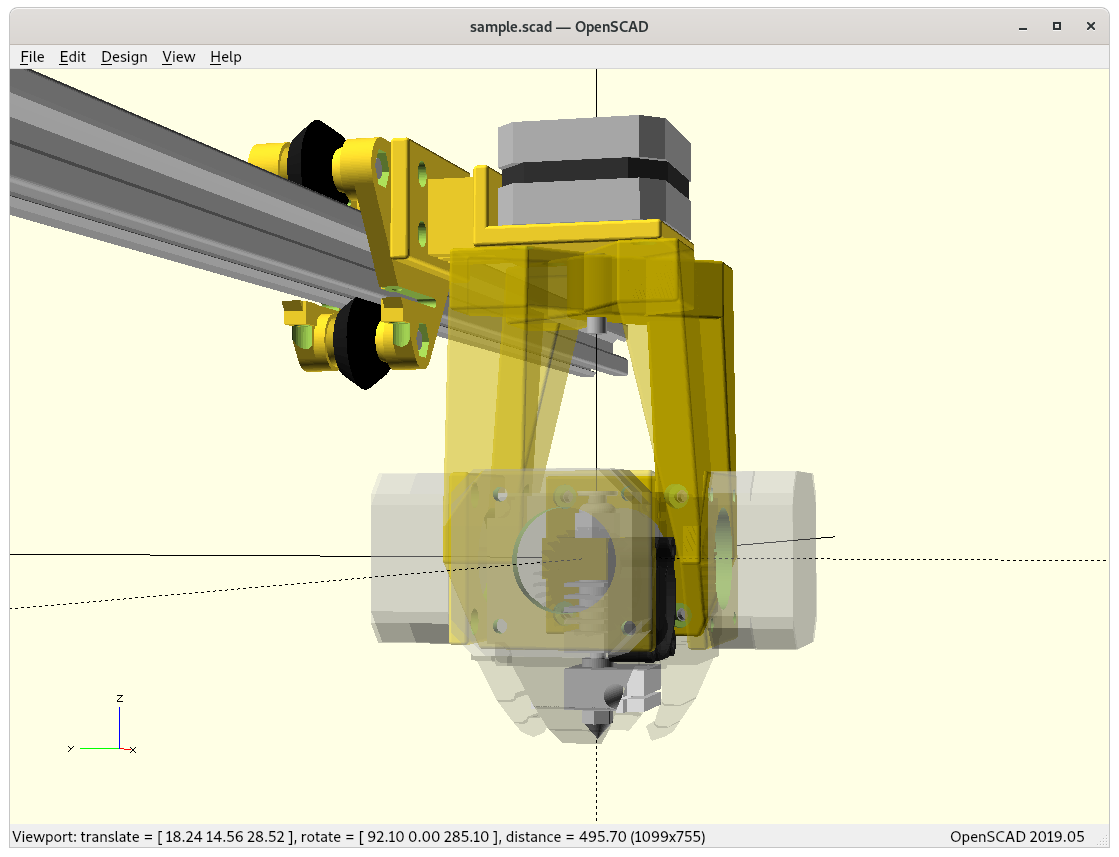
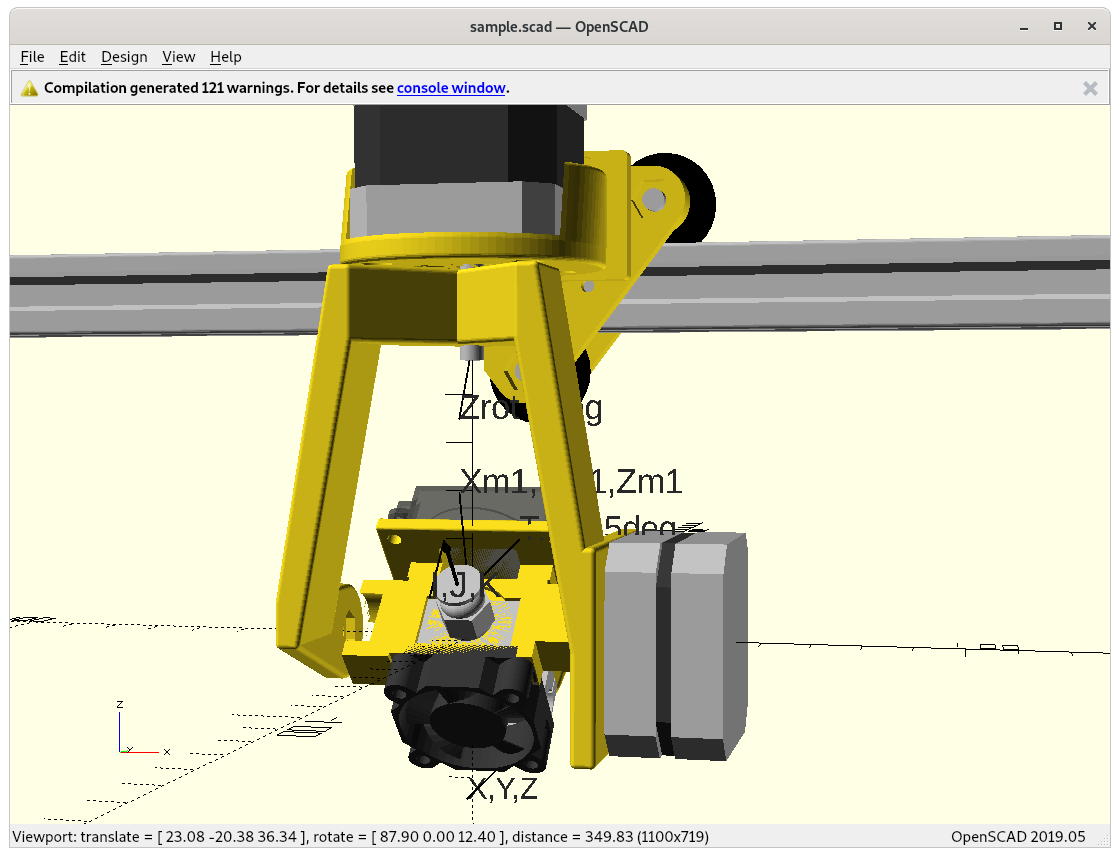
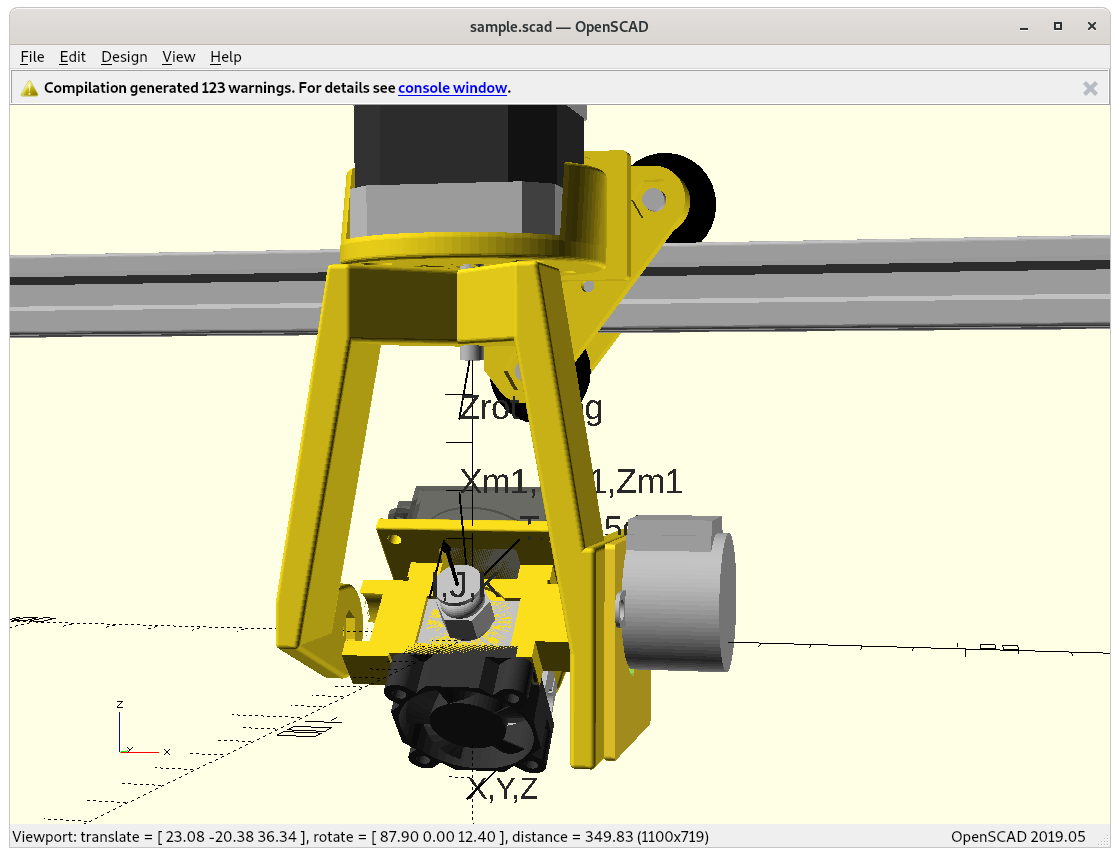
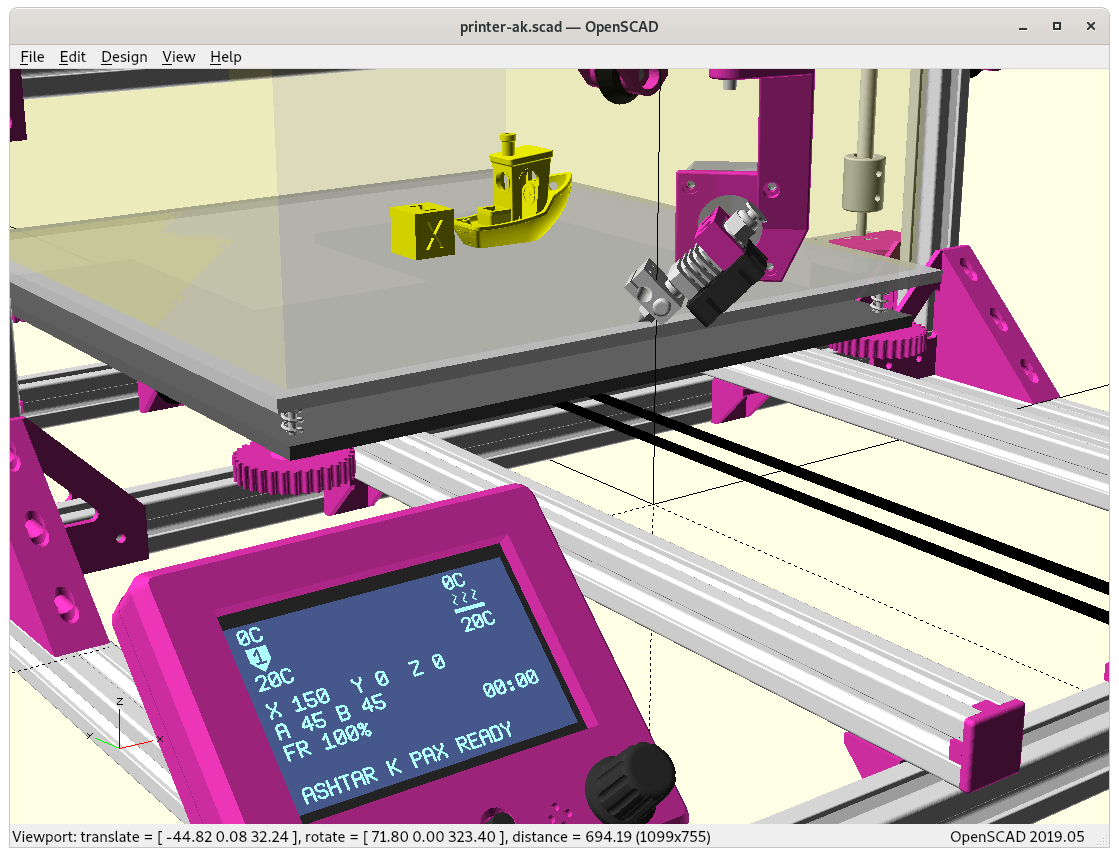
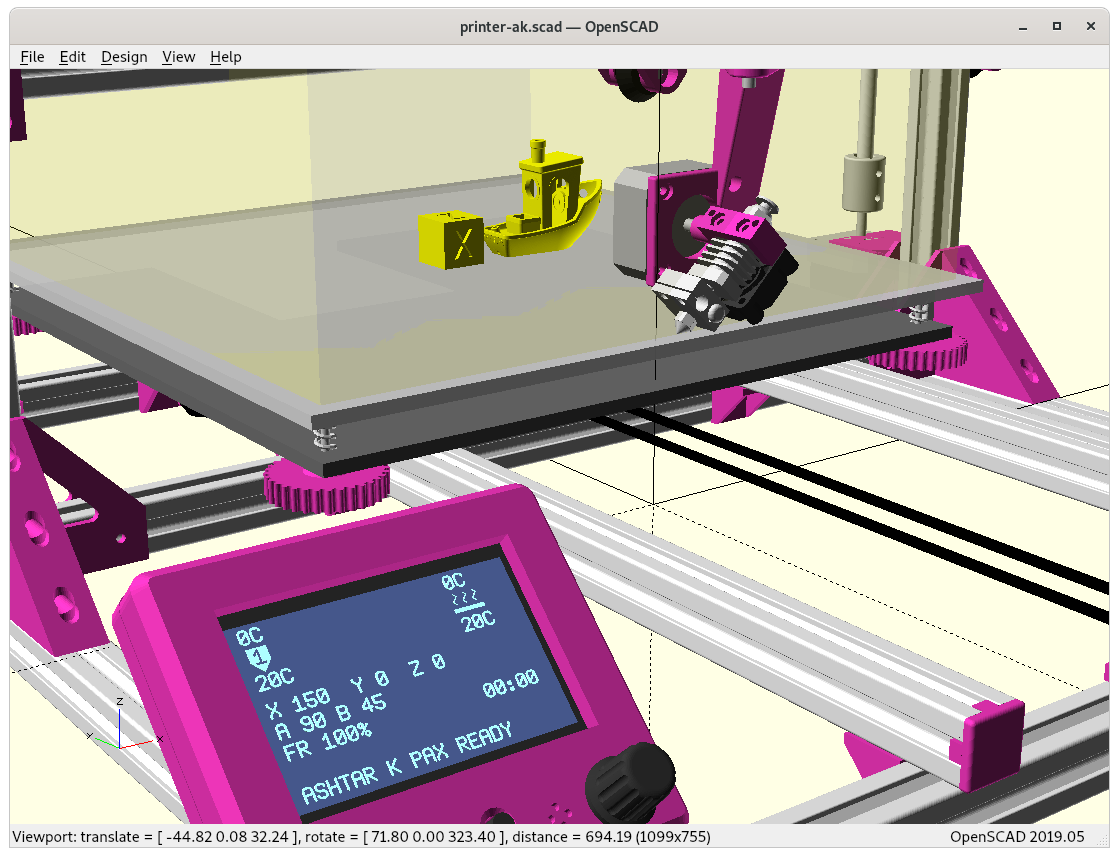
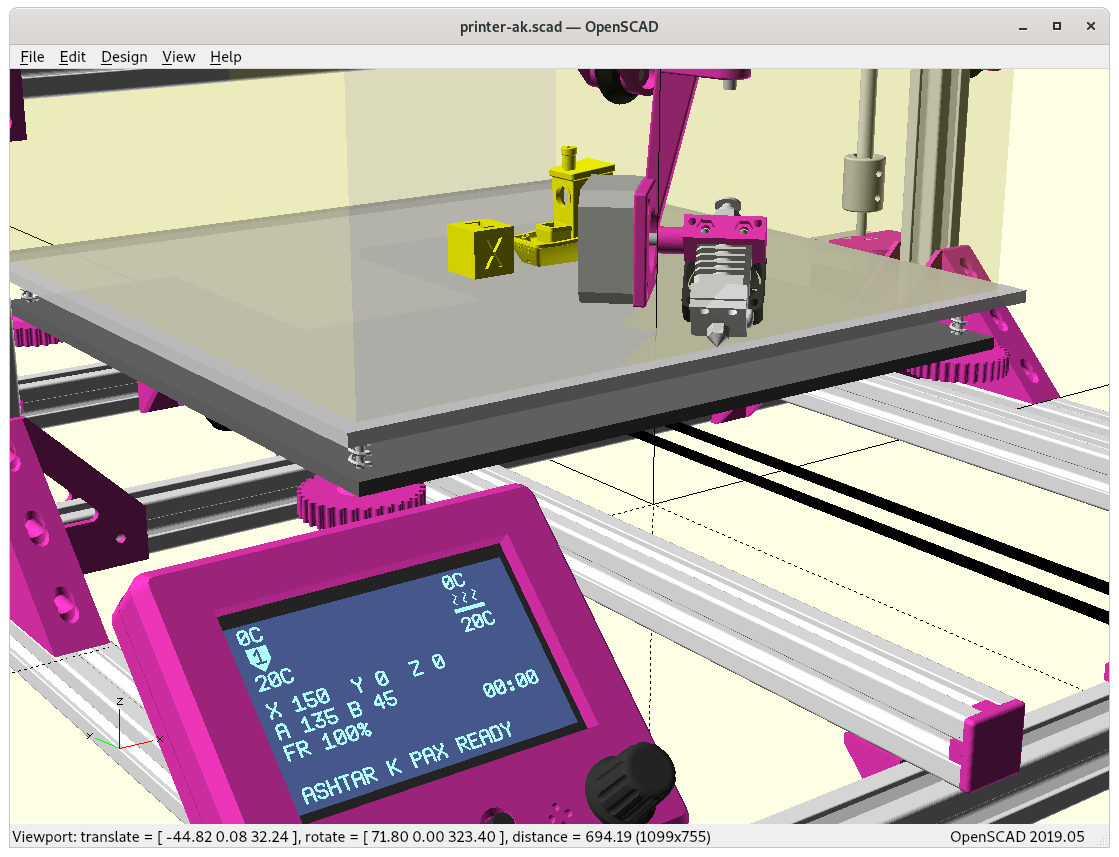
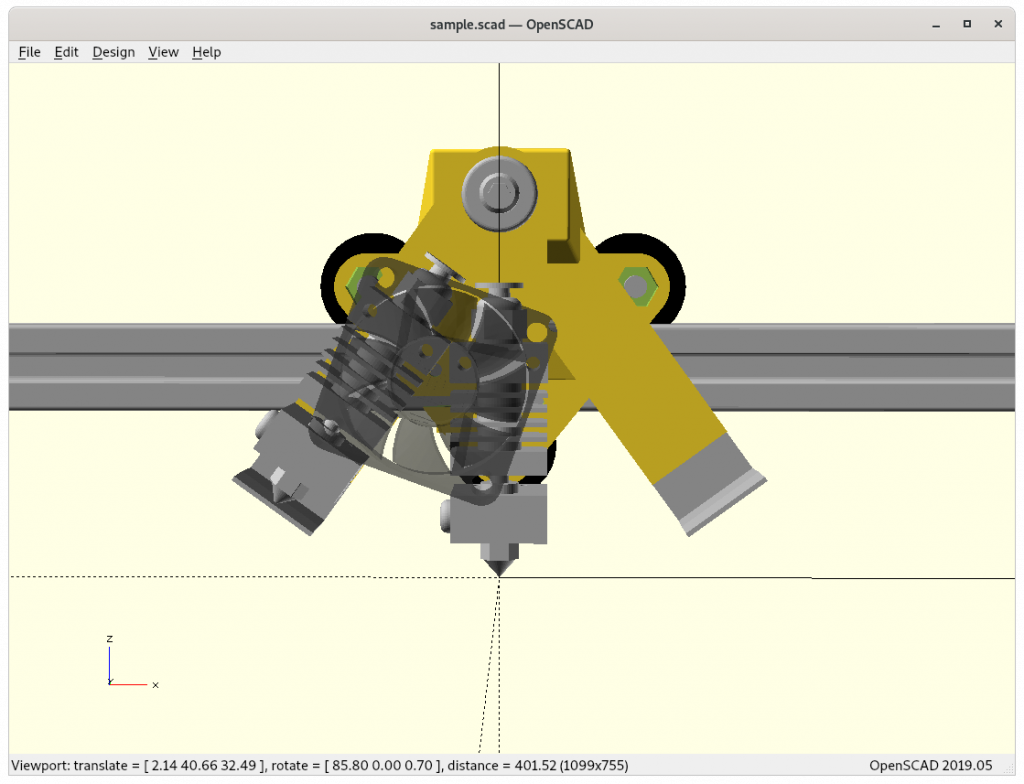
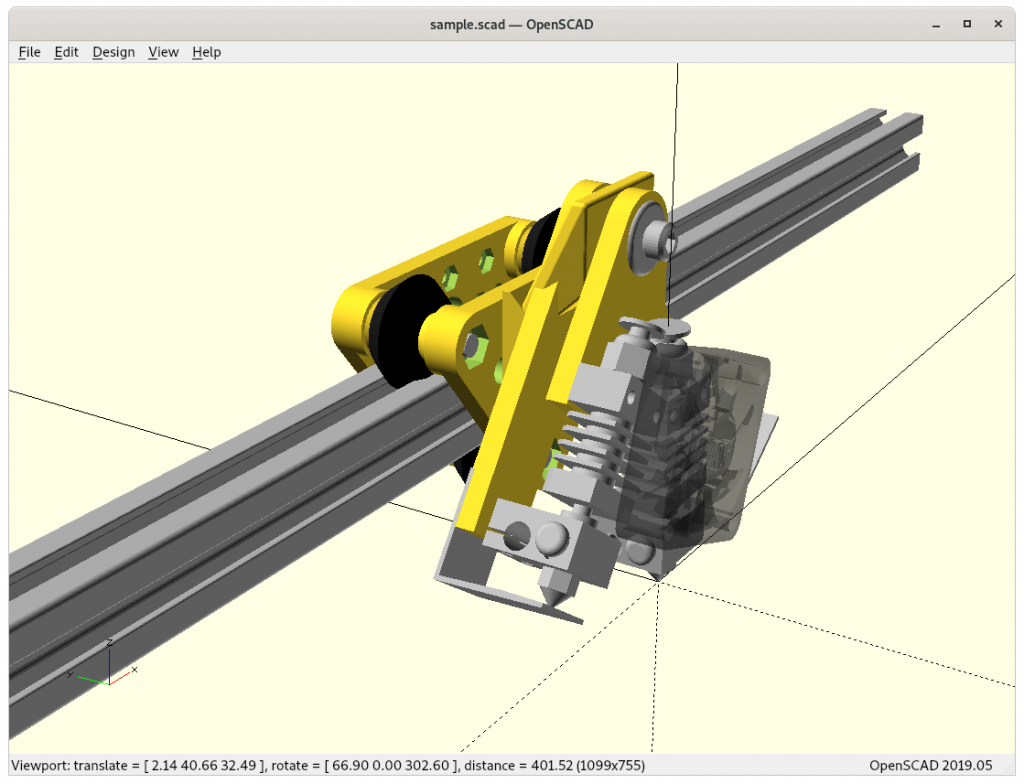
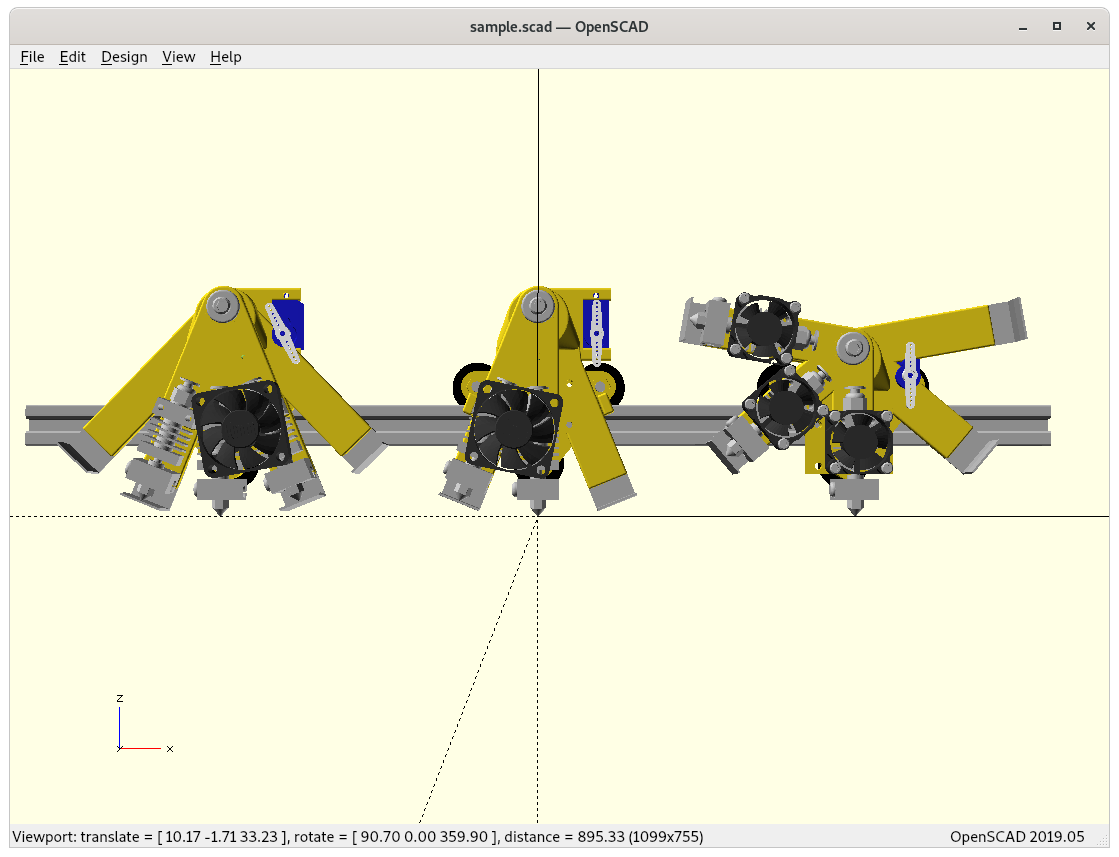
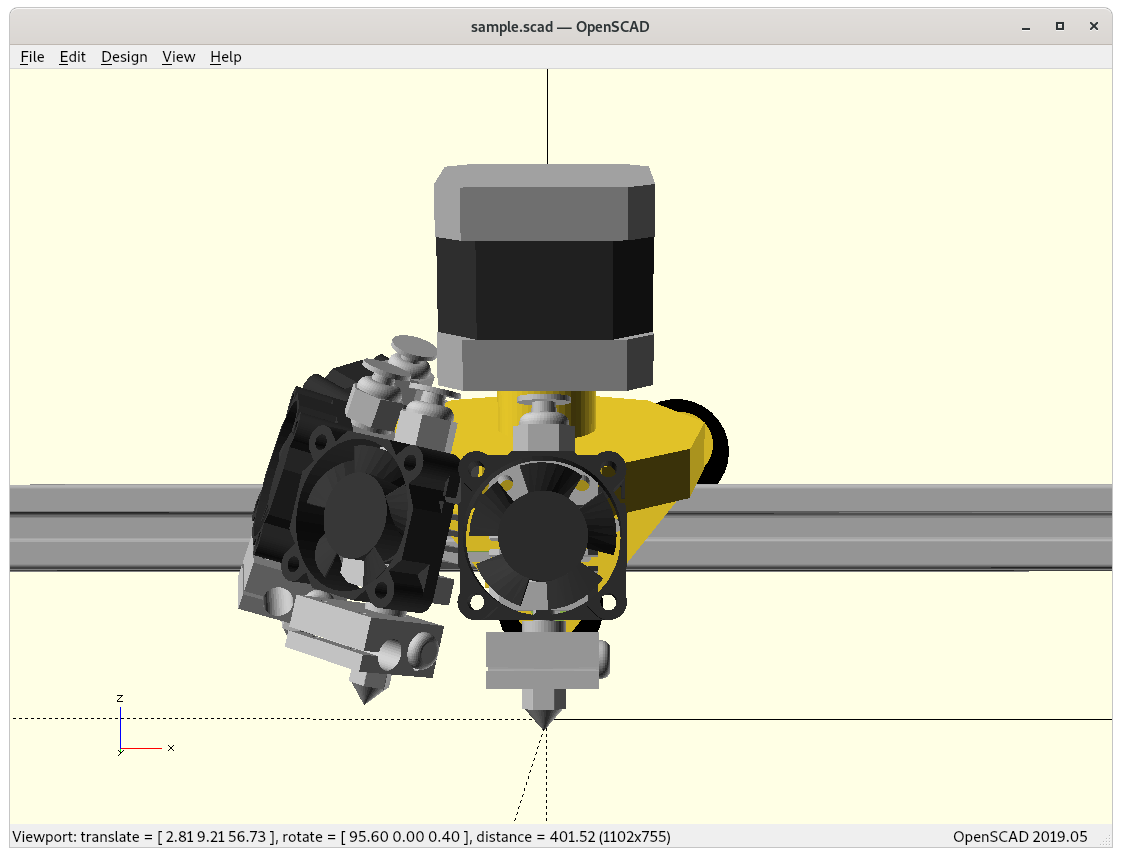
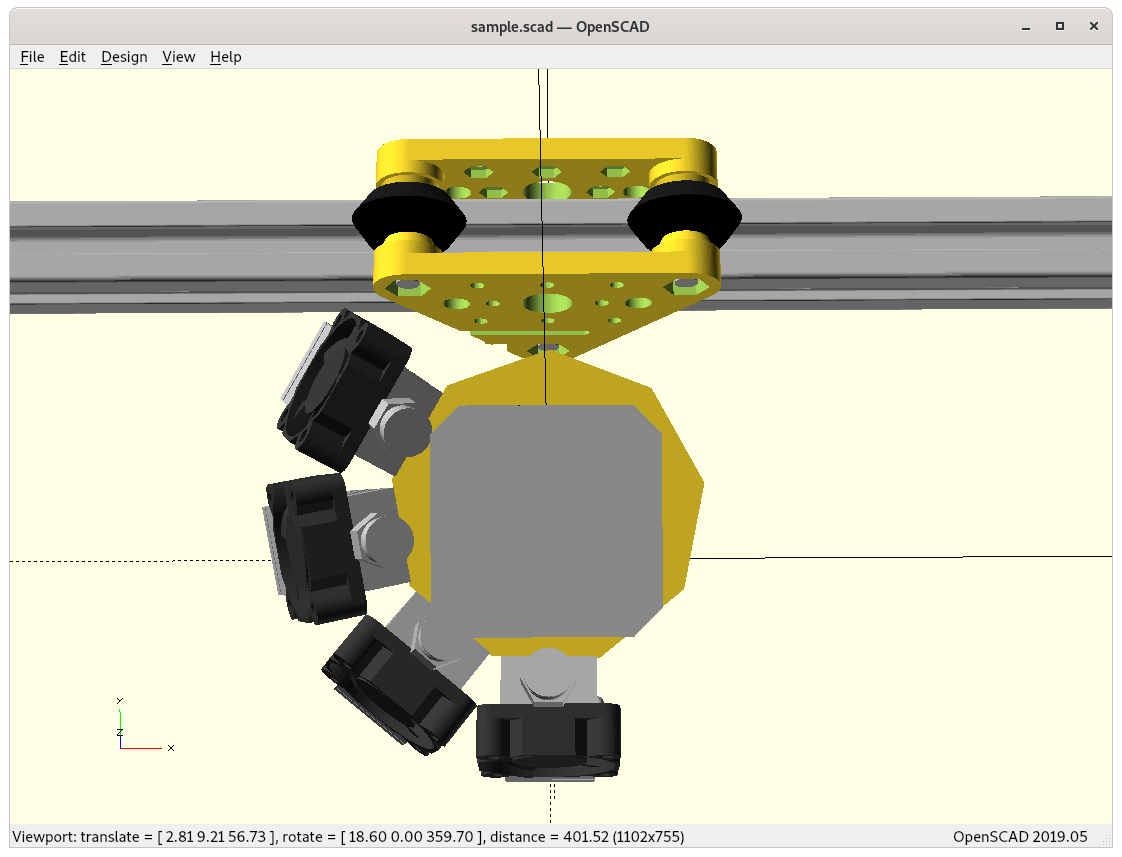
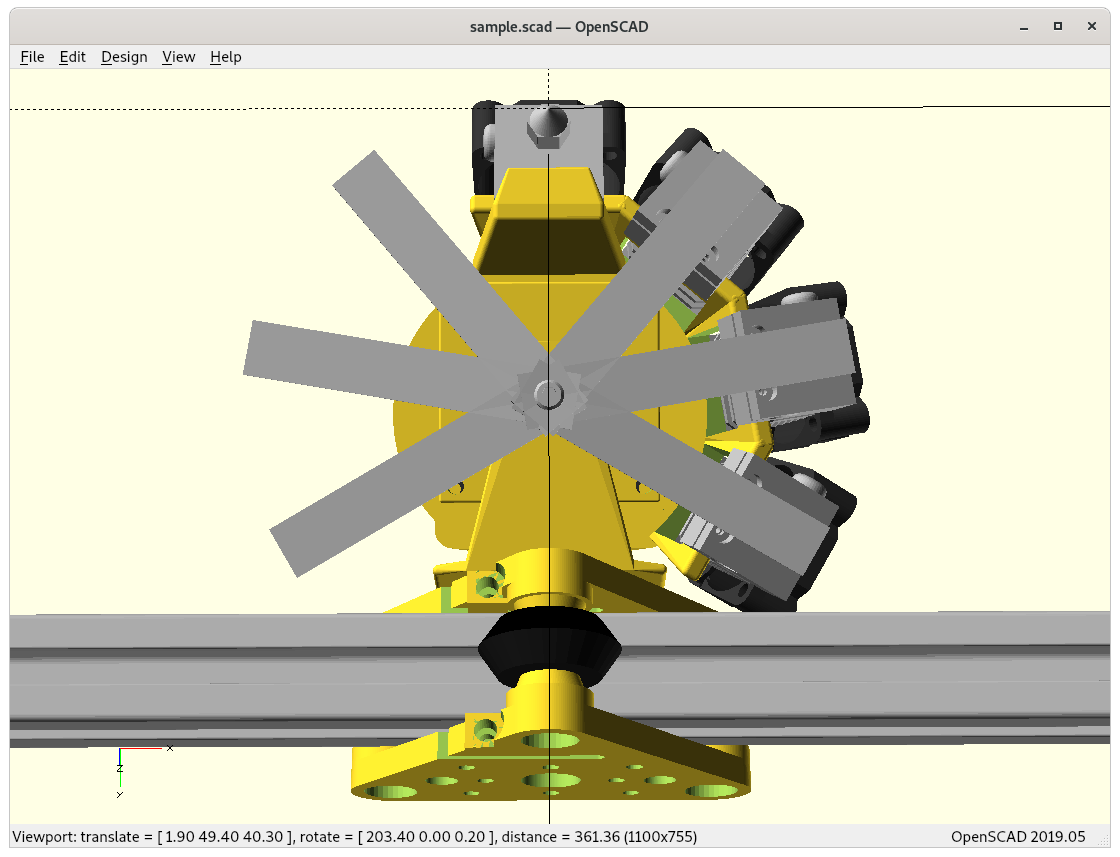
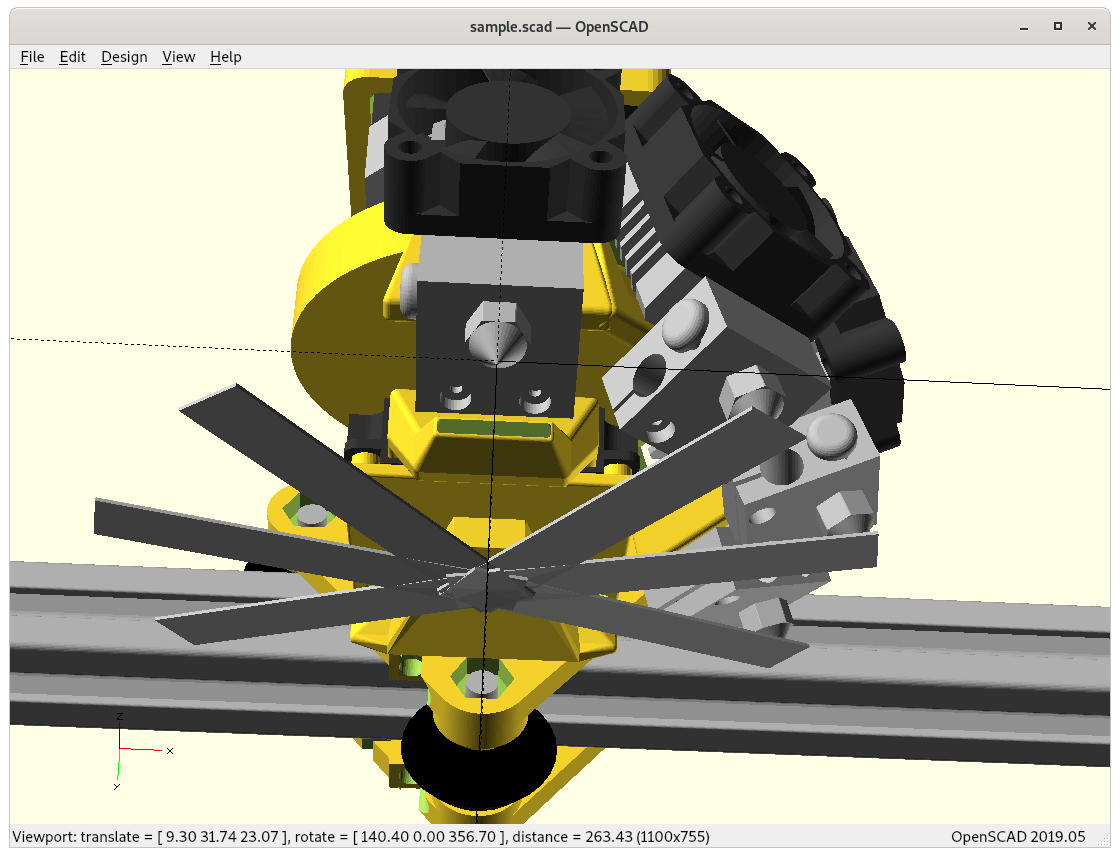
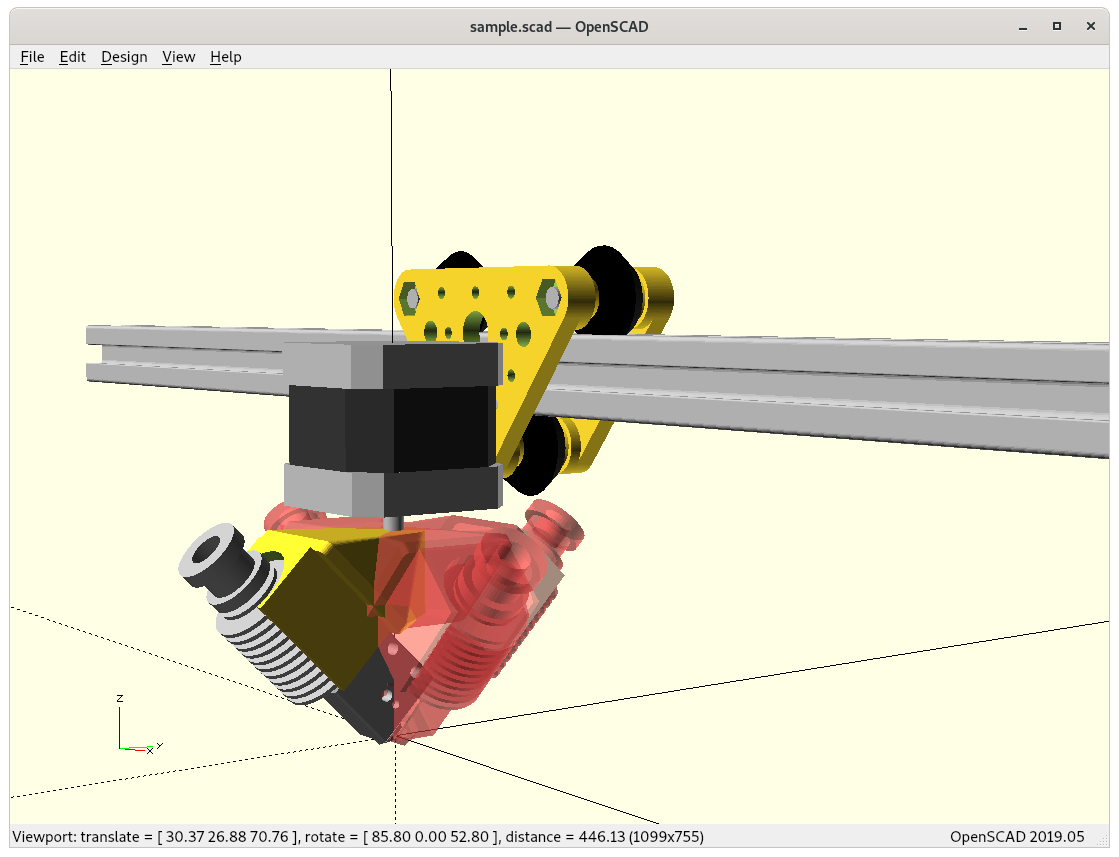
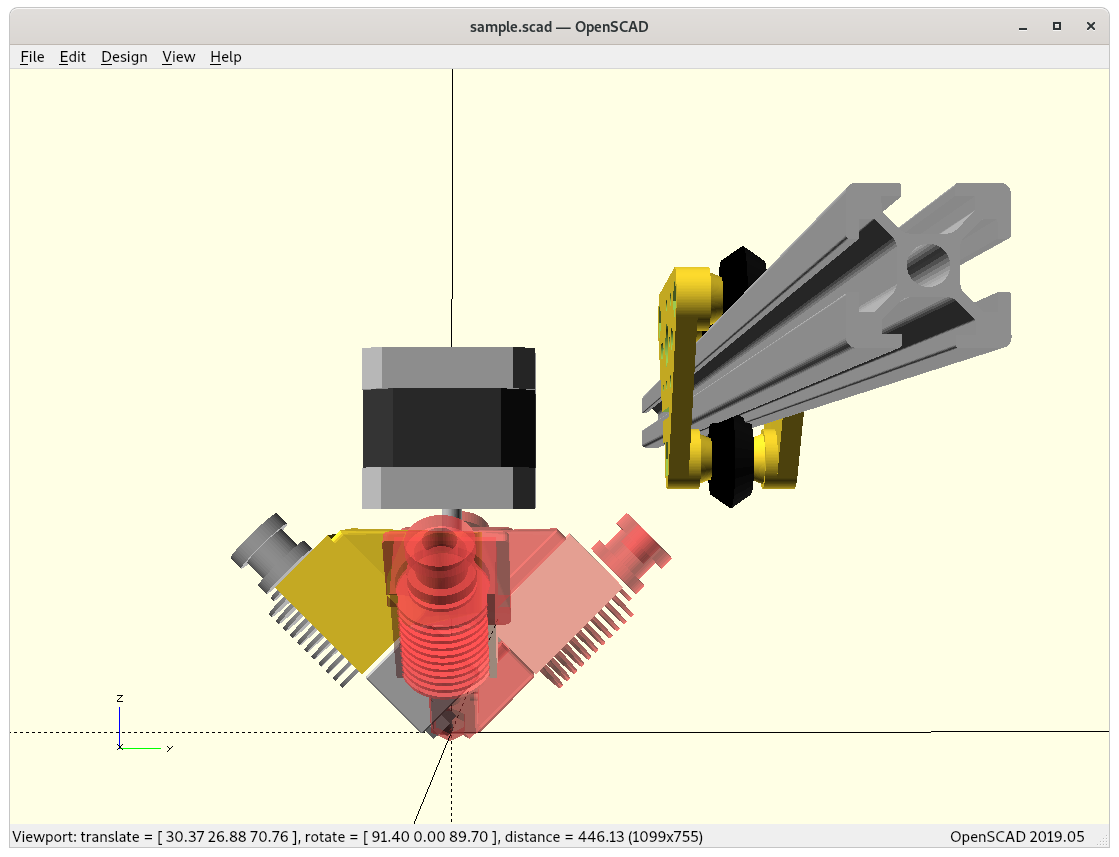
Status: inverse kinematics resolved and implemented in the firmware as well
Tilt rotation 0° ..180°Z rotation -180° .. 180°PAX 180 printhead mounted on Ashtar K (Draft)Heavy setup: PAX 90 printhead (2x NEMA17 37mm) mounted on Ashtar KHeavy setup: PAX 135 Dual Hinge printhead (2x NEMA17 37mm) Lightweight setup: PAX 135 Dual Hinge printhead (1x NEMA17 37mm 1x 28BYJ-48 with worm gear & cooling fan) mounted on Ashtar K
Updates:
2021/07/14: PAX inverse kinematics finally working on firmware level too
2021/05/25: using worm gear with 28BYJ-48 stepper motor to drive tilt rotation
2021/05/14: adding Duet 3 Mini 5+ Setup details (inverse kinematic not yet done in firmware), first motion tests made with 2x NEMA 17 (40mm)
2021/02/28: added animation PAX printing a 4-axis/RTN sliced overhang model
2021/02/17: added two brief animations of inverse kinematics
2021/02/08: inverse kinematics working, printhead mounted on Ashtar K as draft
2021/02/06: machine vs nozzle coordinates, forward/reverse transformation requirements, heatsink fan and part cooler added
2021/02/04: starting with collecting ideas and first drafts
Introduction
After I saw 5- and 6-axis printers at Formnext 2019 and particularly seeing the belt printers able to print 90° overhangs in one direction without support, and then RotBot by ZHAW, a Rotating Tilted Nozzle (RTN) printer, where the 90° overhangs in different directions (given some conditions) can be printed without support – so it was more natural to consider to make the tilting nozzle angle (trot) flexible as well, 0 – 180°.
0°: nozzle looking down, ordinary orientation with Z sliced layers 3D printing
45°: belt printer or rotating tilted nozzle (RTN) printer, printing 90° overhangs in one or more directions *)
90°: printing horizontally outward
135°: printing upward 45°
180°: printing upward entirely
*) Rotating Tilted Nozzle capability printing 90° overhangs depends on location and symmetric alignments, noslicing software yet available.
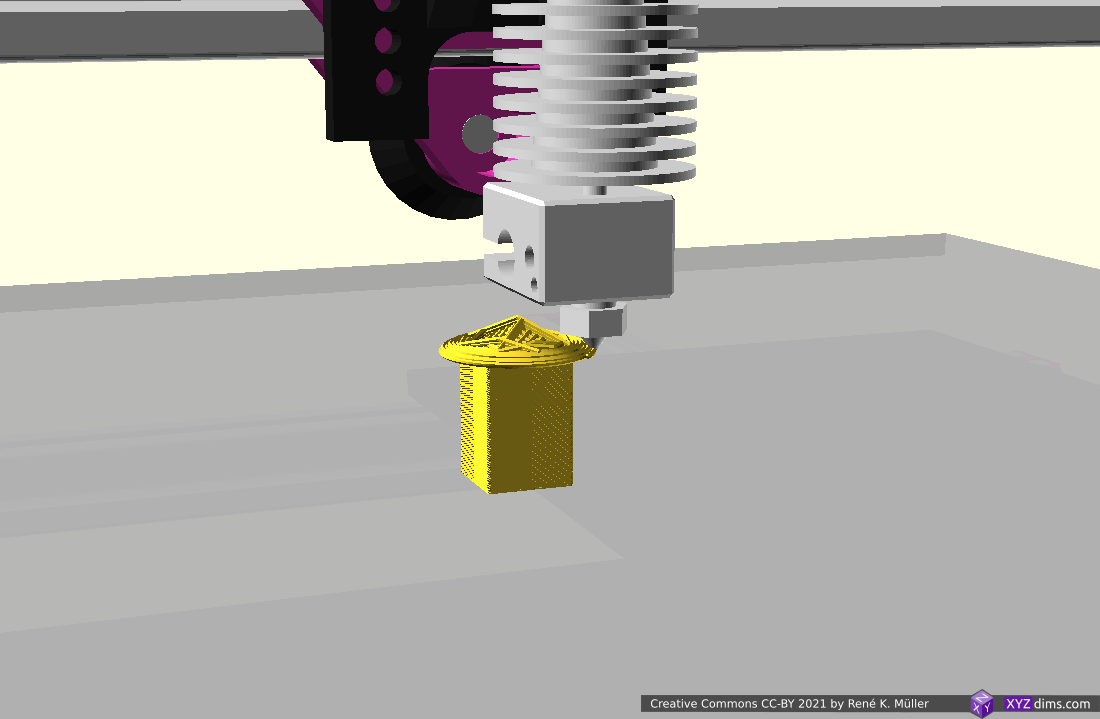
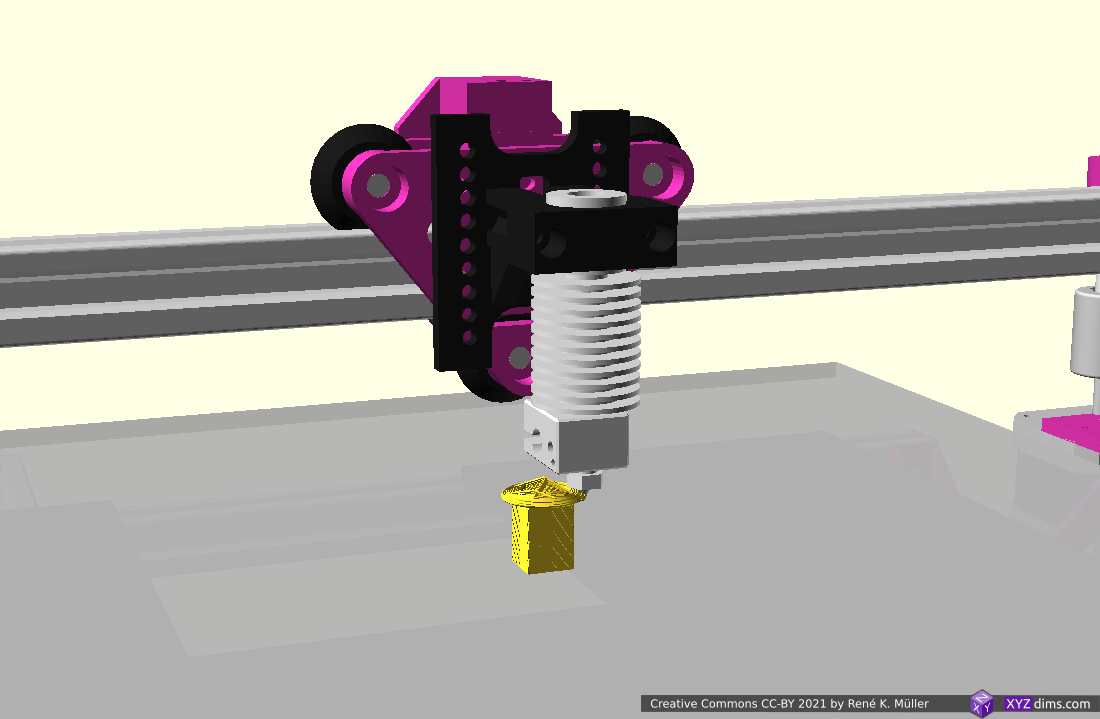
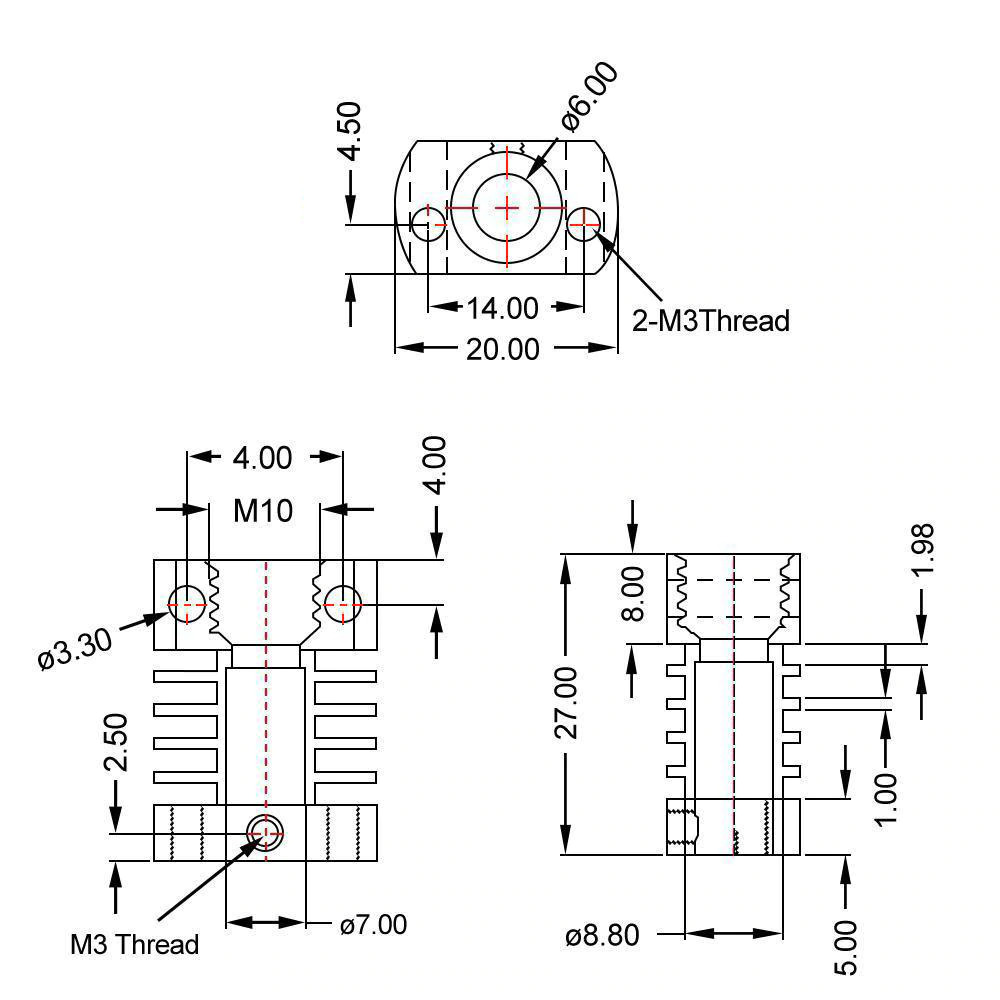
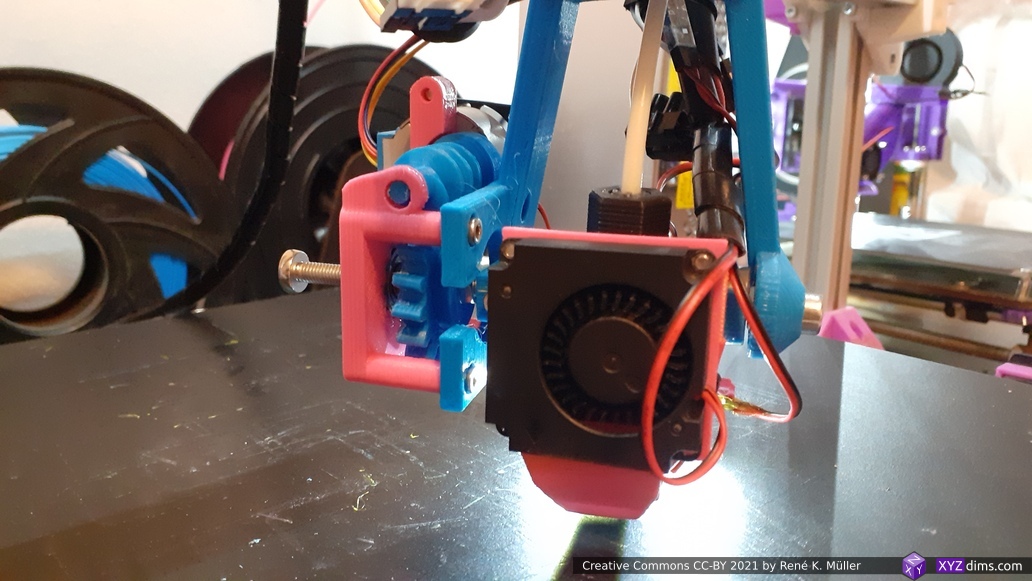
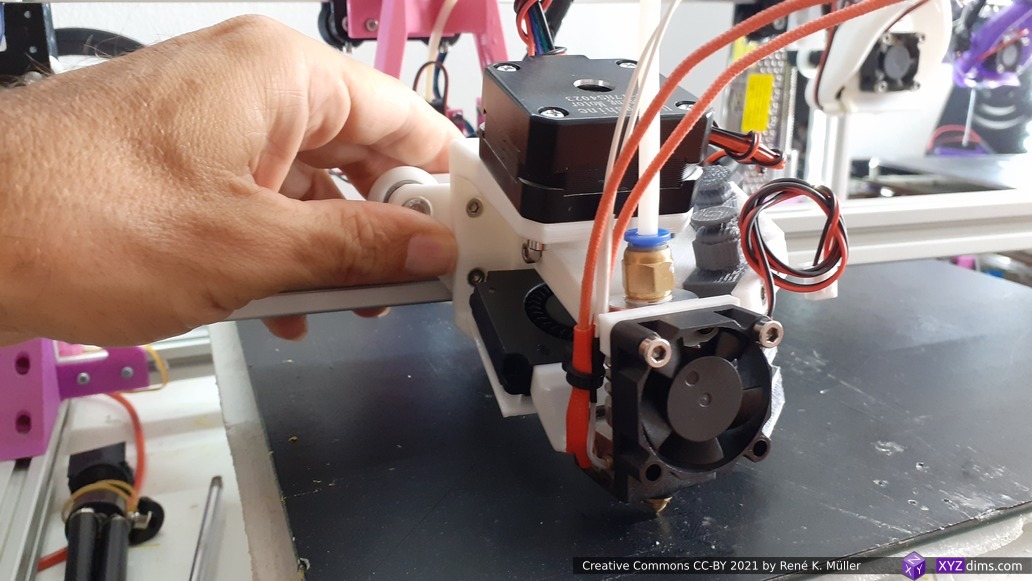
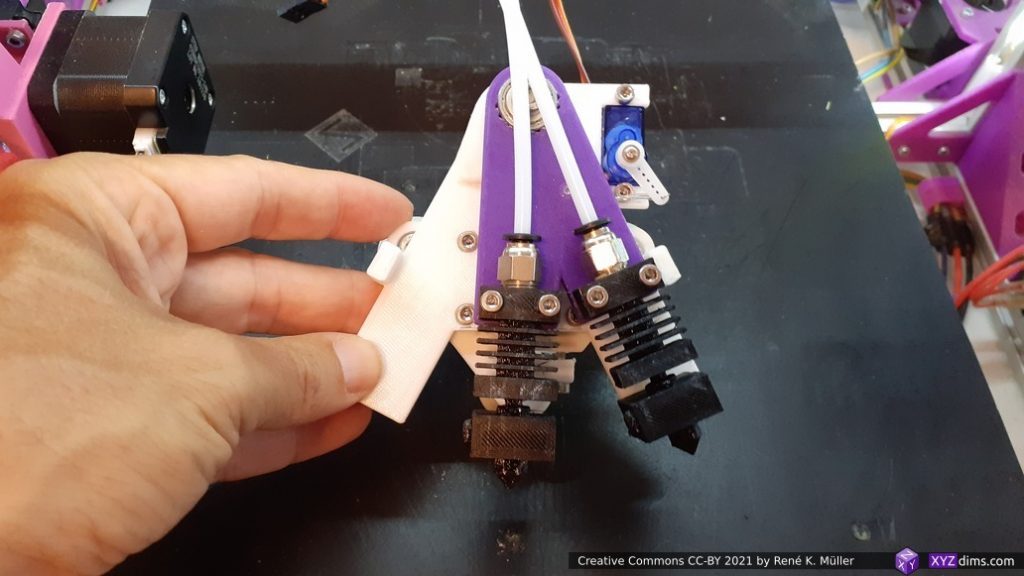
I chose Micro Swiss clone aka CR10 hotend as printhead as it’s small and compact, and easy to adapt and source.
Micro Swiss clone aka CR10 hotendsingle worm screw to attach heatbreak to heatsink
NEMA 17 37mm/263g: strong enough, but too heavy, my X gantry rattles and introduces ~ 1 to 2mm errors before swinging in; verdict: unusable
NEMA 17 23mm/131g: too weak, can’t hold position Z rotation (A) or tilt (B); verdict: unusable
28BYJ-48 33g: requires ULN2003 or adjustment to drive with stepper driver like A4988; verdict: unusable due the rotation and tilt tolerance; with a more elaborate gearbox might be usable
N20 BLDC motor with gearbox & encoder 10g: requires dedicated controller; verdict: <untested>
Different combinations:
2x NEMA 17 37mm/263g (Z rotation (A) + Tilt (B)): strong enough, but too heavy, my X gantry rattles and introduces ~ 1 to 2mm errors before swinging in; verdict: unusable unless entire X gantry/carriage is strengthened
2x NEMA 17 23mm/131g (Z rotation (A) + Tilt (B)): too weak, can’t hold position Z rotation (A) or tilt (B) on PAX 180/90 due PTFE with filament stiffness; verdict: unusable
1x NEMA 17 37mm/263g (Z rotation (A)): strong enough to position with PTFE with filament and cables + 1x 28BYJ-48 (Tilt (B)):
direct drive
PAX 90 arm (dual hinge): PTFE with filament stiffness prevents 0° tilt, but 15° at minimum: unreliable
PAX 180 arm (dual hinge): a bit better, but still problem to reliable position tilt from 0° to 90° and back to 0°: still unreliable
worm gear
PAX 90 arm (dual hinge): barely works (tilt: -5° to 85°)
PAX 180 arm (dual hinge): works so far (tilt: -20° to 170°)
Let’s look at bit closer to the new rotating axes implemented with direct drive NEMA 17 stepper motors:
Z rotation (aka Zrot) with
NEMA 17 37/40mm/263g long (45Ncm) or
NEMA 17 23mm/131g (13Ncm)
Tilt rotation (aka Trot) with
NEMA 17 20mm/140g (16Ncm) or
NEMA 17 23mm/131g (13Ncm)
both provide 1.8° (or optionally 0.9°) resolution per full step, or
8 microsteps (20% force) 0.225° @1.8°step (0.1125° @0.9°step) per microstep
Z rotation 9 Ncm (or 2.6Ncm)
T rotation 3.2 Ncm
16 microsteps (10% force) 0.1125° @1.8°step (0.0565° @0.9°step) per microstep
Z rotation 4.5 Ncm (or 1.3Ncm)
T rotation 1.6 Ncm
For now, for sake of simplicity, both axes are in direct drive – if precision requirements dictate a simple reduction gear 1:4 or 1:5 (see below for some more details).
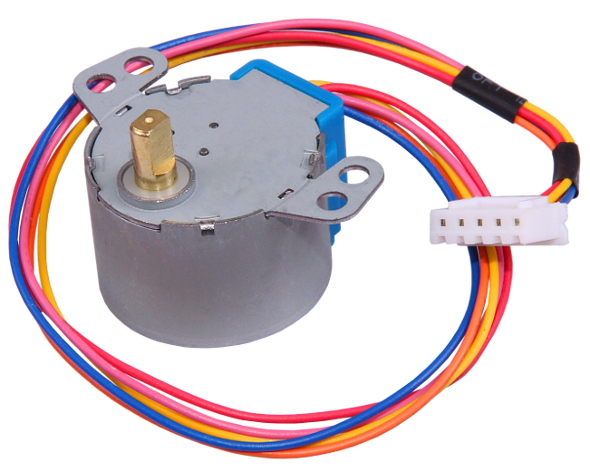
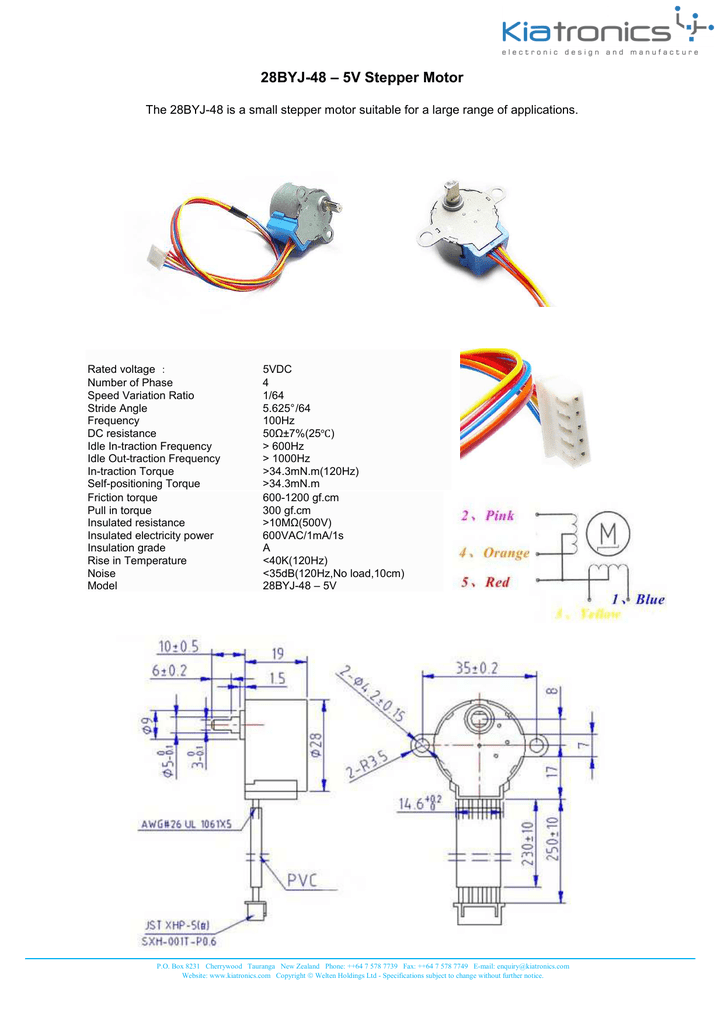
28BYJ-48
28BYJ-48 (33g)
With just 33g weight and easy to source this stepper motor is quite remarkable. With a small modification, the 28BYJ-48 can be driven in bi-polar mode and then connected with the existing stepper drivers.
apprx. 2-3° rotation backlash (last gear of the shaft has 31 tooths, 360° / 31 = 11.6°)
apprx. 0.5mm tolerance of the shaft itself, causing at the tip of the shaft > 1mm tolerance or margin
possible solutions:
add another gearbox in front and introduce more stable (longer) shaft (pros: still light solution, cons: more mechanical complexity)
worm gear: works
Even though it’s a low-cost stepper motor and introduces backlash and tolerances to take care of, the lightness of just 33g which is about 12.5% of the NEMA 17 40mm or 25% of NEMA 17 23mm while actually provide sufficient holding torque due the gears.
Duet 3 Mini 5+ config.g changes, using it just the tilt rotation (B):
M906 B200 ; set motor current (mA)
M360 B1 I0 ; turn off microstepping without interpolation
M92 5.66 ; 32 steps / revolution x 63.68395 = 2038 => 2038 / 360 deg => 5.66 steps / deg
The 200mA setting caused the motor to warm up to apprx. 50°C, so likely to reduce the current to 100mA – if a gearbox with a worm is used, likely the reduced current still provides sufficient torque (or alternatively add a small fan to cool the motor). So I went ahead to use a worm gear setup, as direct drive was too weak – for now I use PAX 180 (long arm) to have sufficient space to flex PTFE/filament on top of the printhead.
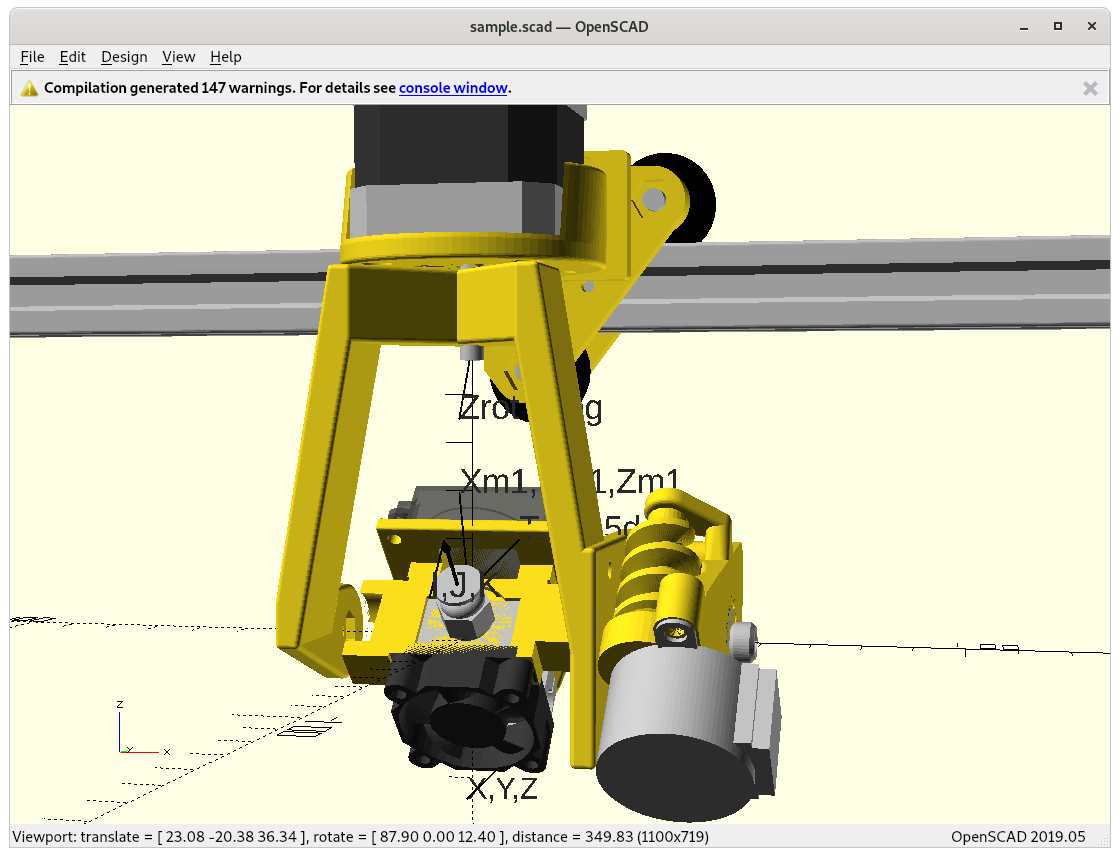
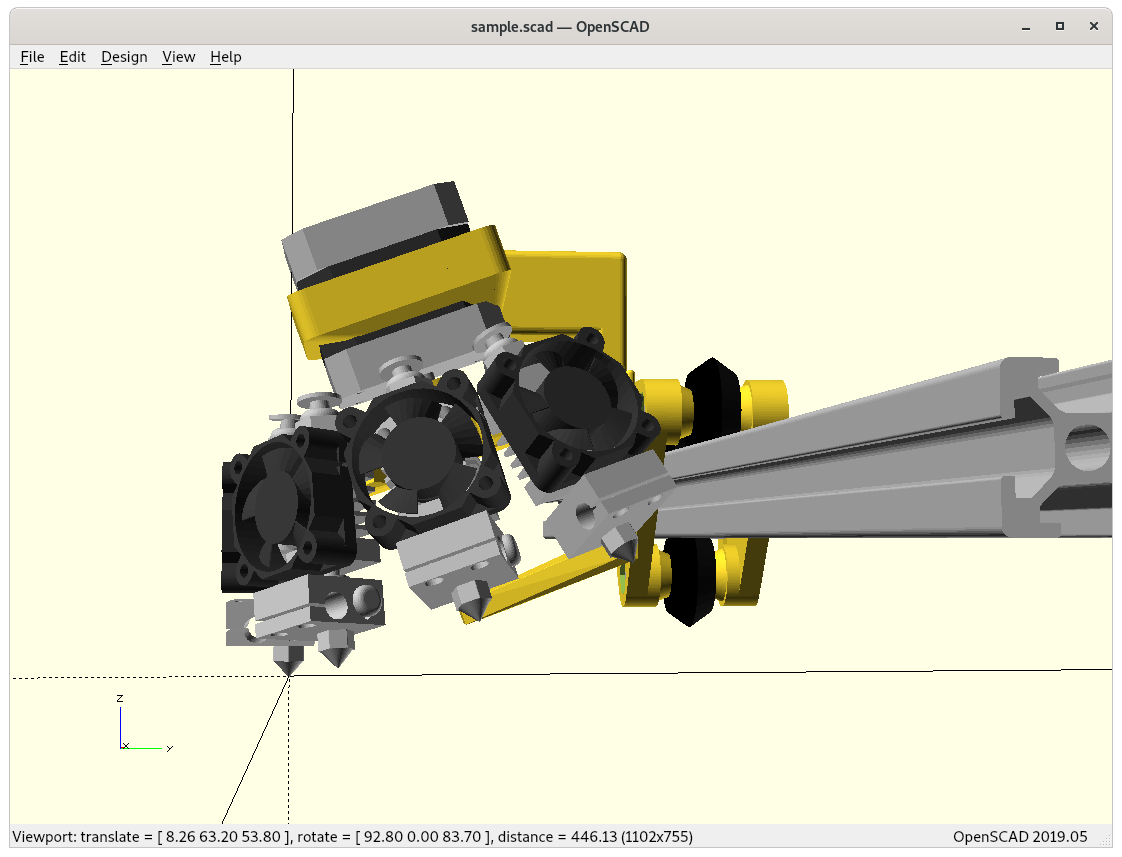
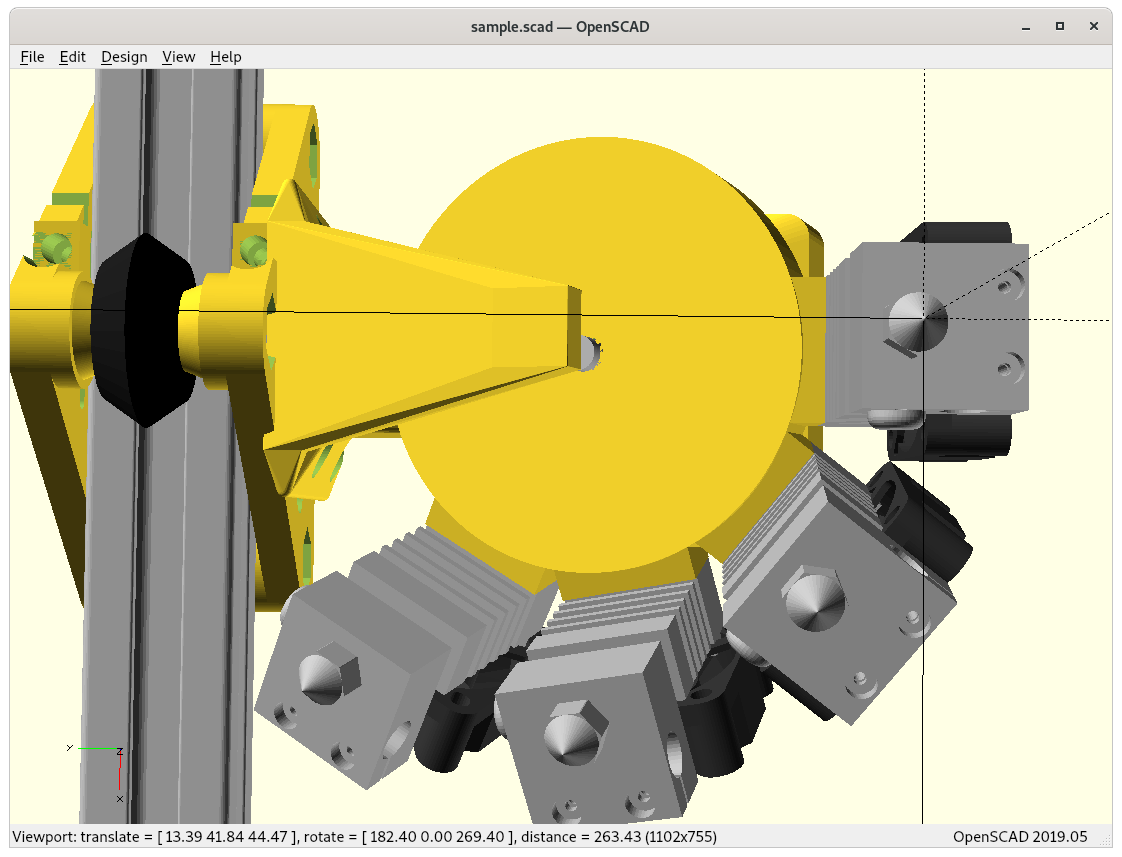
worm gear for 28BYJ-48 stepper motorPAX 90 with vertical worm gearPAX 135: acceptable PTFE bendingPAX 135 with NEMA17 37mm Z rotation, 28BYJ-48 stepper motor with worm gear for tilt rotationPAX 135 with NEMA17 37mm Z rotation, 28BYJ-48 stepper motor with worm gear for tilt rotation
In 5 axis CNC context there are multiple configurations possible such as table/table, head/head and table/head – as I came from the Rotating Tilted Nozzle (RTN) the extra 2 axis are added to the head, hence head/head configuration.
Tilt rotation 0 .. 180°
The Trot of 0° is the equivalent of ordinary 3D printer with top/down oriented nozzle, the 45° the belt printer or RotBot/RTN, and 90° printing vertical walls with the nozzle perpendicular, and 90-135° printing up-side down – I’m not sure if 135-180° is that useful, perhaps making underlying structures really smooth. For now I keep the tilt rotation from 0° to 180° even though I think I’m going to use 0-135° in real life application when the actual print procedure is developed, planar or non-planar slicing.
Dual Hinge
Mathematics
5 Axis Kinematics
LinuxCNC 5 Axis kinematics describes the notations and provides a starting point and I realized quickly that in CNC context the 5 axis operations is quite thoroughly explored, but much fewer focus on 5 axis additive manufacturing yet (see below at References).
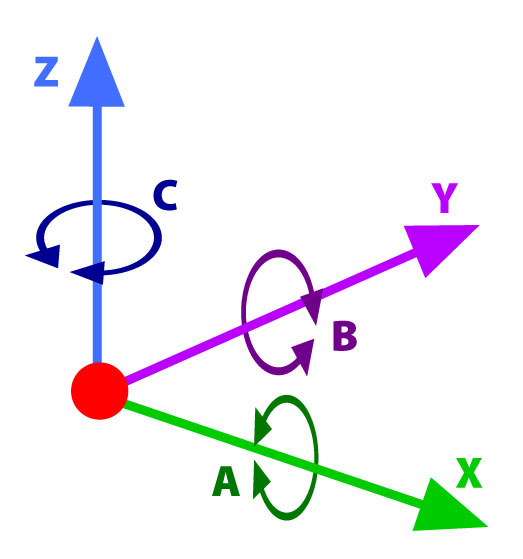
In order to reflect the rotation per axis, the notion A, B and C are adopted, which can be described in OpenSCAD as
translate([X,Y,Z]) rotate([A,B,C]) ...
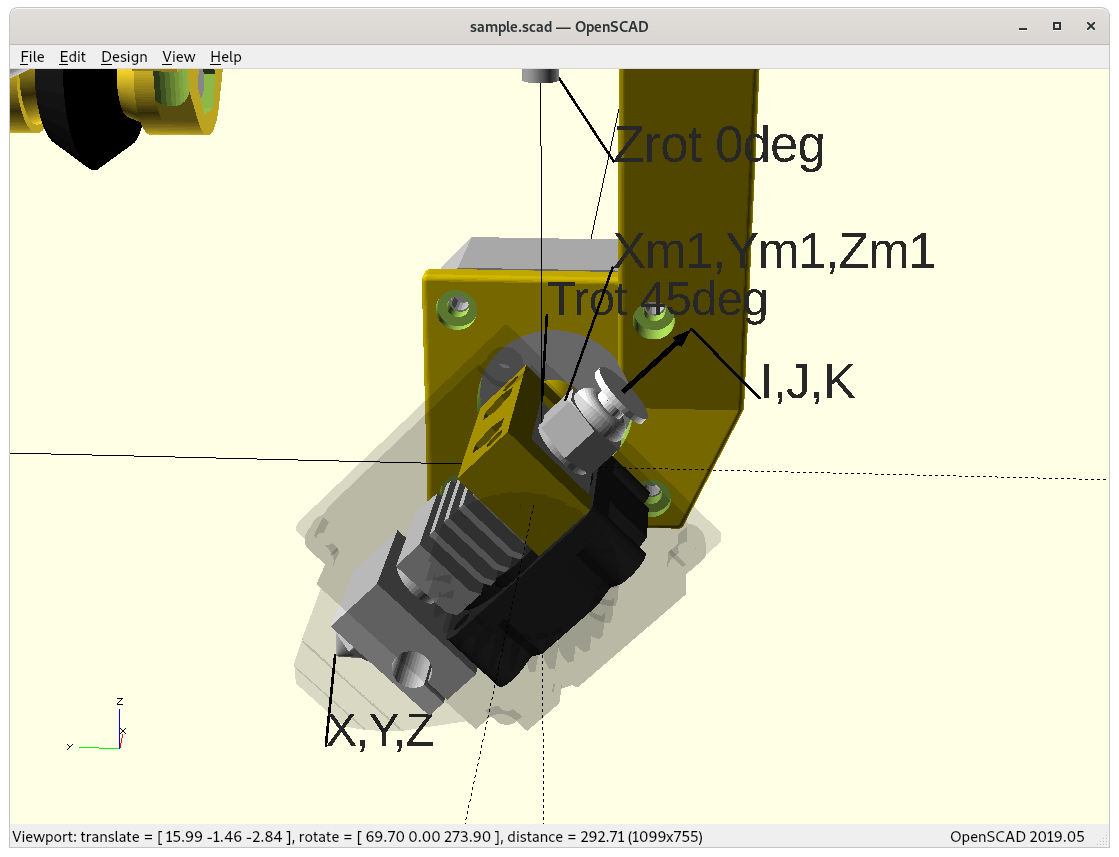
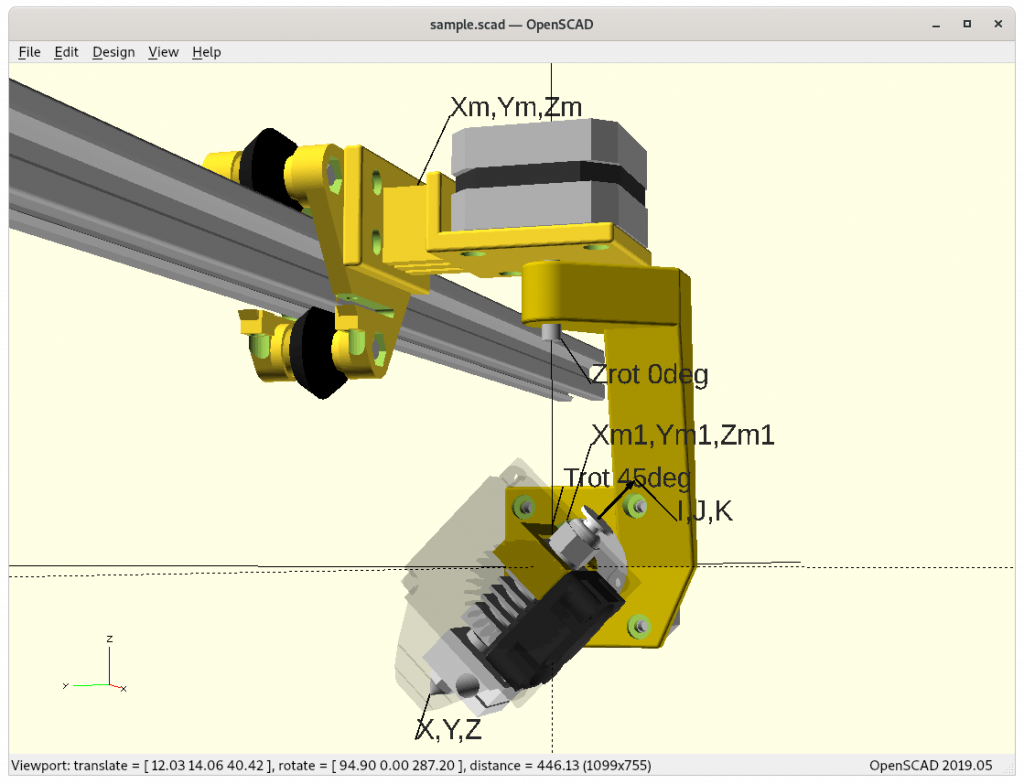
X,Y,Z (tool coordinate) and I,J,K (tool vector)
Further the CNC notion I, J and K are used as tool vector, the way the nozzle points away. G-code supports natively G1 X Y Z I J K which is machine independent. The machine specific firmware then computes the machine coordinates and rotating angles so the machine tool tip reaches those coordinates with that particular tool vector.
Tool/Nozzle vs Machine Coordinates
Absolute coordinates X, Y, Z of the nozzle tip and angles Zrot, Trot and given the Z rotation arm there is a mapping required to Xm, Ym, Zm with same Zrot, Trot.
The forward transformation in OpenSCAD:
translate([Xm,Ym,Zm]) rotate([0,0,Zrot]) rotate([Trot,0,0]) translate([0,0,-45]) sphere(0.1); // nozzle tip at X, Y, Z with I, J, K
45mm vertical offset of tilt axis to nozzle tip
or expressing it as a list:
at 0, 0, 0 (origin)
translate([Xm,Ym,Zm])
rotate([0,0,Zrot])
rotate([Trot,0,0])
translate([0,0,-45])
at X, Y, Z
The -45 is the 45mm vertical offset of the tilt rotation to the tip of the nozzle.
In OpenSCAD it’s the reverse order, and enumerate matrices (used further below):
at X, Y, Z
translate([0,0,45]) aka M1
rotate([-Trot,0,0]) aka M2
rotate([0,0,-Zrot]) aka M3
translate([ Xm, Ym, Zm ]) aka MR, by inverting matrix the Xm, Ym, Zm can be extracted
at 0, 0, 0 (origin)
Each transformation can be represented by a 4×4 matrix, the sequence of transformations are the multiplication of such, and when multiplying symbolical a single 4×4 matrix will result. When keeping the symbolical notion the inverse transformation can be obtained with one operation and getting Xm, Ym, Zm from X, Y, Z, Zrot, Trot, and that very computation needs to be done in the firmware and controller in order to process X, Y, Z, Zrot, Trot as G1 X.. Y.. Z.. A.. B.. and the internally Xm, Ym, Zm is processed to achieve that tool coordinate; A = Zrot, B = Trot .
G-code
G1 X.. Y.. Z.. A.. B..
Firmware
Zrot = A Trot = B Xm, Ym, Zm computed via reverse/inverse transformation on the controller
Numerical Inverse Transformation
Just for sake of confirming the reverse/inverse transformation utilizing m4.scad:
so MR contains the inverse matrix of the previous transformations, so I can extract the translation vector, the 4th column [ MR[0][3], MR[1][3], MR[2][3] ] or m4trv(MR) to compensate X, Y, Z, Zrot, Trot -> Xm, Ym, Zm:
Perhaps it’s worth to actually calculate symbolical forward and inverse transformation matrix using e.g. Matlab or alike to have transformations in one operation instead multiplying three matrices and inverting it – depending what hardware is used as controller multiplying individual matrices is faster than trying to have a complex single step matrix construct.
Although Marlin firmware supports Delta printer with complex delta inverse kinematics, not sure I can add mine as well, or I have to go with Duet RepRap firmware which seems more suitable (see notes below).
Nozzle Precision from Trot
The 45mm offset of the last rotation massivly contributes to the loss of nozzle position resolution:
s = 2 π * r / 360 = section length per degree
s = π * 45mm / 180 = 0.785mm/° which means:
8 microsteps with 1.8° full step: 0.225°/microstep => 176.7μm/microstep
16 microsteps with 1.8° full step: 0.1125°/microstep => 88.3μm/microstep
8 microsteps with 0.9° full step: 0.1125°/microstep => 88.3μm/microstep
16 microsteps with 0.9° full step: 0.0565°/microstep => 44.4μm/microstep
so the direct drive using the shafts of the NEMA 17 will provide OK resolution, but for anything a bit more serious, a reduction gear might be worth to use.
G-code & Firmware
As I likely will generate machine independent G-code as G1 X Y Z I J K, the slicer stage will likely operate in X, Y, Z and Zrot and Trot as well – so we end up with a data pipeline like this:
Slicer: X, Y, Z, Zrot, Trot
G-code: G1 X Y Z I J K
Firmware: X Y Z I J K => Xm, Ym, Zm and I J K => Zrot, Trot
Alternatively, instead using I J K notion use the G-code A and B as two rotational axes as Duet RepRap Firmware offers G1 X Y Z A B then it’s a bit simpler:
Slicer: X, Y, Z, Zrot=>A, Trot=>B
G-code G1 X Y Z A B
Firmware: X Y Z A B => Xm, Ym, Zm and A=>Zrot, B=>Trot
Reviewing existing slicer/printing software to see which notion is more suitable, and perhaps cover both to stay flexible.
From Xm, Ym, Zm, Zrot, Trot to X, Y, Z
Issues to Resolve
Bowden tube- & cable management: properly resolve it, guides etc.
Develop the transformation/inverse kinematics X, Y, Z, Zrot, Trot <=> Xm, Ym, Zm, Zrot, Trot as well X, Y, Z, I, J, K <=> Xm, Ym, Zm, Zrot, Trot as required for slicing, and firmware stage, done
Calculate the precision of X, Y, Z in relation of Xm, Ym, Zm and Zrot, Trot, whether or how the motor resolution affect axes => getting a grasp how the overall precision of the final setup
Direct drive mechanical precision with 8/16 microsteps, repeatability, and heat dissipation from motor (see tweet)
Marlin firmware capabilities, as it support Delta printers, inverse kinematics (IK) calculations seem supported well, question is how simple to add my own custom IK as well
printing: recognize model features or base design on seams or boundaries, like OPENCASCADE (STEP/IGES support)
printing: use vertical slicing as fallback, given no other printing method is suitable
recognize rotational objects: print from inside out like with a lath but adding material
detect steep overhangs, find proper way to print them
collision detection, e.g. tilt rotation becomes available at a certain Z level as below the upside looking nozzle will touch the build plate with the opposite end – the slicing/print software must be aware of the printhead geometry to calculate what’s possible to print and how
Considerations
Pros
many new ways to print in (almost) all directions
hopefully print 90° and more overhangs without support at all
Cons
significant mechanical complexity
mechanical limitations arise with new freedom of rotation of printhead
collision detection becomes essential which in Z sliced layers is not an issue at all
significant software complexity, no current 3D printing software available to take advantage of 5 axis printing
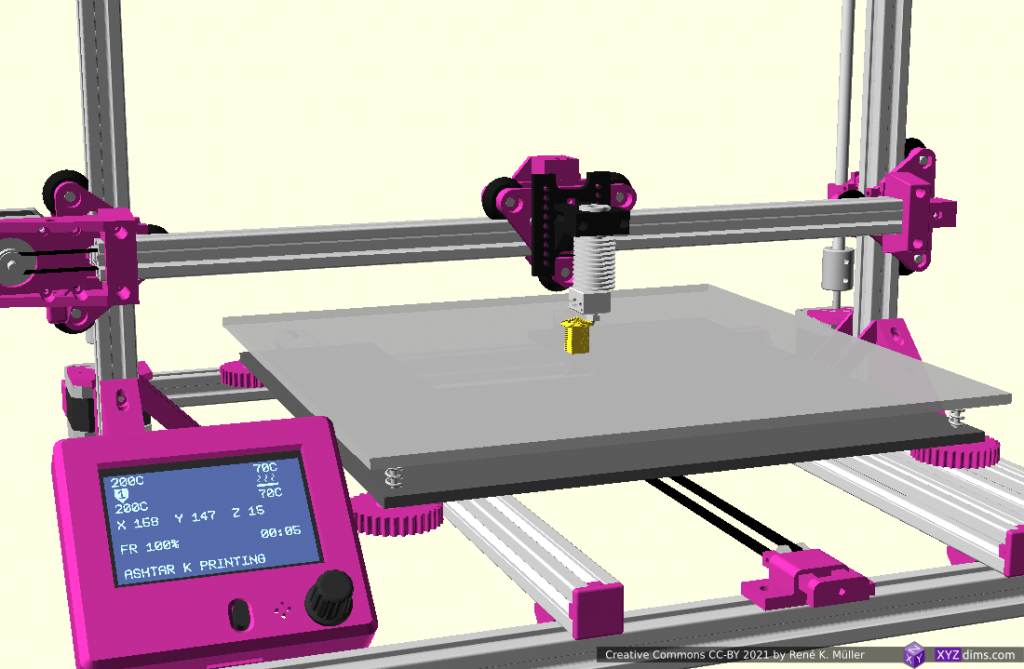
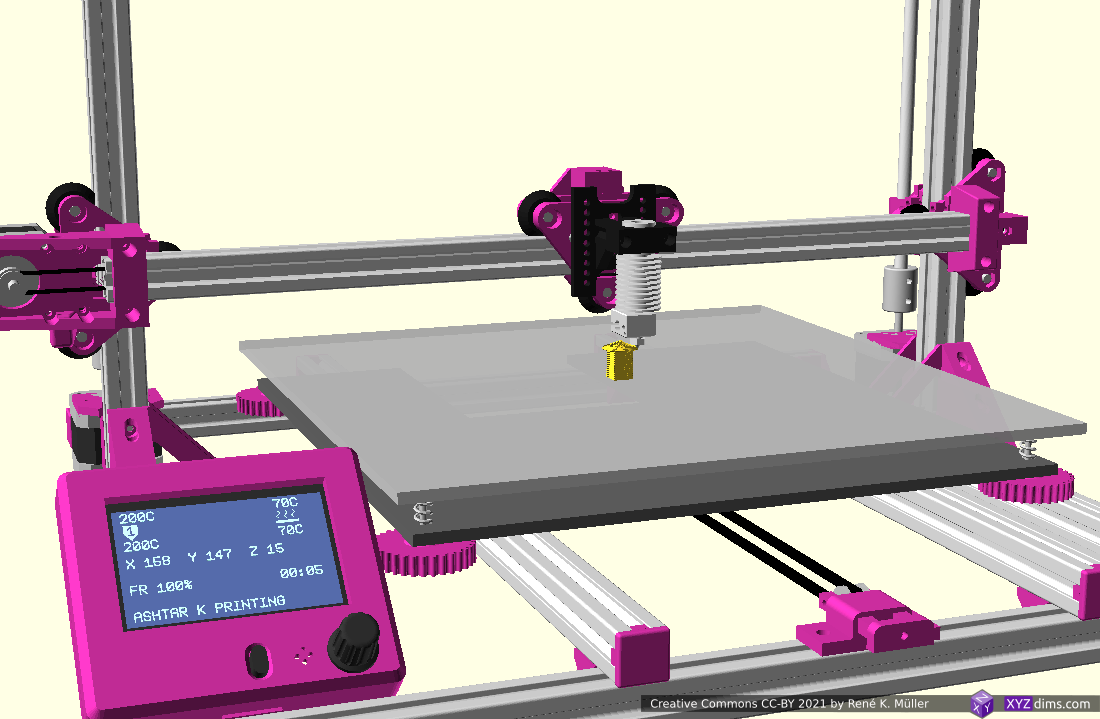
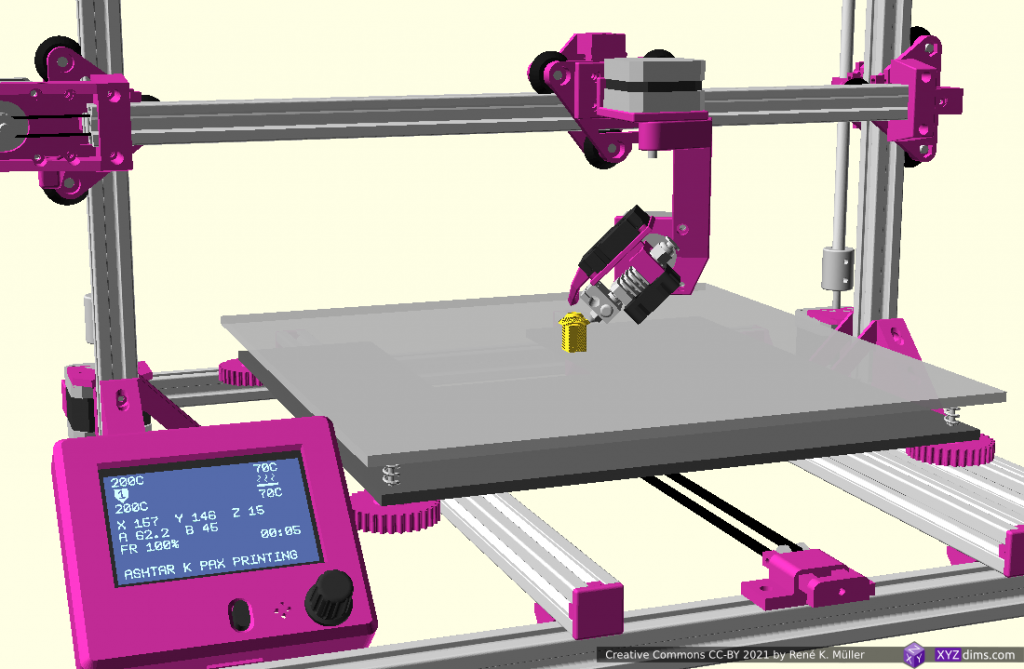
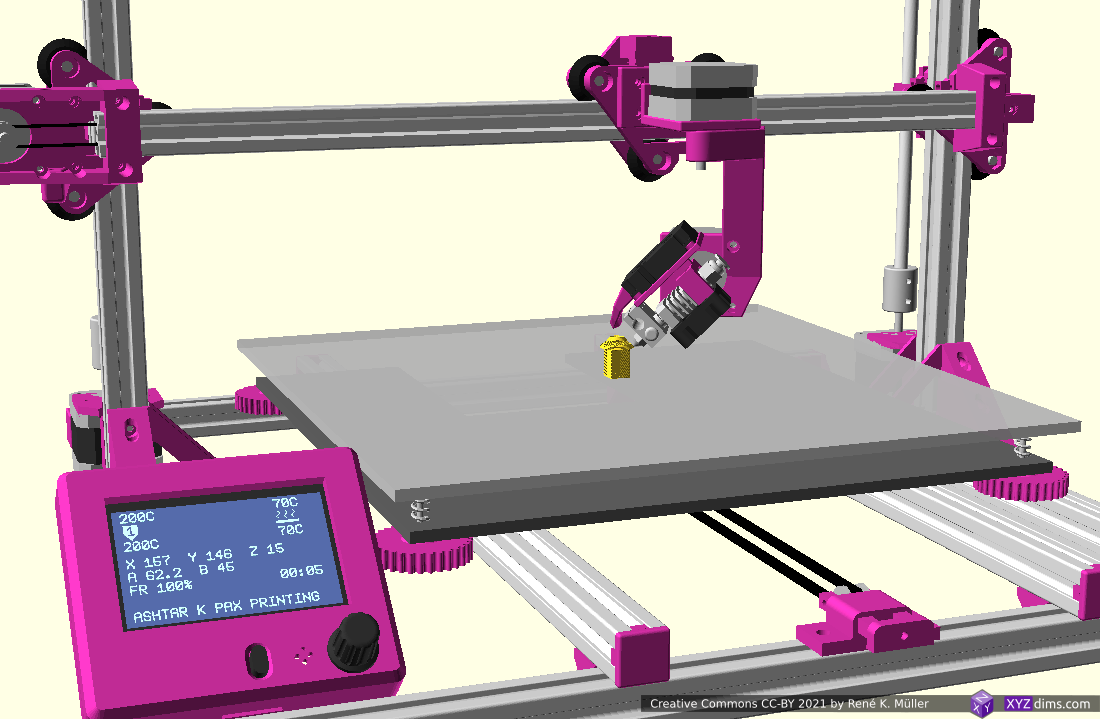
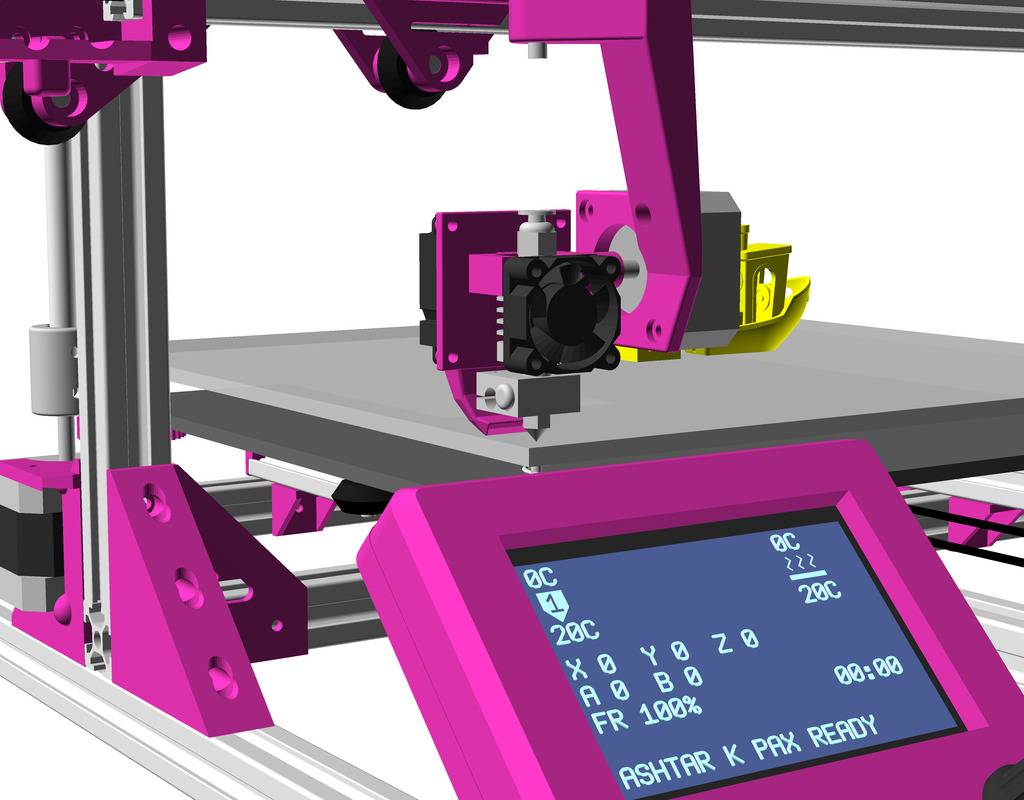
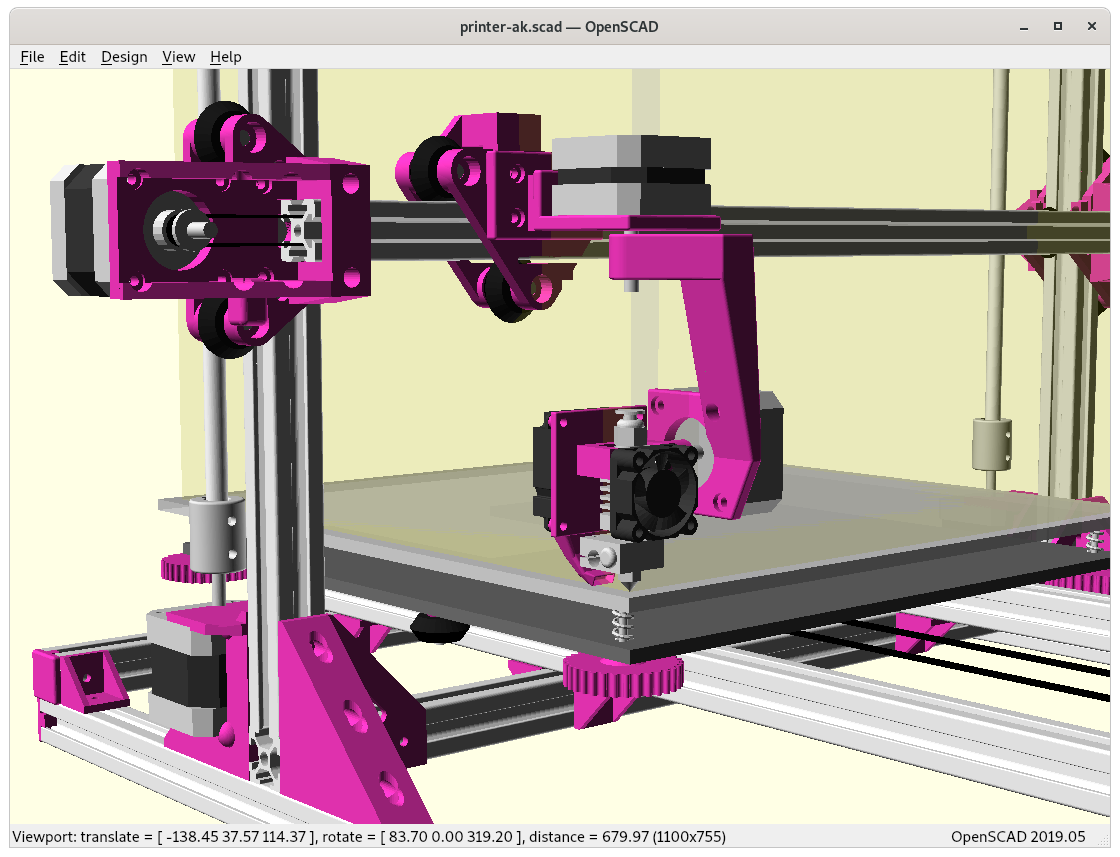
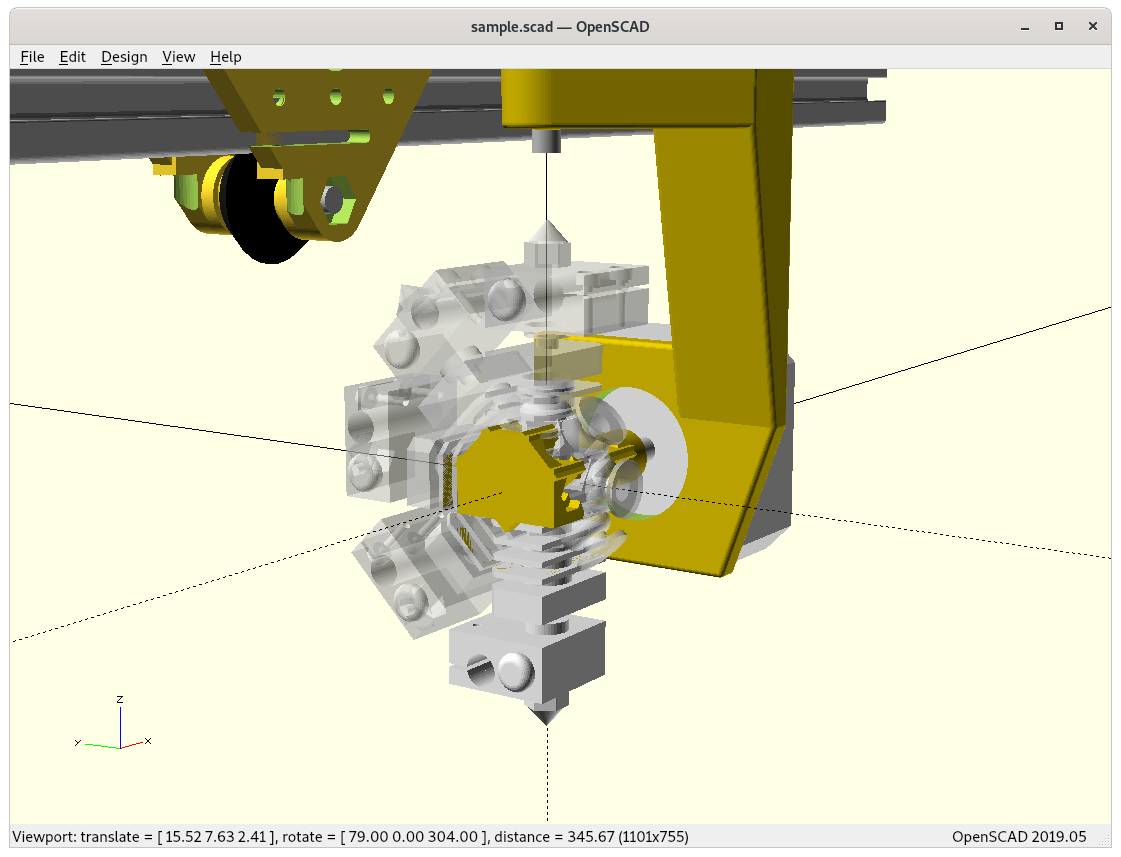
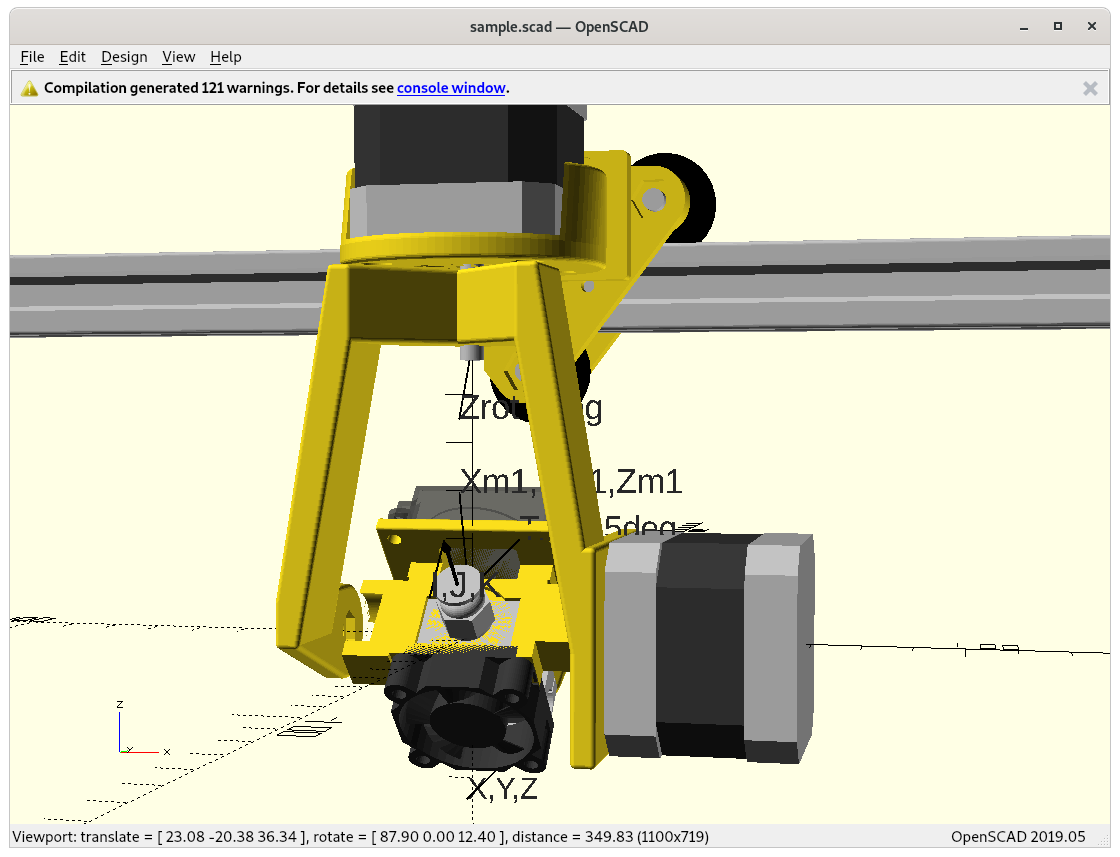
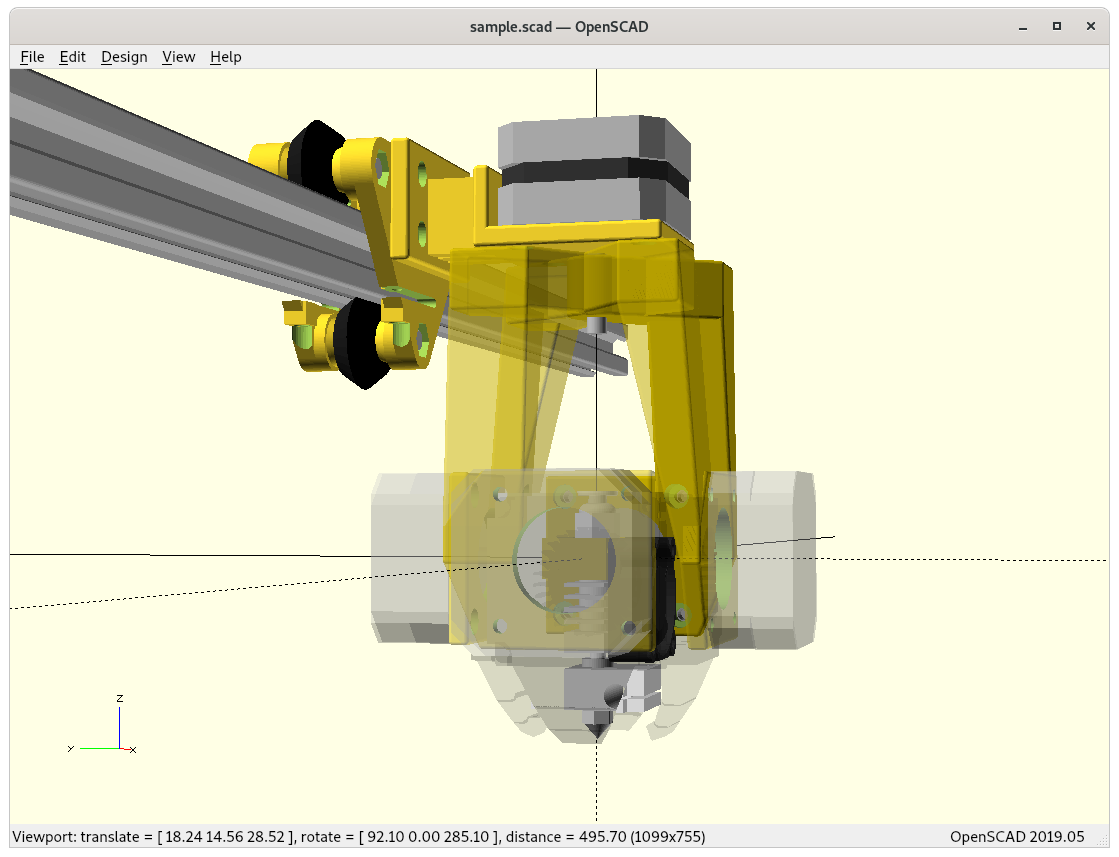
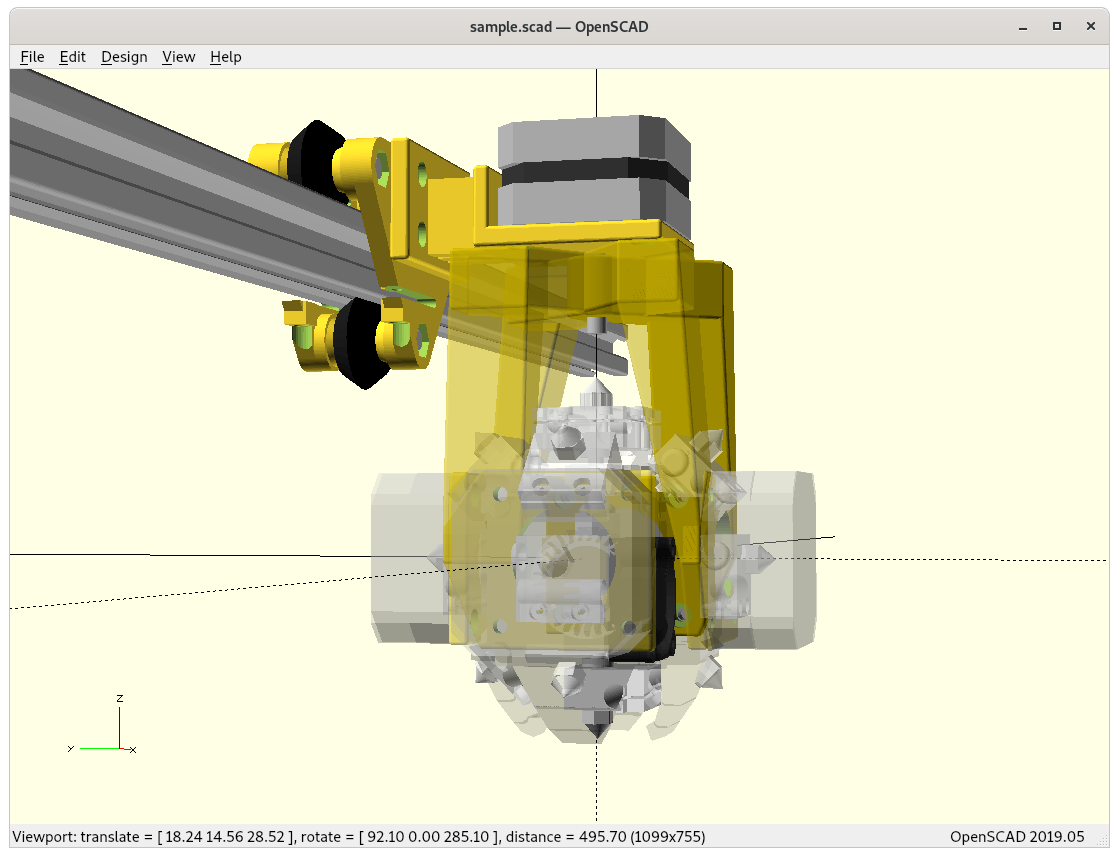
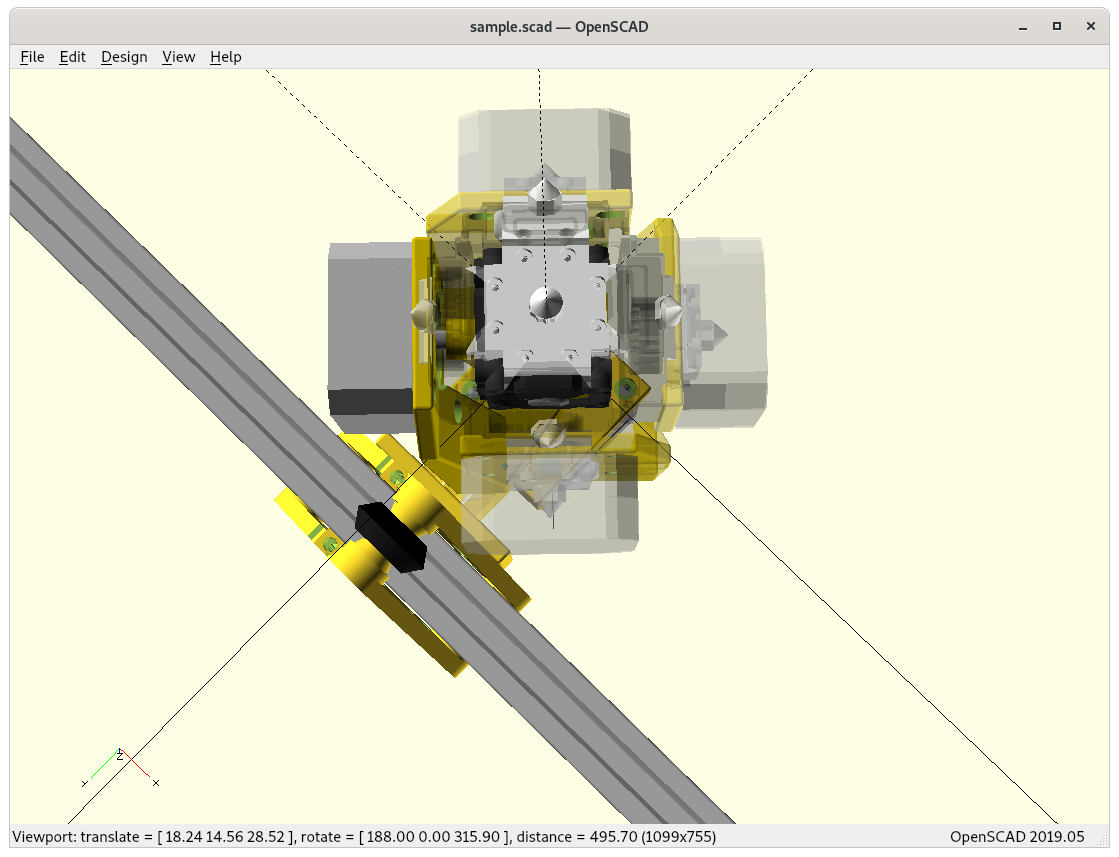
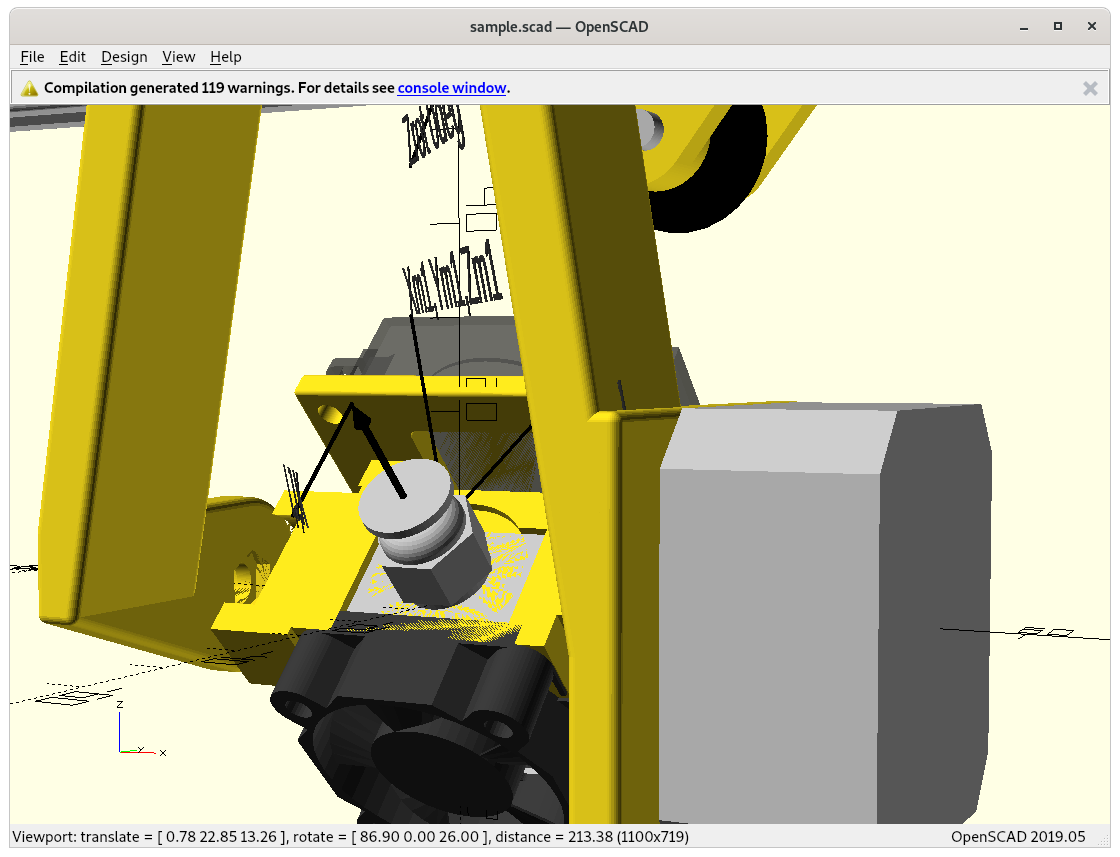
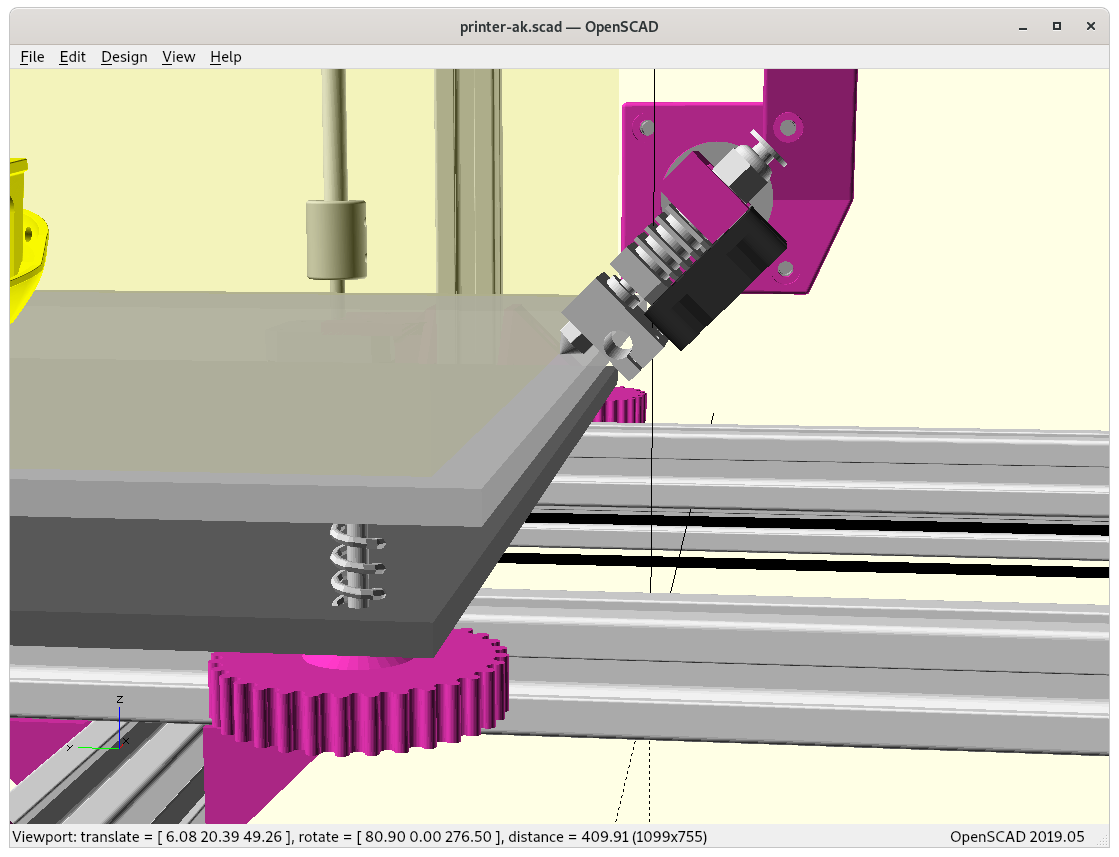
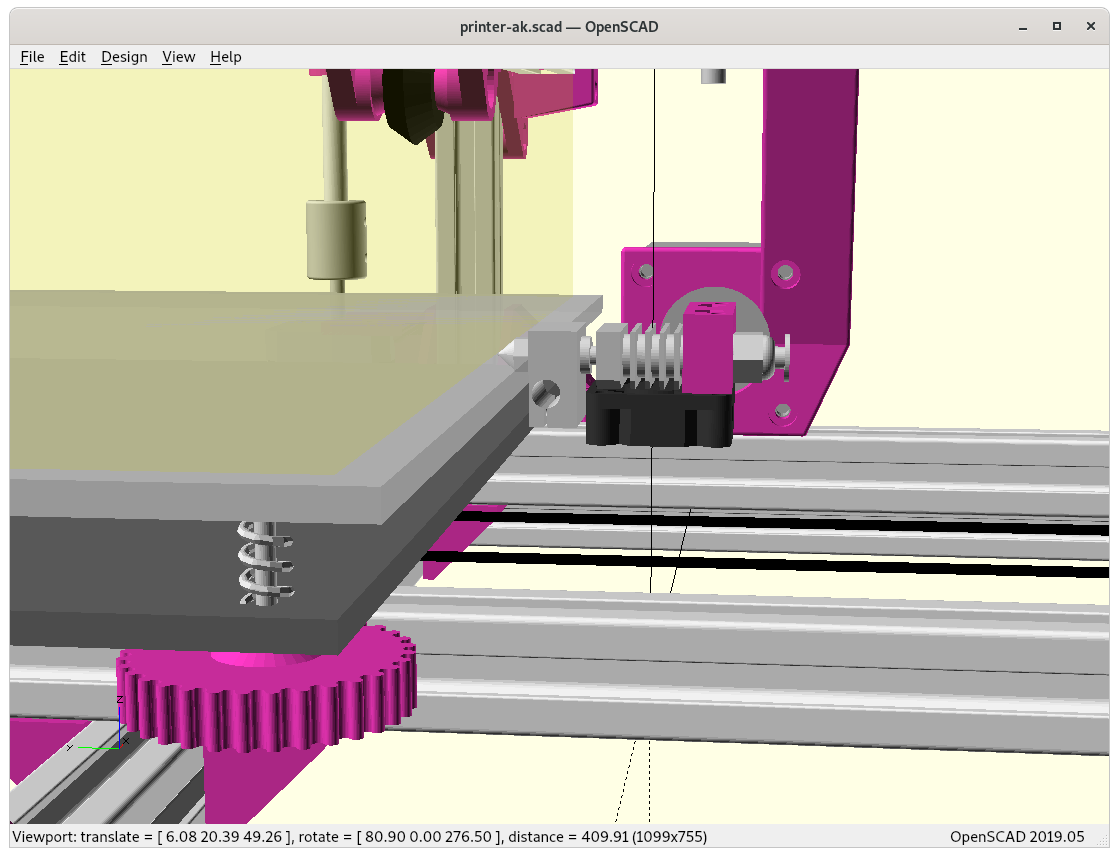
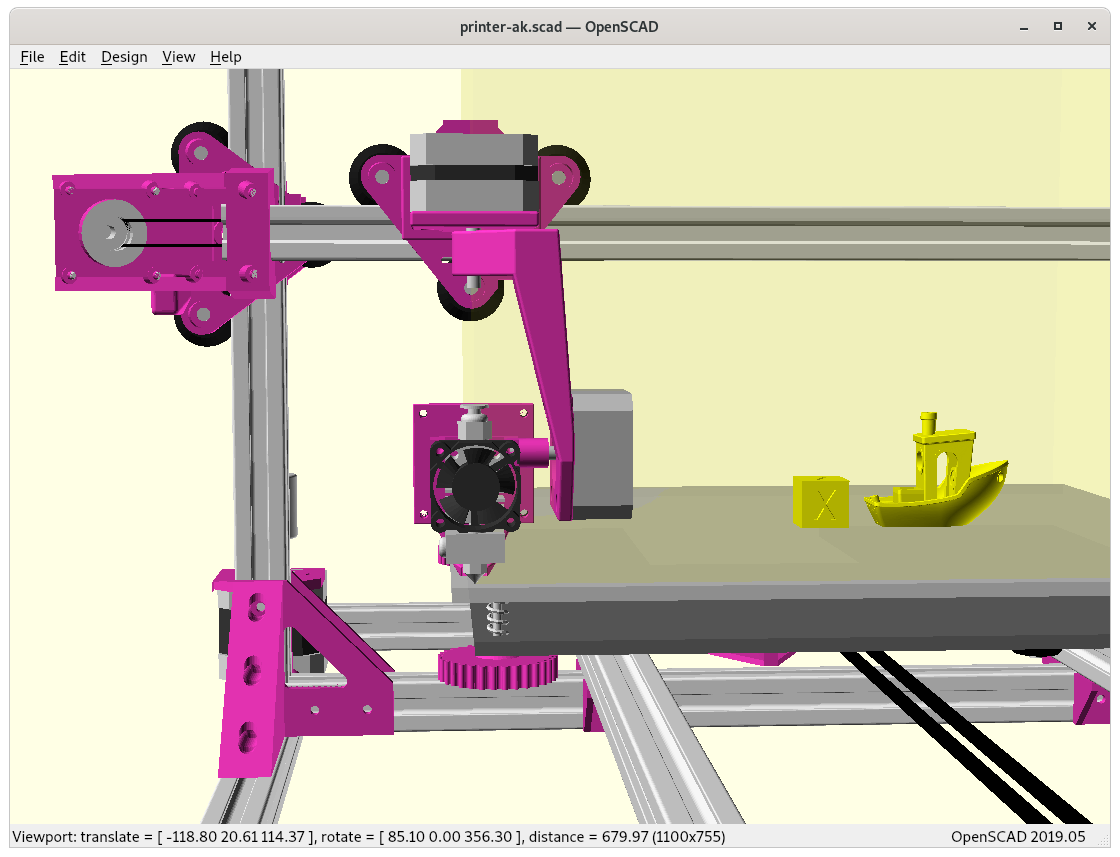
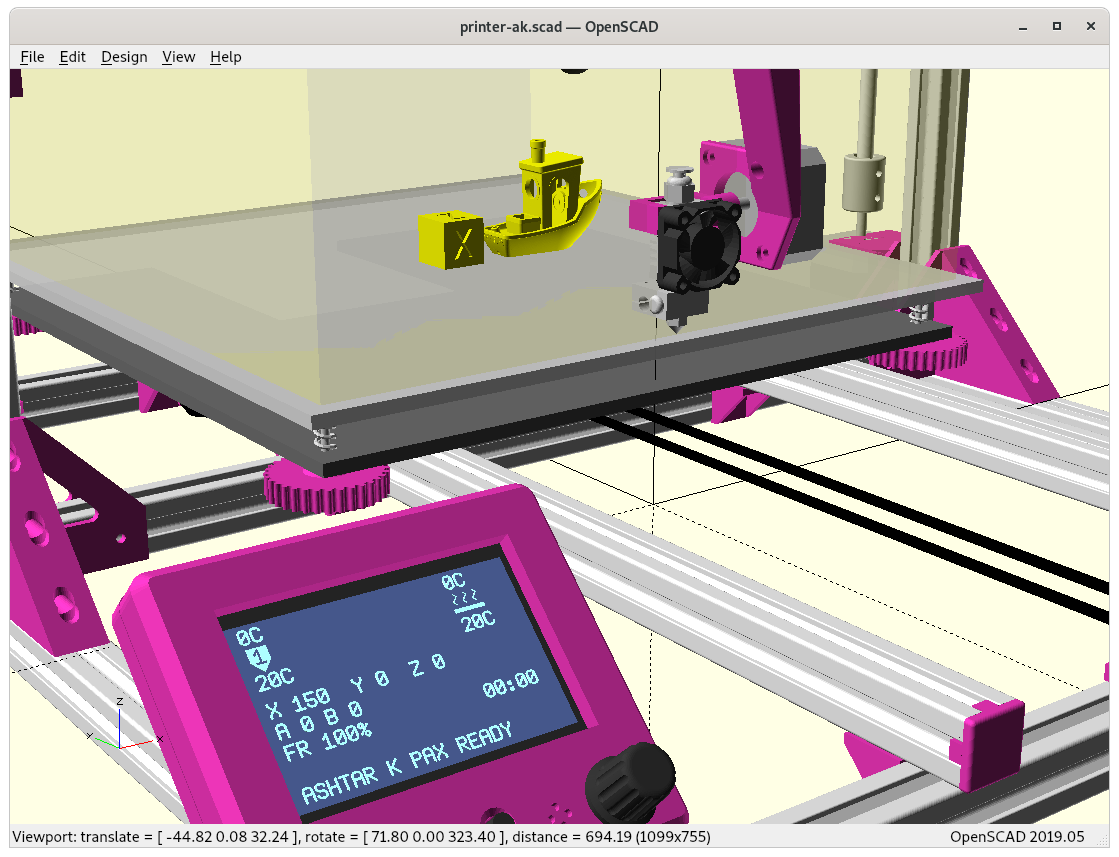
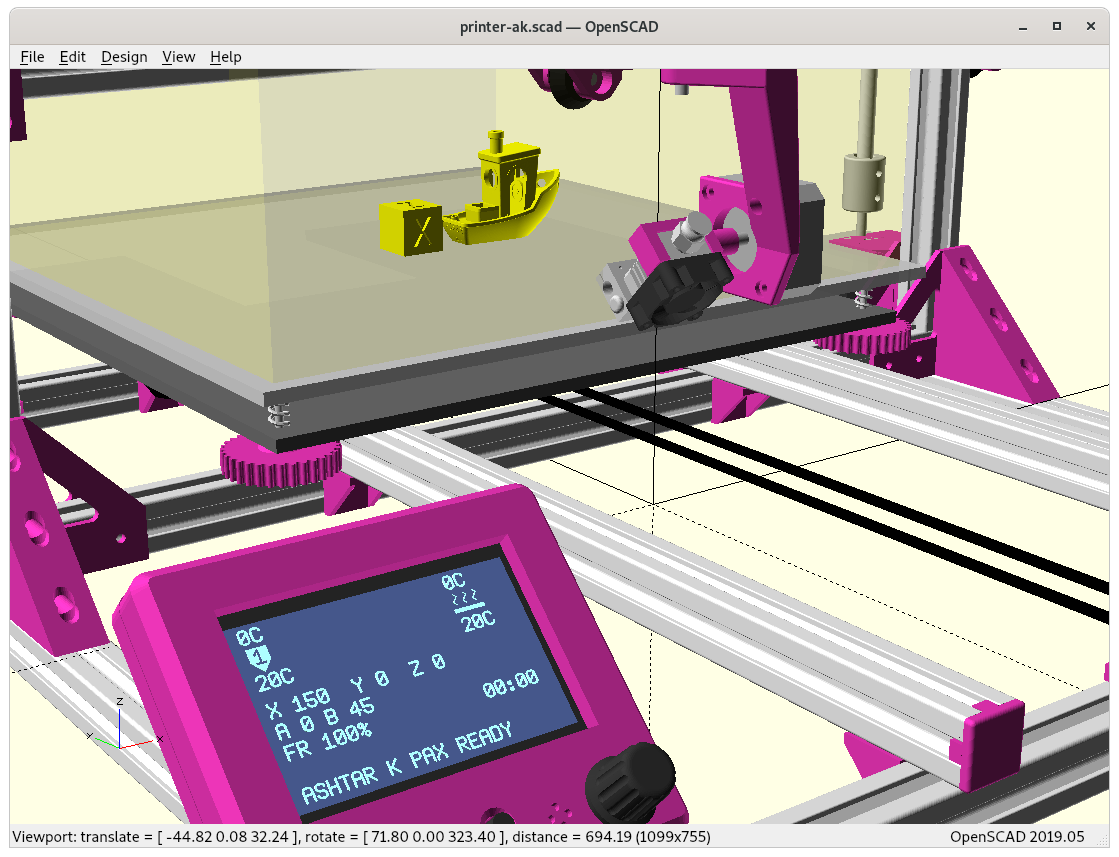
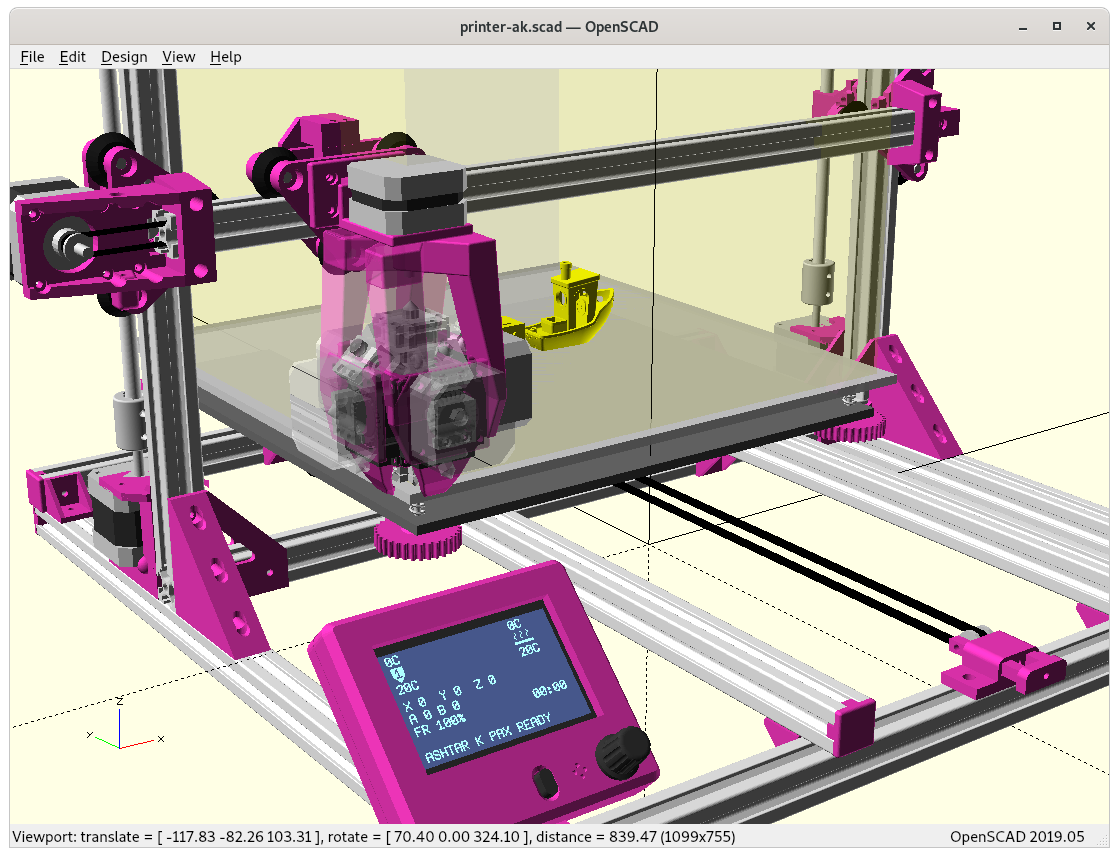
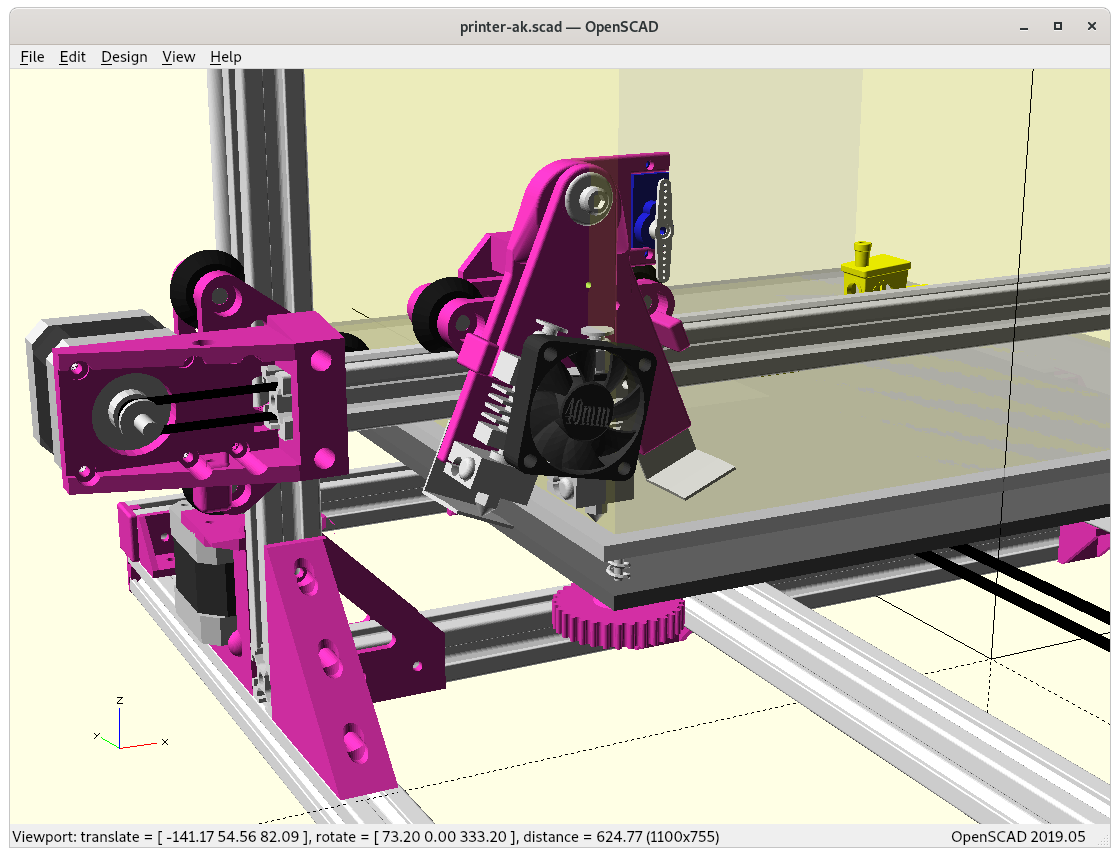
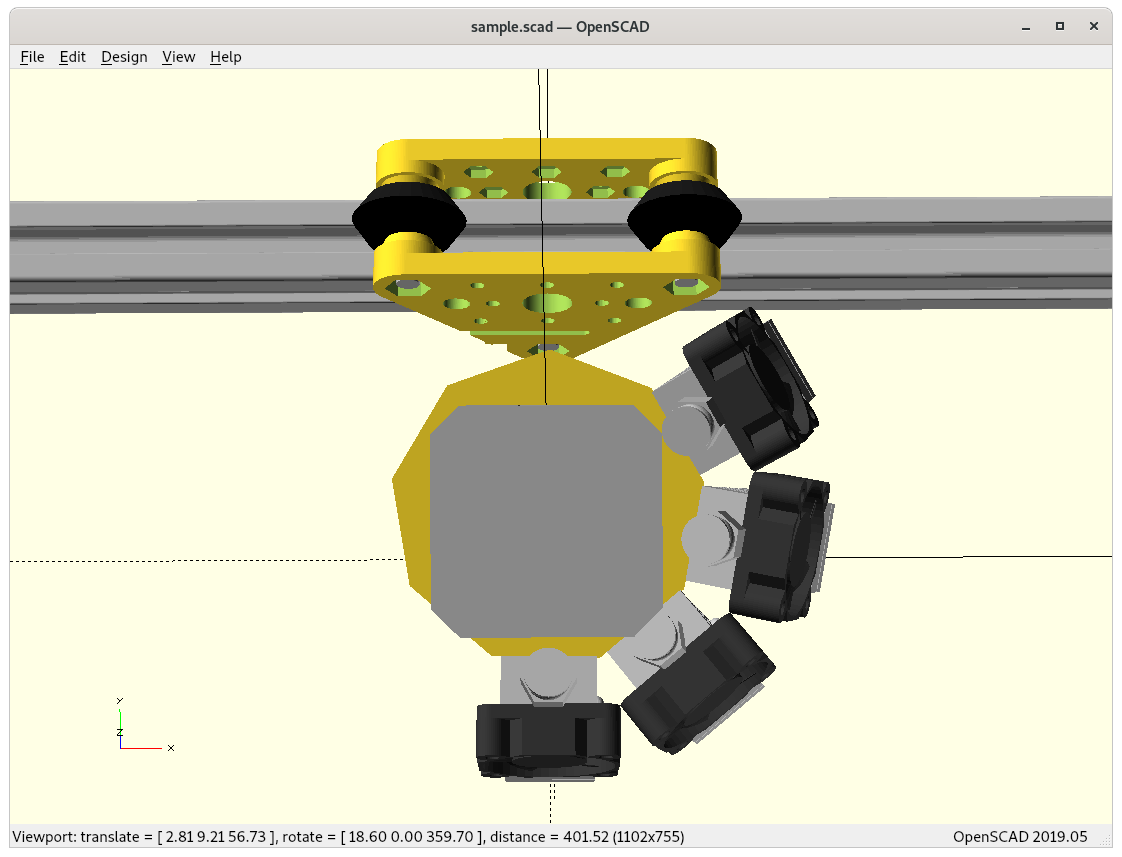
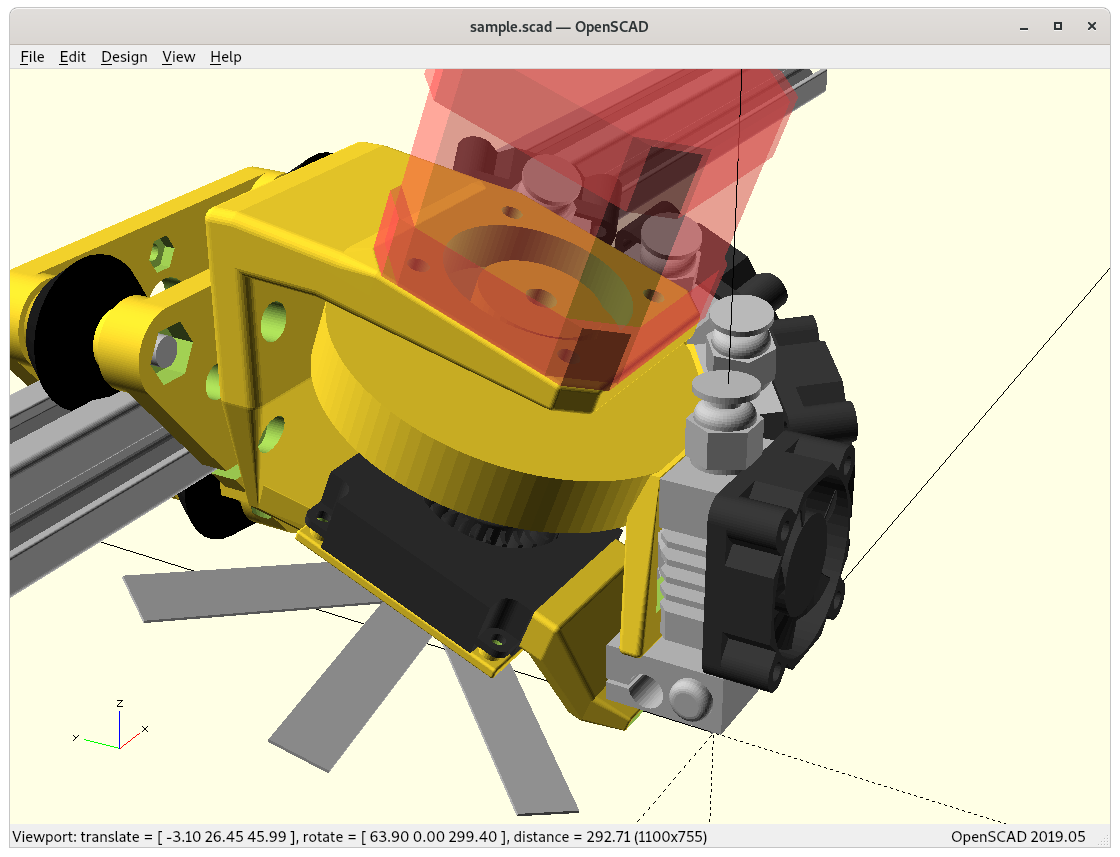
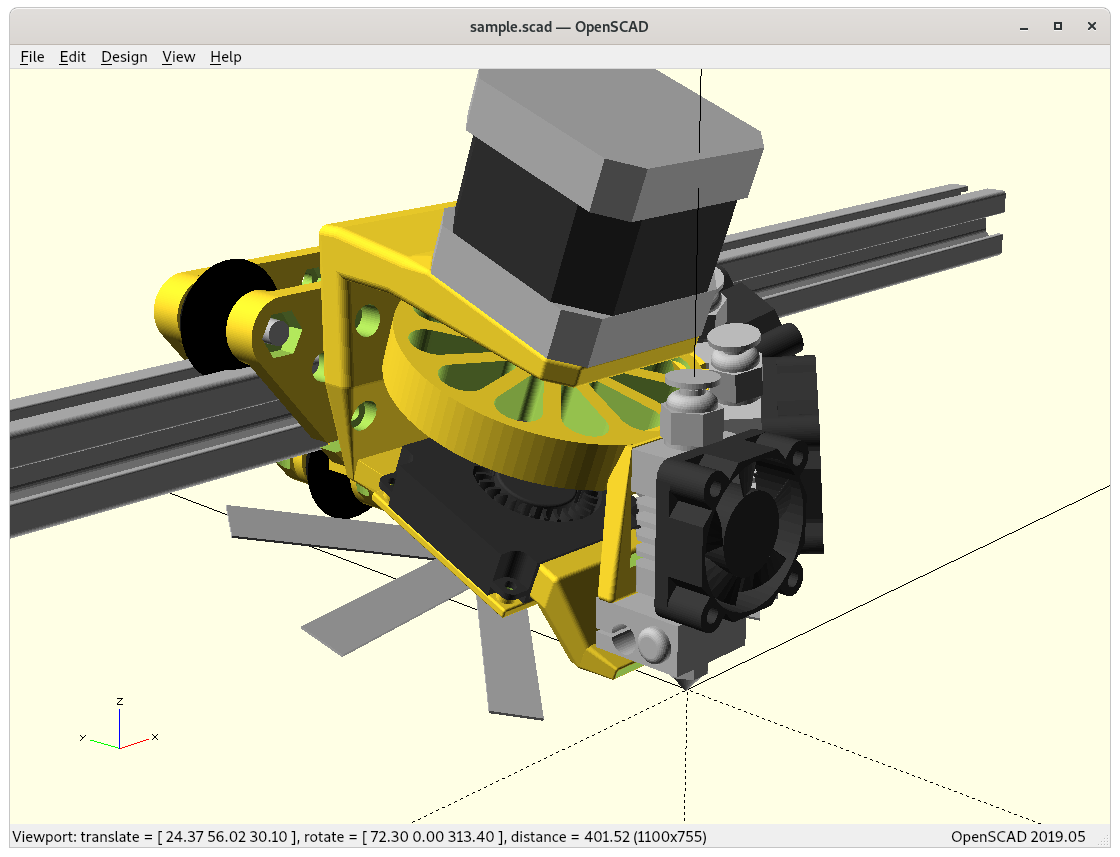
Ashtar K with 5 Axis (PAX) Printhead
Experimental mounting on Ashtar K to see how it looks, including display showing rotations of Zrot (A), Trot (B) too.
Note: the display shows original tool coordinates, whereas the firmware does tool translation aka inverse kinematics as shown in the screenshots with the display readable.
PAX printhead on Ashtar K with virtual Marlin firmware display (animated)
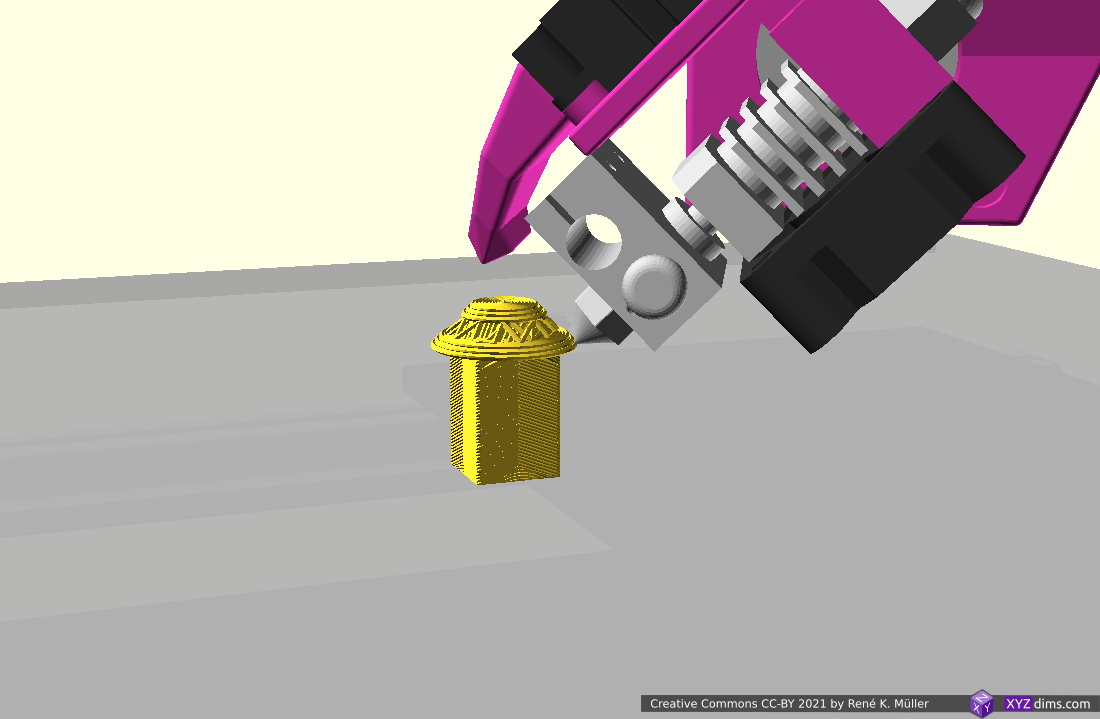
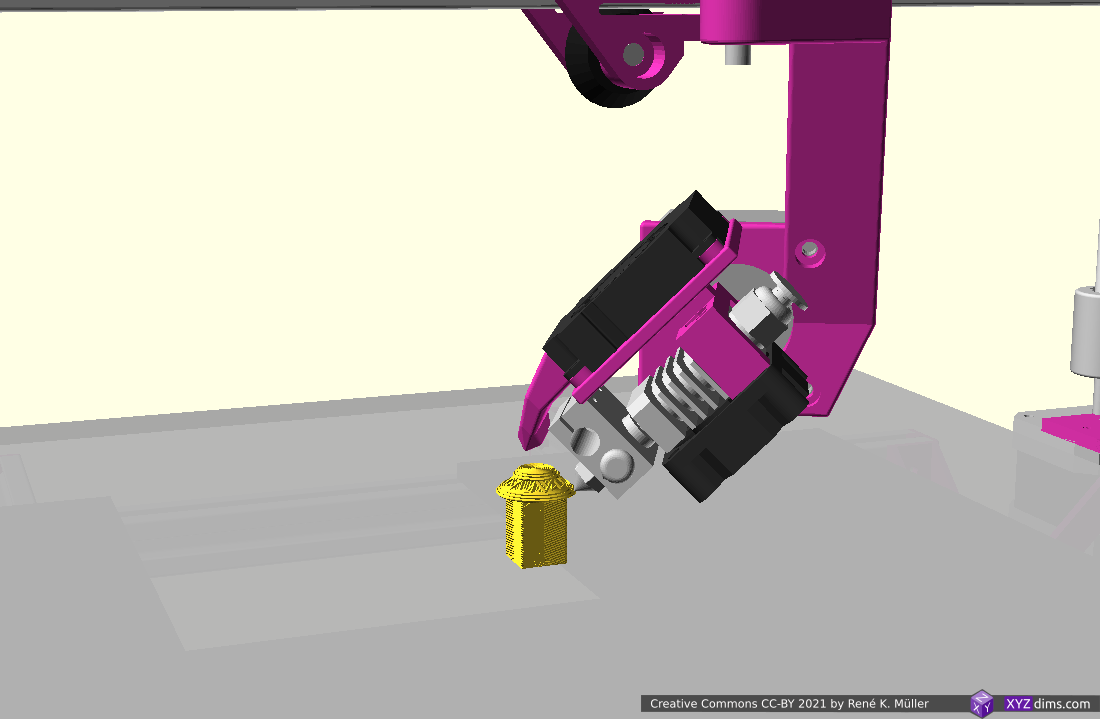
With all the freedom to angle the nozzle, all of the sudden the part cooler air nozzle shape becomes an issue, and has to become narrow as well; and overall geometry of the printhead becomes quite relevant when planning print sequences (collision detection).
Ashtar K PAX printing 4-axis/RTN sliced overhang model (animation)
PAX Tilt 180, 135 and 90
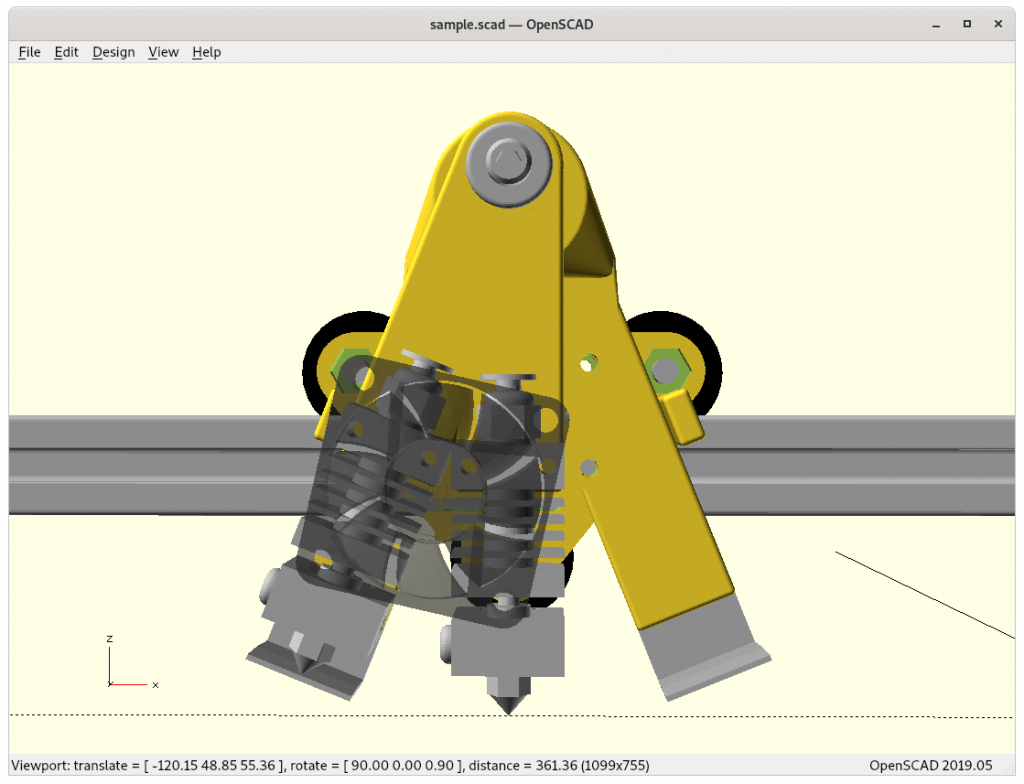
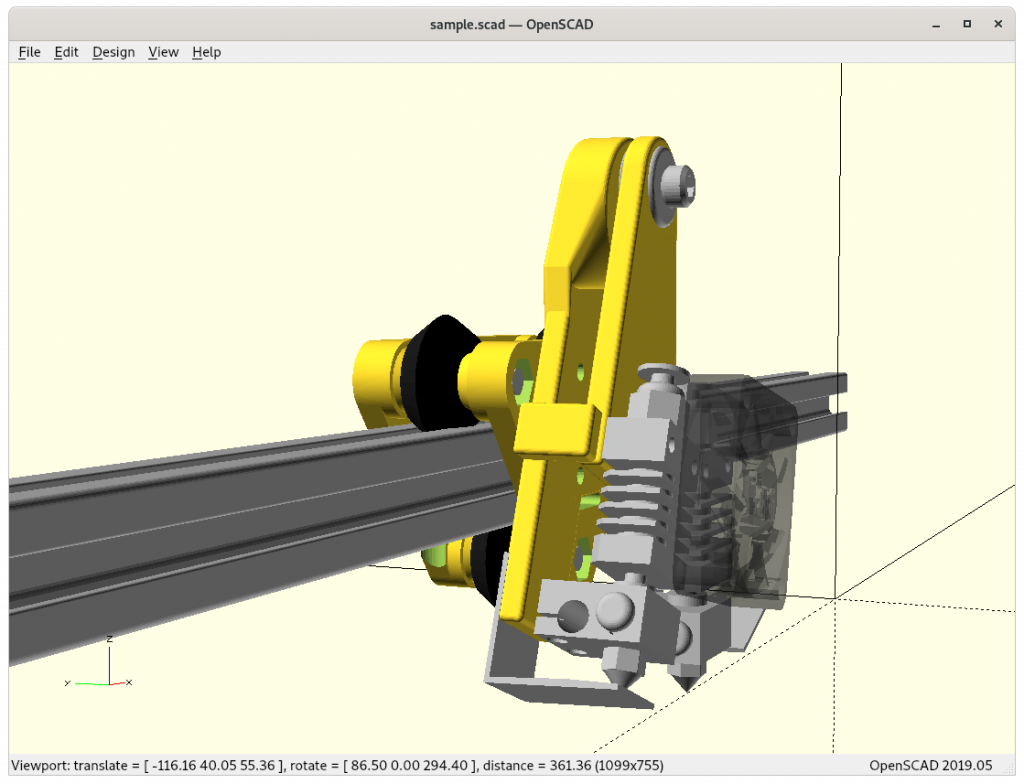
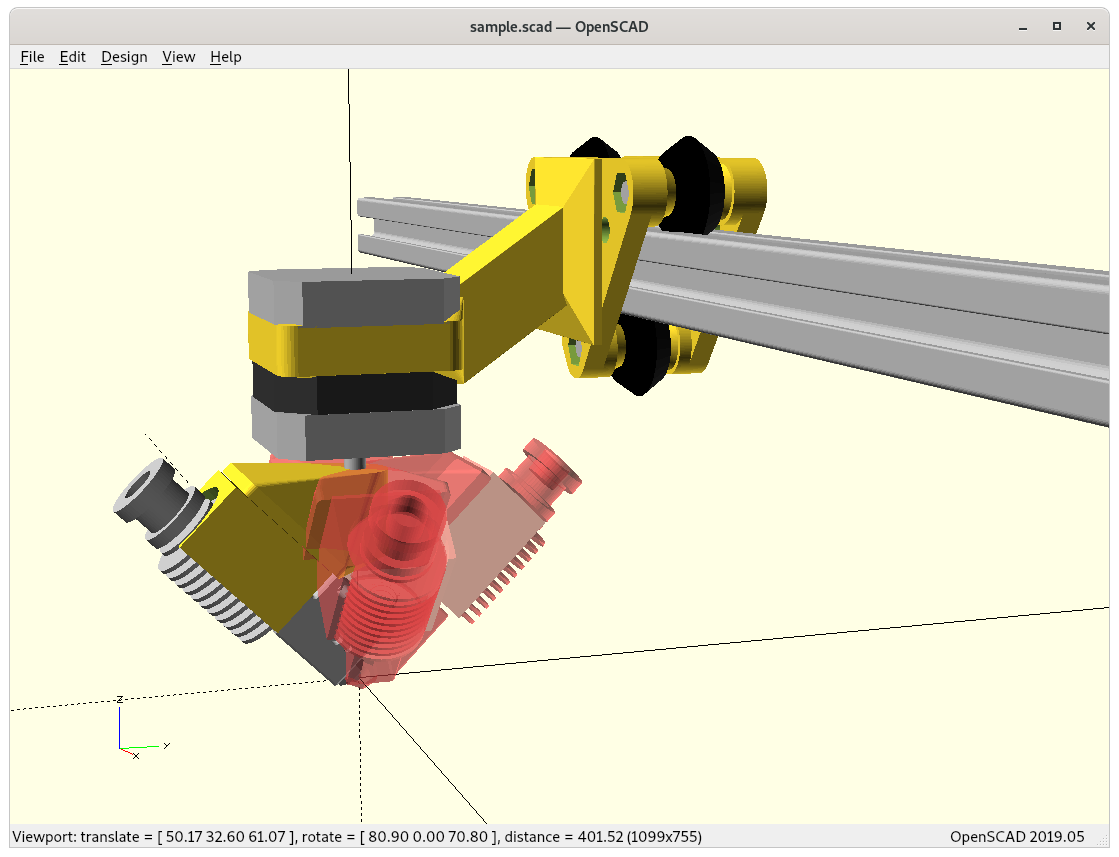
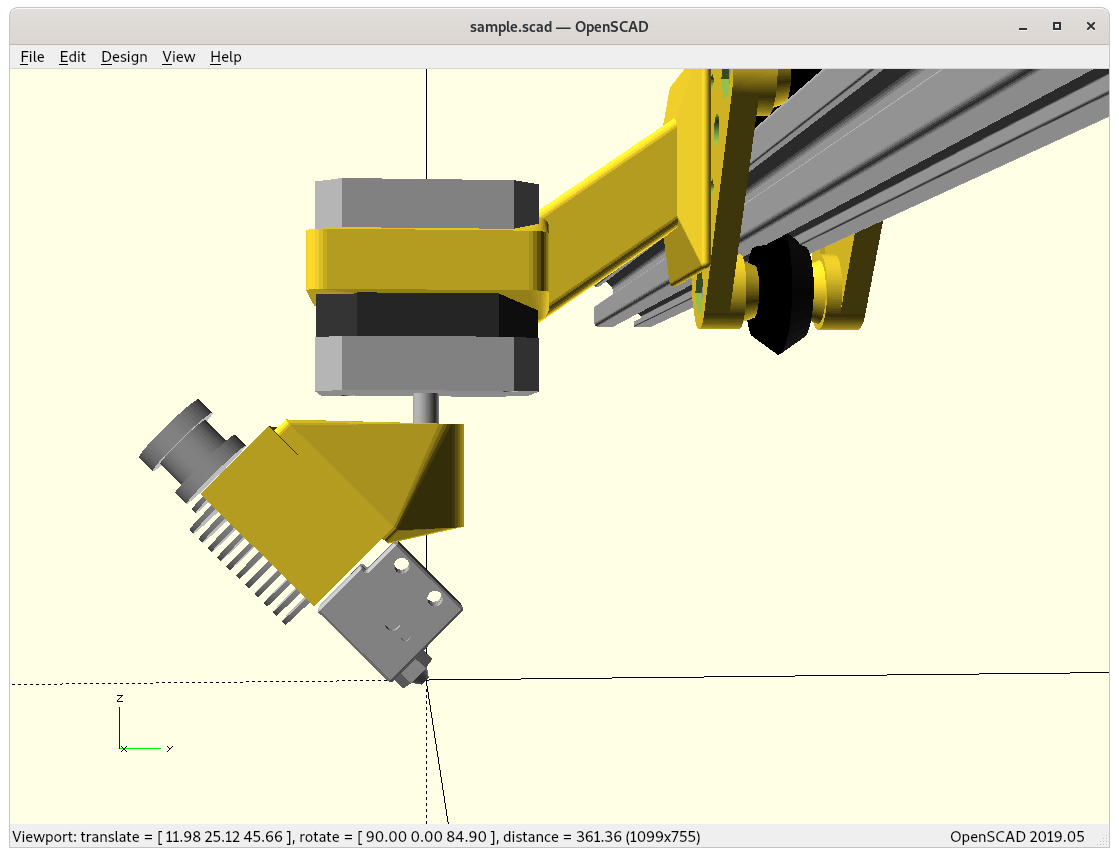
The PAX which tilts up to 180° will be referenced further as PAX or PAX 180, the 360° Z rotation is implied then too, as comparison of PAX 90 tilting to 90° only with shorter arm:
PAX 180 (Trot 0..180°)PAX 90 (Trot 0..90°)
As the slicing strategy isn’t determined, it’s not yet clear if tilt 90..180° is required or not. In case only 0..90° is sufficient, the Z rotation arm can be shortened.
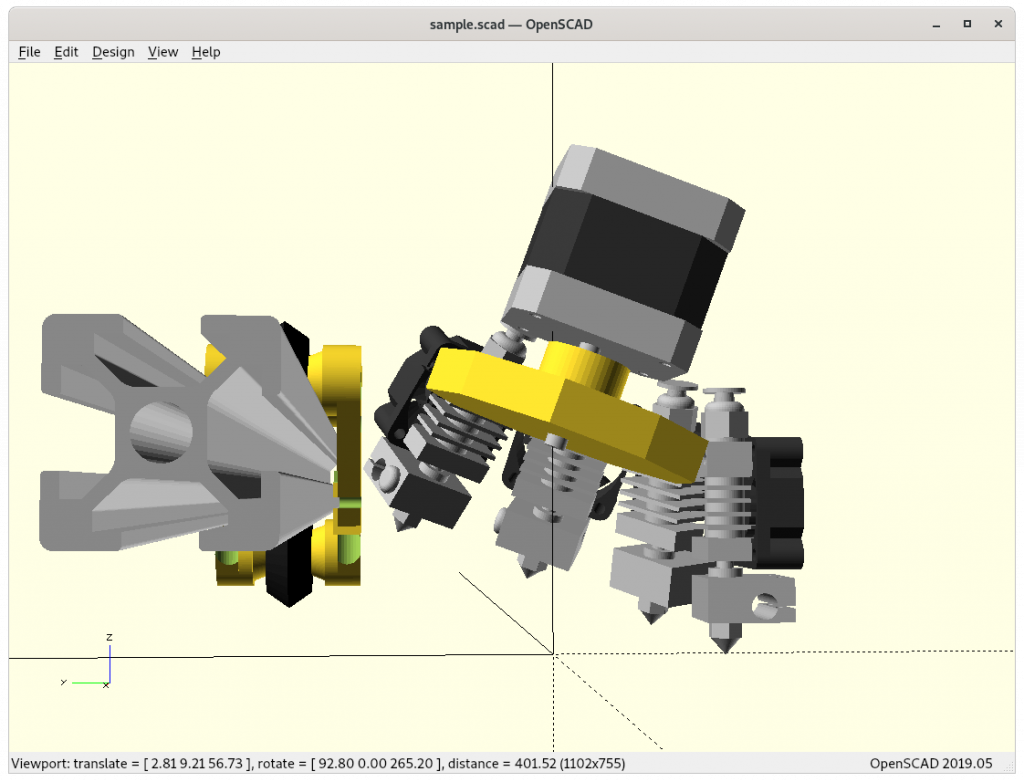
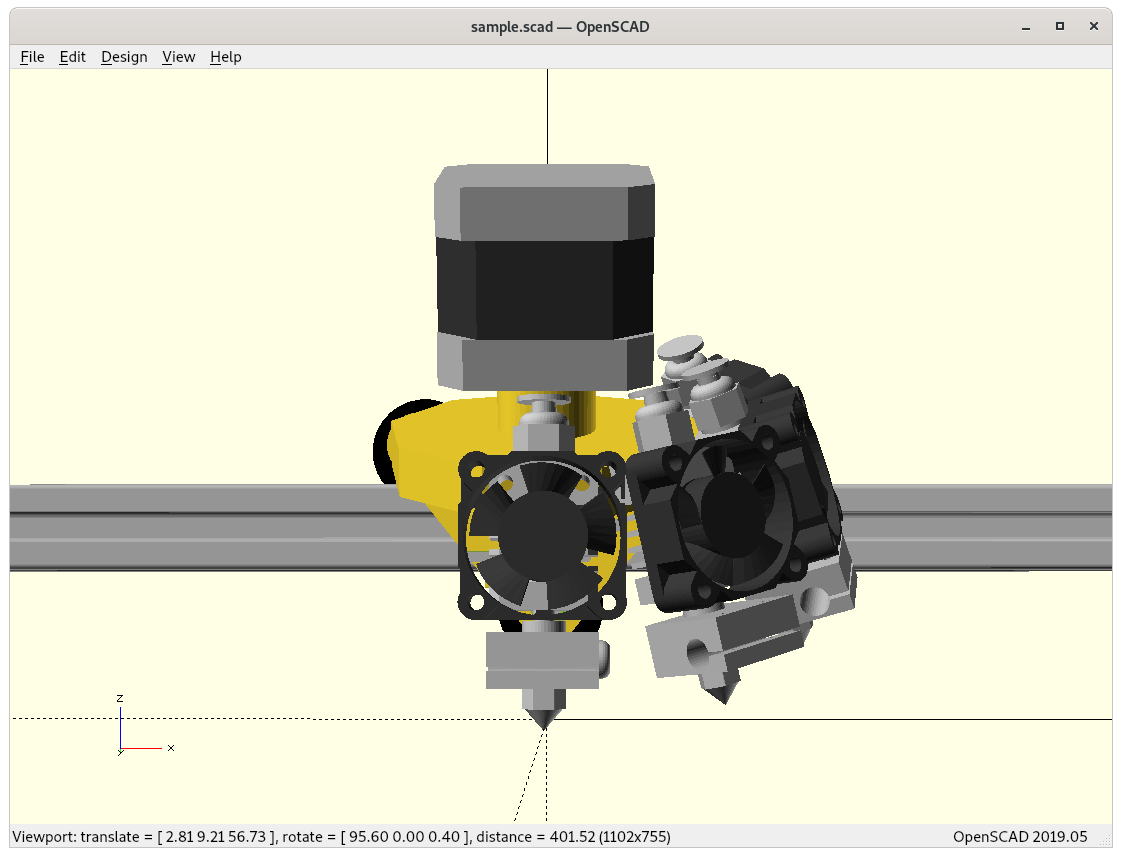
PAX 180 with NEMA17 37mmPAX 90 with NEMA17 37mmDual Hinge PAX 90 at 0° tiltDual Hinge PAX 90: sharp bent PTFE & filament at 0° tiltDual Hinge PAX 180 at 0° tiltDual Hinge PAX 180 at 0° tiltDual Hinge PAX 135Dual Hinge PAX 135 with acceptable PTFE bending
As I experimented, I realized an option in between PAX 180 and PAX 90, hence PAX 135, and seemed to compromise between angular range of the tilt and PTFE tube bending.
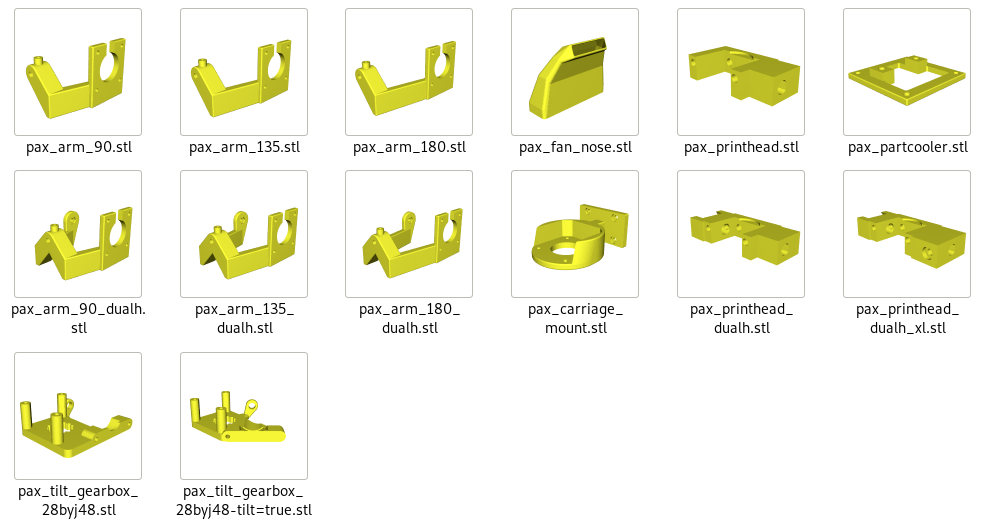
Printable Parts
Print with 0.4-0.5mm nozzle @ 0.20 – 0.25mm layer height:
pax_arm: connects motor A / Zrotation with motor B/tilt
pax_arm_90 & pax_arm_90_dualh
pax_arm_135 & pax_arm_135_dualh (recommended)
pax_arm_180 & pax_arm_180_dualh
pax_carriage_mount: holds motor A / Zrotation connects to X carriage
pax_printhead: connects motor B with printhead, @ 0.1mm layer height
pax_printhead
pax_printhead-dualh: for NEMA 17 for tilt
pax-printhead_dualh_xl: for 28BYJ-48 direct drive or tilt gearbox (worm gear)
pax_tilt_gearbox_28byj48:
pax_tilt_gearbox_28byj48: PAX 180
pax_tilt_gearbox_28byj48-tilt=true: use with PAX 90/135/190 (recommended)
pax_partcooler: connects part cooler fan with printhead
pax_fan_nose: part cooler fan nose, @ 0.1mm layer height
28byj_cooler
28byj_cooler-type=single: PAX 90/135
28byj_cooler-type=dual: PAX 90/135/180
Hardware
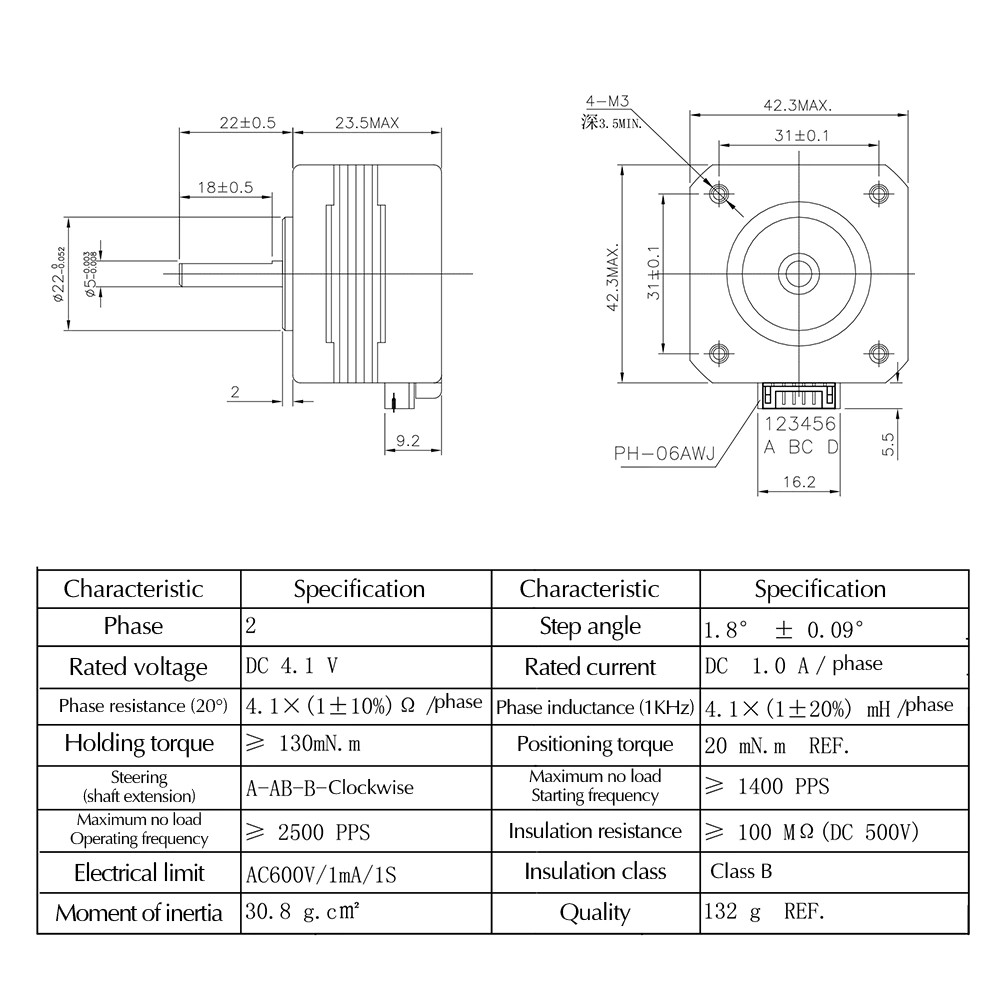
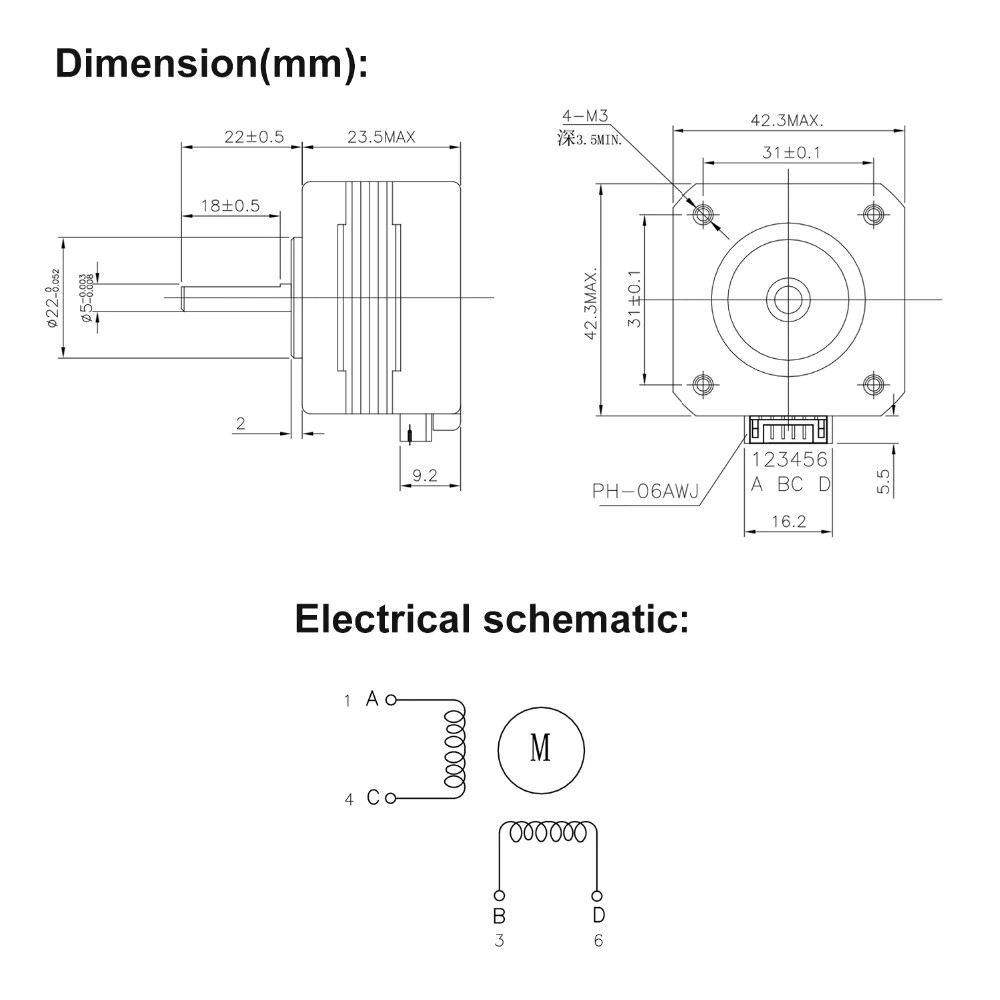
NEMA 17 23mm Datasheet (17HS4023)
For for my own reference, a few details of stepper motor for Z-rotation (“A” axis) and tilt (“B” axis):
Note: early tests have shown the NEMA 17 23mm “thin” stepper motor has too weak holding torque (without gear reduction) with the stiffness of PTFE/filament and cables for Z rotation (A) and tilt rotation (B) – so I switched back to heavy NEMA 17 40mm “long” stepper motor – but that meant the mounting pieces need to be stronger.
NEMA17 (23mm): too weak to hold position due the PTFE/filament & cablesNEMA 17 (40mm) holding torque sufficientNEMA 17 (40mm) on shorter PAX 90
If I find a low-overhead and space efficient gear reduction perhaps the NEMA 17 23mm may still have a chance to be used in this setup.
28BYJ-48 Datasheet
Note: early tests have shown for tilt rotation (B) in direct drive it’s too weak, but with worm gear setup it seems to work, though quite slow, and with just 33g weight it’s quite an advantage in this regard compared to heavy NEMA17.
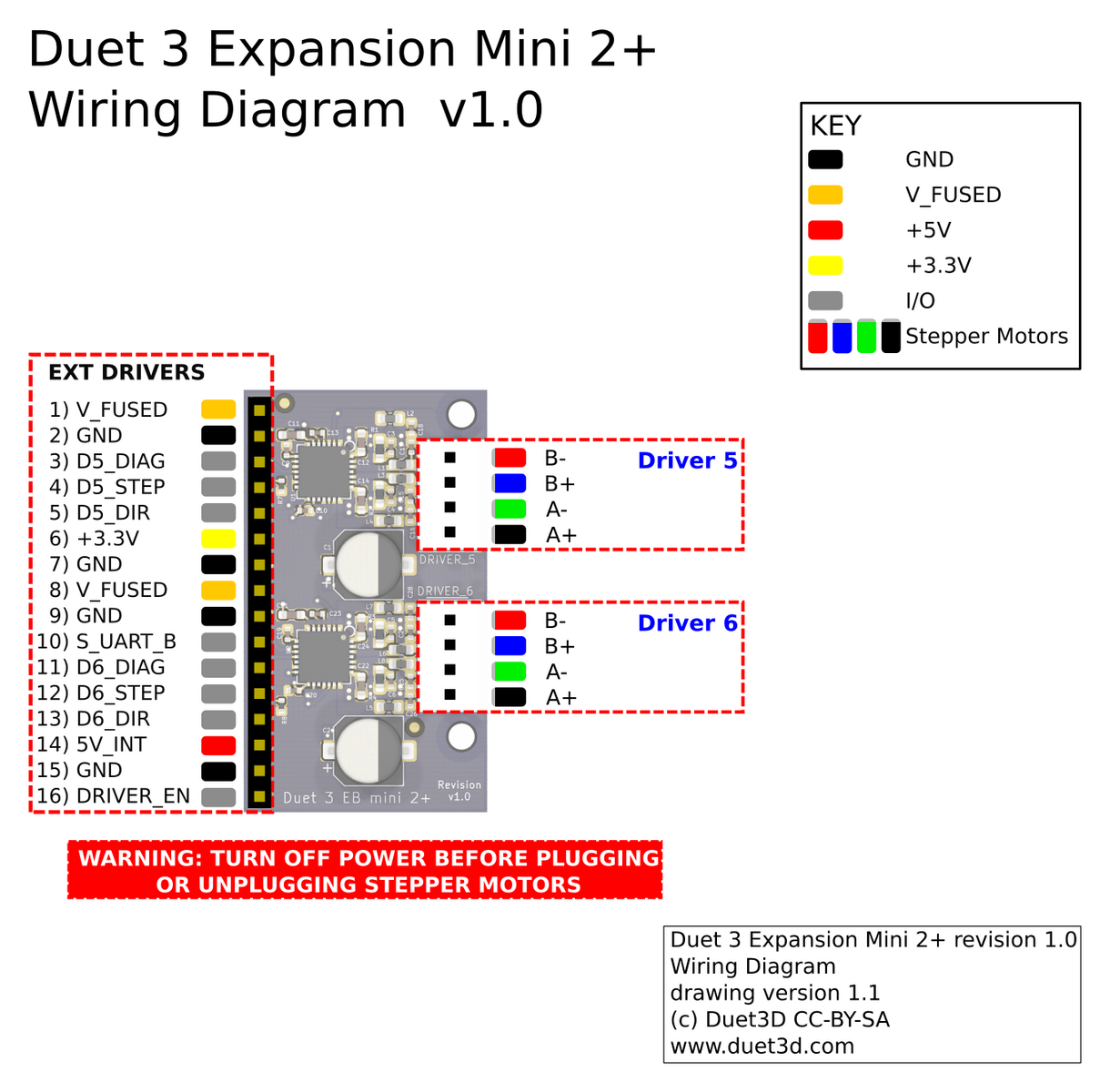
Duet 3 Mini 5+ & Mini 2 Expansion
Duet 3 Mini 5+ & Expansion Mini 2 provides 7 stepper motors drivers (TMC 2209) with microstep interpolation:
Stepper 0: X-axis
Stepper 1: Y-axis
Stepper 2/3: 2x Z-axis (I could runs 2 Steppers on on the same driver, but since I run quick Z changes, I keep it dedicated driver for each)
Stepper 4: E0
Stepper 5 (Expansion 0): A (Z rotation)
Stepper 6 (Expansion 1): B (tilt rotation)
config.g
; Default config.g template for Duet 3 Mini 5+
; Replace this with a proper configuration file (e.g from https://configtool.reprapfirmware.org)
M575 P1 B57600 S1 ; Enable UART
; test network enable
;M552 P192.168.2.14
M552 P10.0.0.100
M552 S1
M550 P"Ashtar K2 PAX" ; Name the board/machine
; config drivers -> motors: X, Y, Z(dual), E0, A & B
M584 X0 Y1 Z2:3 E4
M584 A5 B6 S1
M208 X-10 Y-10 Z0 A-185 B-40 S1 ; Set axis minima
M208 X320 Y320 Z300 A185 B100 S0 ; Set axis maxima
M92 X100 Y100 Z3200 E95 ; Set axis steps/mm
M92 A9 B9 ; Set axis steps/degrees
M350 X16 Y16 Z16 E16 I1 ; Set 16x microstepping with interpolation
M350 A4 B4 I1 ; Set 4/8/16x microstepping with(out) interpolation
M906 X800 Y1000 Z800 E800 A1000 B1000 ; Set motor currents (mA)
M201 X400 Y400 Z15 E1000 ; Accelerations (mm/s^2)
M201 A800 B800
M203 X10000 Y10000 Z360 E3600 ; Maximum speeds (mm/min)
M203 A20000 B20000 ; Maximum speed (mm/min)
M566 X600 Y600 Z30 E20 ; Maximum jerk speeds (mm/min)
M566 A300 B300
; Define end-stops:
M574 X1 S1 P"io0.in"
M574 Y1 S1 P"io1.in"
M574 Z1 S1 P"io2.in"
;M574 A1 S1 P"io3.in"
;M574 B1 S1 P"io4.in"
M564 H0 ; Allow (all) axis without homing (required for A/B)
M918 P1 ; Set 12864 display (doesn't work yet)
M569 P0 S1 ; Set motor drive P0 (X)
M569 P1 S1 ; Set motor drive P1 (Y)
M569 P2 S1 ; Set motor drive P2 (Z1)
M569 P3 S1 ; Set motor drive P3 (Z2)
M569 P4 S0 ; Set motor drive P4 (E0)
M569 P5 S0 ; Set motor drive P5 (A/Zrot)
M569 P6 S0 ; Set motor drive P6 (B/tilt)
M563 P0 D0 H1 F0 ; Define tool 0
G10 P0 X0 Y0 Z0 ; Set tool 0 axis offsets
G10 P0 R0 S0 ; Set initial tool 0 active and standby temperatures to 0C
; M572 D0 S0.06 ; Set pressure Advance
; Bed Heater
; M308 S0 P"temp0" Y"thermistor" B4725 C7.060000e-8 ; configure sensor 0 as thermistor on pin temp0
; M950 H0 C"out0" Q25 T0 ; create bed heater output on out0 and map it to sensor 0, PWM frequency: 25Hz
; M307 H0 R0.262 C338.0 D10.52 S1.00 V11.8 B0 ; Bed tuning values, enable PID
; M140 H0 ; Bed uses Heater 0
; M143 H0 S120 ; Set temperature limit for heater 0 to 120C Bed
; Hotend heater
M308 S1 P"temp1" Y"thermistor" T100000 B4725 C7.060000e-8 ; configure sensor 1 as thermistor on pin temp1
M950 H1 C"out1" T1 ; create nozzle heater output on out1 and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S295 ; set temperature limit for heater 1 to 295C
M302 S170 R170 ; allow extrusion starting from 170°C and retractions already from 170°C
; Part cooling fan
M950 F0 C"out3" Q100 ; Create fan 0 part cooler on pin out3 and set its frequency
M106 P0 S0 H-1 ; Set fan 0 value. Thermostatic control is turned off
; Heatsink cooling fan
M950 F1 C"out4" Q1000 ; Create fan 1 heatsink fan an pin out4 and set its frequency
M106 P1 T45 S255 H1 ; Set fan 1 value. Thermostatic control is turned on > 45C turn on
;M106 P1 S255 H-1
M302 P1 ; Allow cold extrusion (for testing)
T0 ; Set tool 0 (default extruder)
G21 ; Work in millimetres
G90 ; Send absolute coordinates...
; pre 3.3 (3.2.x)
G92 A-1 B-1 ; Make Zrot & Tilt active
G1 A0 B0
; 3.3 or later
;M17 A B
G92 A0 B0
G1 A0 B0 F20000
Endstops:
X: io_0 (Pin 2/3)
Y: io_1 (Pin 2/3)
Z: io_2 (Pin 2/3)
[optional] A: io_3 (Pin 2/3)
[optional] B: io_4 (Pin 2/3)
Thermistors:
temp0: bed
temp1: hotend
Heating:
out0: bed (max 15A)
out1: hotend (max 5A, 60W@12V)
Fans:
out3: part cooling fan (Pin 2/4)
out4: heatsink fan (Pin 2/4) or 12V: heatsink fan (always on)
So far Duet 3 Mini 5+ with RepRap Firmware V3.2 works well with the first motion tests. It took me an afternoon to configure the board without the web configurator but direct editing config.g on the web-console and reading documentation for each individual G-code configuration as part of getting to know the Duet 3D approach using G-code to configure the entire firmware (except the inverse kinematic).
The inverse kinematic with adjustable offsets comes next.
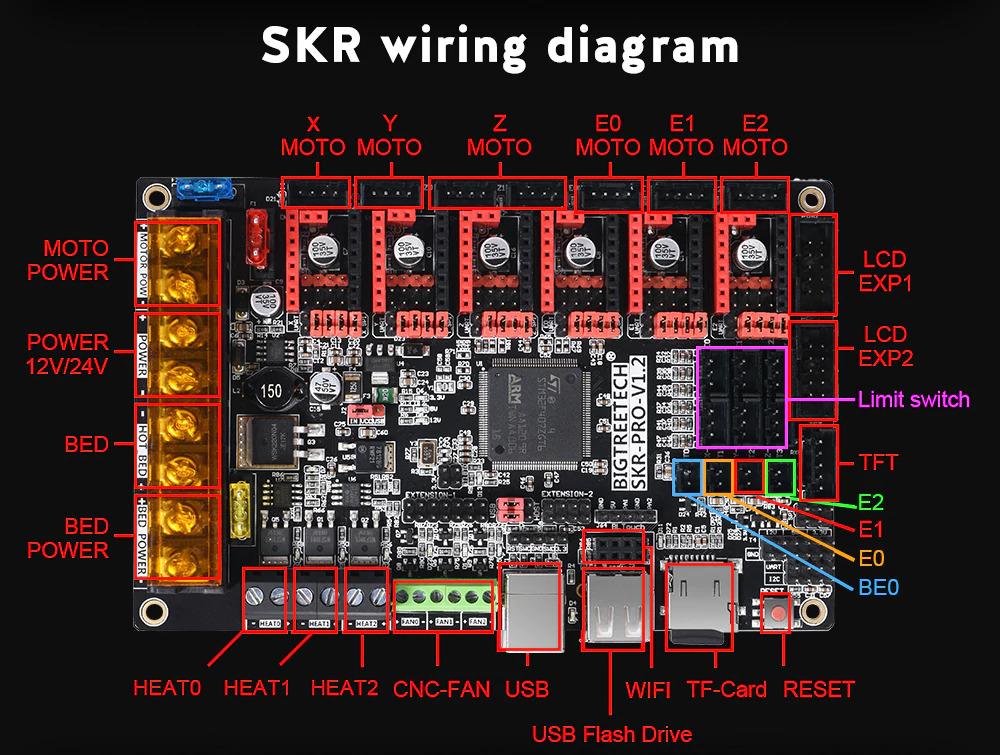
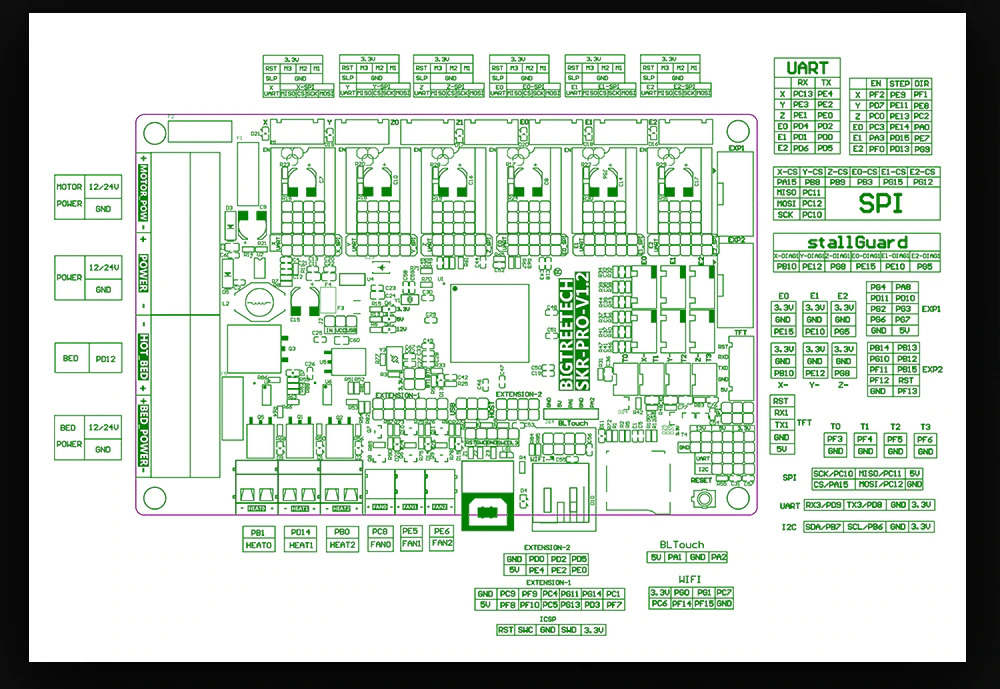
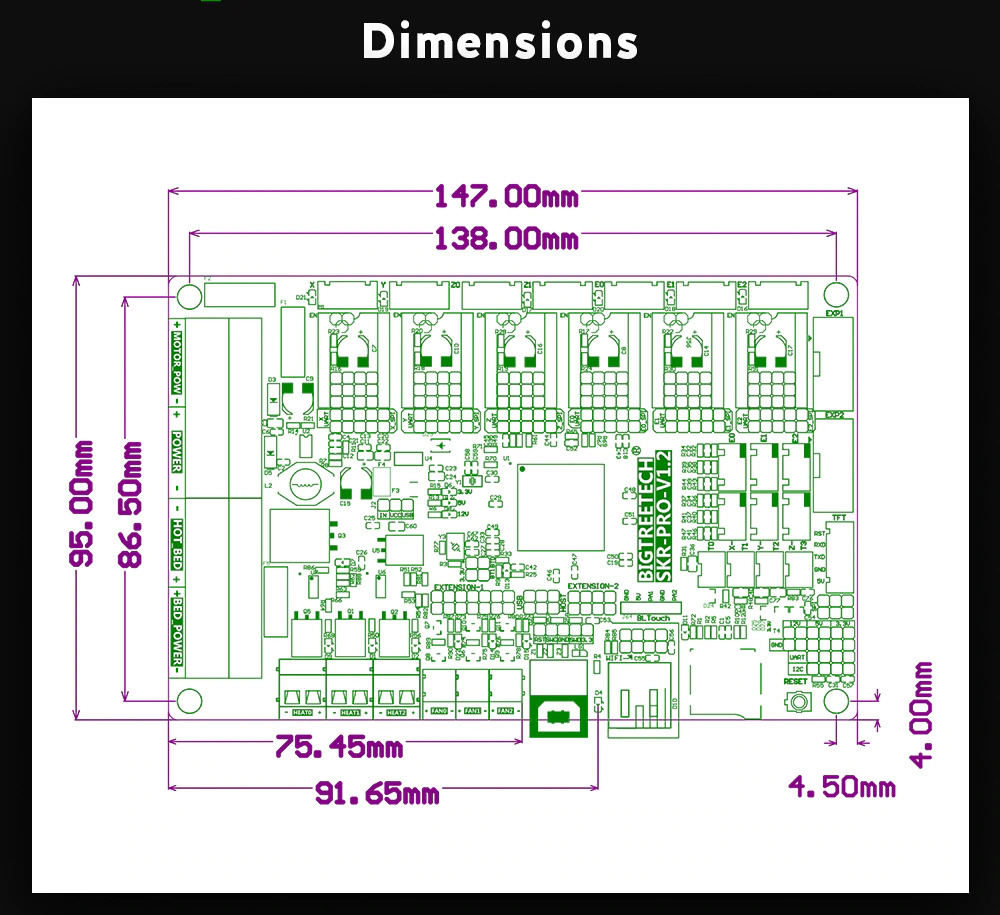
SKR Pro 1.2
Alternatively the SKR Pro V1.2 also can run Duet 3D RepRap Firmware V3.x
SKR Pro 1.2 provides 6 stepper motors drivers, whereas Z stepper driver provide dual connectors:
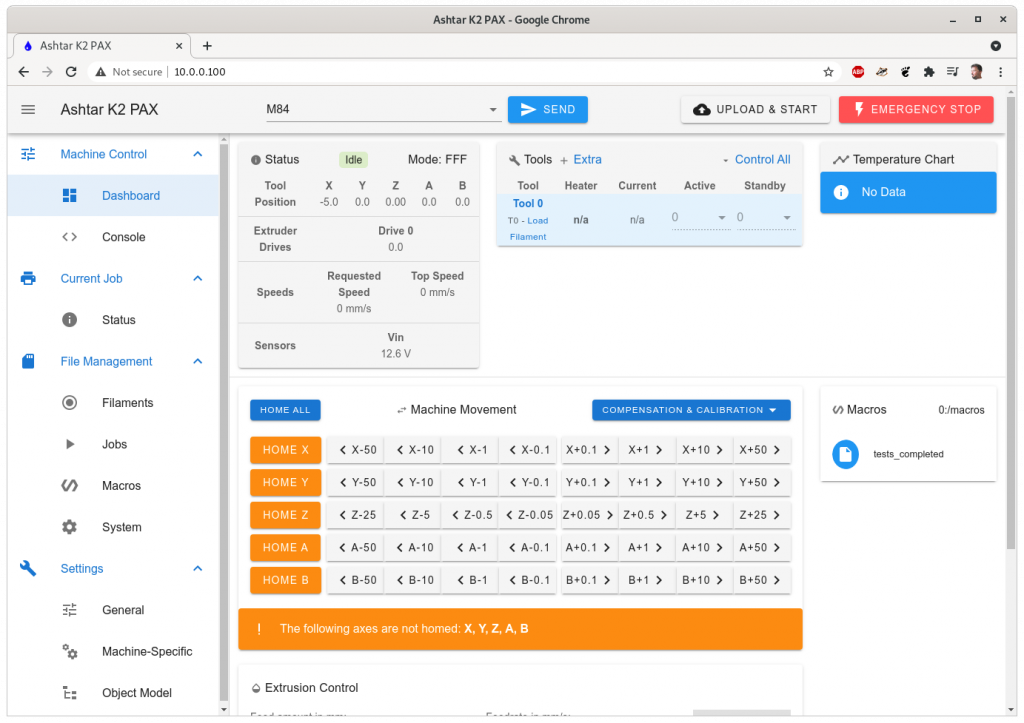
Duet 3 Mini 5+ with Expansion Mini 2 with 2x NEMA 17 (40mm) without gear reduction:
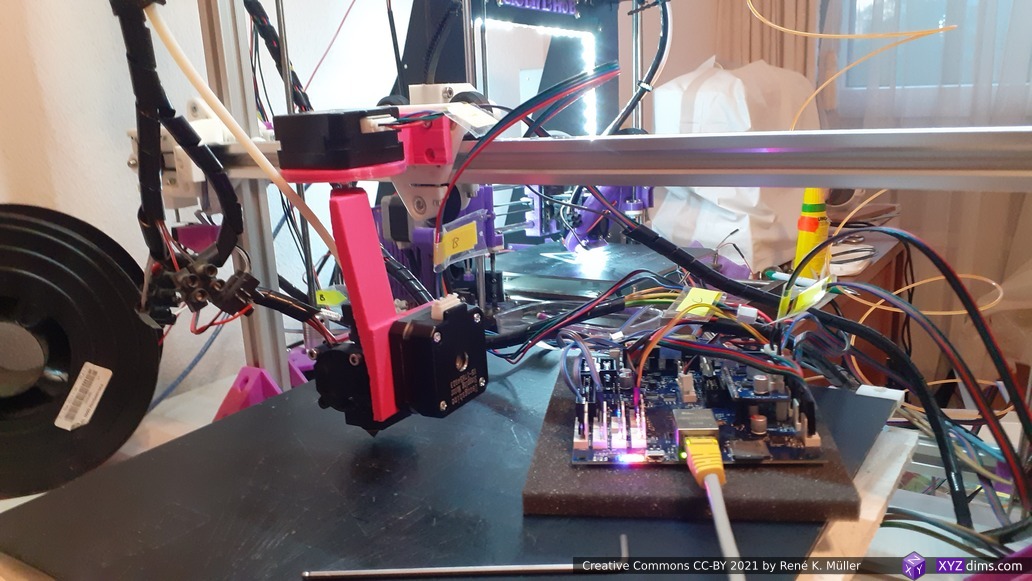
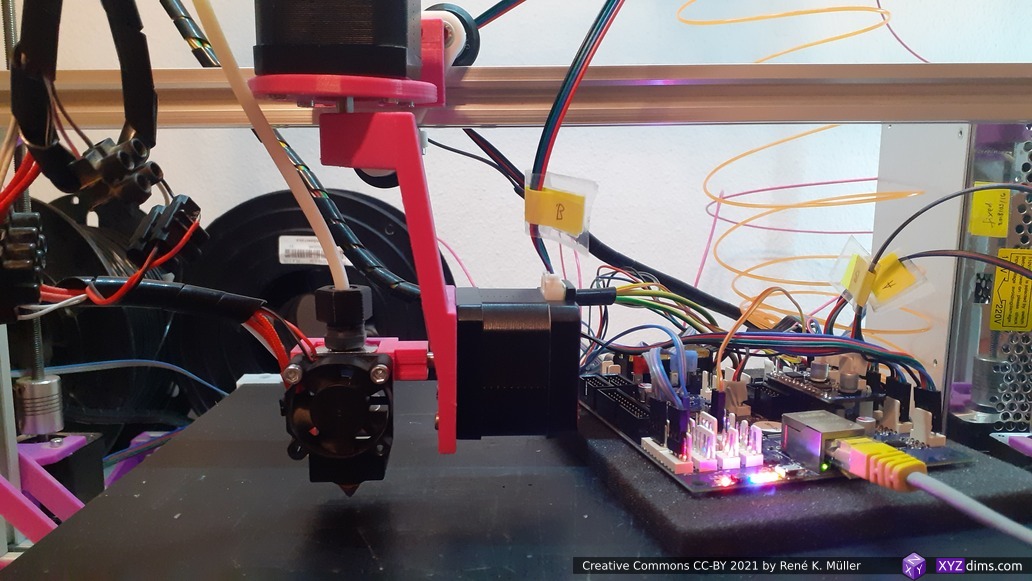
Duet Web Console (DWC) for Ashtar K2 with PAX printheadTest Setup of PAX printhead mounted on Ashtar K (#2) with Duet 3 Mini 5+ (Ethernet)
and first movement with NEMA 17 (40mm) with enhanced carriage mount, manually entered G1 A B motions, a shorter yet stiffer PAX 90 arm (means tilt only 0..90): A=-180..180 and B=0..90:
Closer look:
And alternatively 24-BYJ-48 stepper motor direct drive or with worm gear, with a dual hinge arm:
PAX 90 (Dual Hinge): Z rotation with NEMA17, tilt rotation with 28BYJ-48 stepper motor (with modification)PAX 180 (Dual Hinge): Z rotation with NEMA17, tilt rotation with 28BYJ-48 stepper motor (with modification) using worm gearPAX 135 (Dual Hinge): Z rotation with NEMA17, tilt rotation with 28BYJ-48 stepper
RepRapFirmware (RRF) vs Marlin 2.x
Duet 3D RepRapFirnware (RRF) natively supports multiple axis, and since RRF V3.2 also treats axis A-D as rotational axis by default. So far Marlin 2.x does not support multiple axis yet, but there is a fork / PR available (reviewed 2021/05/14) which introduces the functionality and be available soon.
RRF Inverse Kinematics (PAXKinematics)
The key element of course is the dedicated inverse kinematics, which I implemented and finally works rudimentary within RRF (2021/07/14), still some small things to take care:
The nozzle tip stays in place, but Zrot and tiltrot is changed; this allows machine independent G-code to be processed.
References
5 Axis
Pentarod, 5 axis RepRap, 2 axis added to bed (not head), master thesis (see also paper), most useful
Status: early draft with rotary Z 4 printheads and rotary Y 2 printheads
4 printheads on rotary Z MSE, tool 0 selected
4 printheads on rotary Z MSE, tool 0 selected (top view)
2 printheads in rotary Y MSE, tool 0 selected
2 printheads in rotary Y MSE, tool 0 selected (top view)
MSE Y2 Mockup, testing motion & precision
Updates:
2021/08/01: MSE Z4 printed & mounted
2021/02/09: matured Rotary Y MSE dual with a servo
2021/01/31: added more drafts and formulated Pros and Cons for Rotary Z MSE, post published, with part cooler
2021/01/29: starting with collecting existing solutions and consider my options, Rotary Y (max 2 printheads) and Rotary Z (max. 4 printheads) design started
Introduction
Since I dedicated some time for the IDEX upgrade on all the 4 Ashtar Series: K, C, M and D, I realized one of the main advantages of IDEX is to have the non-active printhead aside and not moving over existing prints and certainly not oozing over it.
There is another way to achieve such, by having multiple printheads mounted on the X carriage and mechanically switch them so only one nozzle actually touches the Z plane to print, all other printheads aside and sealing their nozzle with anti-oozing measure like an underlying metal sheet.
As I like to have my own solution in OpenSCAD source, so let’s dive into the design process:
Multiple Switching Extrusions (MSE)
Design Goals
2, 3 perhaps 4 heads switching, only one printhead/nozzle at Z printing head
share one heatsink fan
share one part cooler setup and fan
simple adjustable calibration of X, Y, Z repeatability
ideally interchangable between
E3D V6: proven reliability
Micro Swiss / CR 10 clone: single screw to set Z distance
inactive printheads non-ooze with shield
keep it simple, don’t overengineer, keep construction simple and light
Drafts
Rotary Y-Wise
Rotating around the Y axis, suitable for 2 printheads only, as 3 or more printheads use up too much in X space:
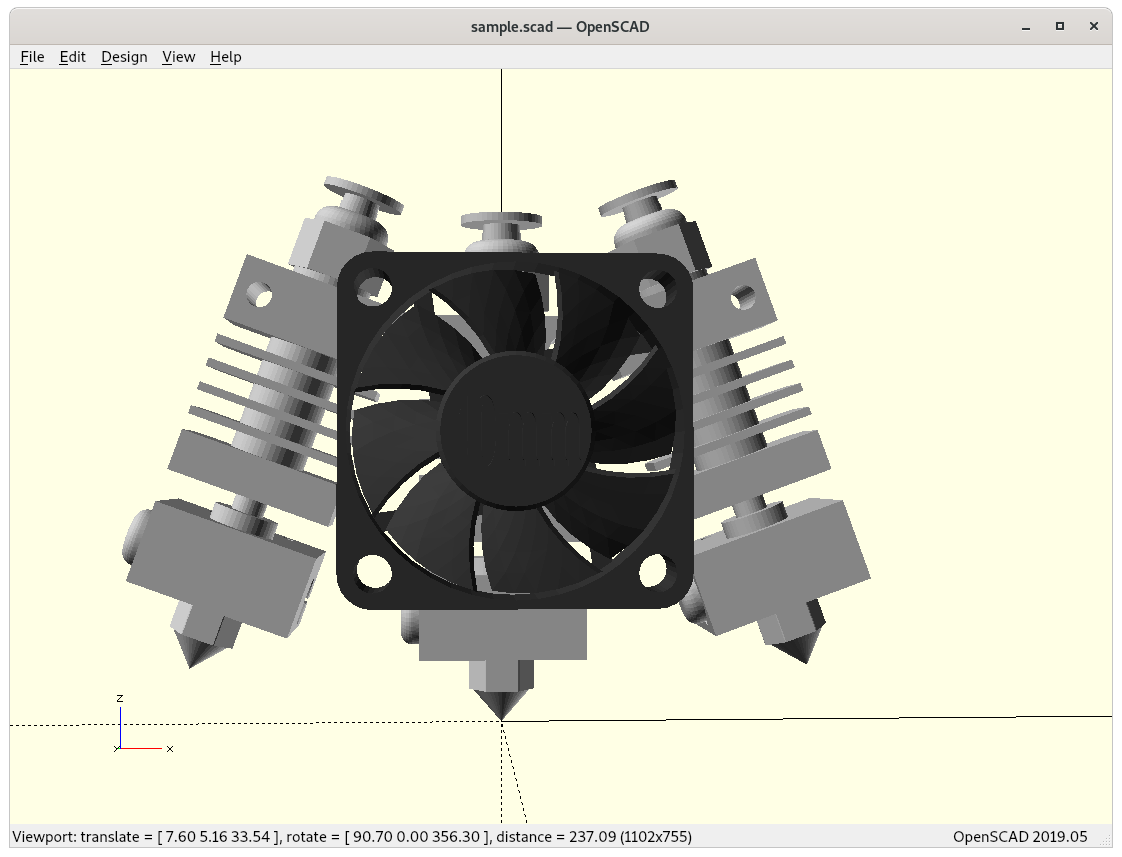
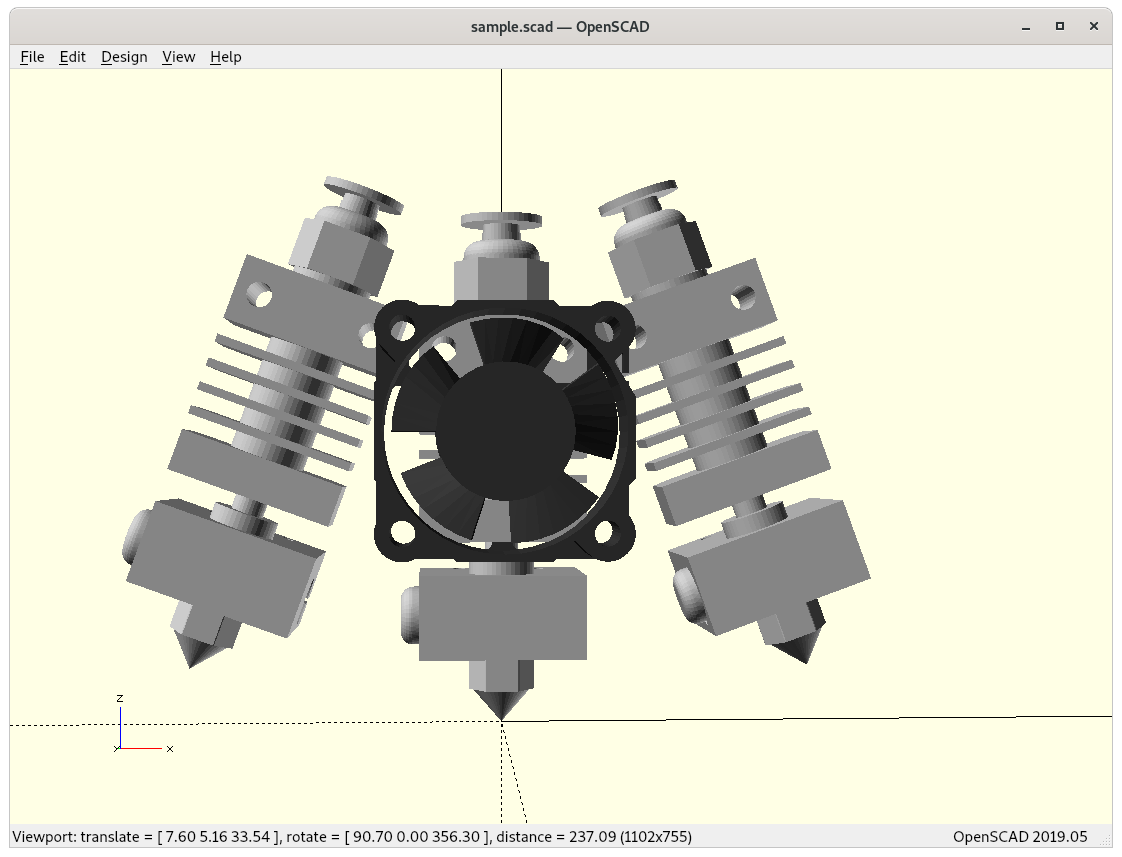
40mm fan
30mm fan
30mm fan each
132mm distance, 20°
2 printheads using SG90 servo, 132mm/20°, tool 0
2 printheads using SG90 servo, 132mm/20°, tool 1
3 printheads, 100mm distance, 30°
2 printheads using SG90 servo
2 printheads, 100mm/30°, tool 0
2 printheads, 100mm/30°, tool 1
Simple design, shared fan is difficult, as I like to go with Micro Swiss as it’s very compact, I likely end up with dedicated heatsink fans as all printheads in use will be heating and the heatsinks require fanned air. The ooze-shields are easy to attach.
132mm / 20 degrees
120mm / 24 degrees
110mm / 27 degrees
100mm / 35 degrees
132mm / 20°: tall (not good), narrow X space (good)
120mm / 24°: still ok
110mm / 27°: extending X space usage
100mm / 35°: low but extending too much in X
So let’s combine most narrow with a common fan approach, for a compact dual switching printhead/extrusion sacrificing as little X space as possible:
using SG90 servo to switch extruders (only for dual extruder setup), tool 0
using SG90 servo to switch extruders (only for dual extruder setup), tool 1
including part cooler in front
The actual axis of rotation can be moved lower by becoming an arc or swing, which will make the construction more complex, but likely more reliable as the servo cannot be trusted to keep position exact enough – so a spring to keep the swing in either two position, or constant force to push to a left or right limit in dual extrusion setup – for now I use a small SG90 servo to push toward the mechanical stoppers, either left or right hence only usable in dual setup, and using a 1mm wire to connect the swing with the servo.
increased distance of base to anchor, to support silicon sock on hotend
single bearing on anchor
dual bearings on base & anchor
Rotary Y 3 using too much space
The Rotary Y approach definitely is only suitable for dual extrusion setup, as anything else, as seen on this comparison, uses up too much X space for my consideration.
Addendum: DerM4209 did a design with 6 extruders on full 360° rotary, and as the setup shows, he has plenty X-axis space to dedicate to such.
Let’s explore another idea . . .
Rotary Z-Wise
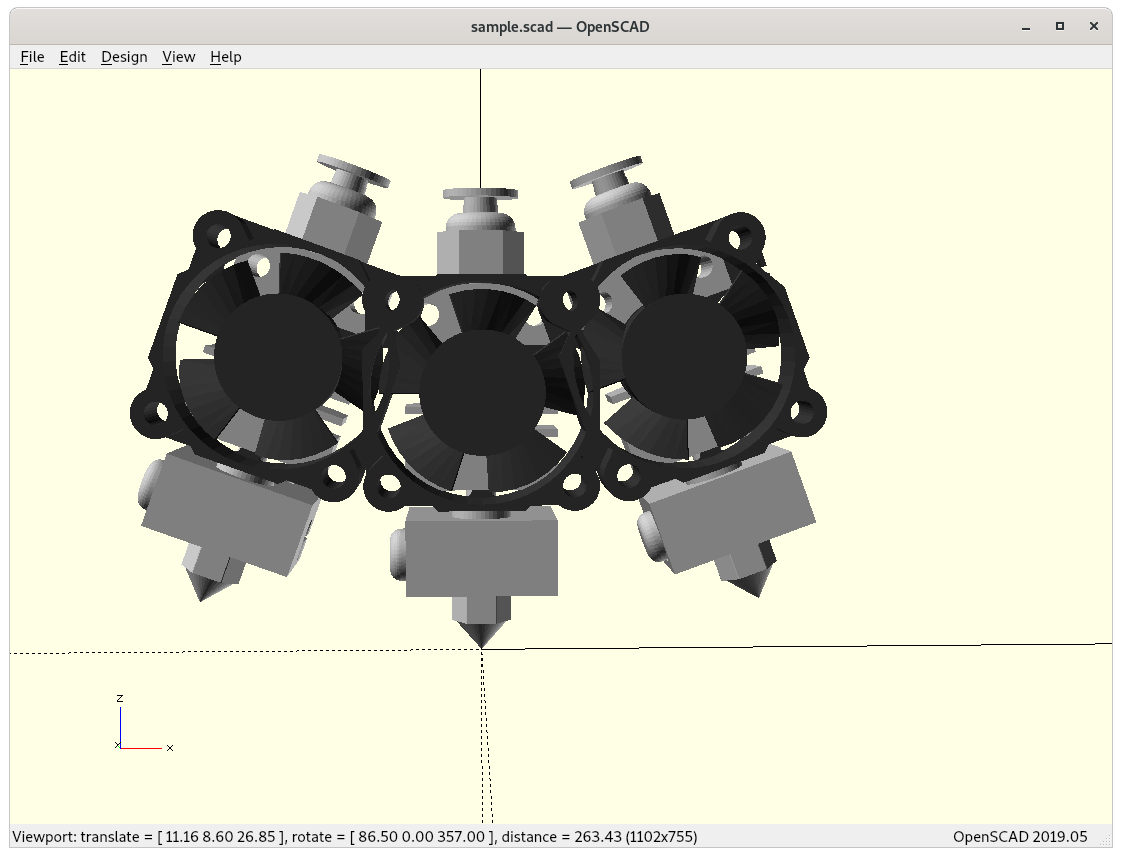
This design is heavier with NEMA17 motor, and with the focus of more than 2 printheads but 3, or 4 printheads, inspired by the Rotating Tilted Nozzle:
4 printheads on 9 sided polygon, 20° tilted
4 printheads, tool 0 (front view)
4 printheads, tool 0 (top view)
4 printheads, tool 3 (front view)
4 printheads, tool 3 (top view)
4 printheads, tool 0, full mount (side view)
4 printheads, tool 0, full mount (side view)
4 printheads, tool 0, full mount (bottom view)
4 printheads with ooze shields (metal sheets)
4 printheads with ooze shields (metal sheets), tool 2
4 printheads with ooze shields (metal sheets), tool 3
4 printheads with ooze shields (metal sheets) (bottom view)
4 printheads with ooze shields & part cooler
part cooler (close up)
4 printheads full assembly
moving mount beneath NEMA 17 to save space for rotating Bowden tubes
moving mount beneath NEMA 17 to save space for rotating Bowden tubes
removing excessive material of the rotor
adding support with new space given
simplifying fan mount
simple fan mount
I first went for 9 sided regular polygon, and then switch to 360°/9 angle and only make a connector where the heatsink/printhead is mounted to.
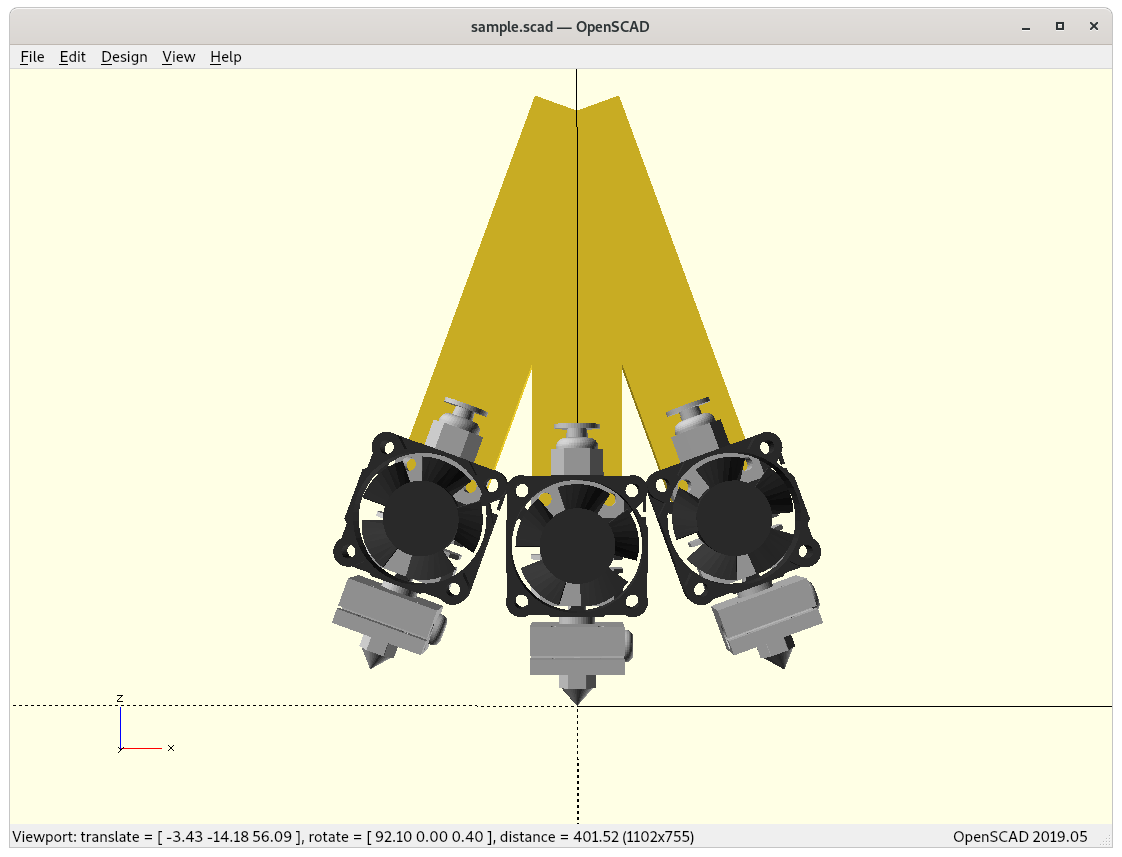
I could tilt the other way and regain some of the Y offset, but the Bowden tube and cable of the printheads would clash with the mount – the same problem arise when I would position the full circle with printheads, it looks nice but doesn’t work with Bowden tubes:
tilted forward, clashes with mount (won’t work)
tilting 10 degrees and position 6 printheads full circle (won’t work)
6 printheads won’t work as Bowden tubes will clash with mount
So for the moment I stay with 360°/9 angle and explore further on the details with 4 printheads/extrusions.
Printable Parts
MSE Y2
Not yet.
MSE Z4
mse_rotz_mount
mse_setup-type=rotaryz,heads_n=4
mse_partcooler_mount
cr10_hotend_fan_mount_simple (4x)
mse_rotz_fannose
Assembly
Each hotend is mounted with 2x M3x20 mounting heatsink, and
2x M3x16 mounting the 30mm fan on top.
4x M3 x 8mm used to mount NEMA 17 on top of mse_rtz_mount, and
4x M3x8 to mount it to the X carriage.
The part cooler mount is attached with M3x10 with a M3 nut and can be adjusted.
MSE Z4 experimental mount on X-carriage
Brief tool changing test:
and guiding the PTFE tubes with a guide:
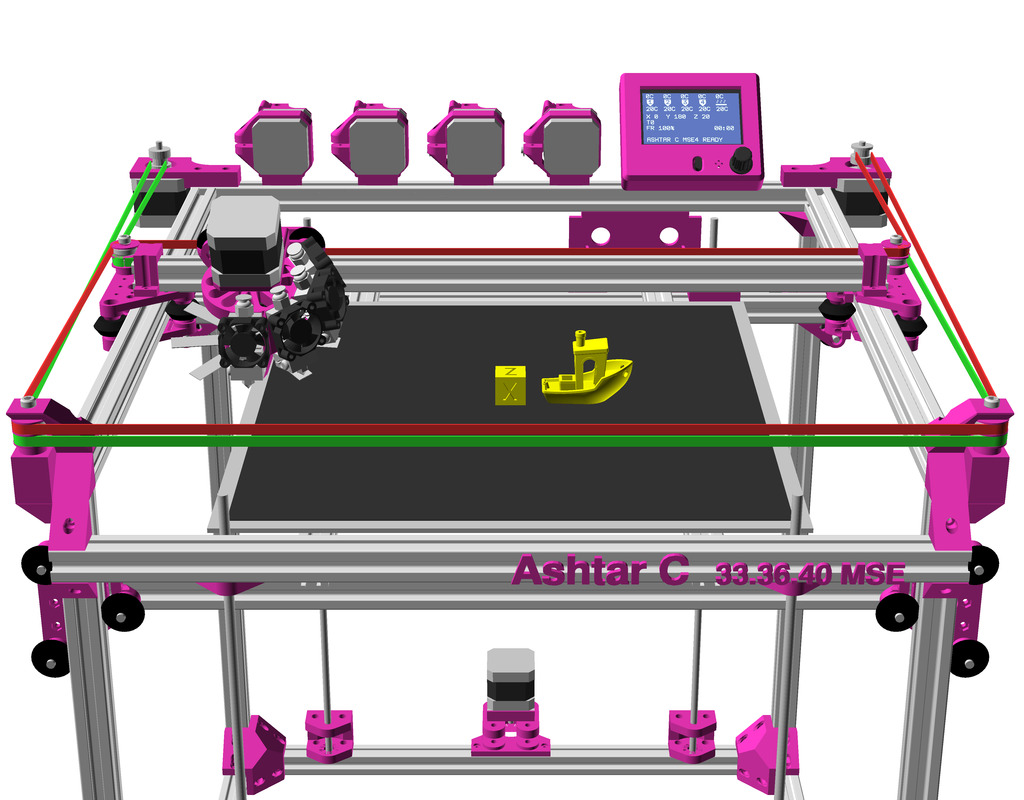
Ashtar K with Multiple Switching Extrusions (MSE)
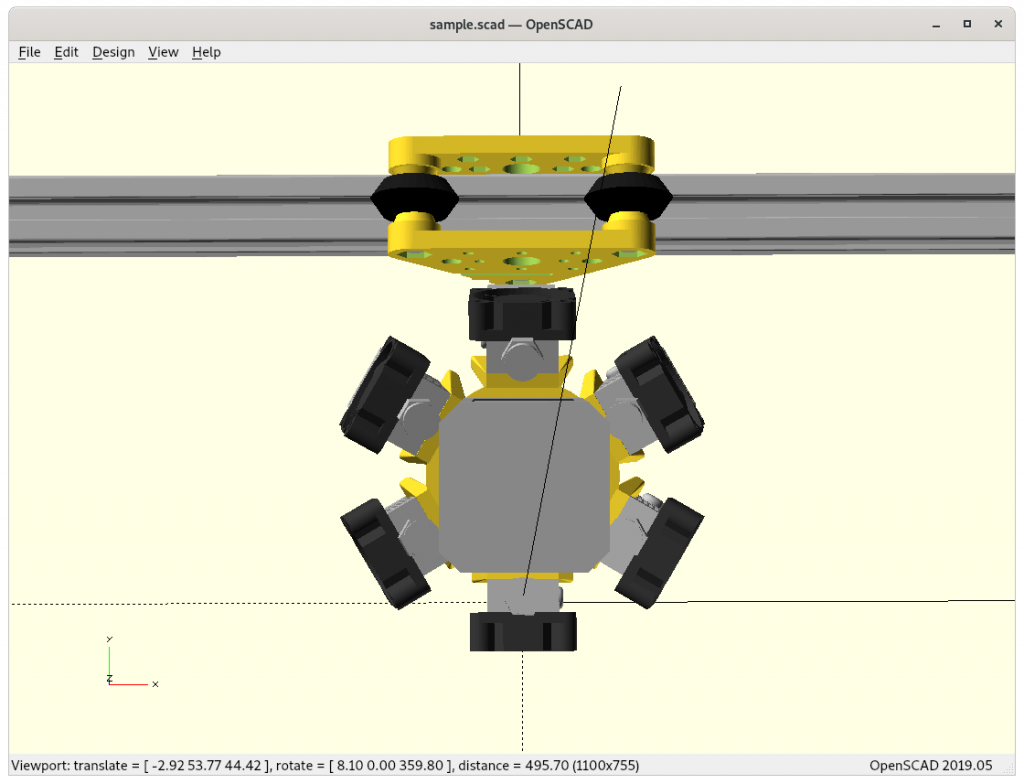
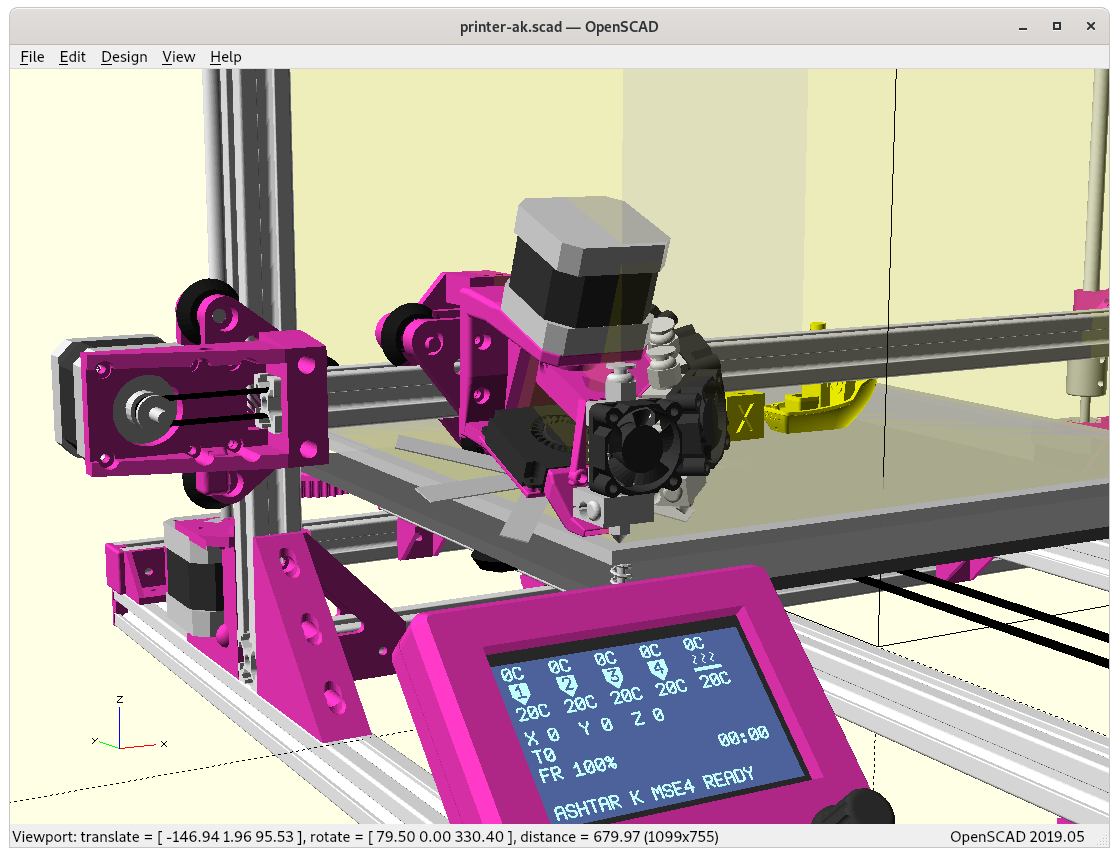
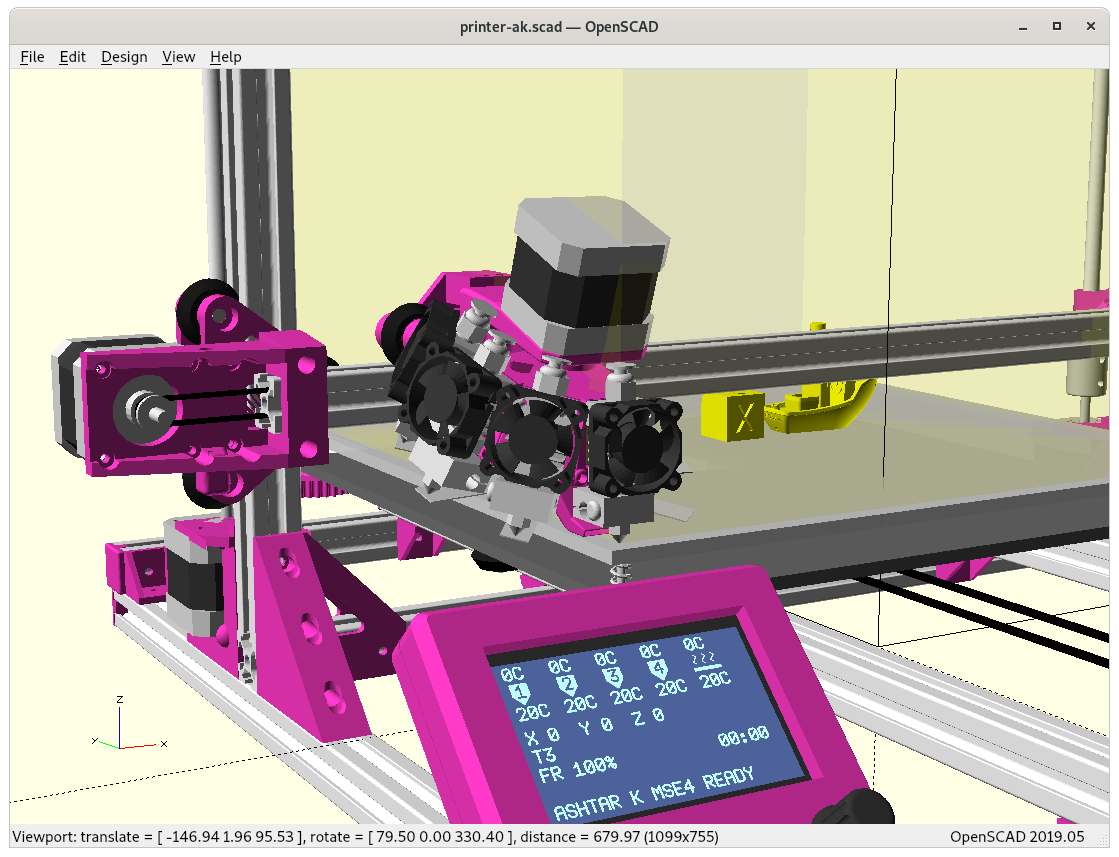
Rotary Z with 4 printheads mounted on Ashtar K to see how much space X and Y is sacrificed or otherwise fit with existing design – so far it looks good:
4 printheads, tool 0
4 printheads, tool 3
4 printheads, tool 0 (top view)
4 printheads, tool 3 (top view)
4 printheads, tool 0
4 printheads, tool 0 (side view)
4 printheads with part cooler
with controller/display, tool 0
with controler/display, tool 3
4 printheads & 4 extruders
This design is more flexible and extendable, the ooze shields are mounted on the “nose” underneath using metal sheets.
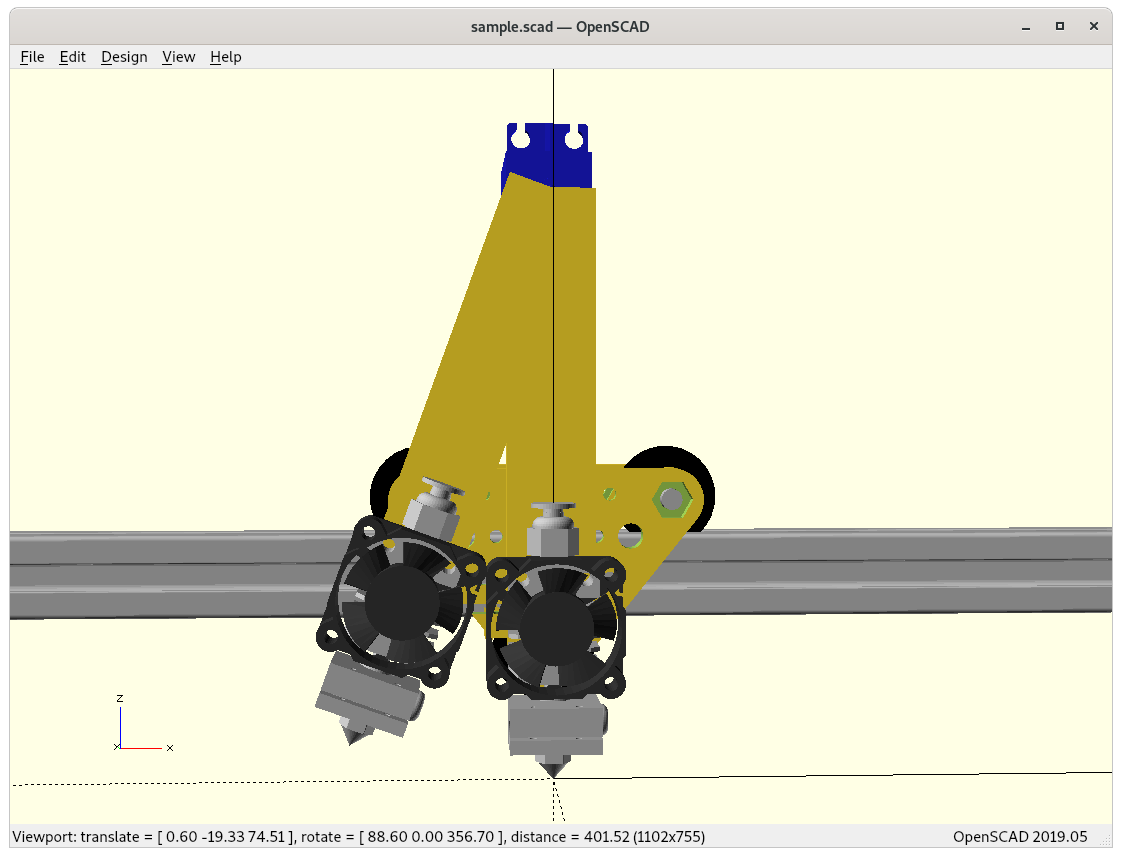
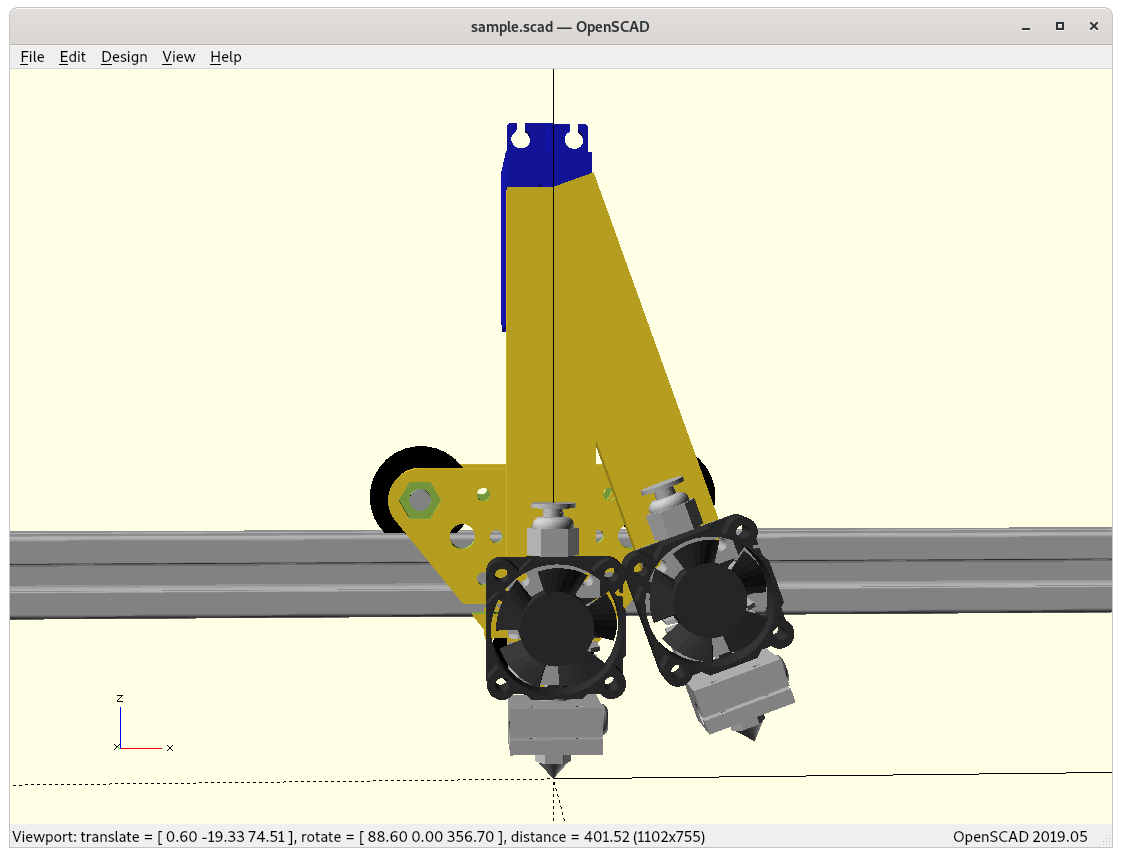
And the Rotary Y with 2 printheads (MSEY2) mounted looks good so far, sacrificing little X space as well:
2 printheads on MSEY2, tool 0
2 printheads & 2 extruders
Issues to Resolve
Rotary Y with Servo
mature draft to something actually promising, done with SG90 servo
strength to hold angle, likely use servo to constantly push toward a mechanical limit, dual mode: left/right limit, tripple mode some kind of spring the servo has to overcome
alternatively using magnets (e.g. 6mm/0.8mm) on anchor and stoppers: pushing anchor without servo or motor, but pushing carriage to X home left and X home right to switch between two states
reposition reliability, some kind of spring mechanism, and servo is only used to “jump” to new position
mount to X carriage, servo clashes with belt mount, resolved
press-fit 625 ZZ bearings based switch axis
sufficiently narrow play/margins for printing? tests needed
dual bearings still wobbles in Y-axis (when mounted)
single bearing doesn’t wobble, more friction when switching
Rotary Z with NEMA 17
early draft, untested
rotation tested: 40° per tool, e.g. G1 A0, G1 A40 in RepRapFirmware (Duet3D boards)
testing holding torque when printing (nozzle running over overextruded parts)
mount heatsink fans, done
rotary angle calibration at start, position/tool #0 (0 .. heads_n-1) => tool number (e.g. T2)
either mechanical homing of the rotation to position/tool #0 or
end stop switch to home rotation position
ooze shields. mounting for metal sheets prepared & illustrated
heat creep toward the “nose”?
do ooze shields add to cross-contaminating when changing tools
paying attention to details how to bend metal sheets
mount to X carriage, done
part cooler, will be tricky as, resolved
above mount won’t work due Bowden tubes cross through
mount via “nose” where the non-ooze metal sheets are mounted, done
Marlin firmware tool changing Gcode support with NEMA17 rotating?
rings around NEMA 17, in particular around the edges
combine tubes & wires above the motor
Considerations
Rotary Y 2
Pros
simple mechanical setup incl. ooze shields
fast switching of extruders
Cons
servo SG90-based: only suitable for dual setup (not extendable to 3 extruders)
Rotary Z 4
Pros
fast switching of extruders
heavier than a servo, but more reliable holding position
simple design, as this design mounts on all of Ashtar Series (K, C, M & D)
2, 3 or 4 printheads/extruders mountable, more flexible than IDEX which only has 2 printheads and requires more modifications
Cons
additional moving weight on X axis (NEMA17)
loss of build volume in X space ~5-10mm left and right
optional loss of build volume in Y space, it can be compensated if printer is used with MSE option only, otherwise some Y space sacrificed as well ~20-30mm
ooze shields may contaminate material to rotating nozzles, needs to be tested
all nozzles are heated even when not currently selected but will be used during the print
some people still print a purge block to purge material from the nozzle newly selected – fast switching material should be ok, long wait between switches may require purging of material – tests needed
Requirements
Rotary Y
1x SG90 servo
2x 625ZZ bearings
1x M5x25 screw
1x M5 nut
50mm x 1mm wire, bend as hinge
Rotary Z
1x rotating motor (NEMA17 20/25/39 mm) with motor driver
per additional printhead (given there is a single printhead already installed)
printhead (heatsink, heatbreak, heatblock, heat cartridge, nozzle, push fit adapter for bowden)
heating driver on the mainboard
thermistor input on the mainboard
So for
2 printheads: 2x additional NEMA17 (1x rotating motor + 1x additional extruder), 2x 40W = 80W power
3 printheads: 3x additional NEMA17 (1x rotating motor + 2x additional extruders), 3x 40W = 120W power
4 printheads: 4x additional NEMA17 (1x rotating motor + 3x additional extruders), 4x 40W = 160W power
Obviously you need a mainboard with sufficient heating drivers or (1 digital output and MOSFETs per hotend) and thermistor inputs (ADC), the motor drivers can be added to 2 digital outputs (STEP & DIR) and external motor driver. More detailed informotation will be added later.
Gallery
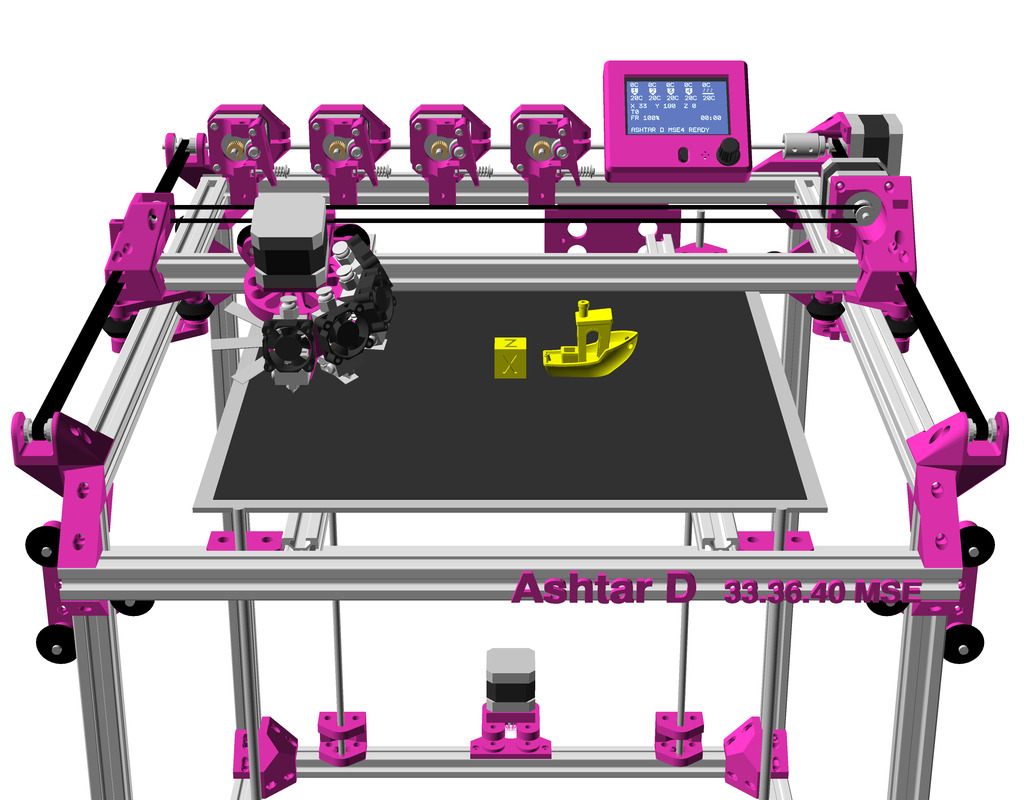
Very early draft to see how MSE4 looks mounted on Ashtar K, C, D and M:
in theory no purge block, but if ooze shields are shared among switching extrusions (more than 2 extrusions) there may be cross-contamination between colors/materials
the printheads individually are proven to be reliable
Hints:
single heatblock = same print temperature
dual heatblock = different print temperatures possible
[..] a novel 4-axis FDM printing process with a newly designed printhead, for the printing of overhangs without support structures. With conventional FDM printing, overhangs of more than 45deg–60deg must be supported.
For this novel printing process, the printhead is rotated 45° around a horizontal axis and equipped with a vertical, rotational axis. The printhead no longer follows layers parallel to the build platform, but moves on the surface of a 45deg cone. The printing cone increases in diameter from layer to layer. With this cone-shaped layers, the printable angles increases by 45°, which leads to printable overhangs of up to approximately 100°.
New slicing strategies for this printing process have been developed to slice the parts for the novel printing process. The feasibility of the concept has been prototypically demonstrated. The novel design achieves the advantages of higher speed and quality with lower cost at the same time.
A brief video sequence of printing (YouTube) shows the machine movement. Unfortunately, as of 2021/01 not much more details have been published by ZHAW except a paywalled paper [sigh] which contains useful overview of their research. I contacted ZHAW and Michael Wuethrich mentioned that they are in negotiations with different companies to develop a product (2021/01) and eventually release the details of their slicing approach with pre- and post-processing while using an ordinary slicer.
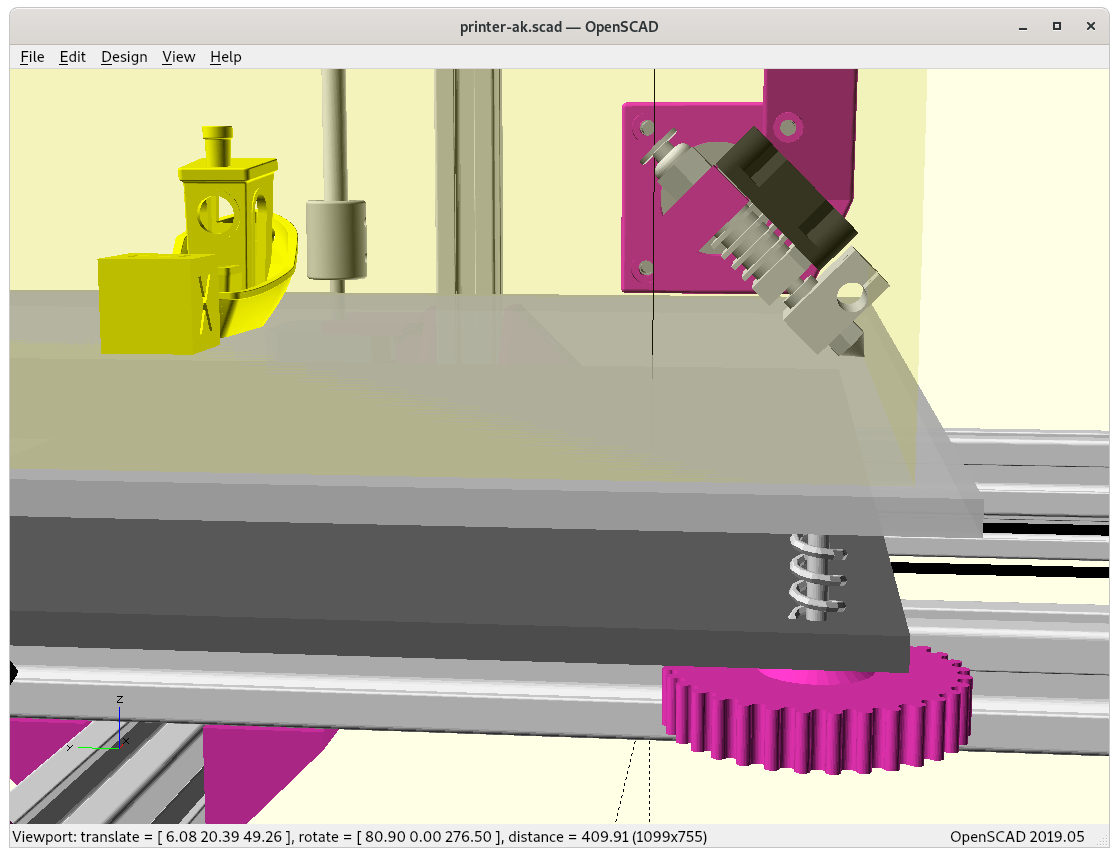
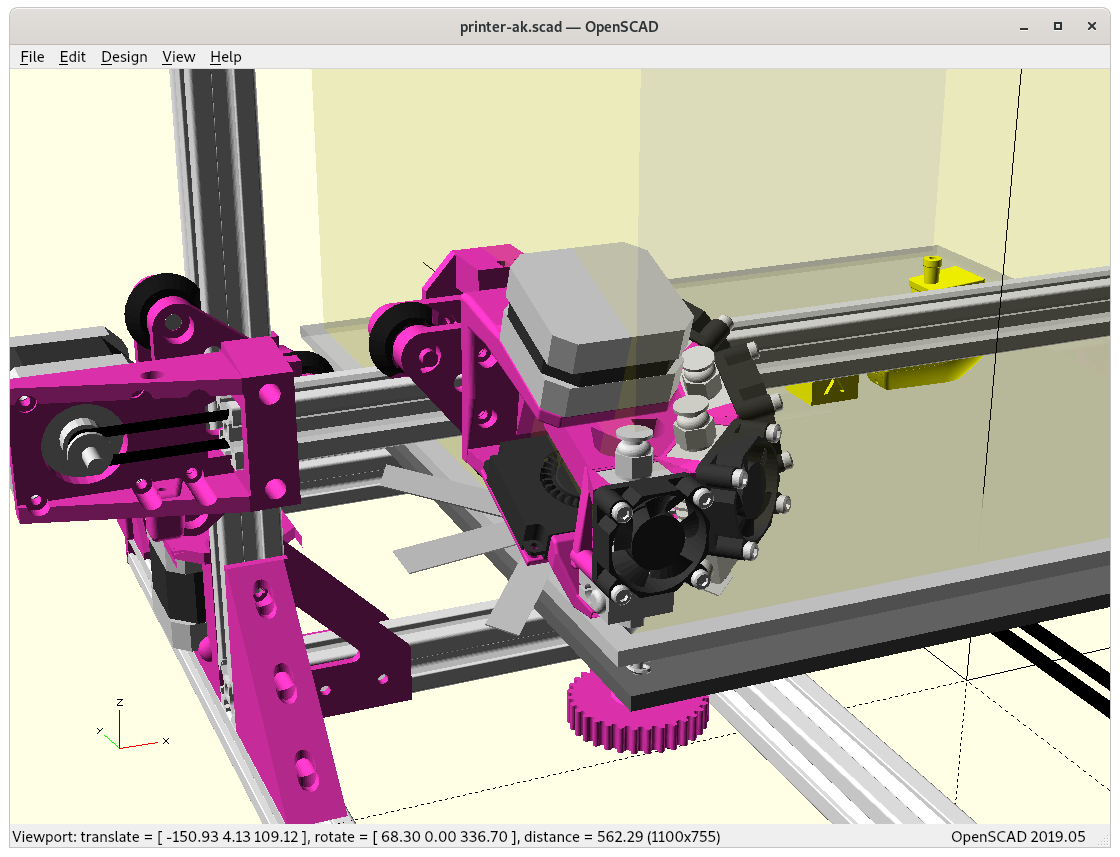
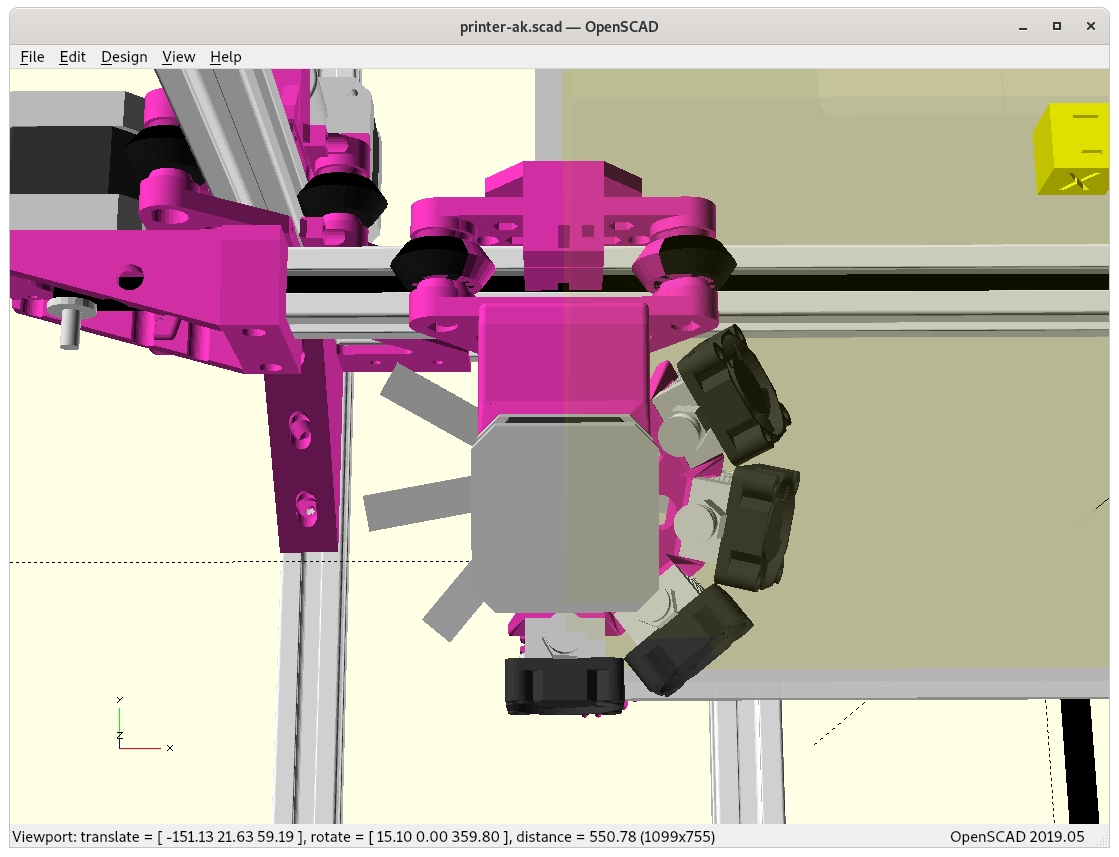
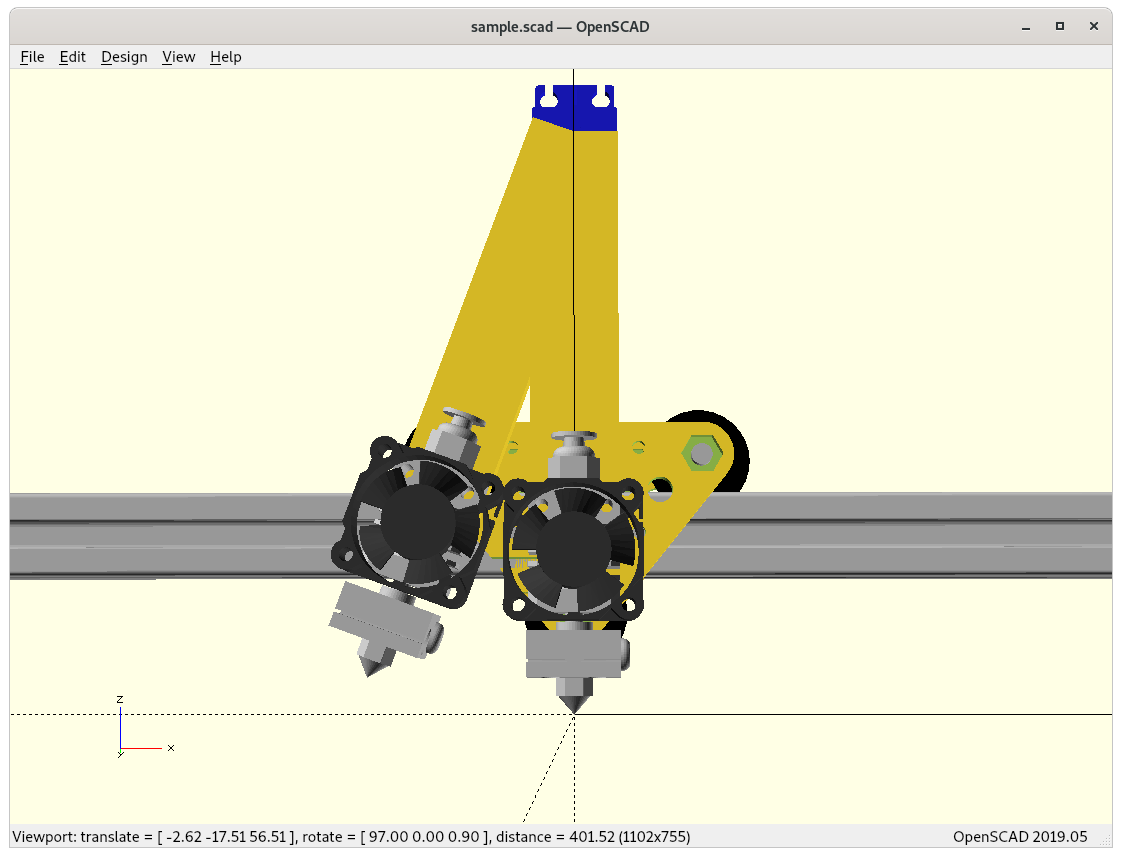
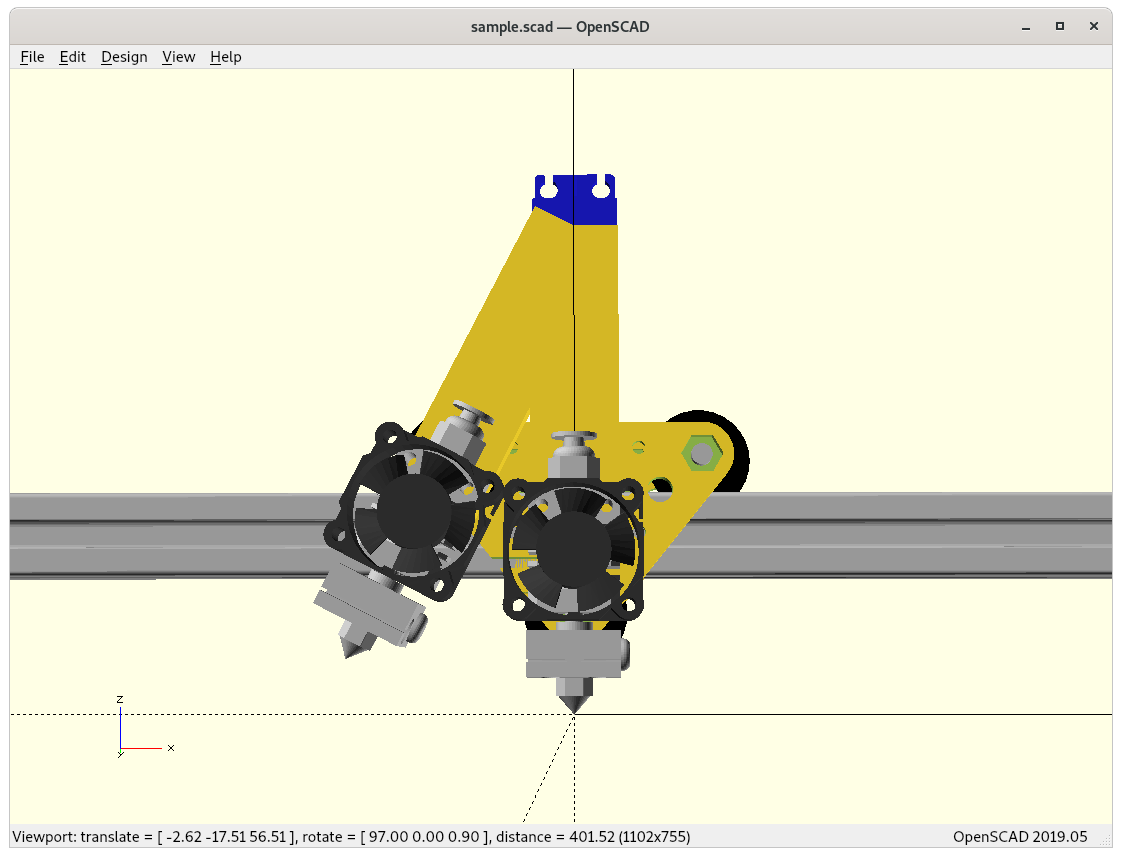
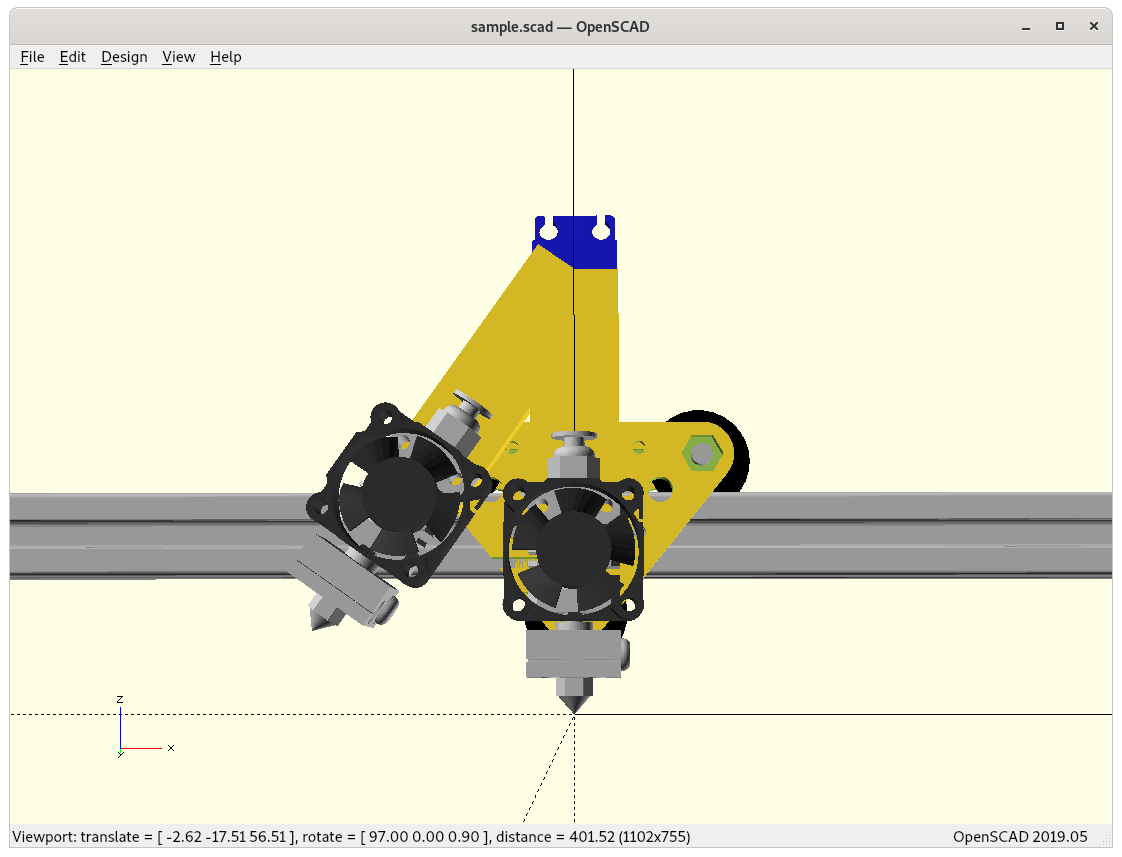
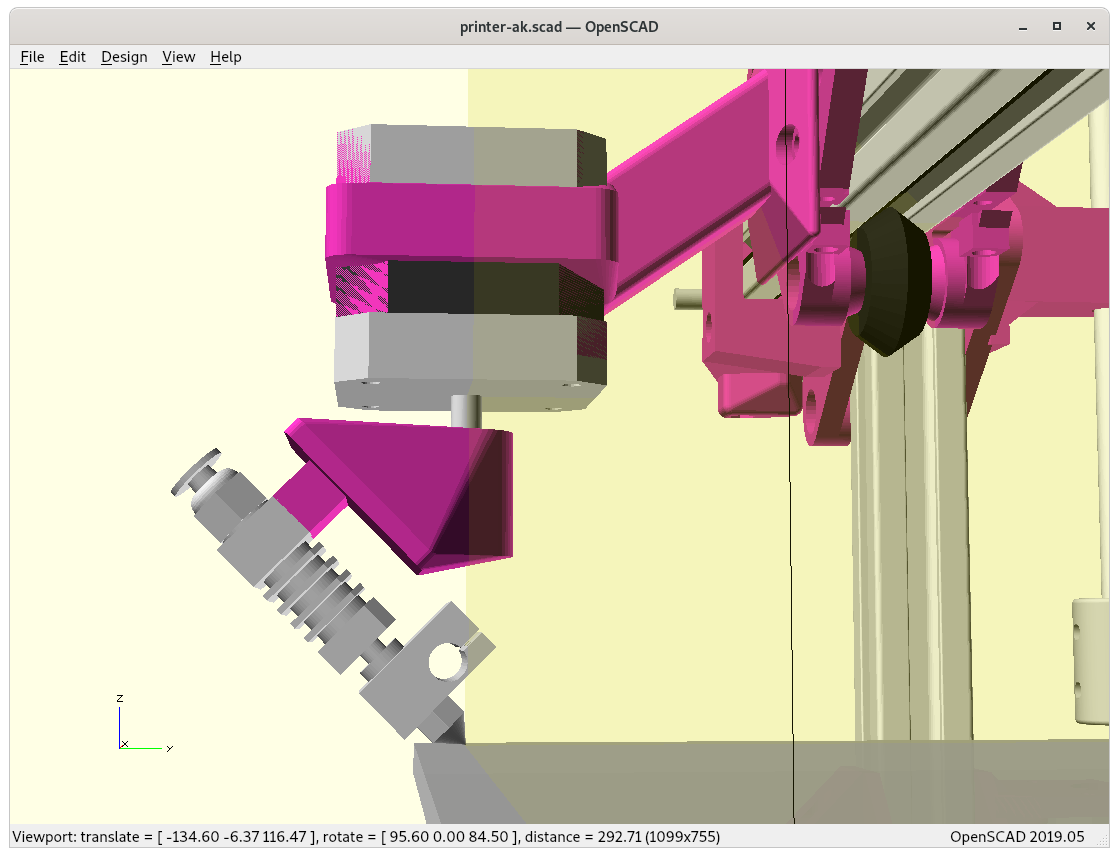
I thought to try my own implementation of this Rotating Titled Nozzle 4 Axis option. The main idea to keep the entire hotend in Bowden style and rotate that around only once (non-continuous) with all wires, that would simplify things greatly:
45° titled nozzlerotating 45° tilted nozzlerotating 45° tilted nozzleat 0° rotation positionyet no space for bowden tube at -180° or +180°… therefore to make some distance.. with proper mount
The challenge is the +/-180° position when the nozzle opening looks forward, where the printhead bowden tube (and all cables) comes most close to the X beam. As a consequence only -180° to +180° rotation is allowed and not multiple revolutions.
It would also mean, once the printhead reaches -180°, and it has to rotate to +180° and decrease from there again to fulfill 360° rotation – whether this is suitable has to be seen, this likely creates a seam there.
The main advantage of this simplified 4 axis approach is to use existing pieces plus just an additional NEMA 17 motor.
Update 2021/01/26: Wuethrich from ZHAW mentioned that they started first also with a full printhead rotating but then switched to the more complex continuous rotating printhead to avoid a seam, have direct drive extruder, faster prints as simpler decision making to change rotation direction and no start/stop of rotation and de/acceleration when reaching -180/+180° position.
Single Revolution with Rotation Shadow
As I pondered on the limits of single rotation approach, there is a range where the bowden tube (and all wires with it) is touching and bending on the X carriage or printhead holder – let’s call it the rotation shadow – ideally it would be zero or slightly sub-zero to have a bit overlap to conceal a possible seam with “ironing” the section (move nozzle over section without extruding).
E3D Volcano
My first attempt is modeling with E3D Volcano hotend like the RotBot by ZHAW:
4D E3D Volcano at 0° Z rotation4D E3D Volcano4D E3D Volcano4D E3D Volcano: rotation shadow (red) – top view4D E3D Volcano: rotation shadow (red) – bottom view
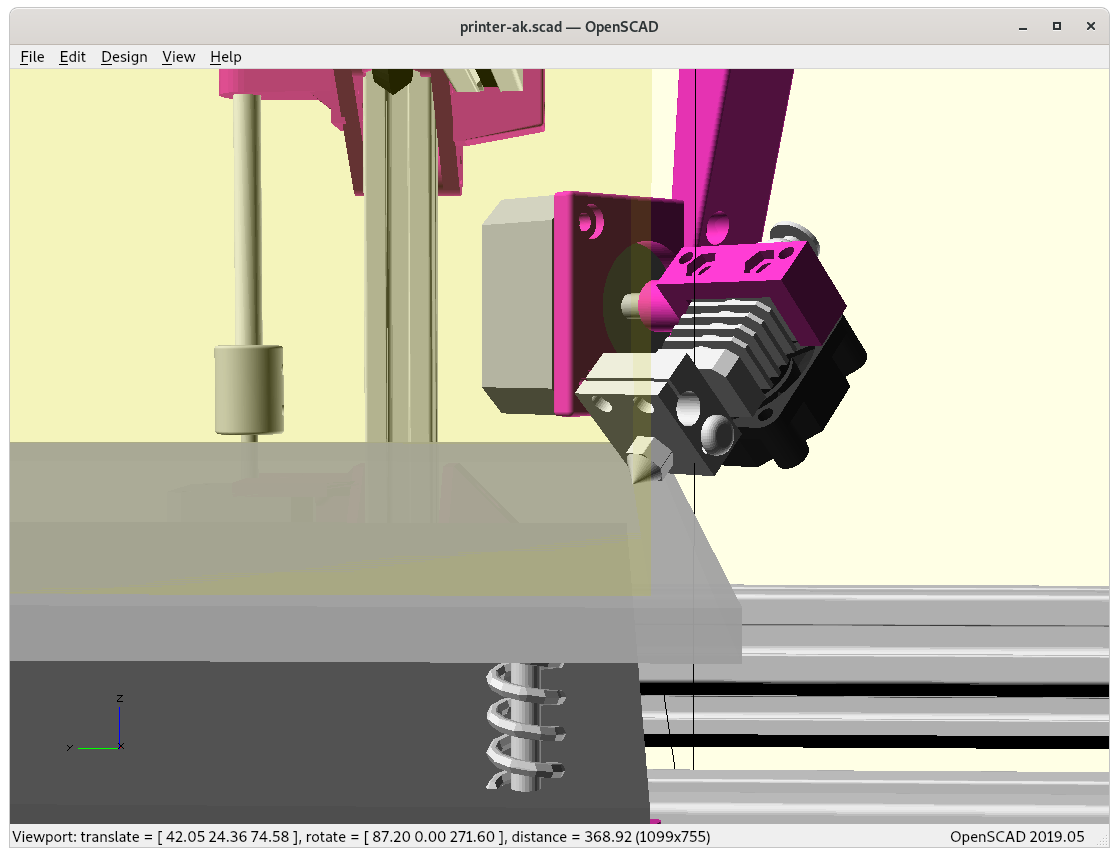
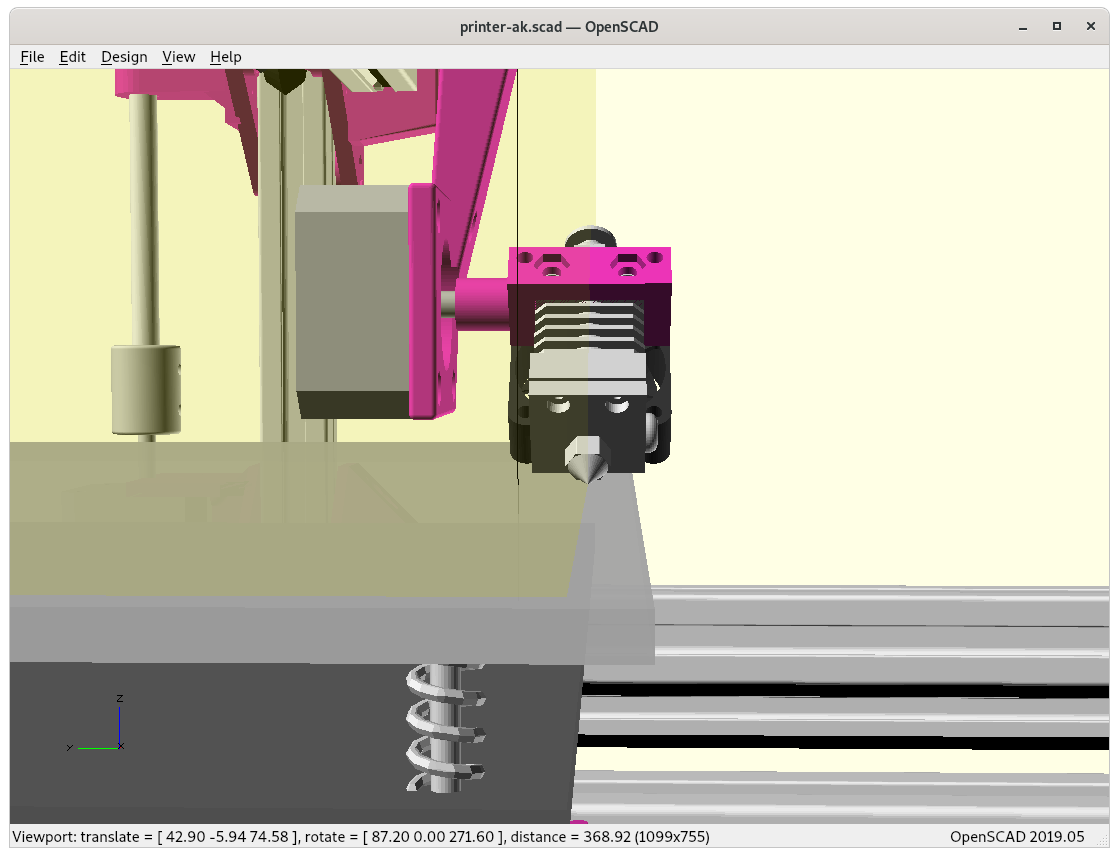
Micro Swiss / CR 10 Hotend
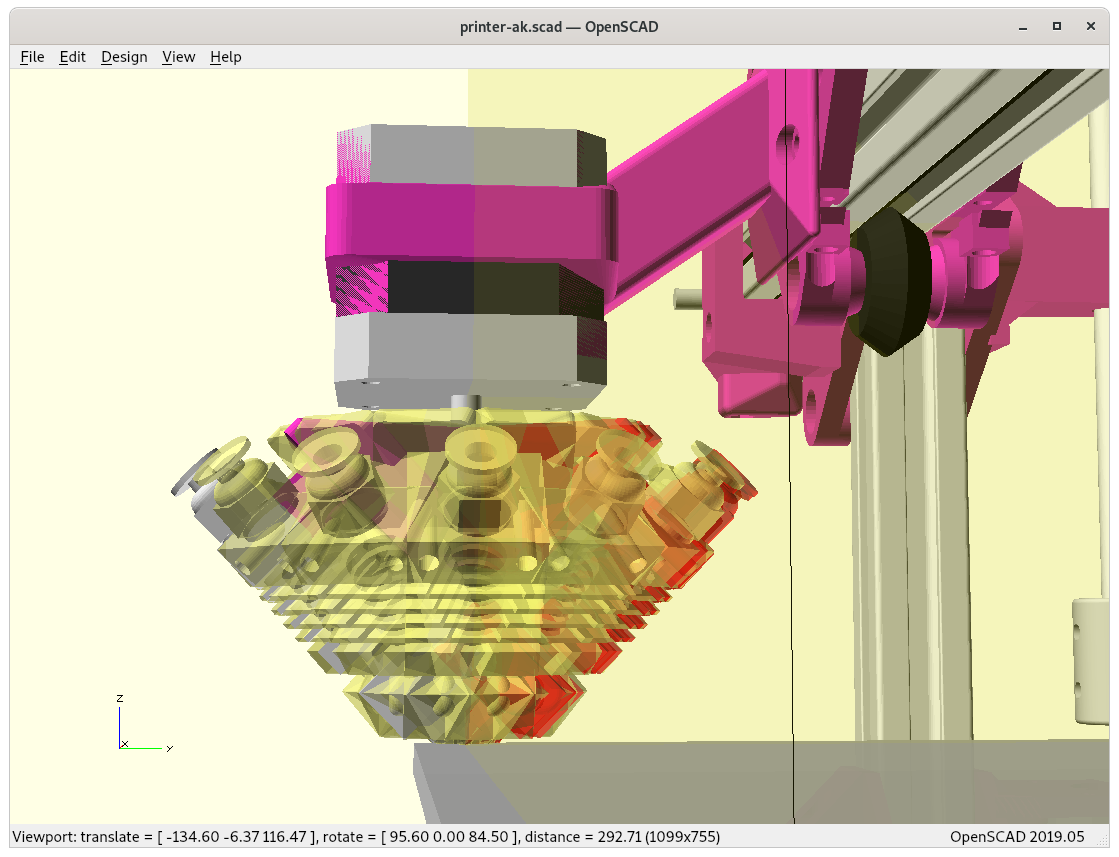
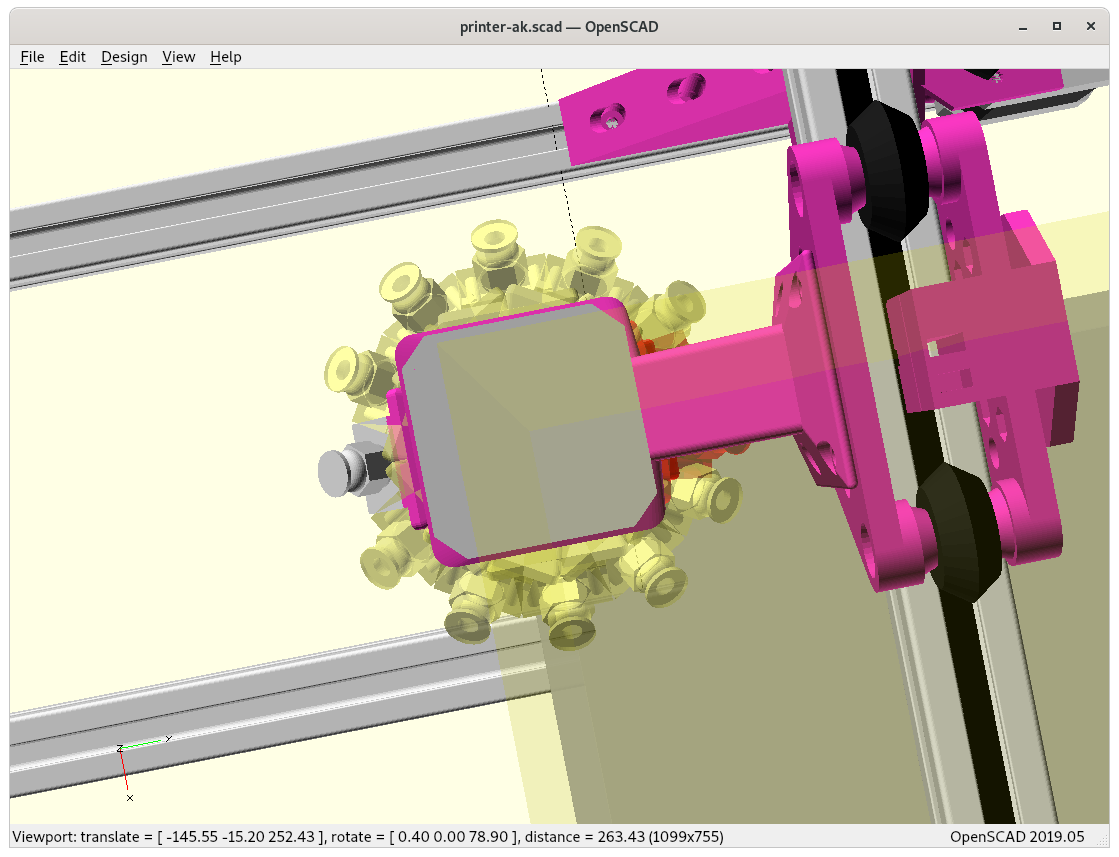
And as alternative the smaller Micro Swiss / CR 10 printhead which gives significant more space for the bowden tube (and all wires with it) to bend or flex near -180/+180°:
4D Micro Swiss at 0° Z rotation4D Micro Swiss4D Micro Swiss4D Micro Swiss: rotation shadow (red) – top view4D Micro Swiss: rotation shadow (red) – bottom view
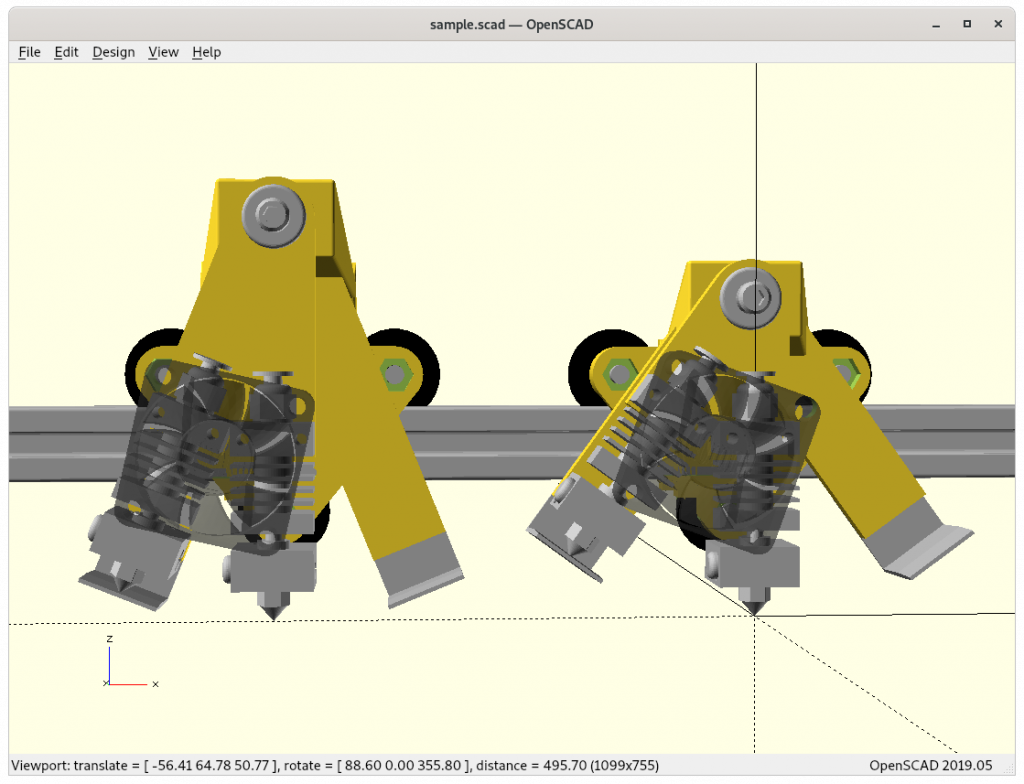
Comparison Volcano vs Micro Swiss
4D with E3D Volcano4D with E3D Volcano4D with E3D Volcano4D with Micro Swiss / CR10 hotend4D with Micro Swiss / CR10 hotend4D with Micro Swiss / CR10 hotend
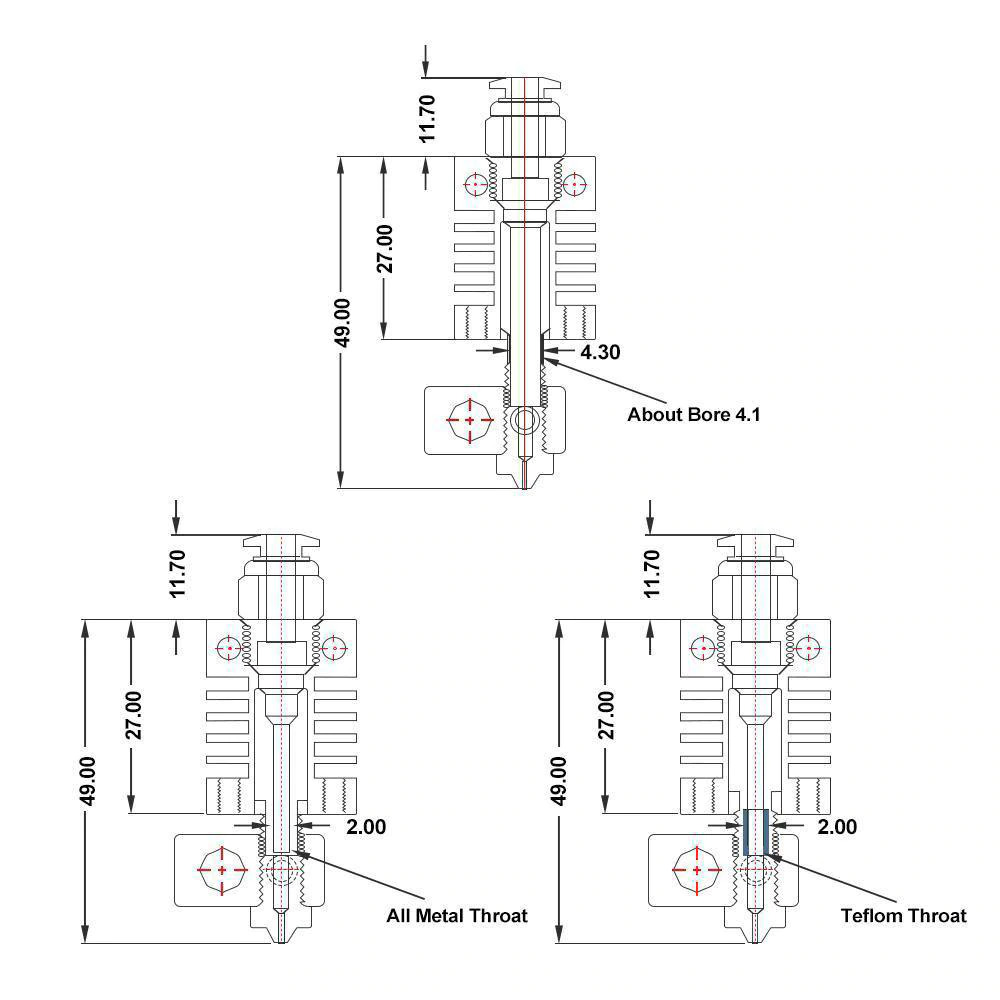
At this point I continue with the Micro Swiss (MS) option, as the smaller heatsink gives me more space to make full 360° turn with -180° to +180° and have ~0° rotation shadow, perhaps even sub-zero as of overlapping.
This particular Swiss Micro clone aka CR10 hotend comes without screws stabilzing the heatblock, and just a small worm-screw fastening the heatbreak on the heatsink, yet make it easy to adjust the overall length, which in this case is desired.
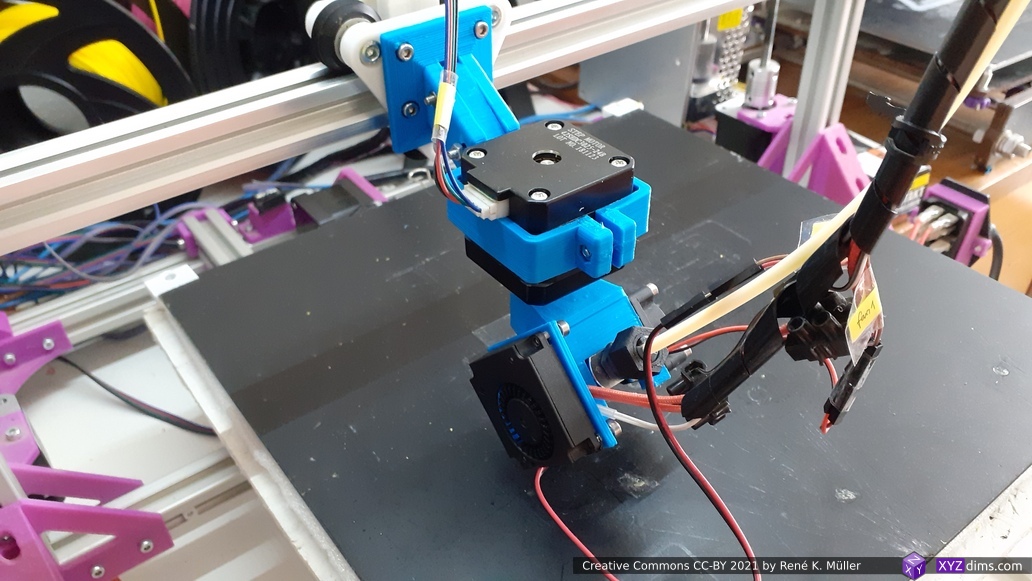
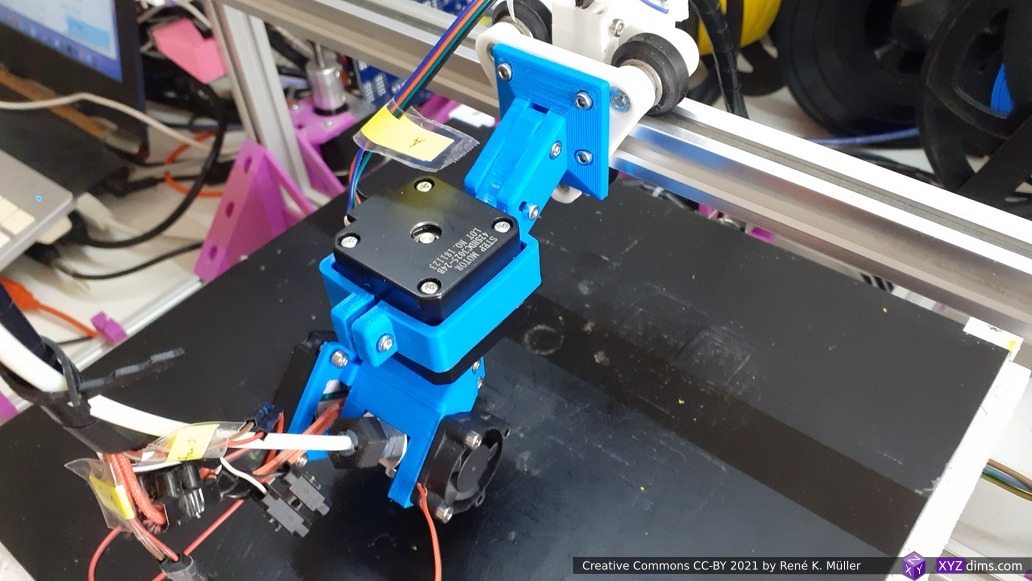
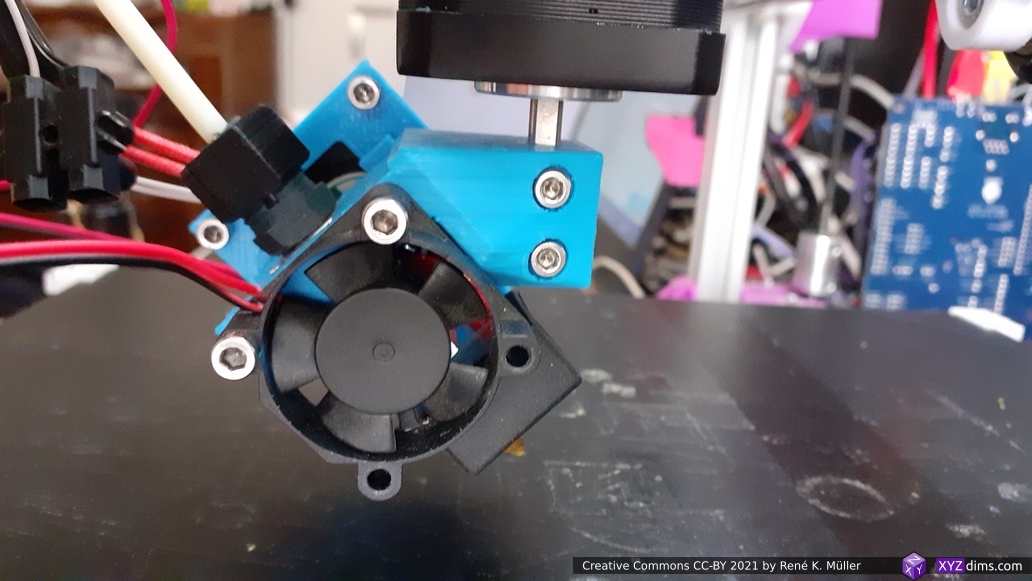
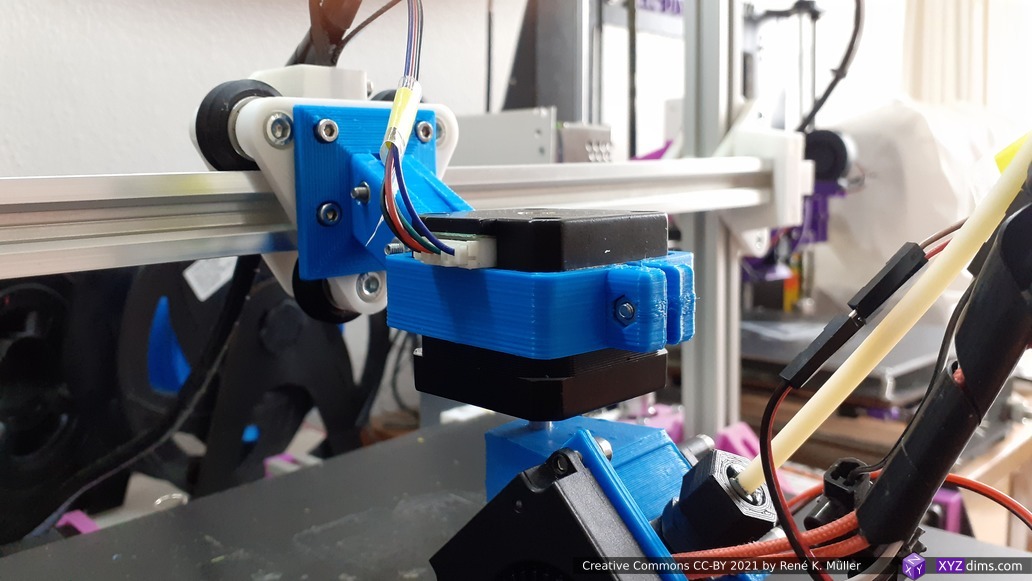
Prototype
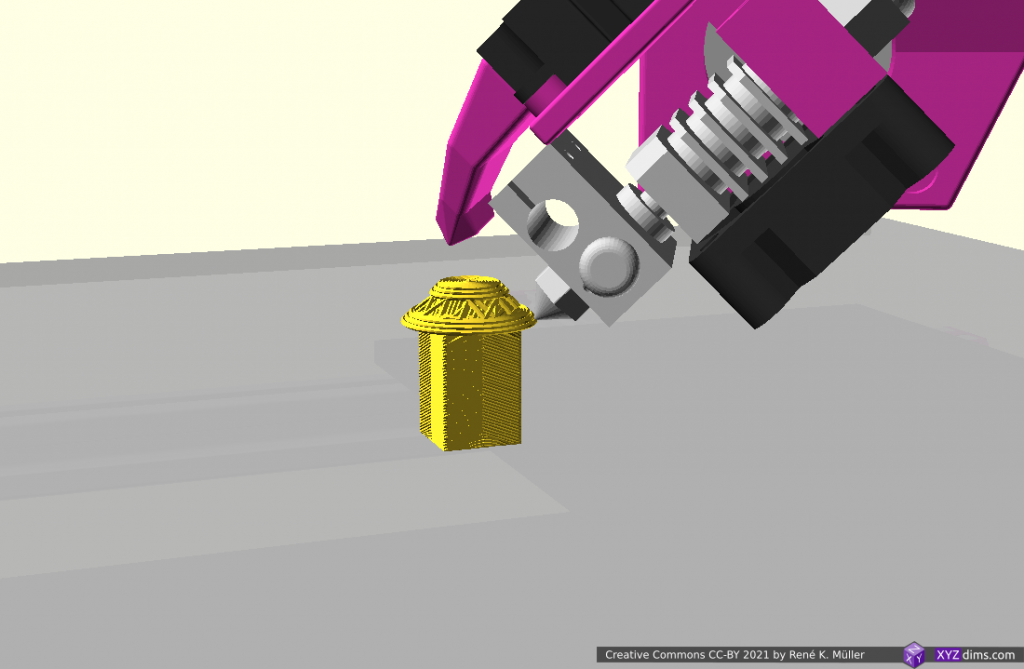
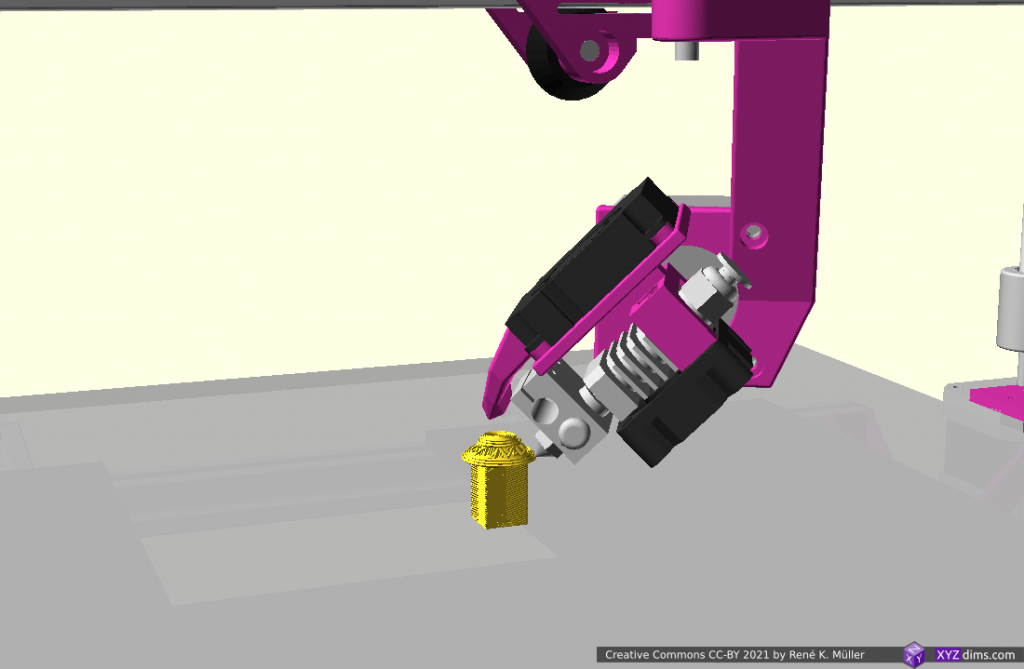
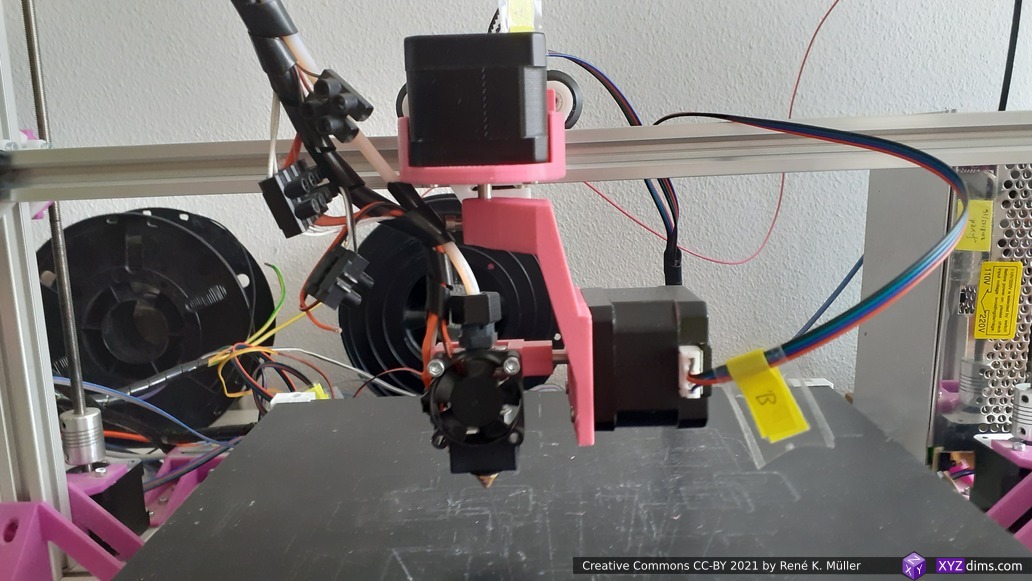
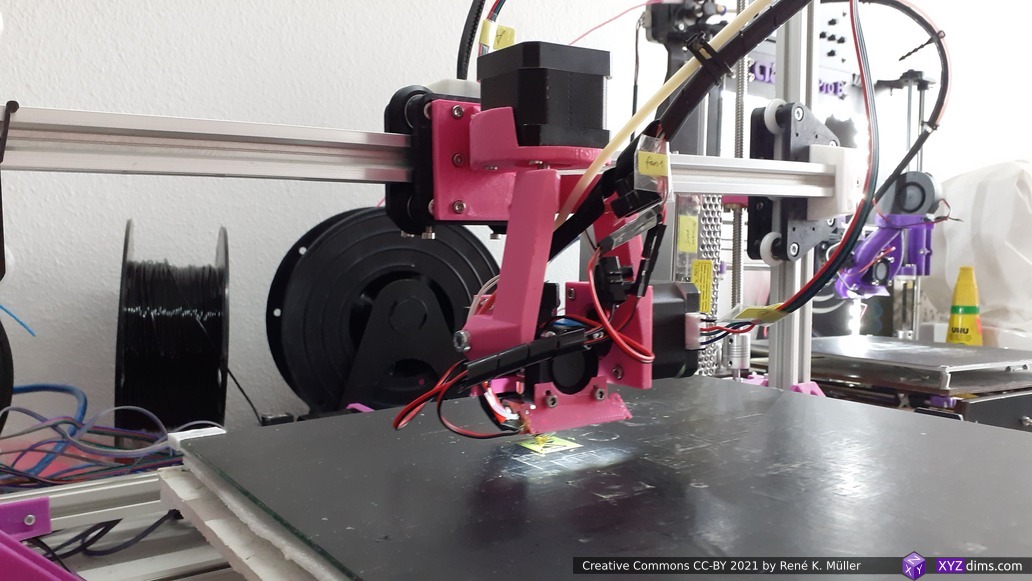
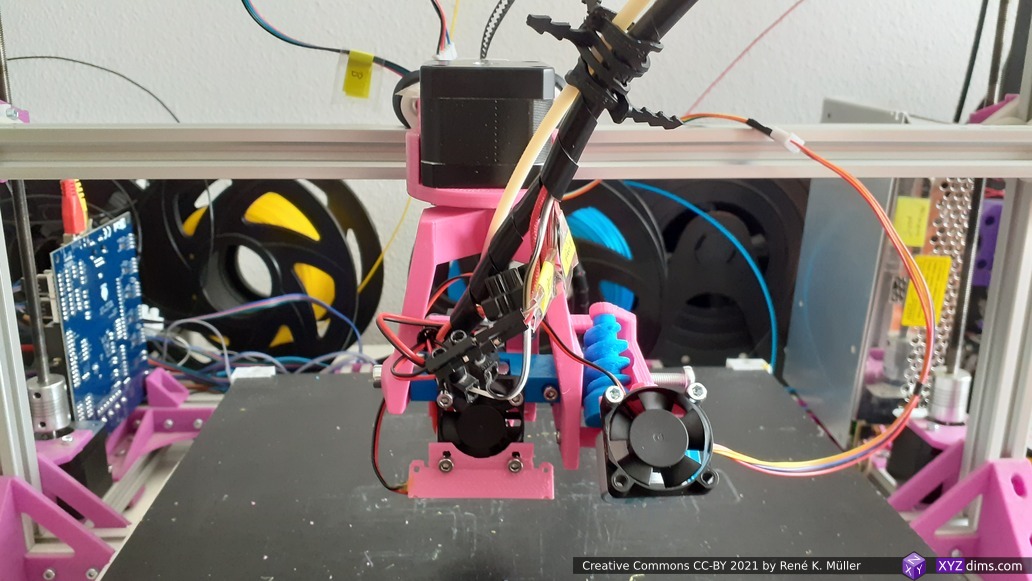
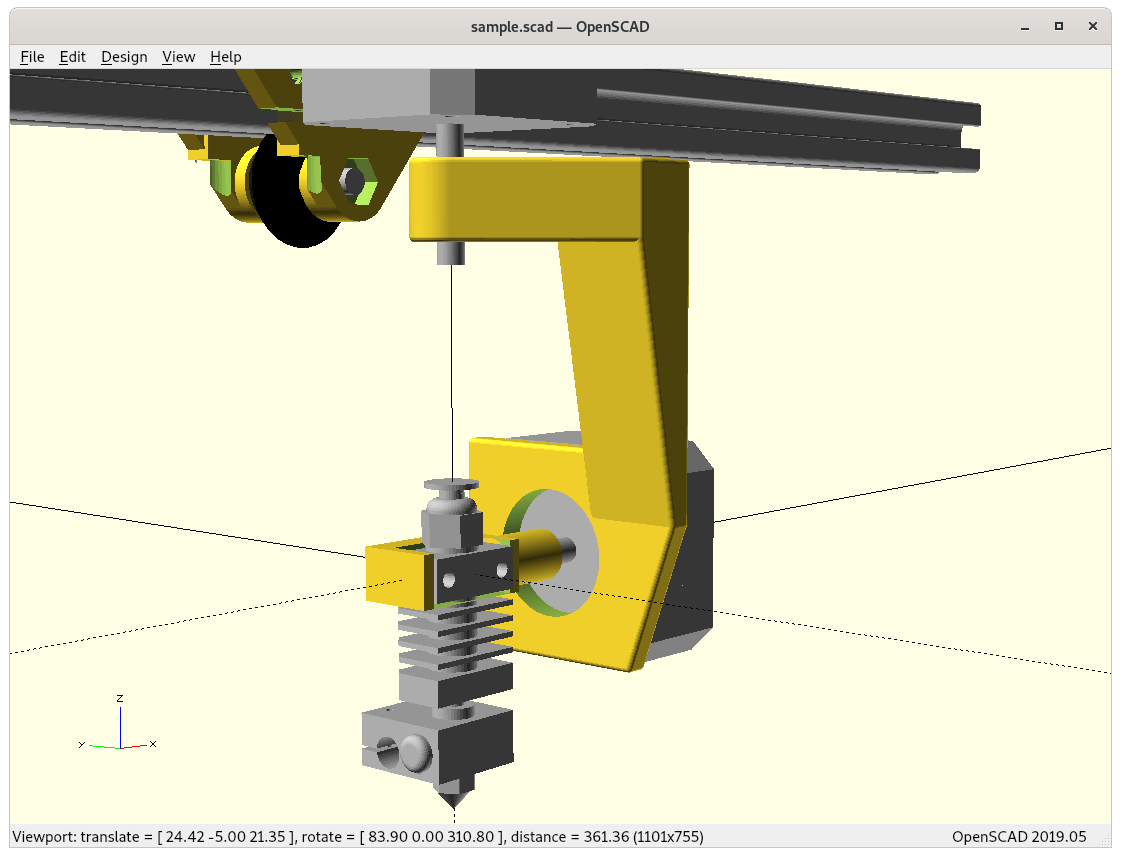
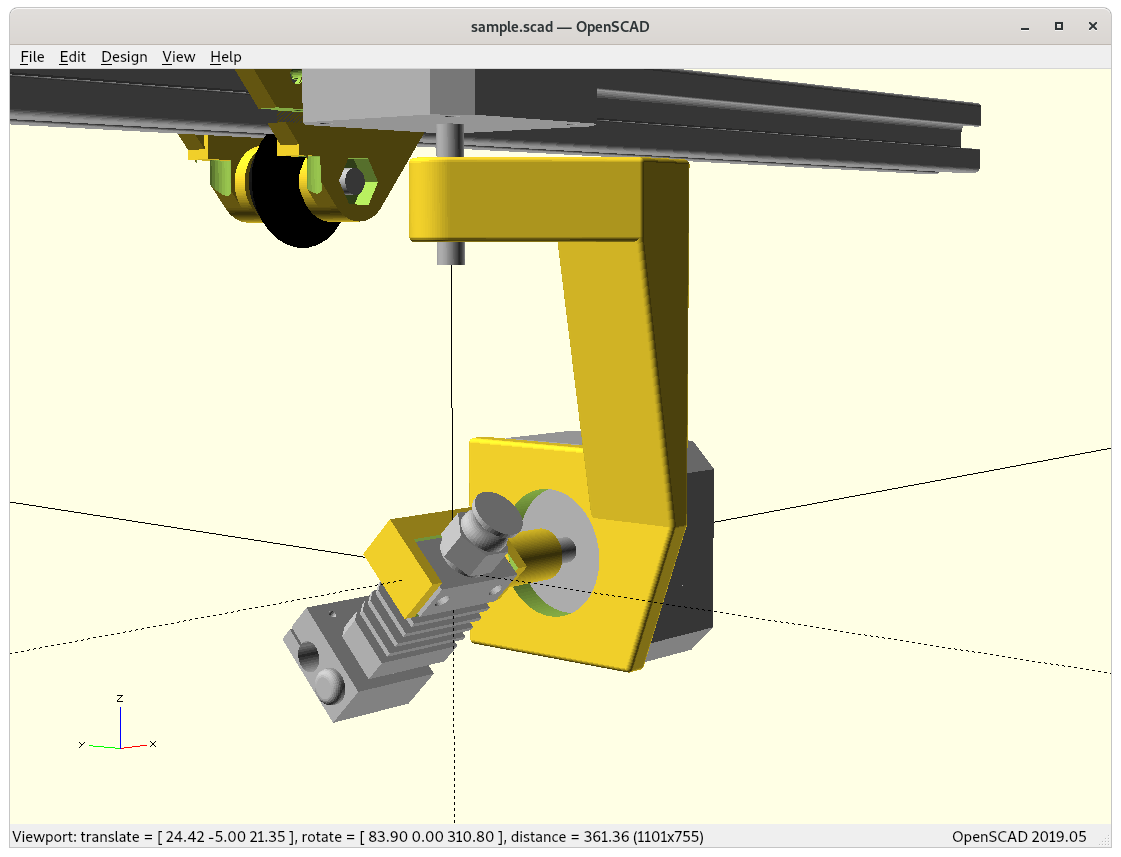
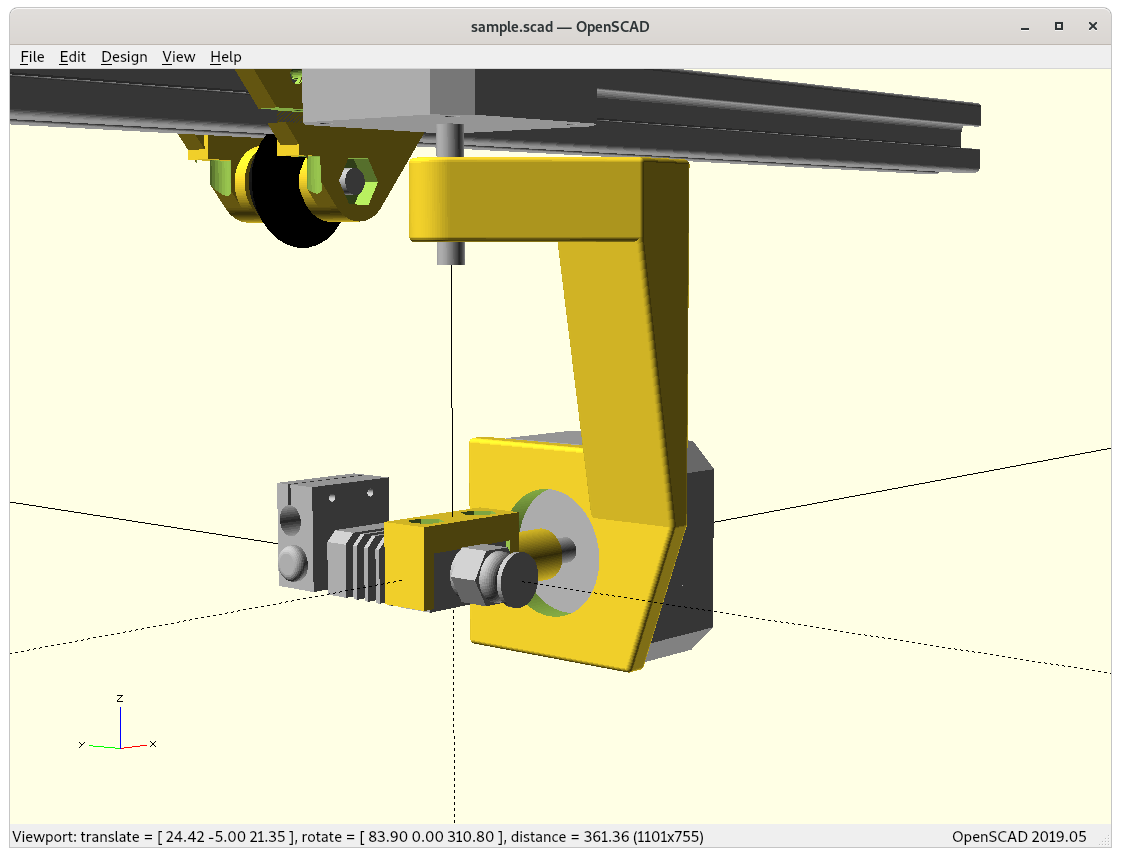
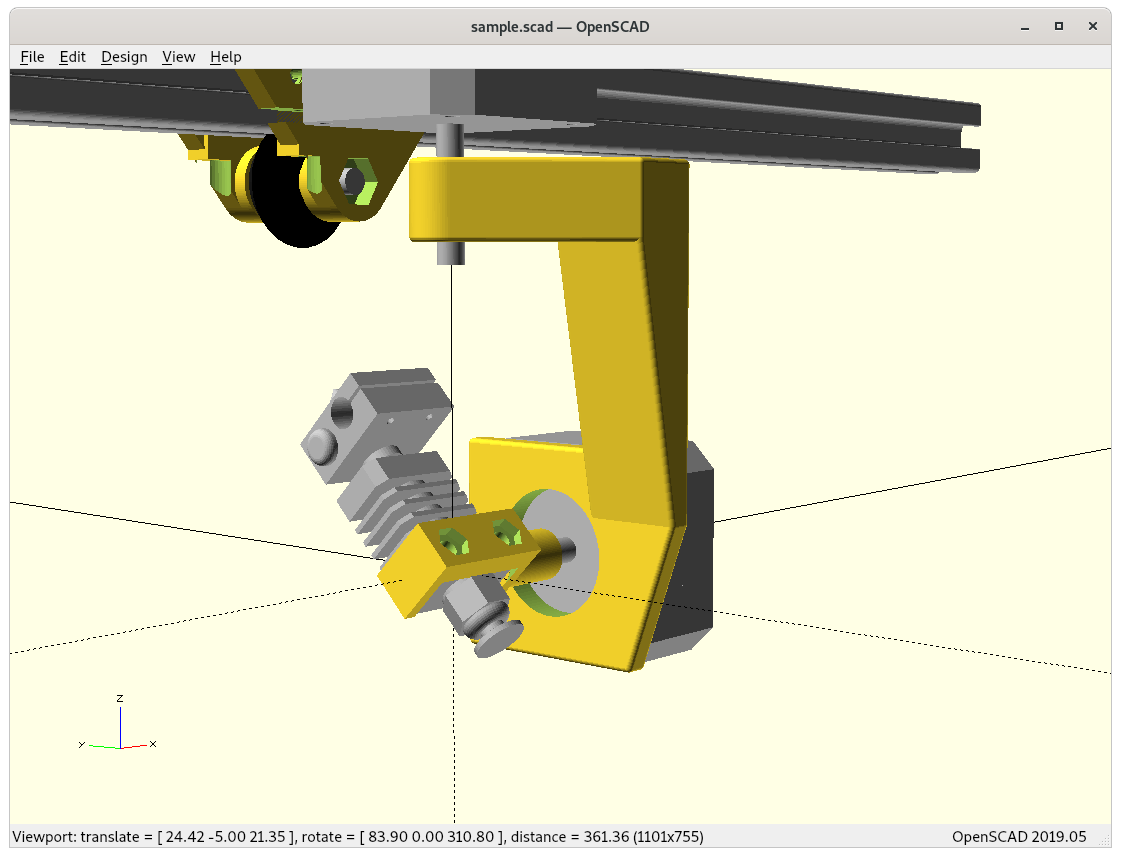
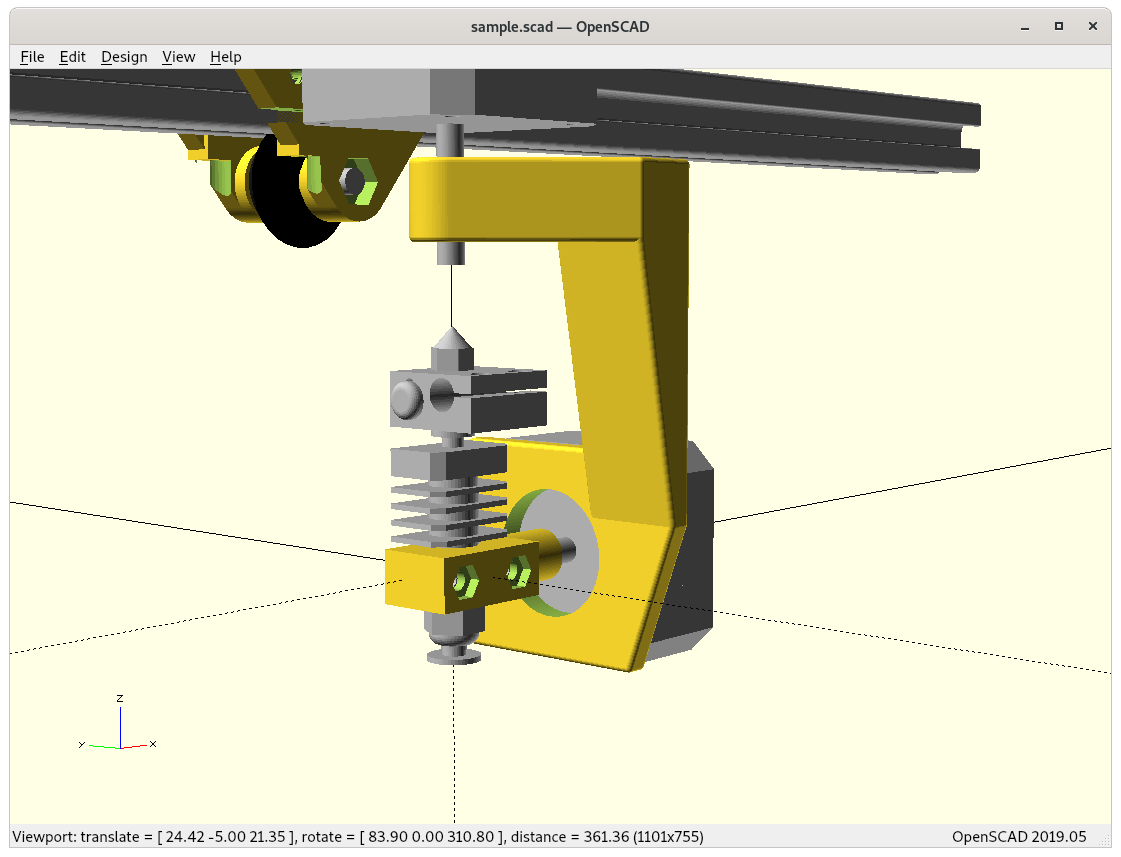
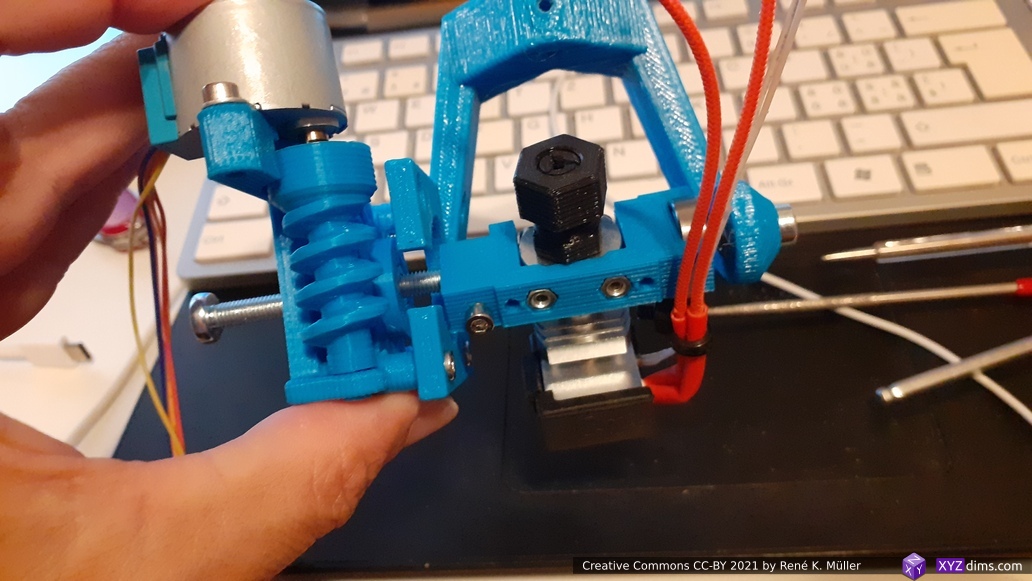
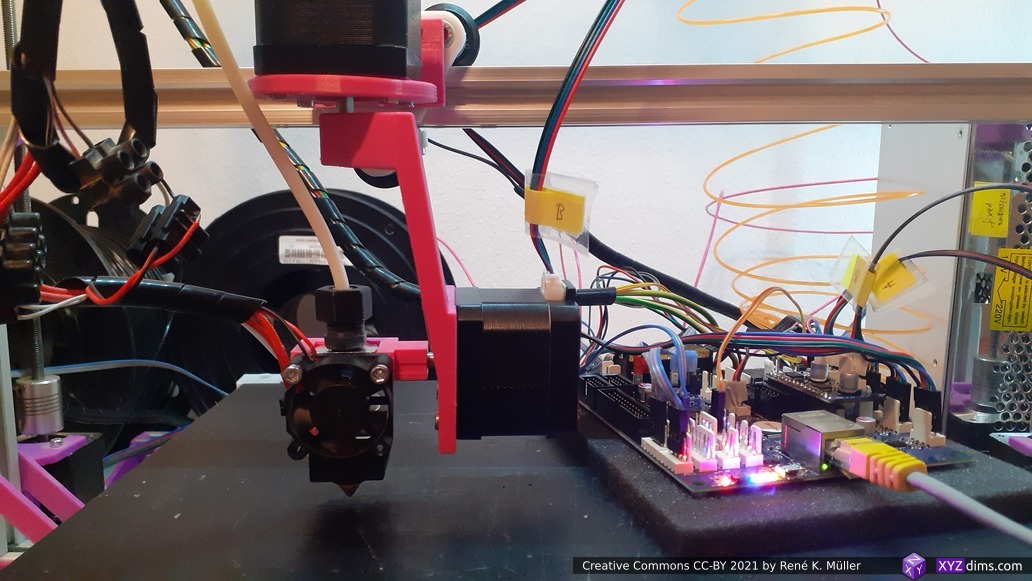
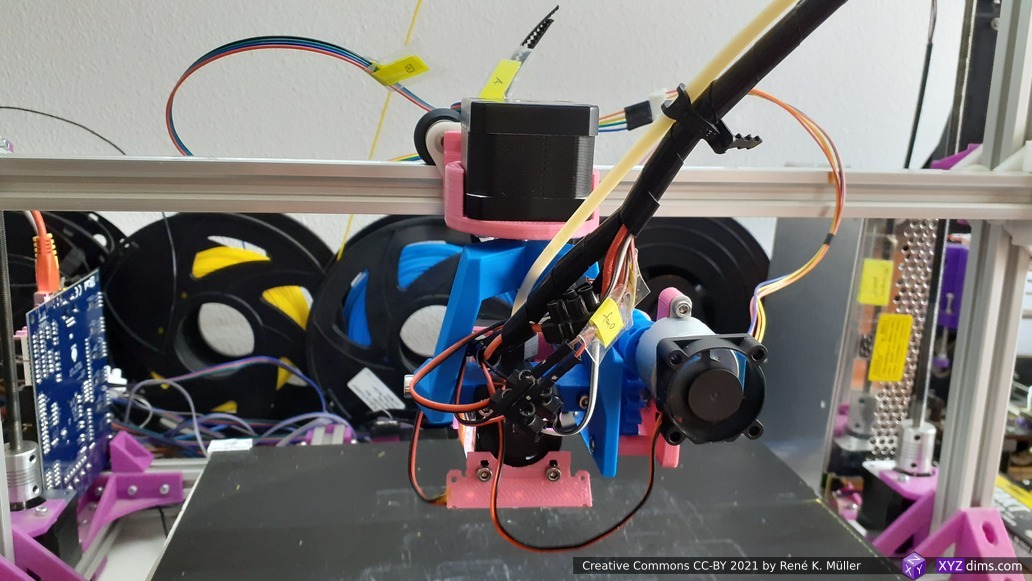
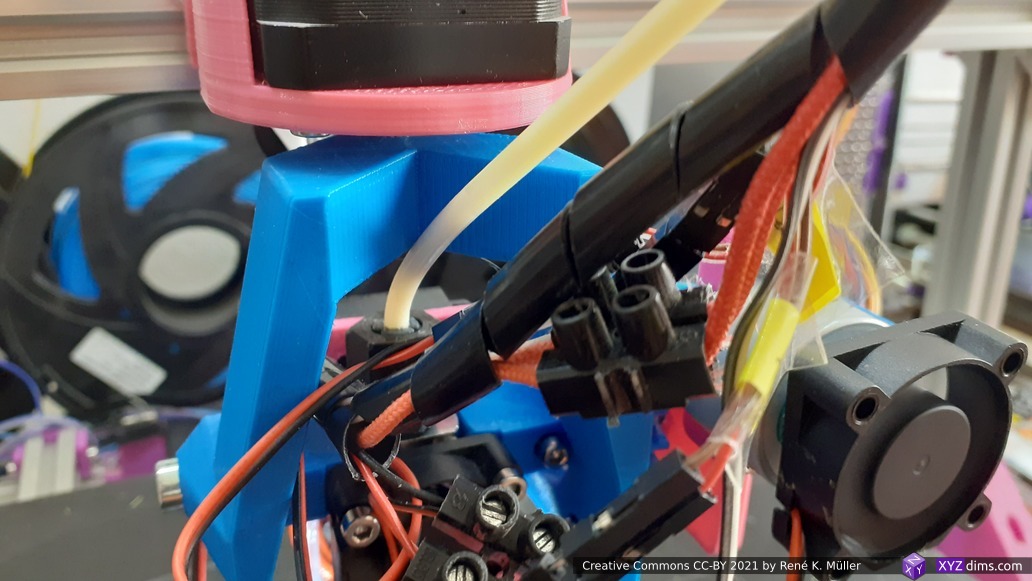
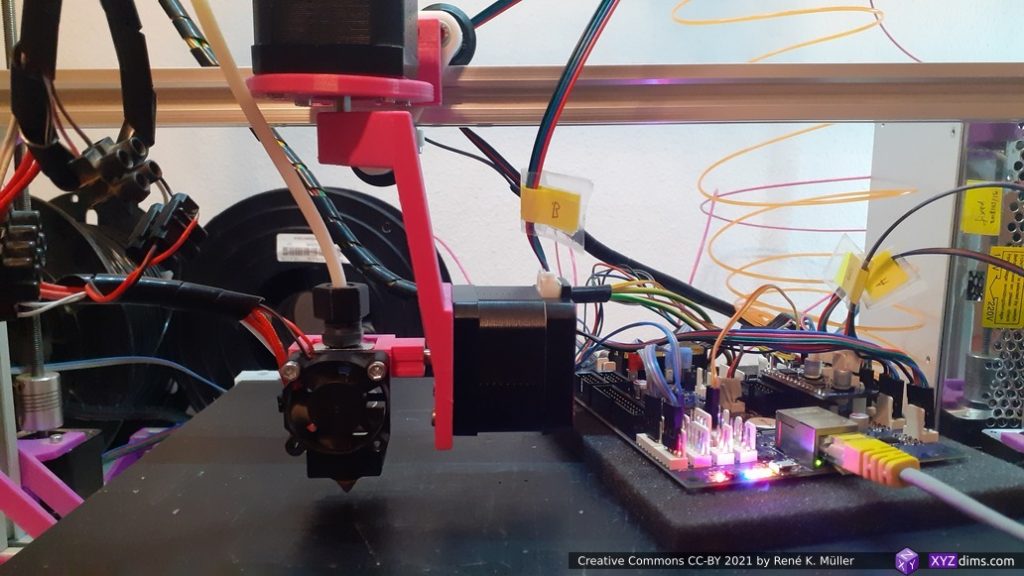
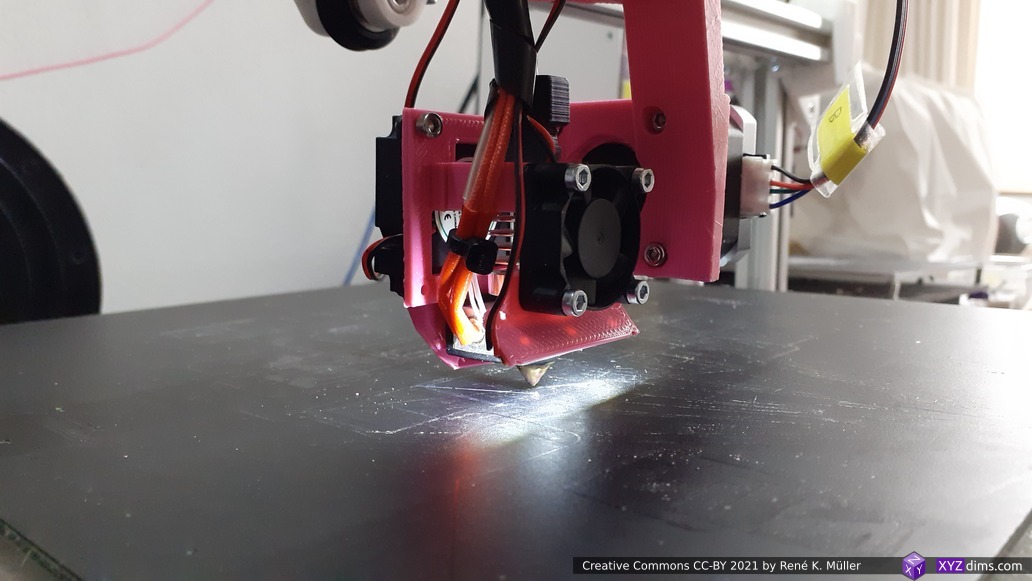
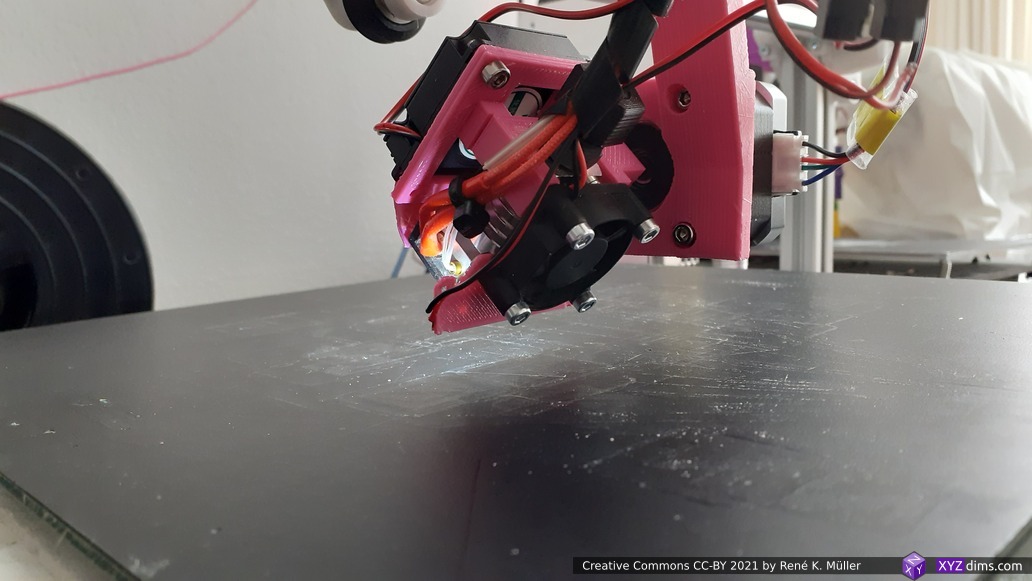
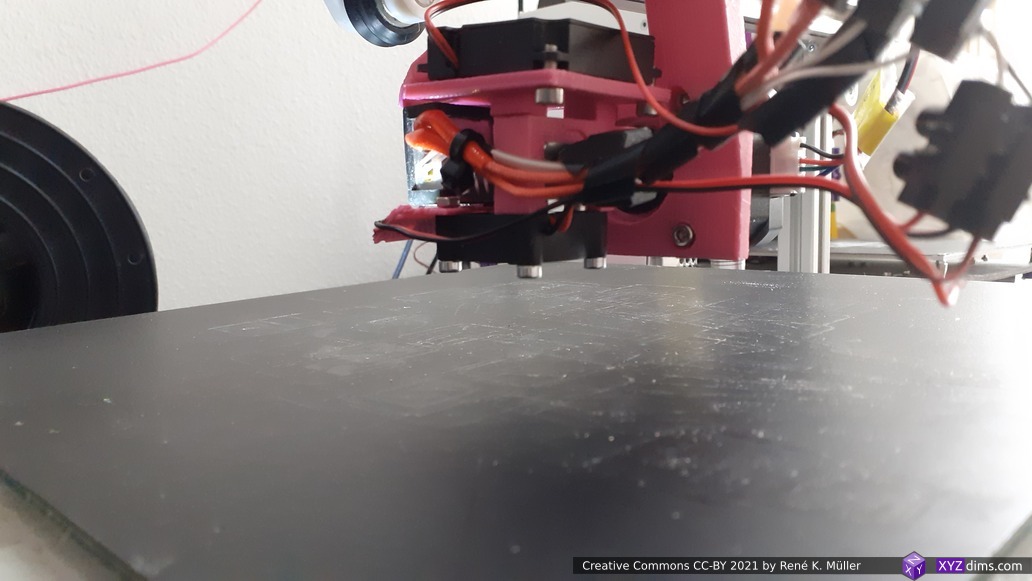
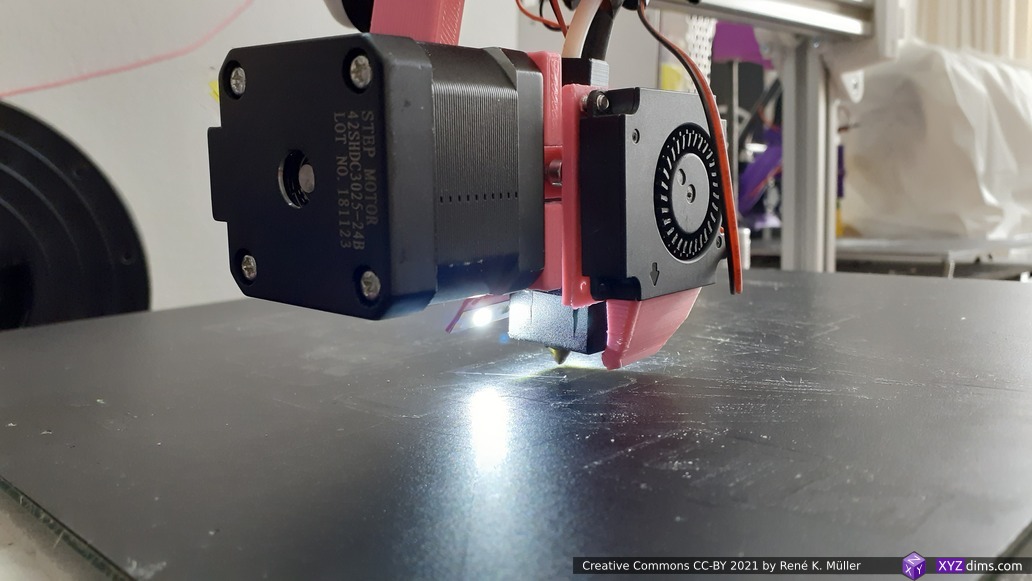
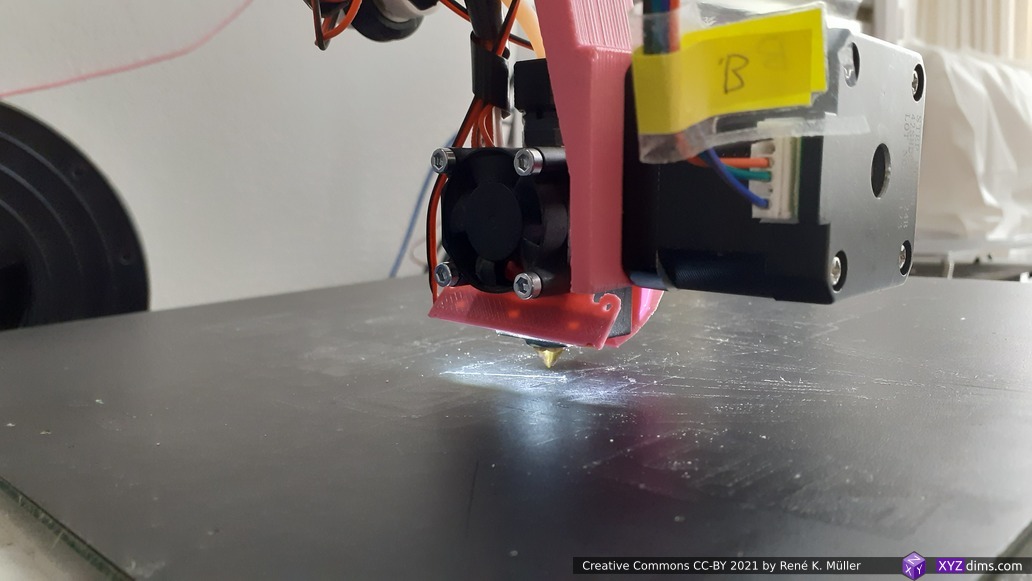
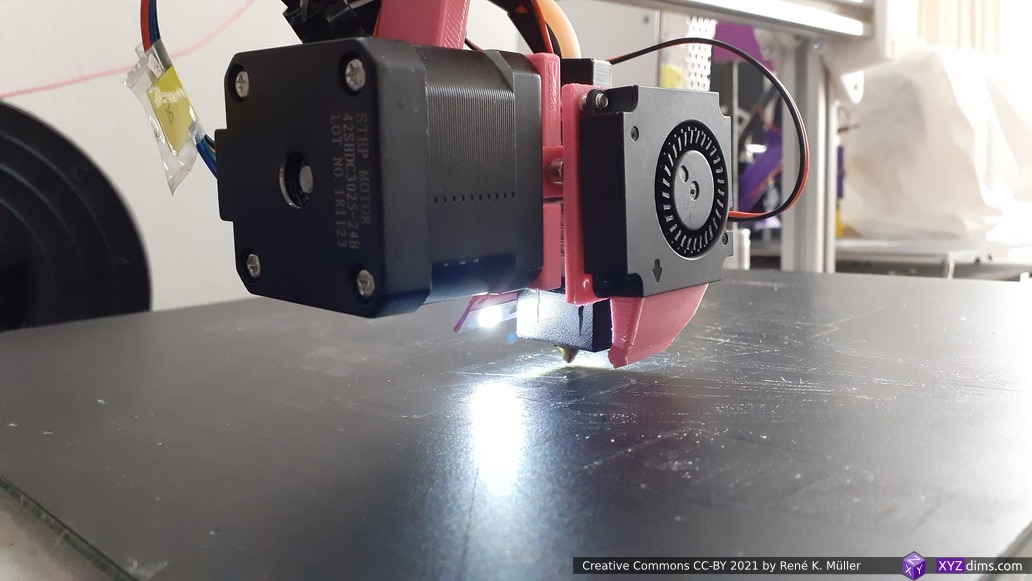
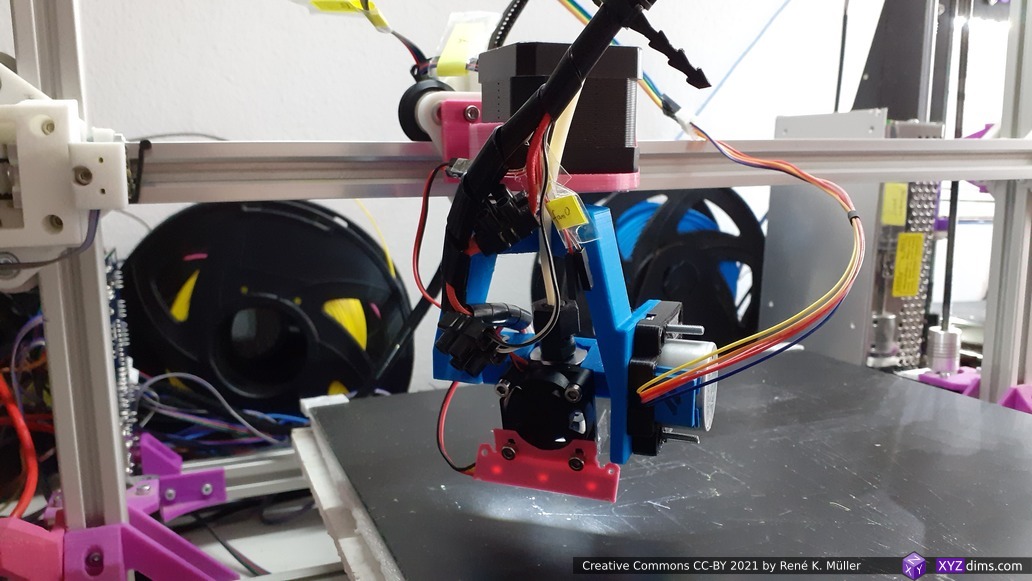
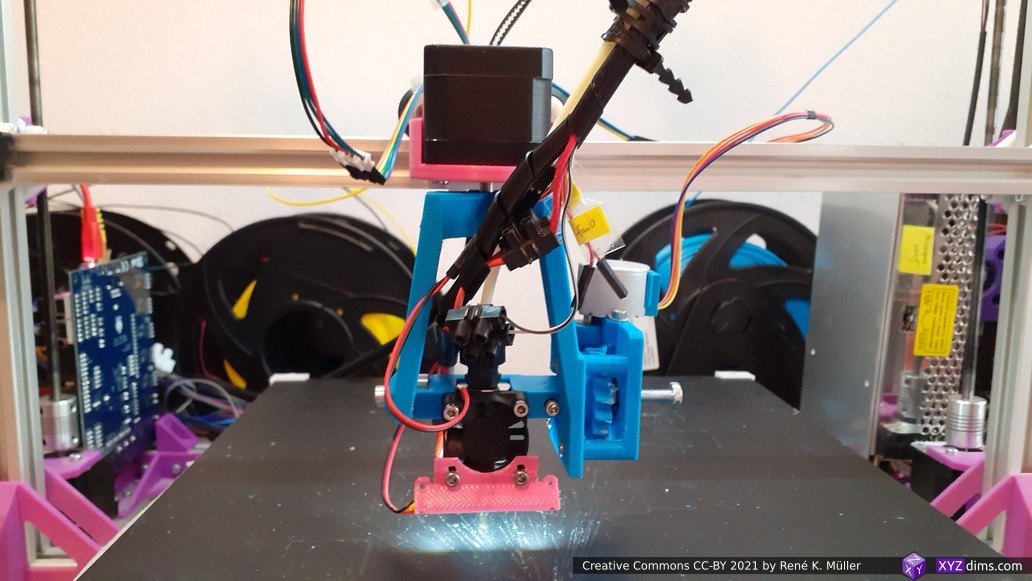
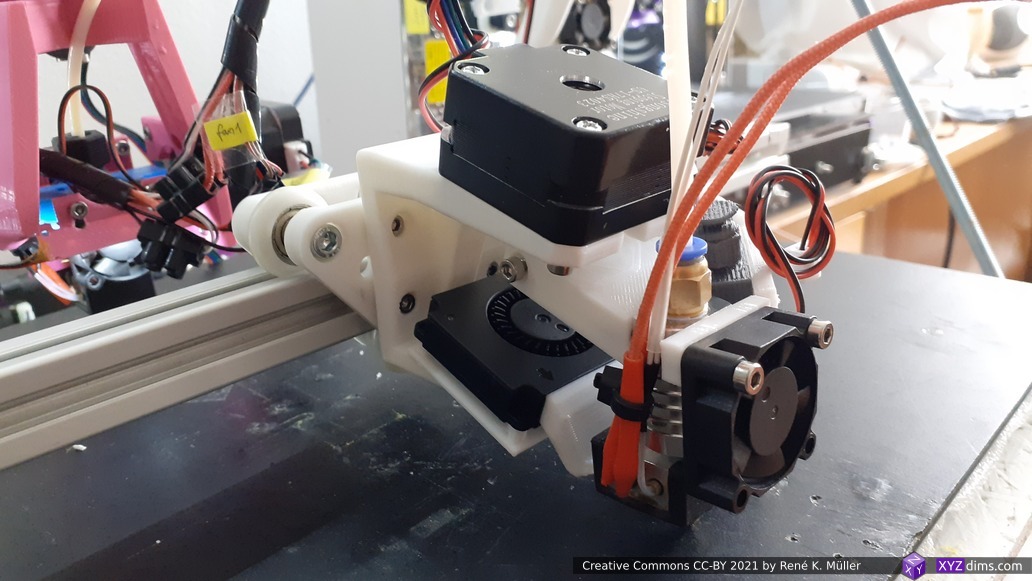
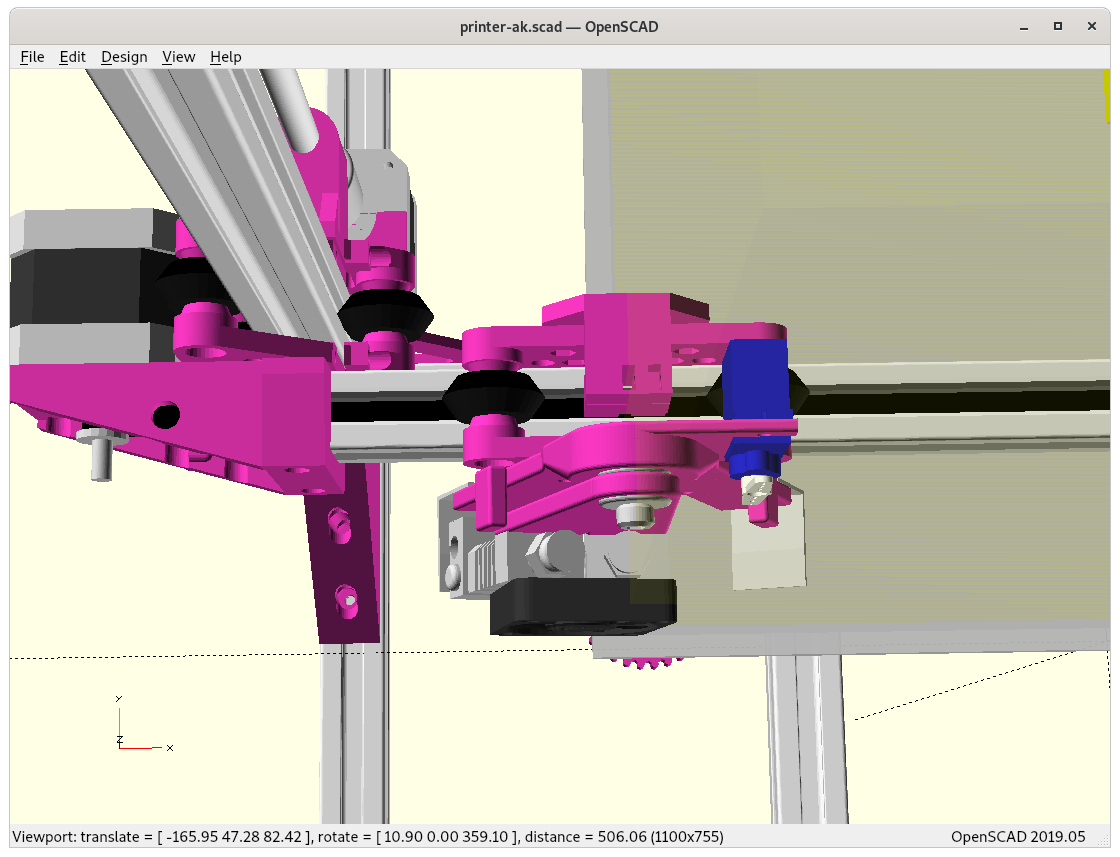
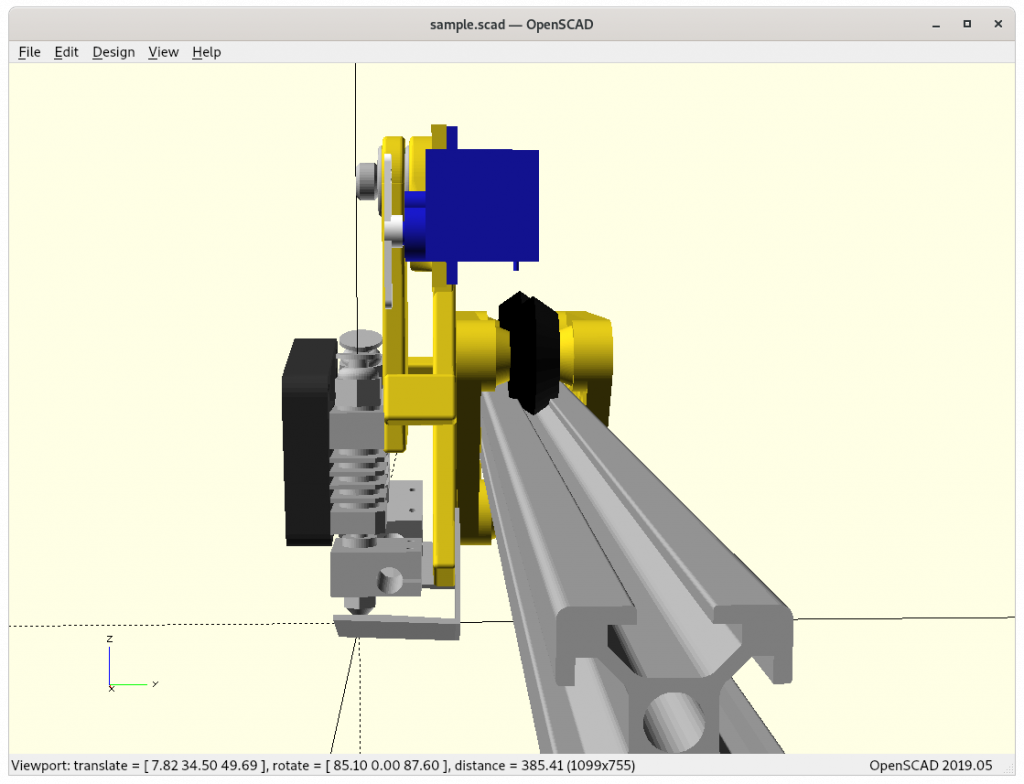
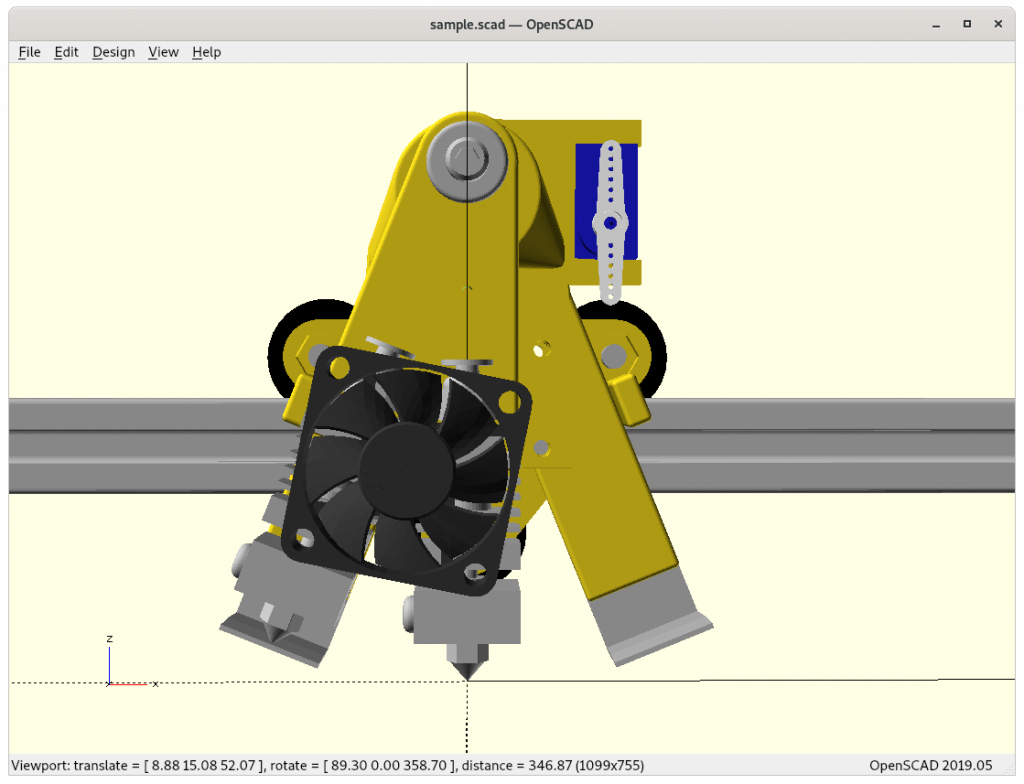
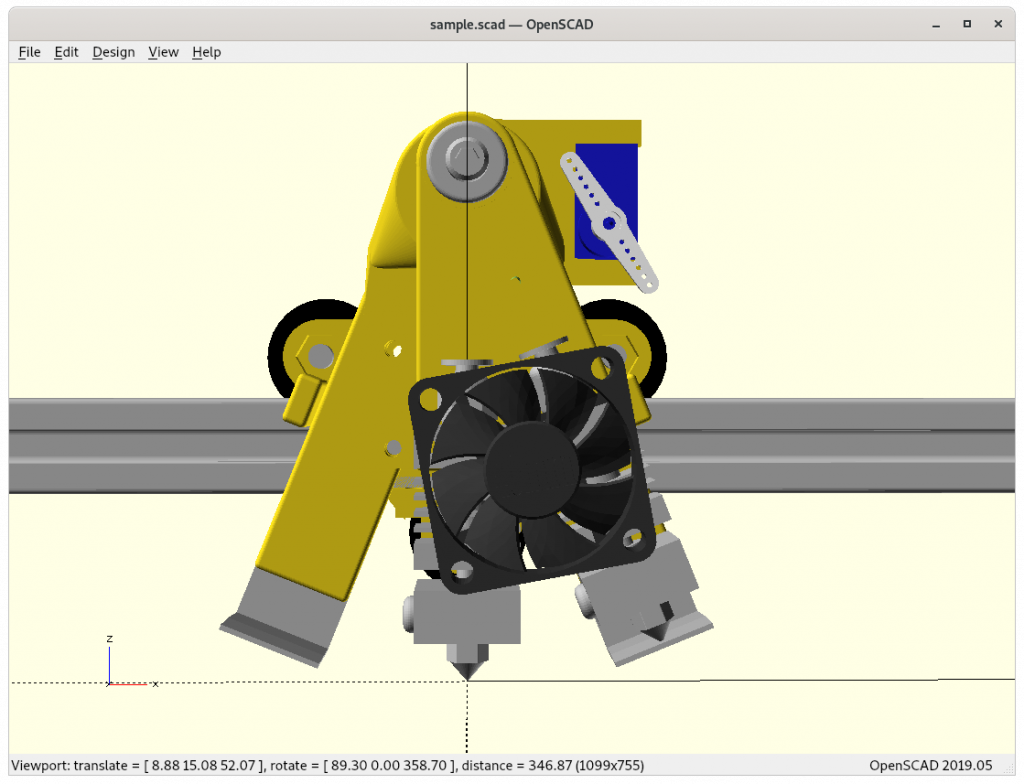
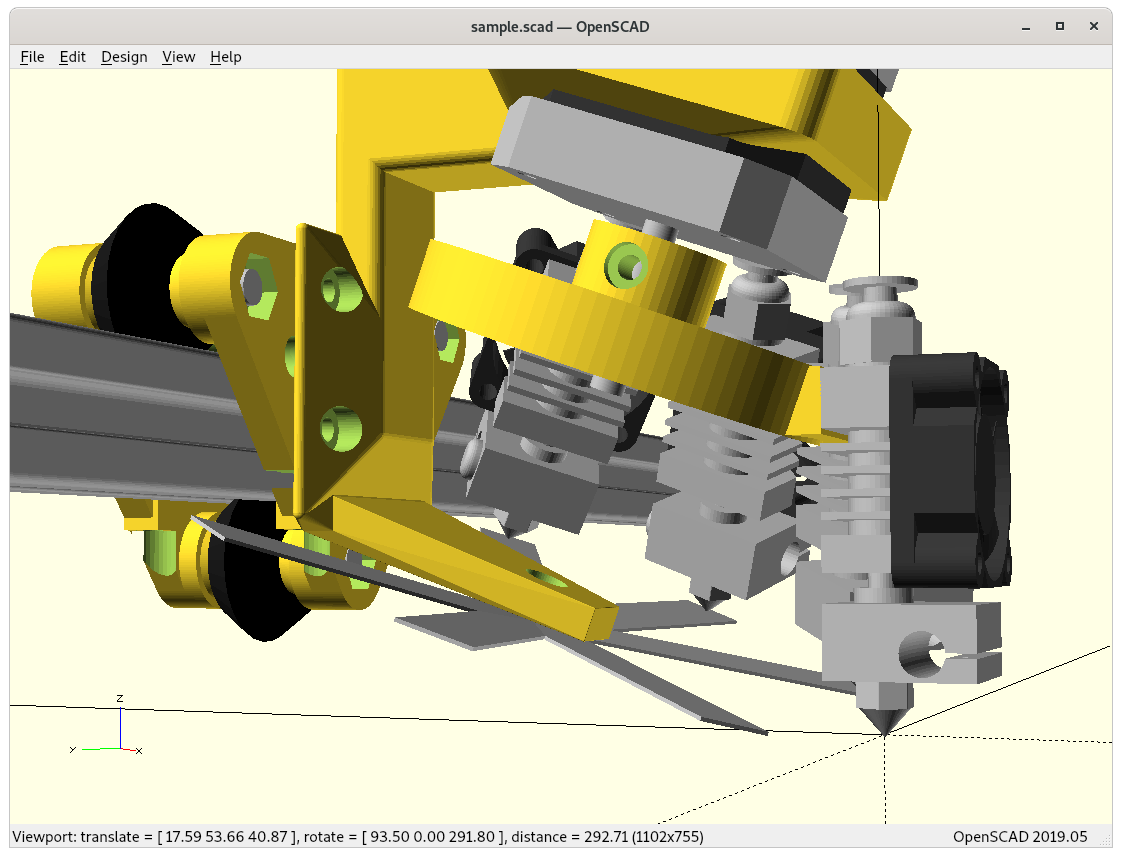
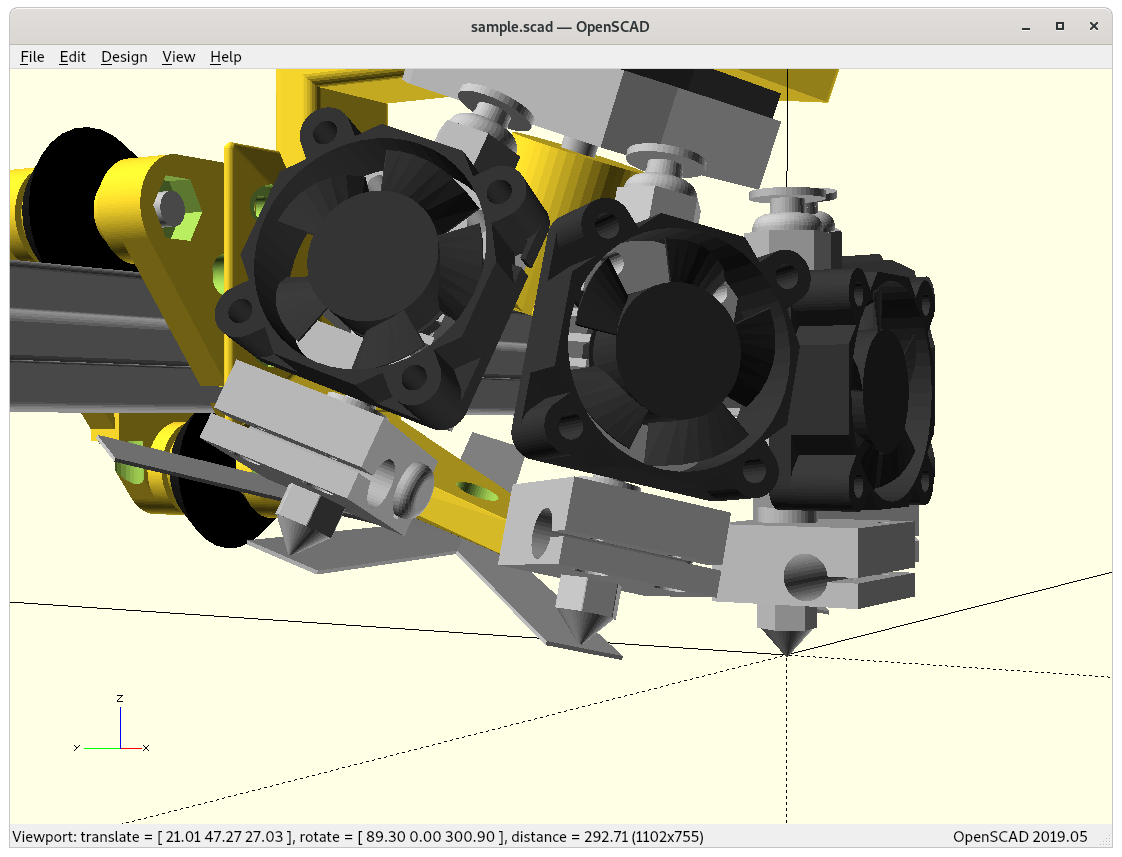
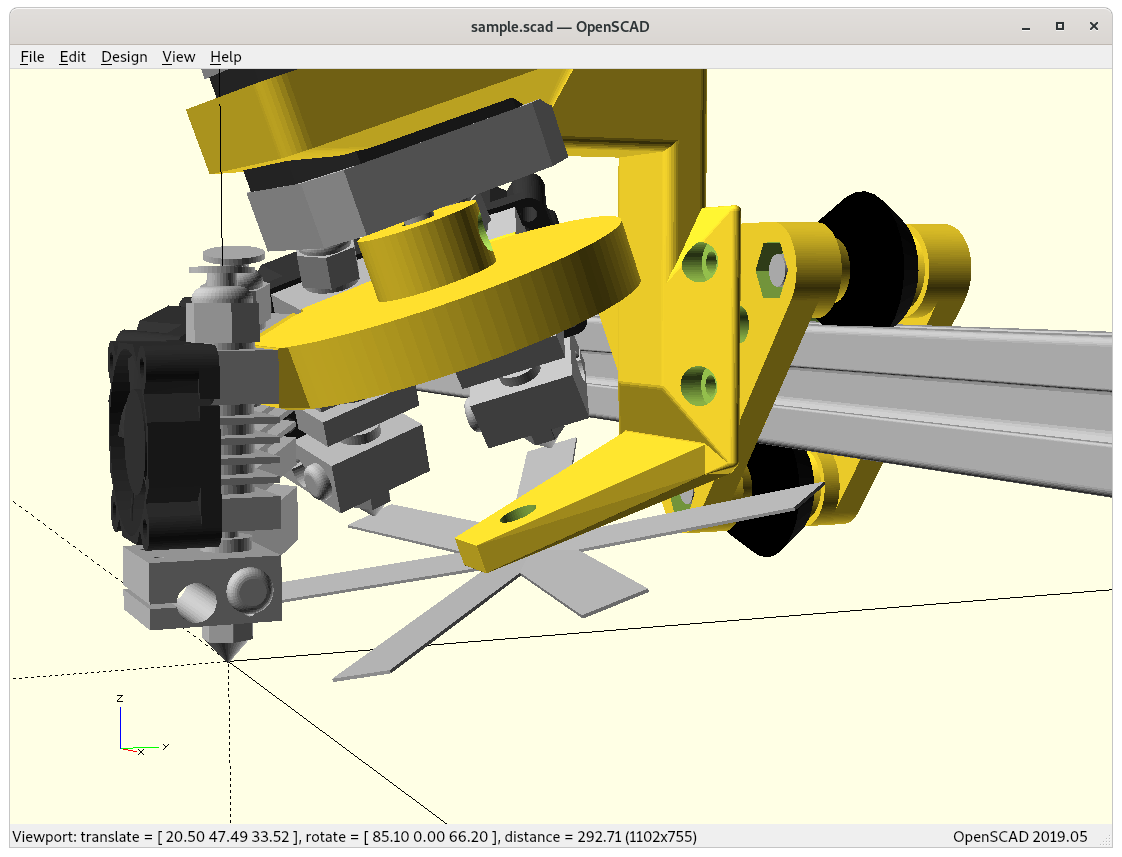
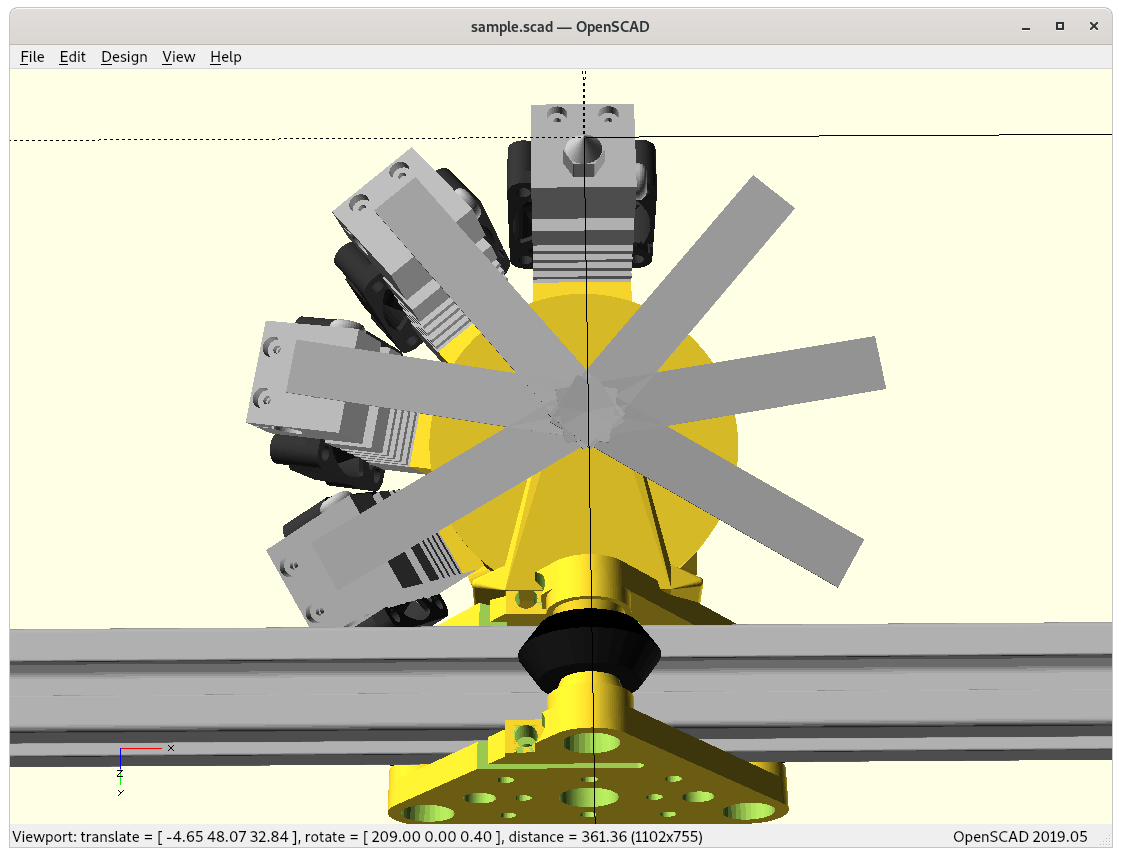
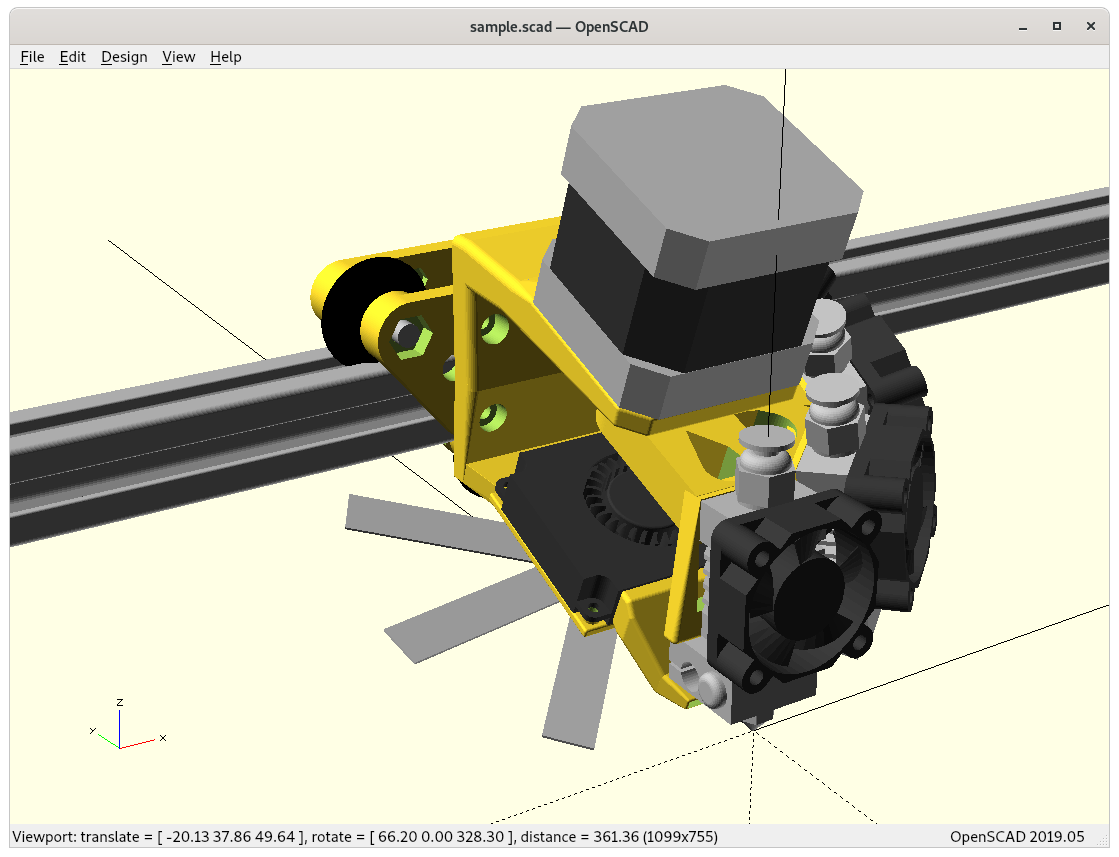
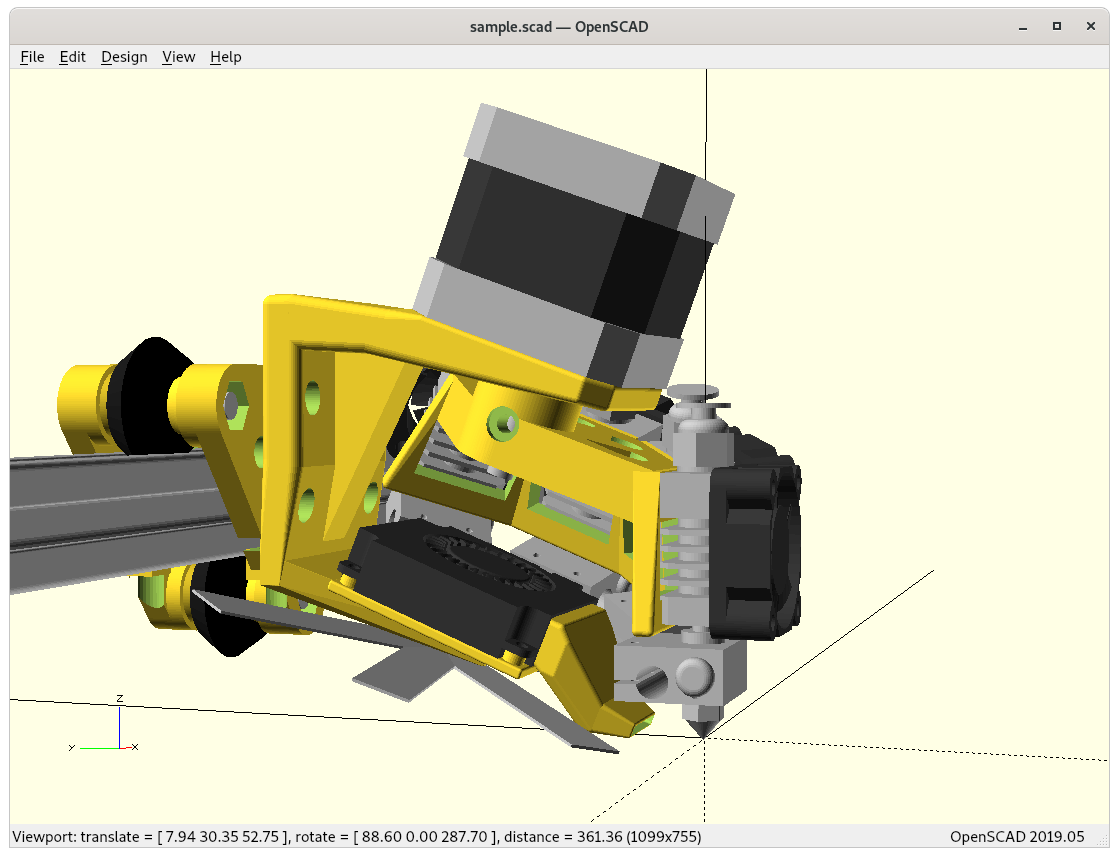
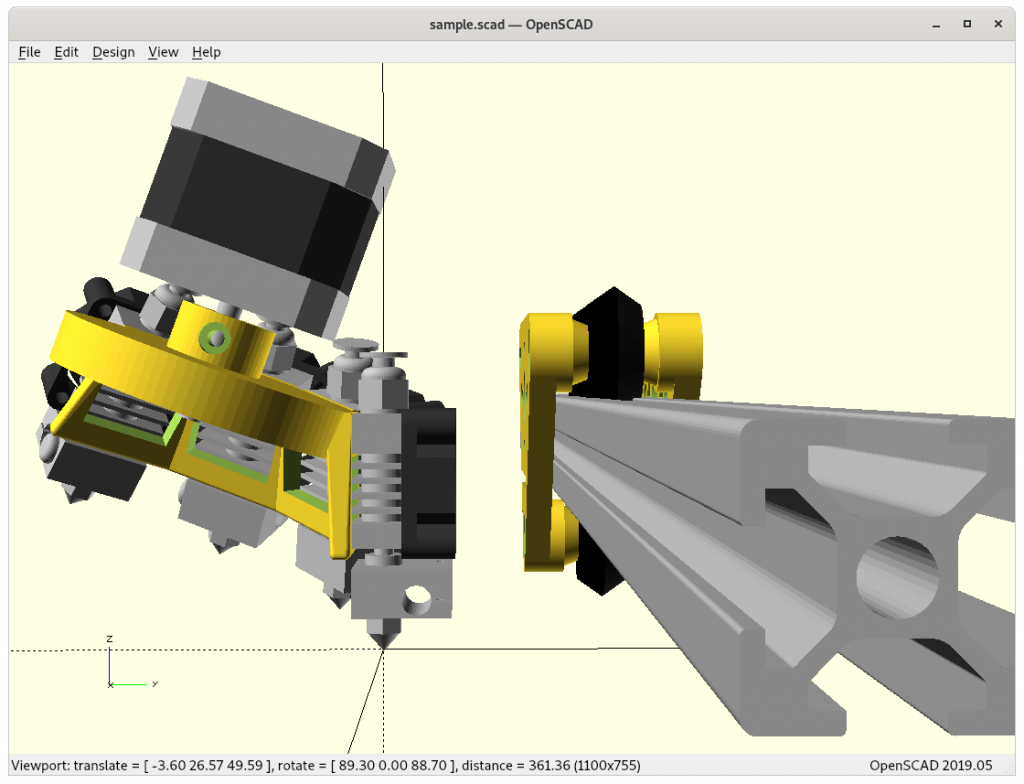
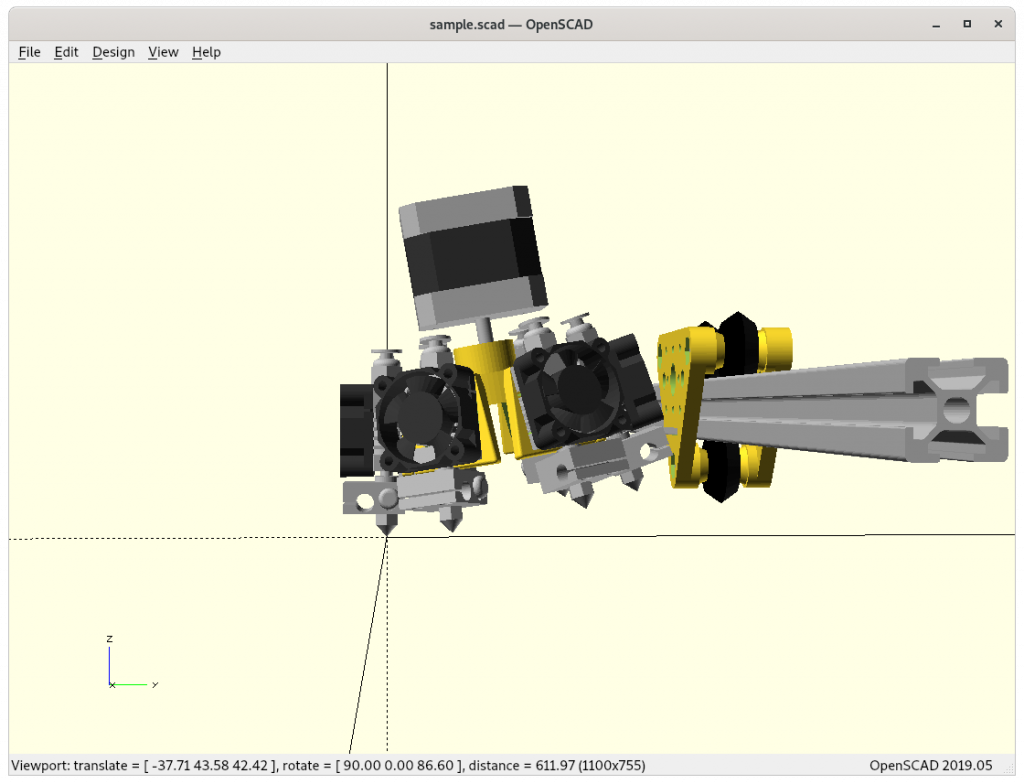
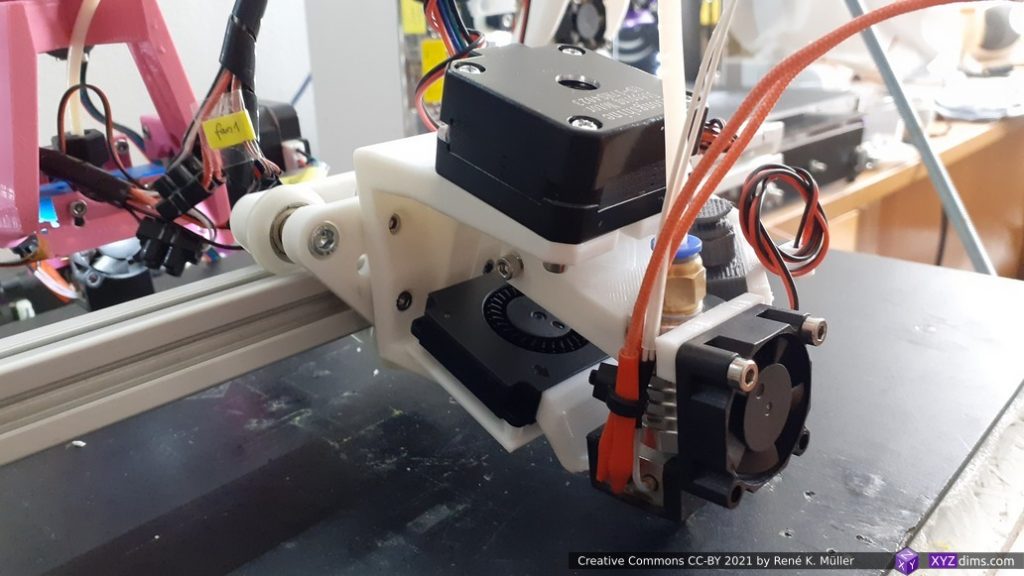
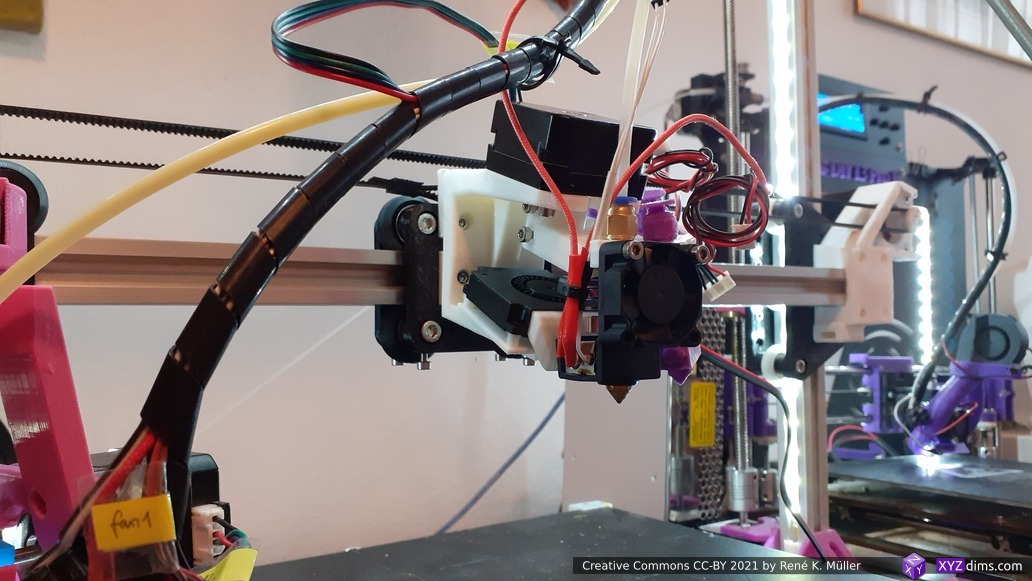
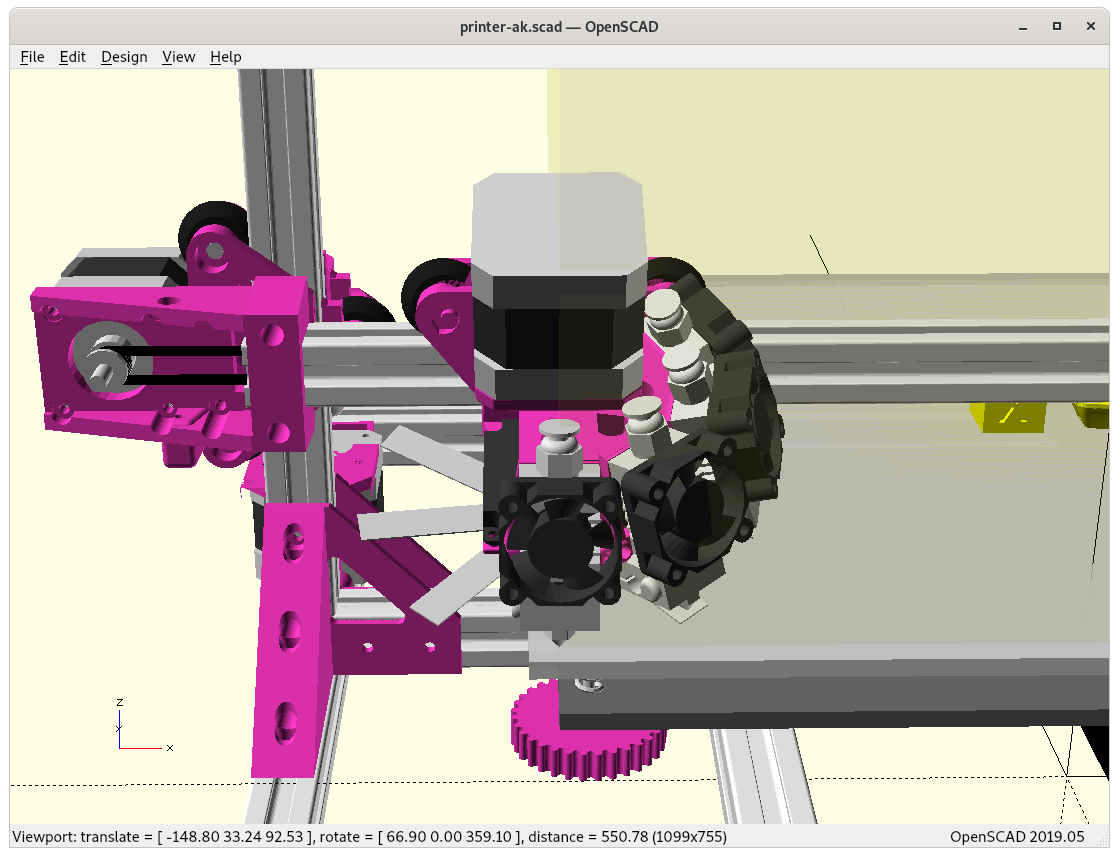
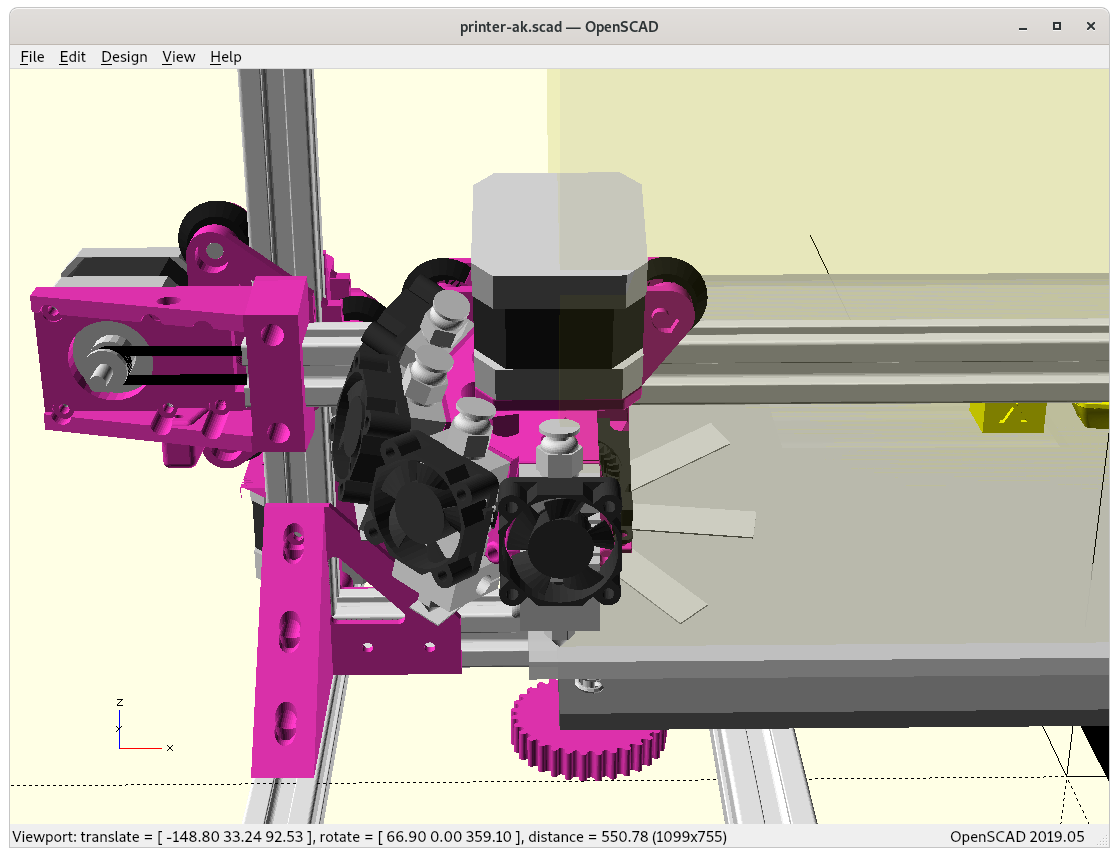
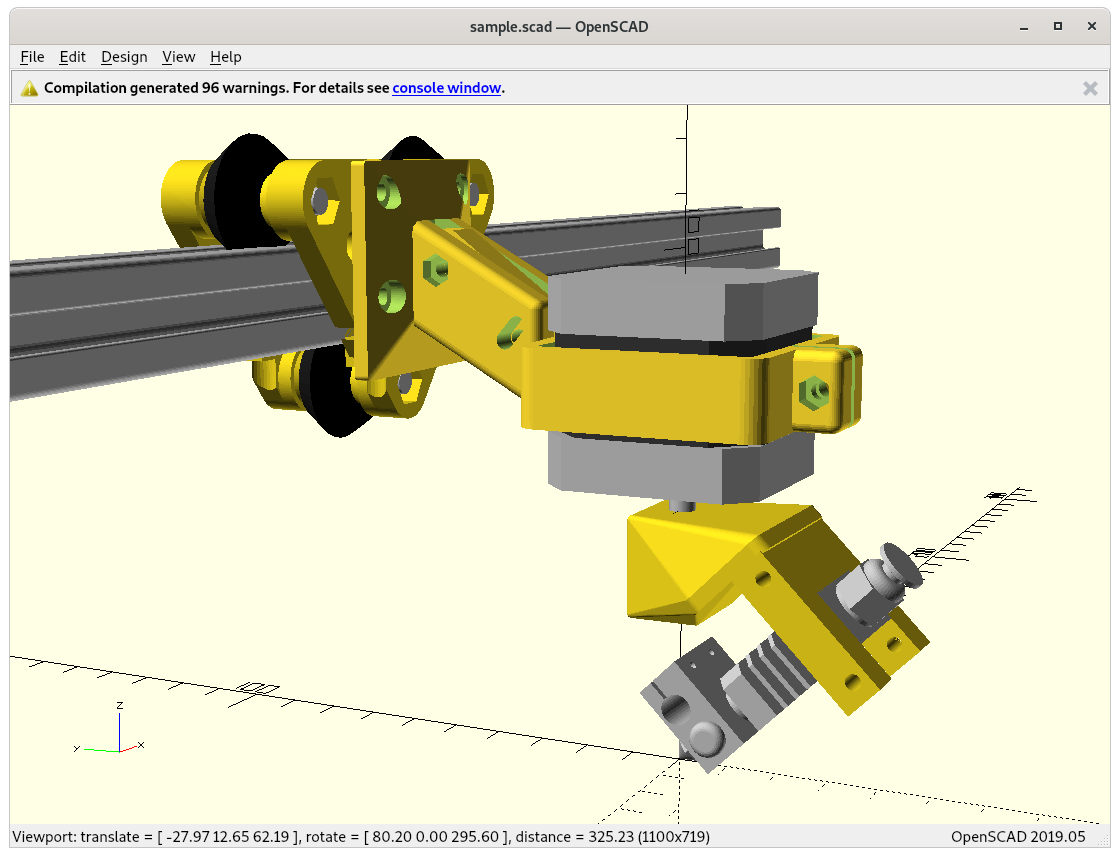
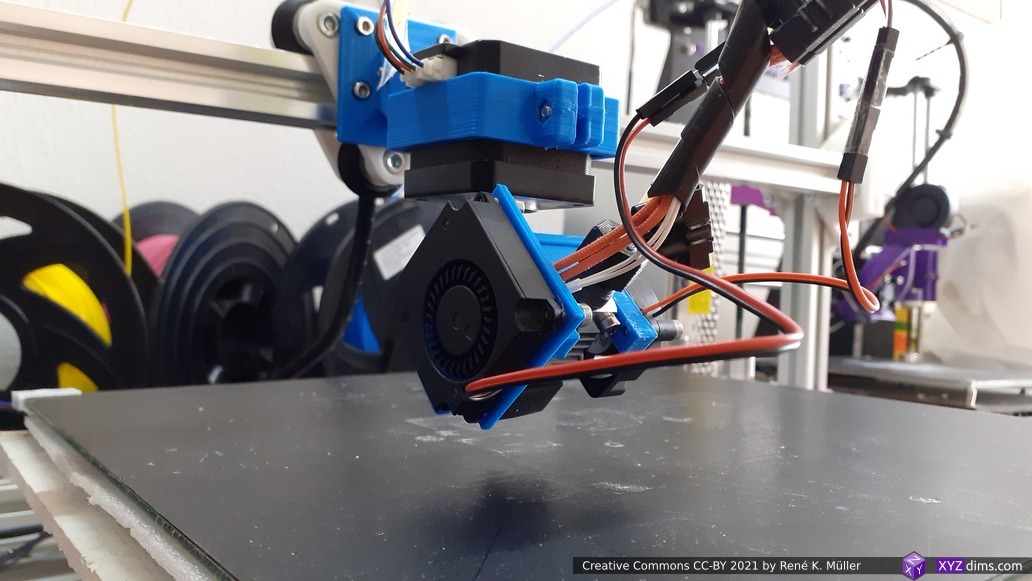
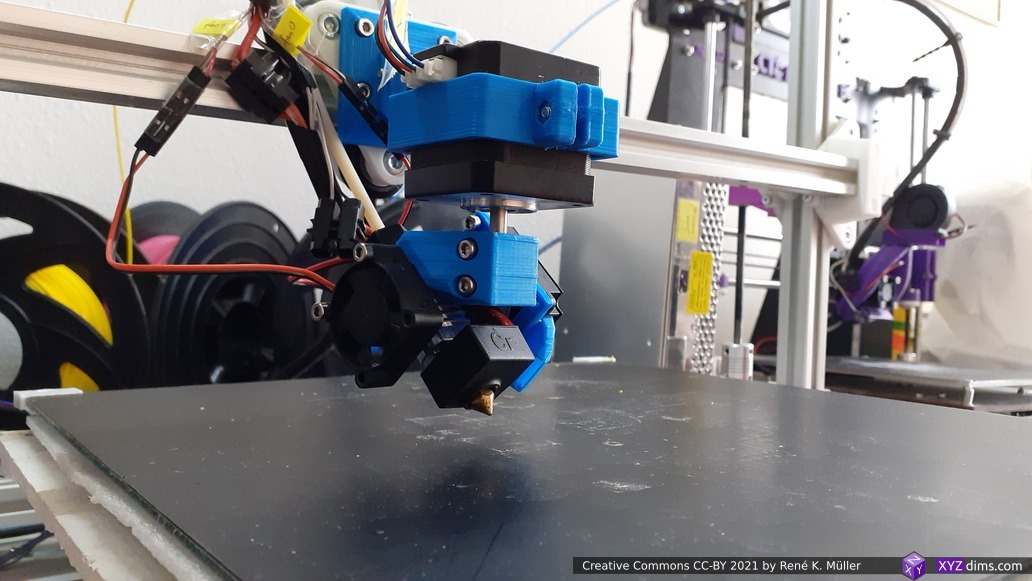
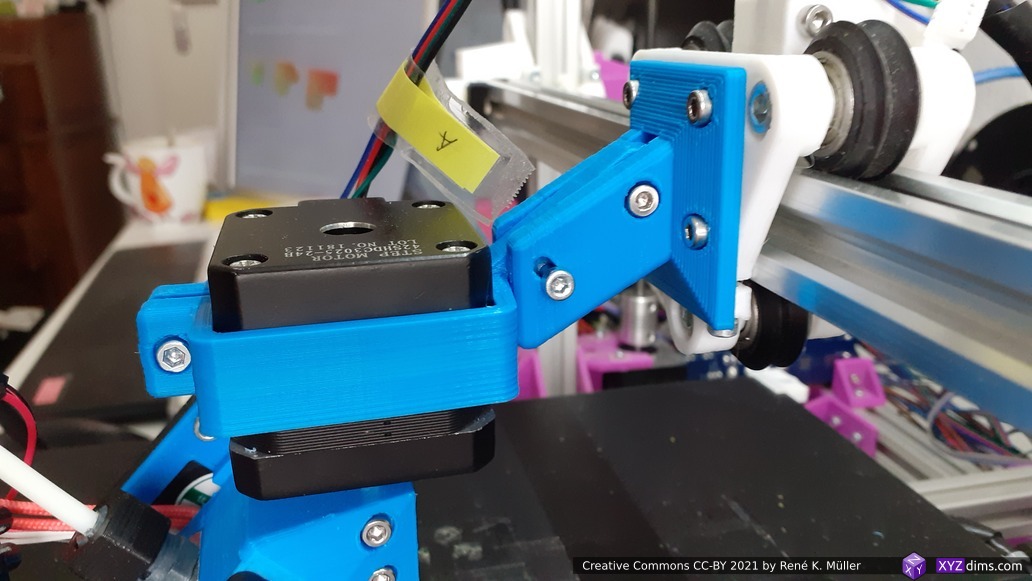
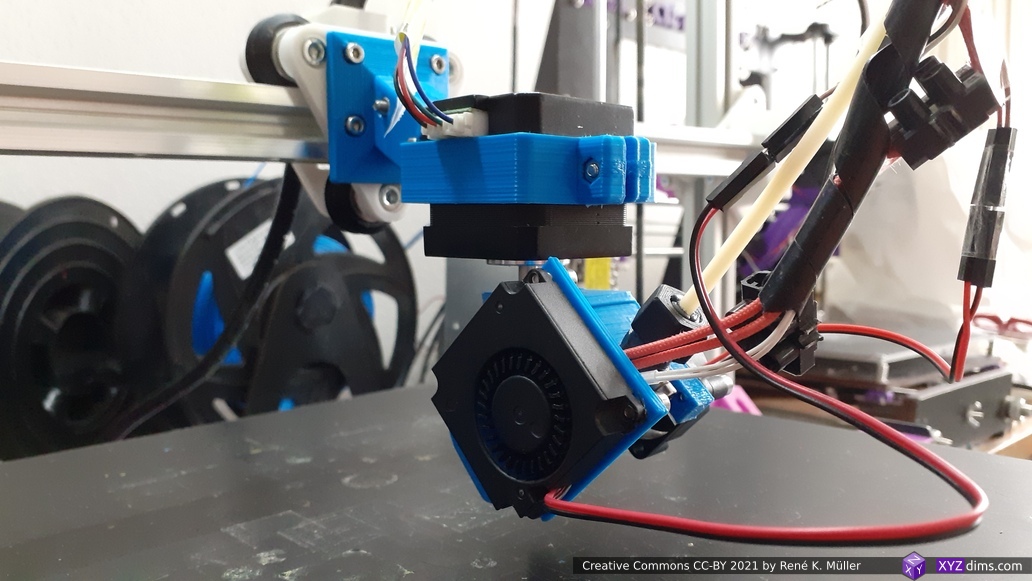
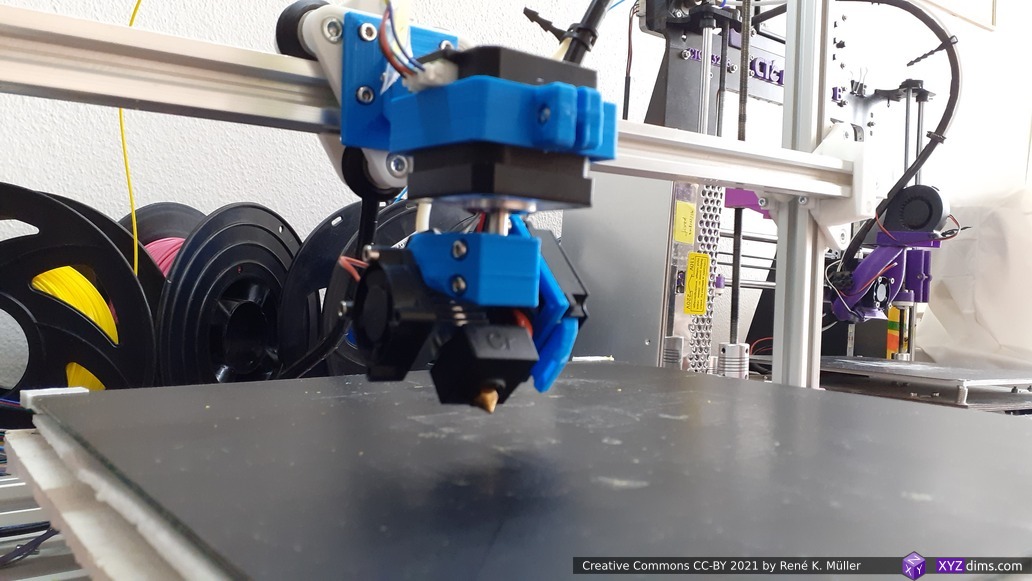
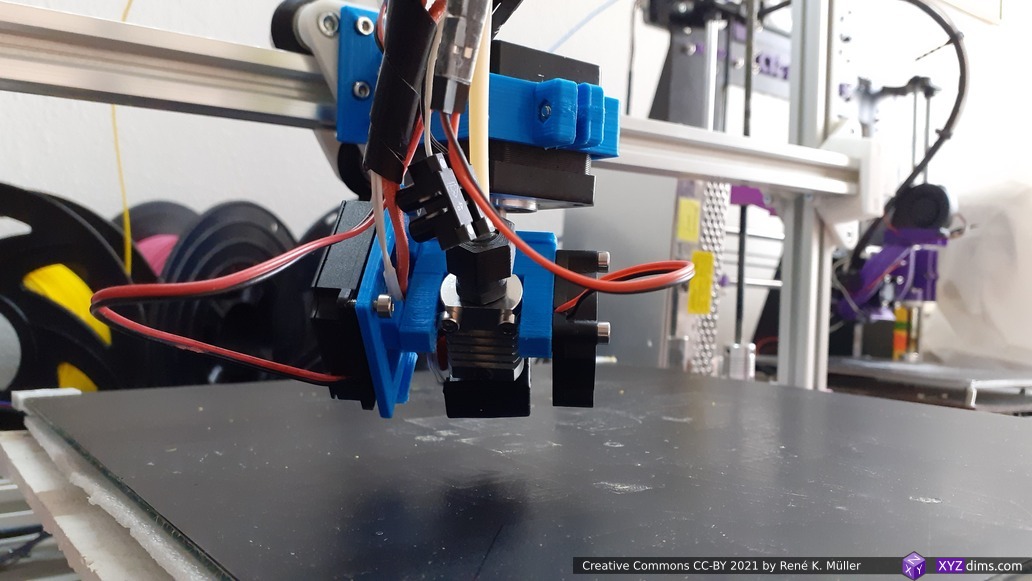
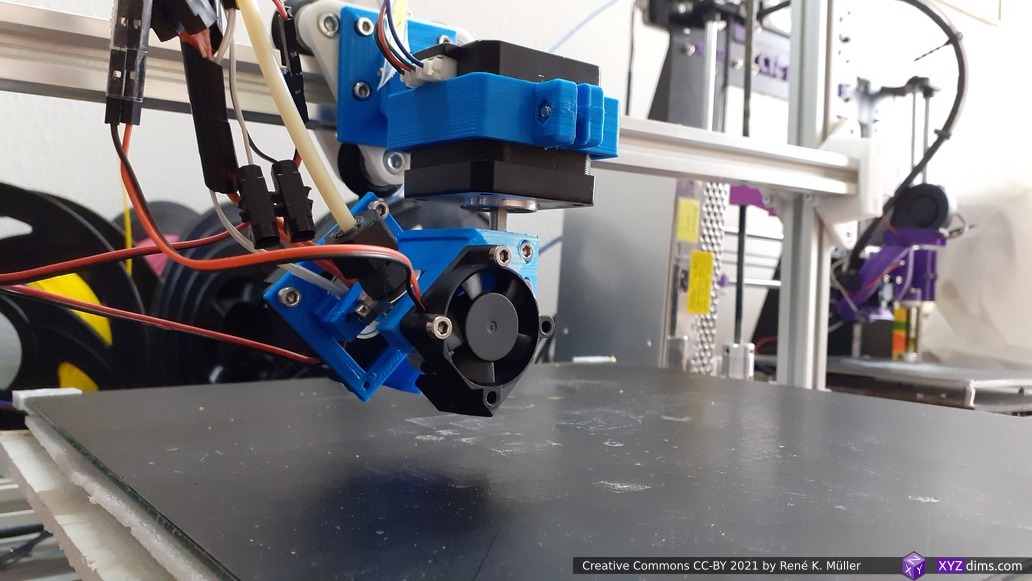
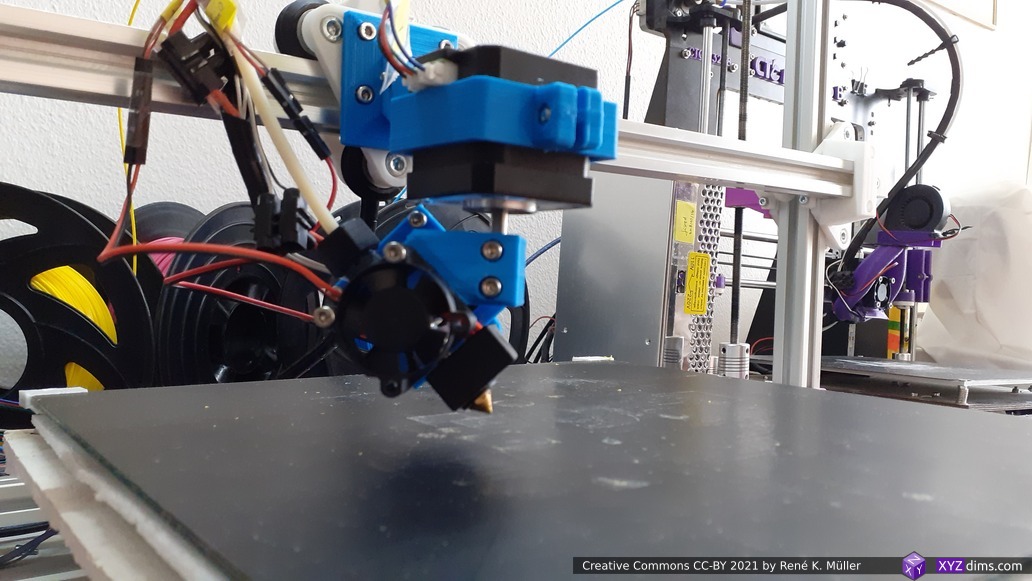
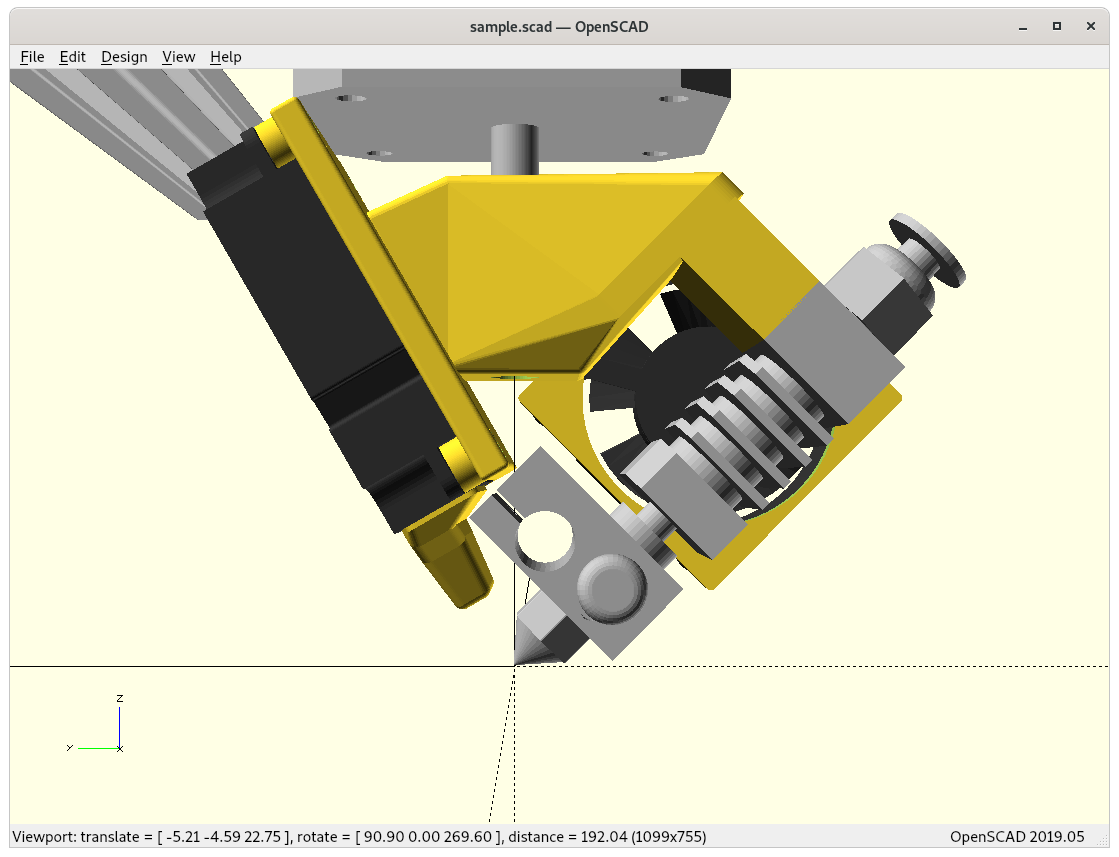
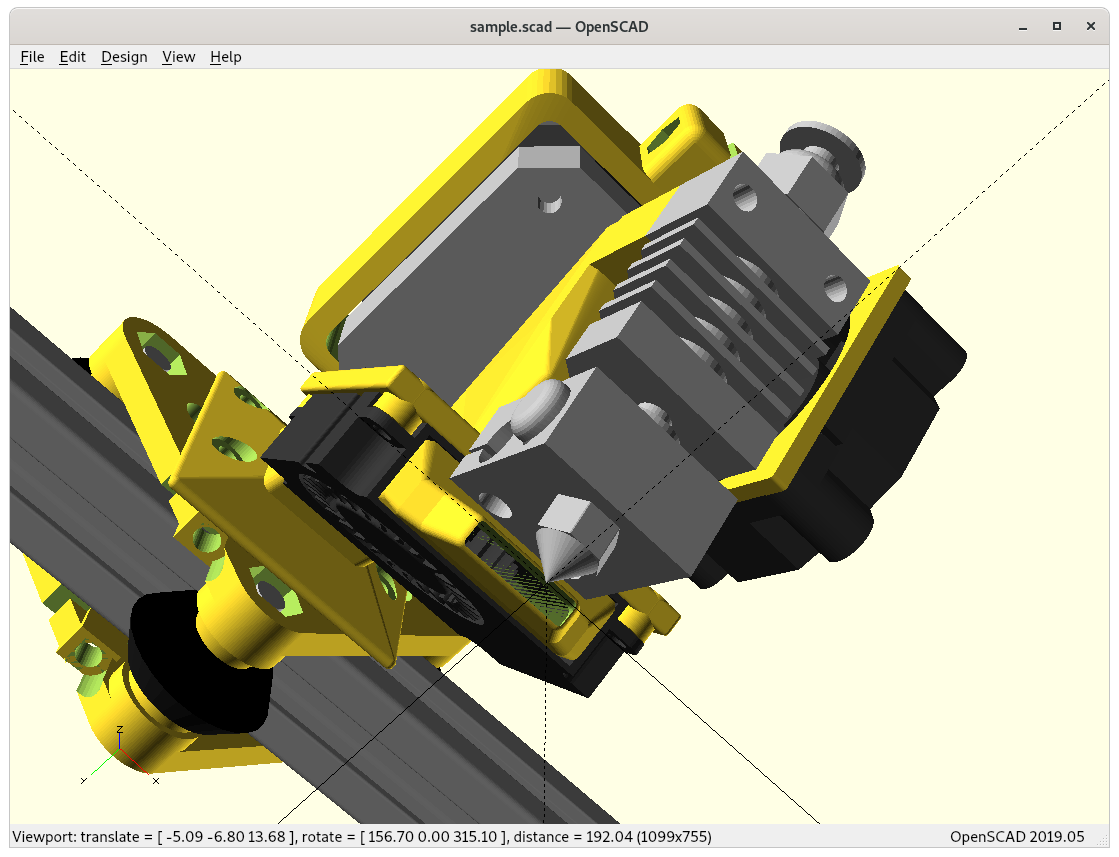
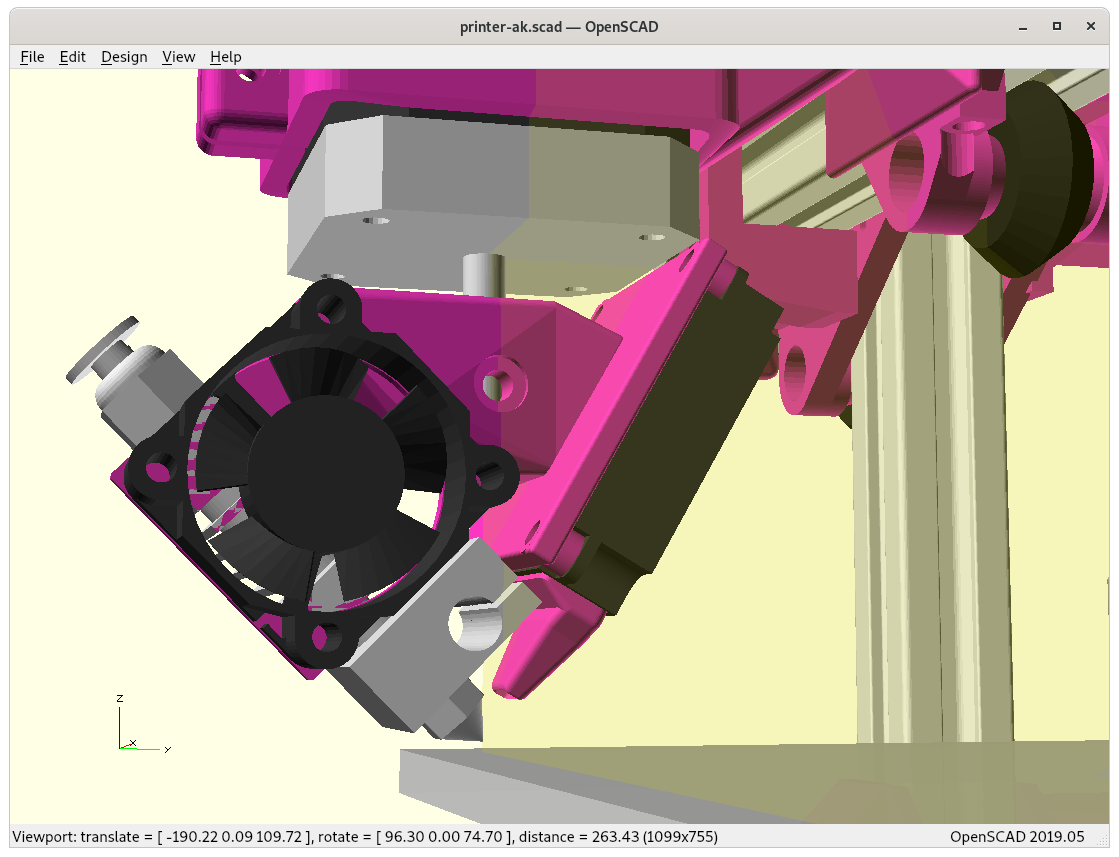
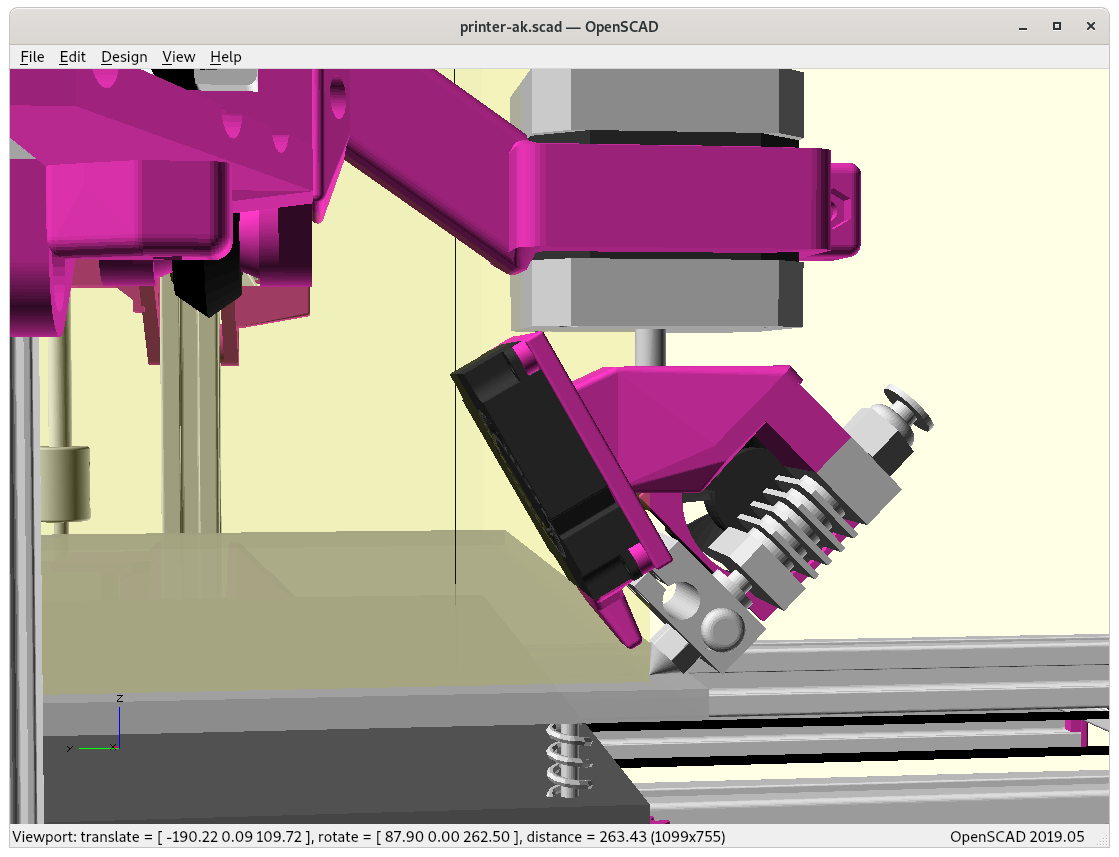
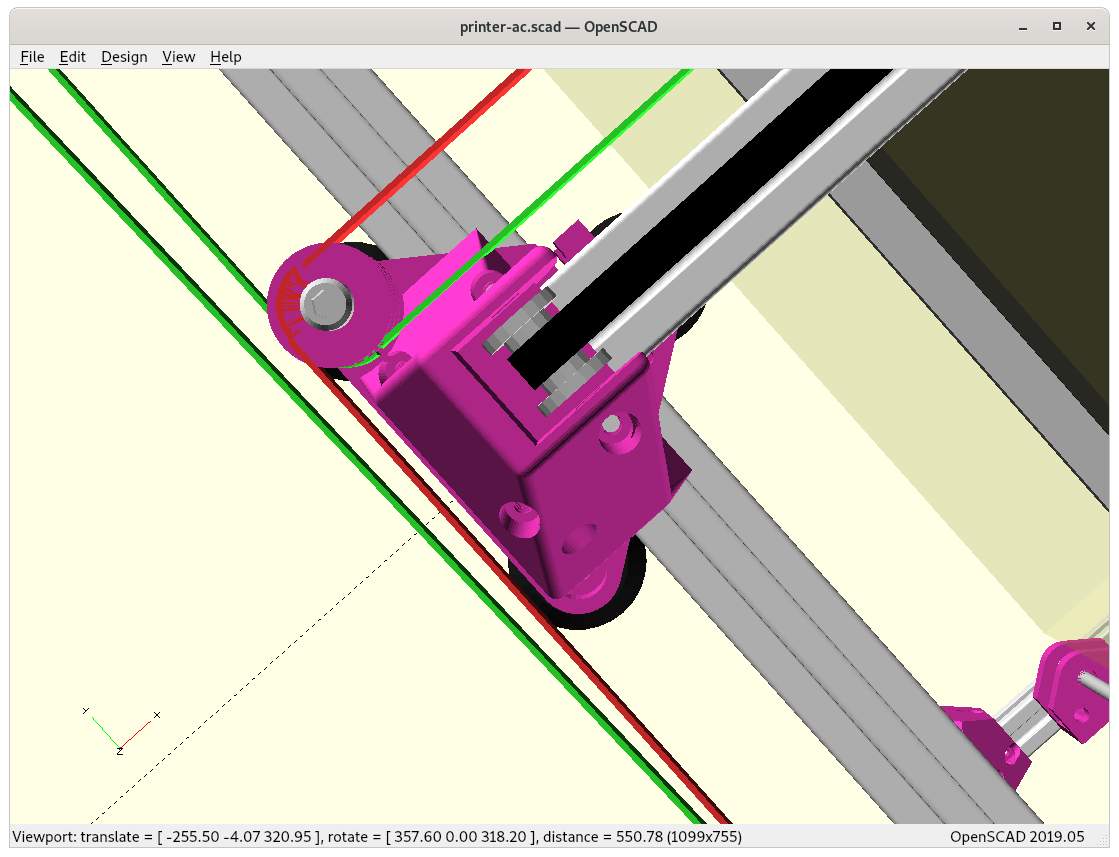
Eventually I took the time to print and assemble my Micro Swiss-based Rotating Tilted Nozzle (RTN):
RTN at default position Zrot=0°Zrot=45°Zrot=90°Zrot=135°Zrot=180°Zrot=-45°Zrot=-90°Zrot=-135°Zrot=-180°heatsink fan & shaft fastenersadjustable arm (to compensate tilt)
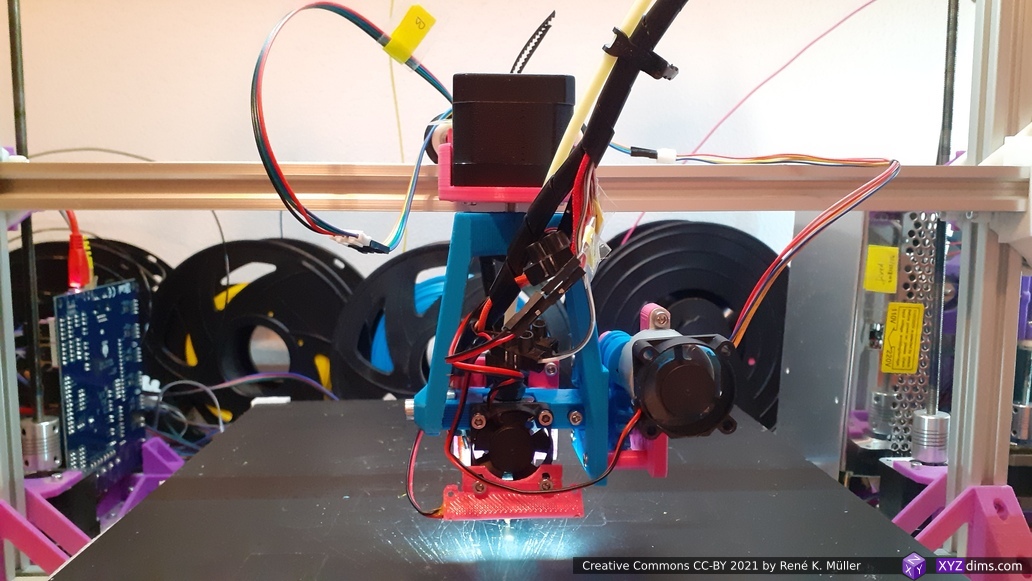
First test run revealed:
rotation 170°..180° and -170°..-180° were not reliable with NEMA 17 37mm as skipping steps due the stiffness of PTFE tube with filament – resolvement: increase arm length (away from X carriage down/forward)
partially resolved by limiting A to -170°..170°: M208 A-170 S1 and M208 A170 S0 in config.g of Duet 3 Mini 5+ setup
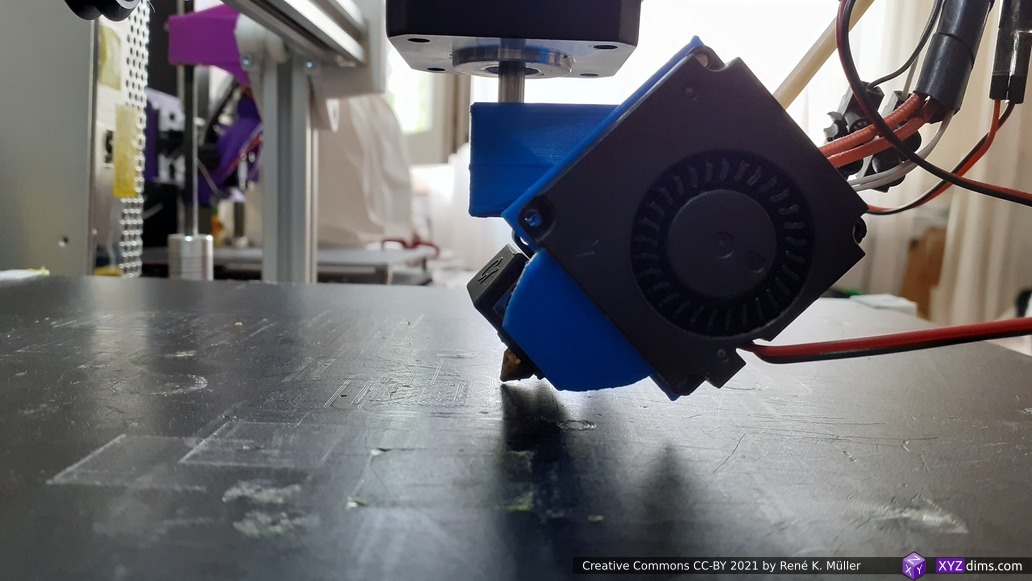
micro swiss / CR 10 hotend heatblock socket touches the bed (same height as nozzle), fixed due slight tilt from X carriage due weight, newer design allows angle readjustment
single rotation requires refinement by the Slicer4RTN, addressed partially with Slicer4RTN 0.6.0, might require more fine-tuning.
I’m focusing on the hardware-side on the Penta Axis (PAX) 5-Axis printhead and transfer some of the experiences back into the RTN design.
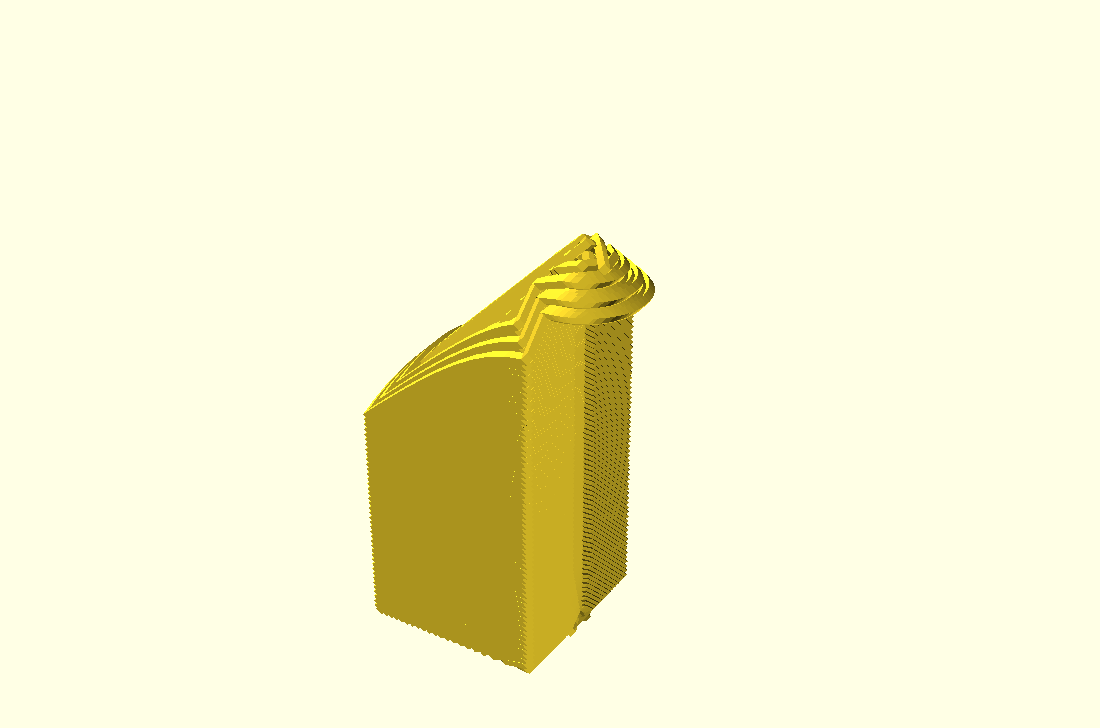
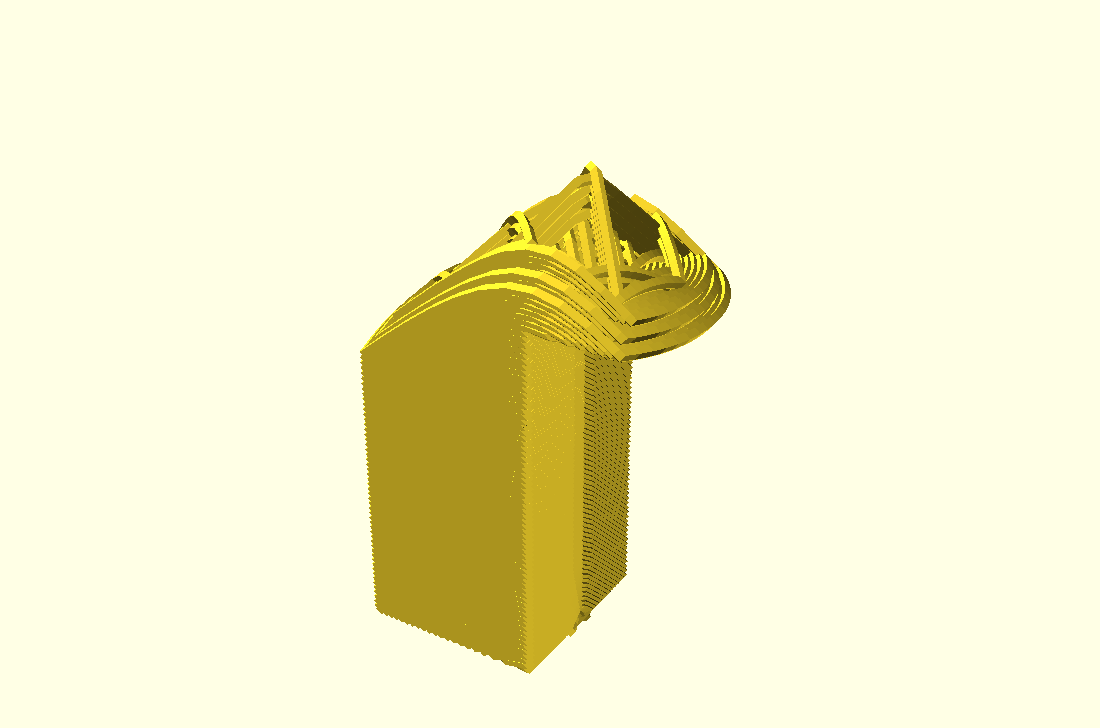
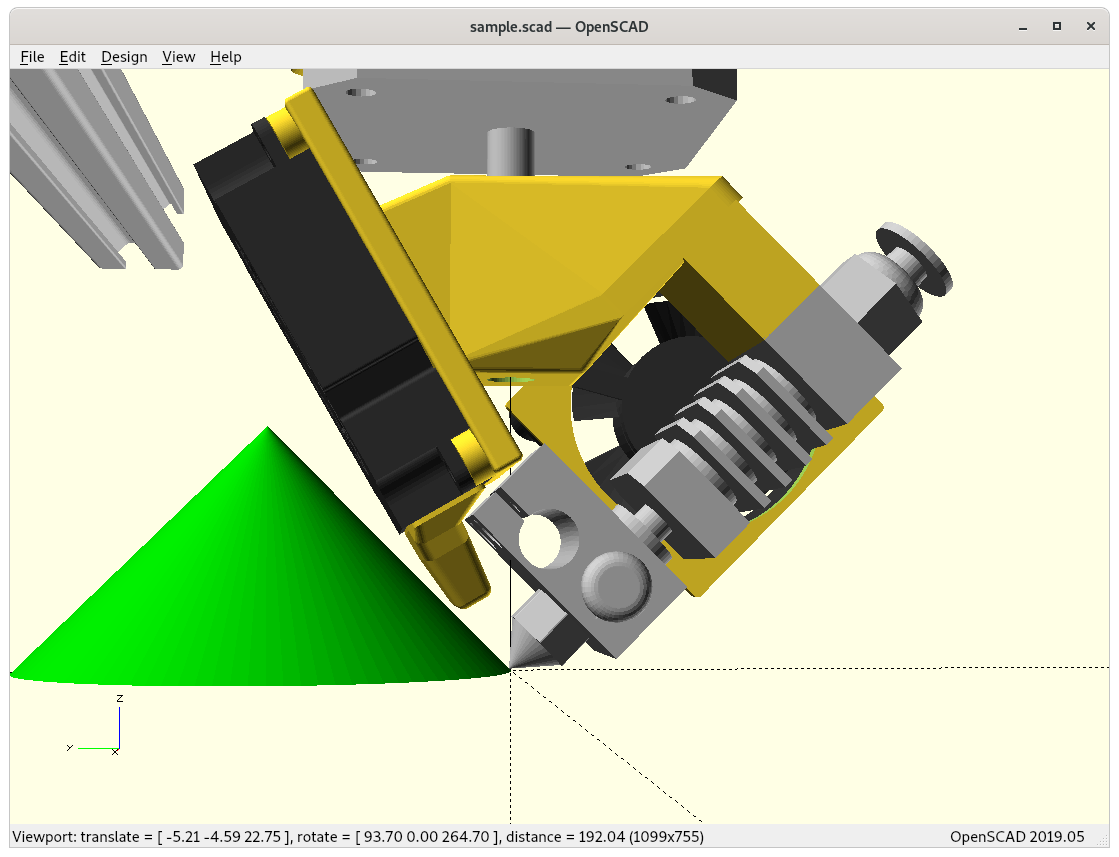
Slicing for Rotating Tilted Nozzle: Conic Slicing
I had to visualize the novel conic slicing approach as mentioned in the article and in the video:
Rotating Tilted Nozzle: Outside Cone – tilted print plane with Z axis rotating leads to conic print planeRotating Tilted Nozzle: Inside Cone – tilted print plane with Z axis rotating leads to conic print plane
f(Z rot, C height, R) ⟹ X, Y, Z
X = sin(Z rot) * R Y = -cos(Z rot) * R Z = C height / sqrt(2)
Z rot = atan2( -Y, X ) R = sqrt( X*X + Y*Y ) C height = Z * sqrt(2)
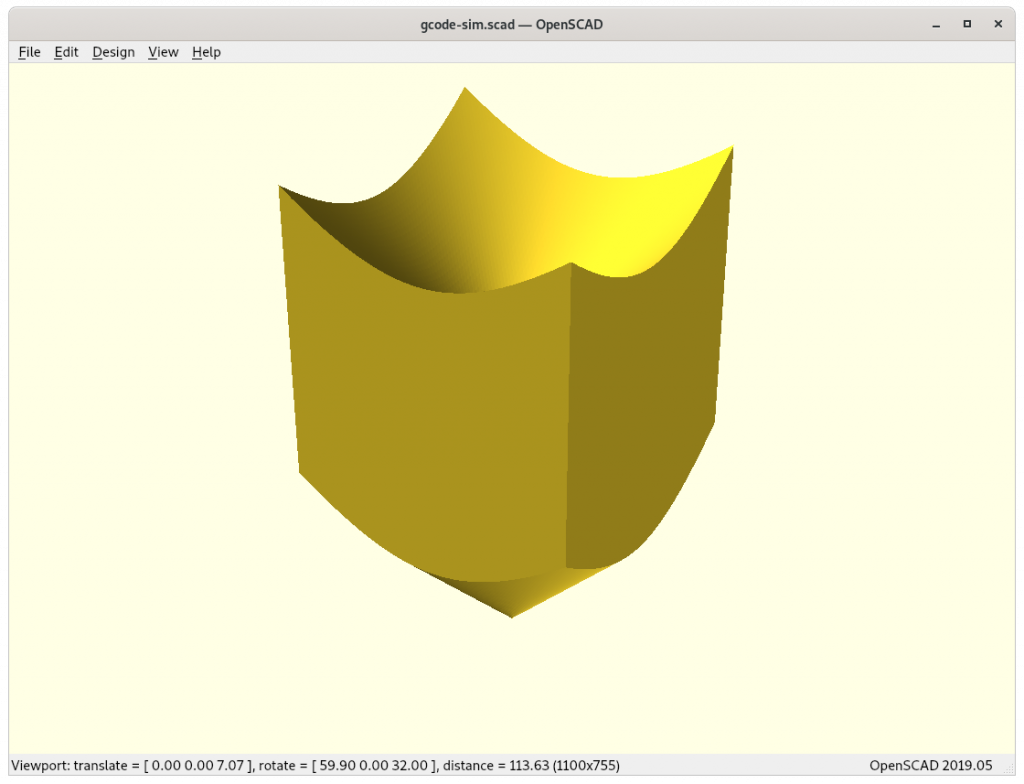
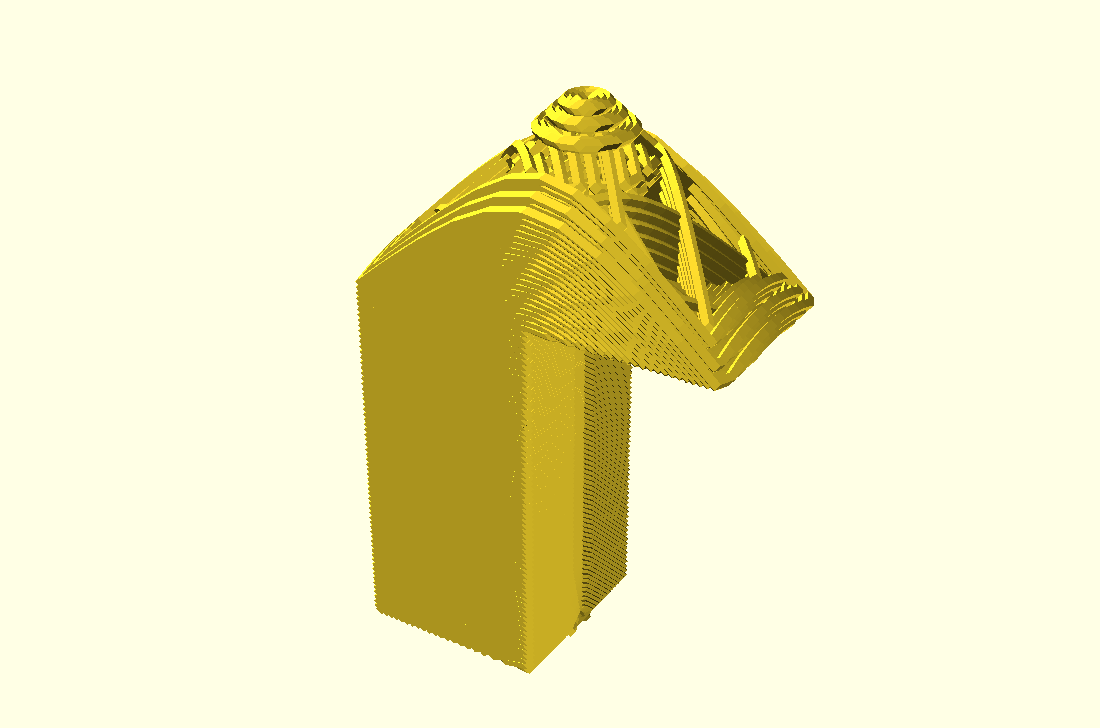
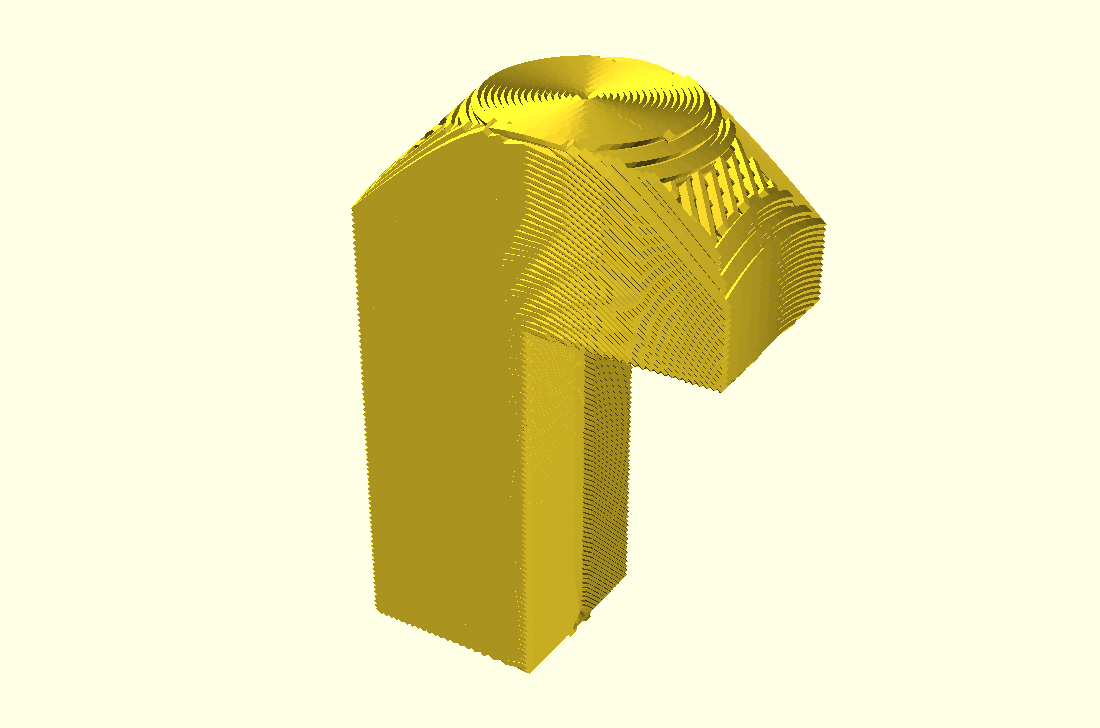
A single conic slice is covered by Z rot, C height and R, whereas slices are separated by increasing Z offset to C height, forming conic slices on top of each other:
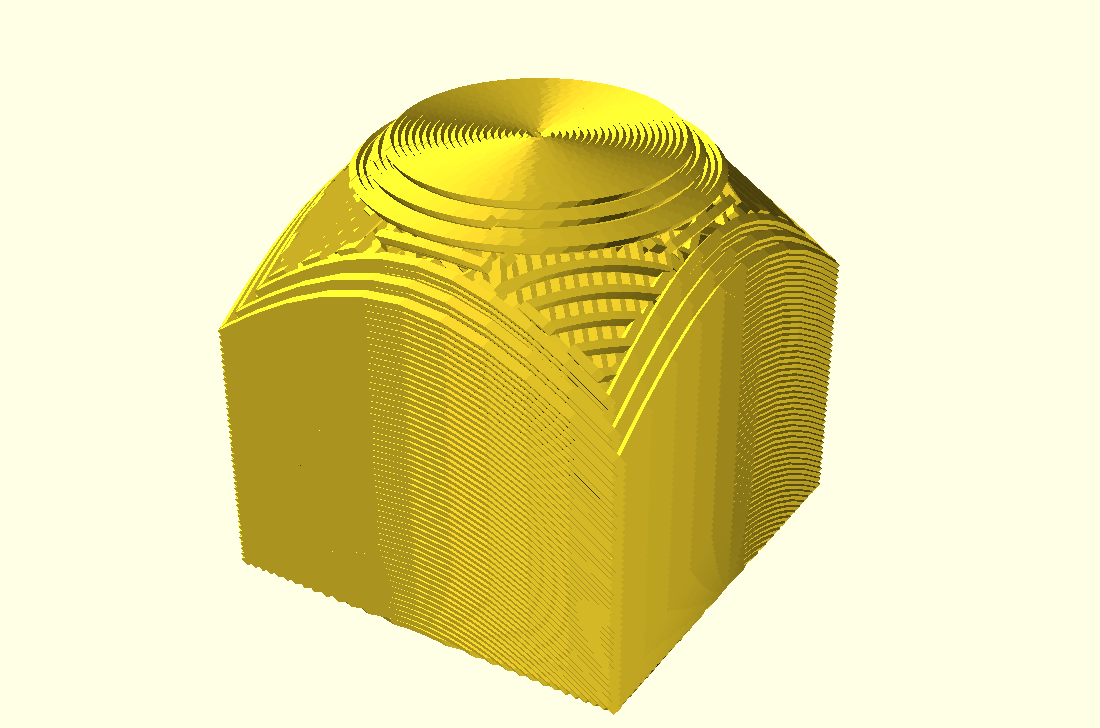
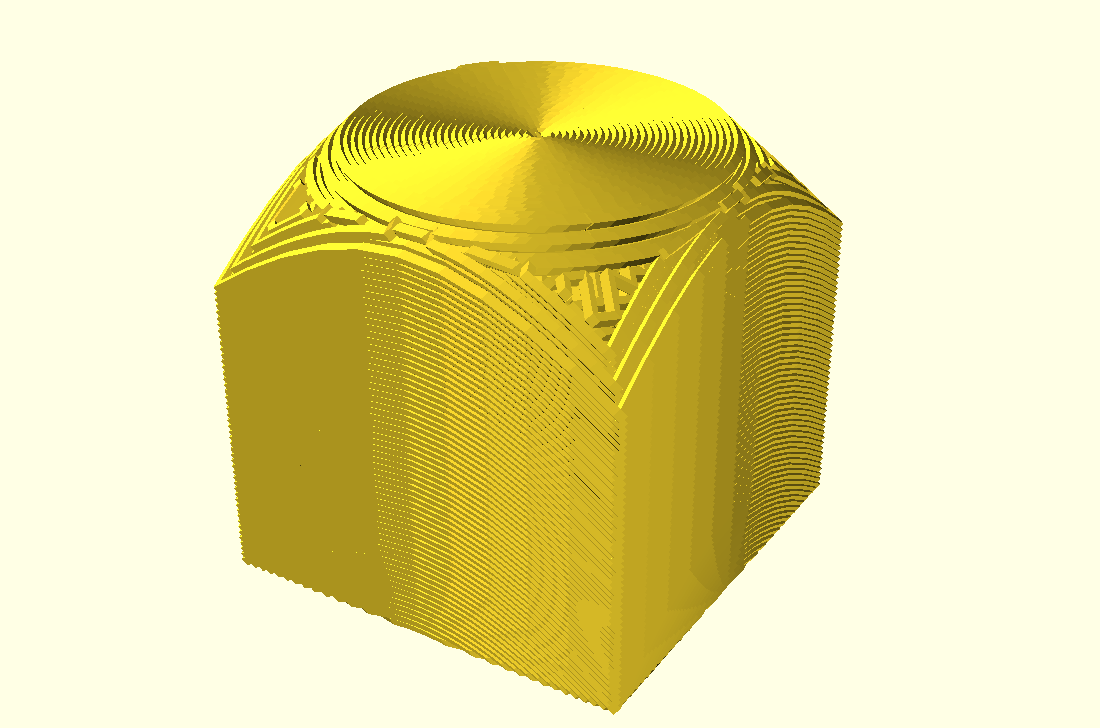
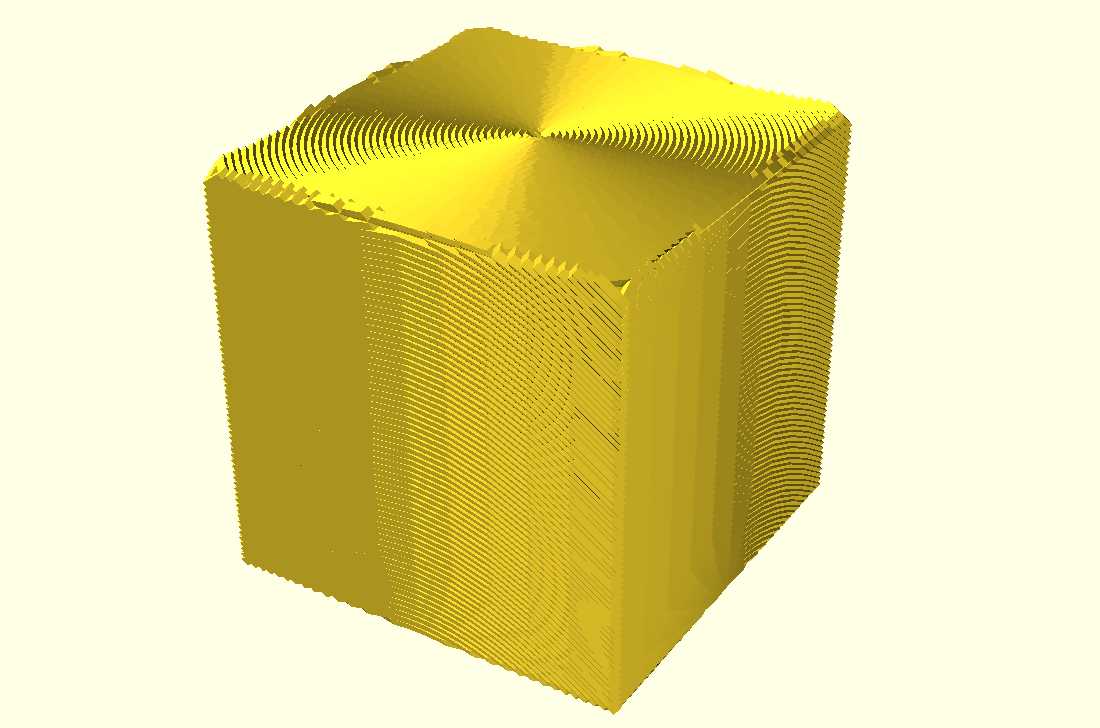
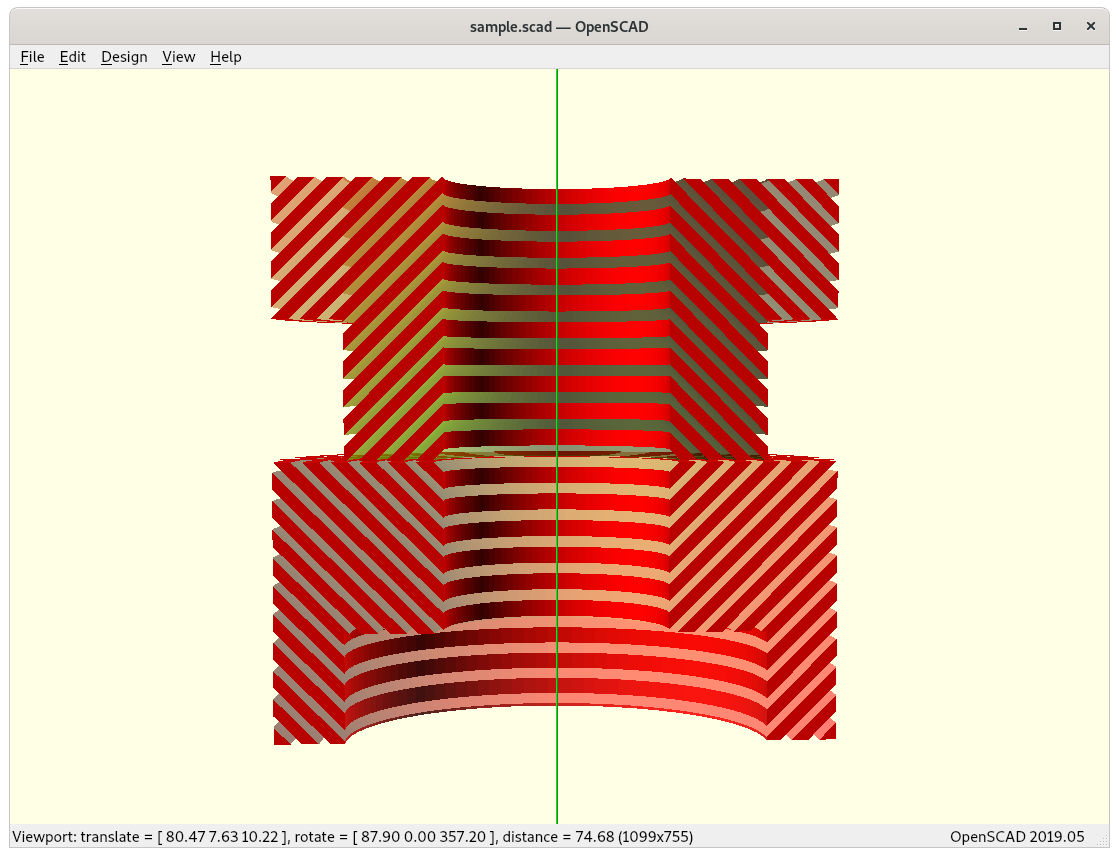
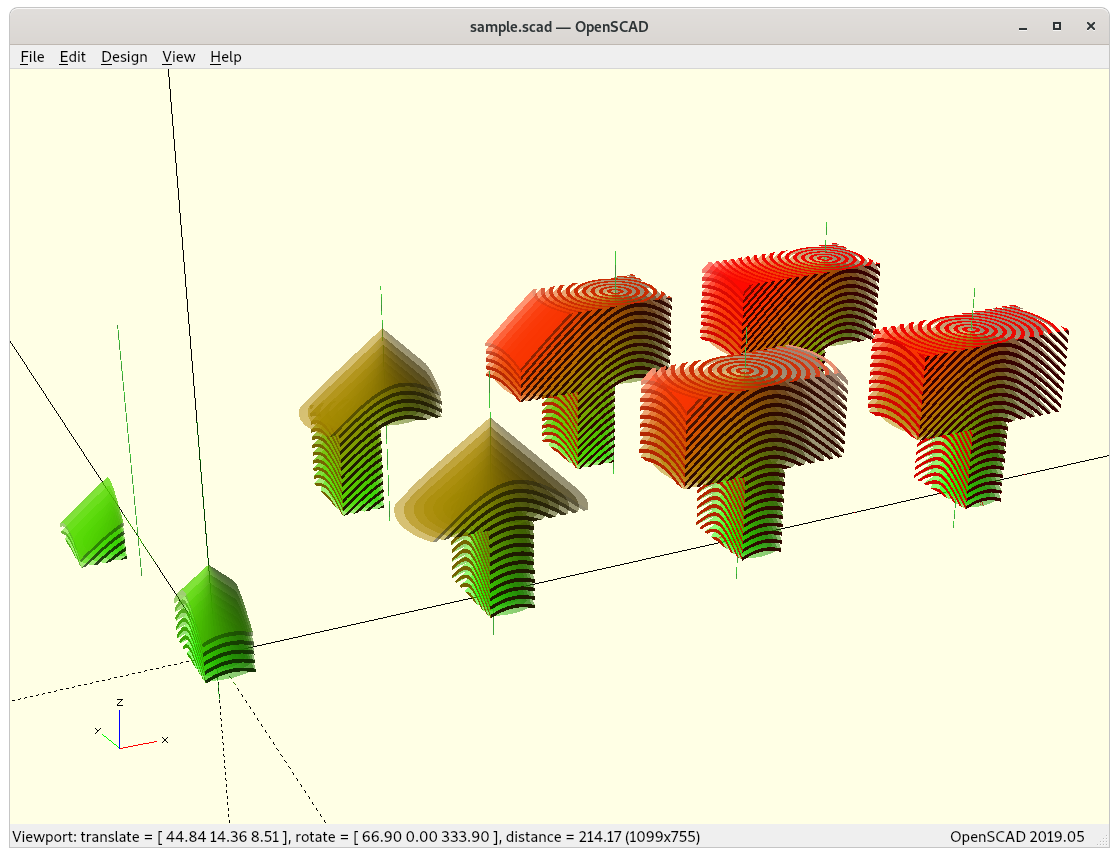
Let’s inspect the motion of a single layer: it’s curved – obviously – in X, Y and Z – this means, the Z axis has way more motion than in cartesian XZ Prusa-Mendel setup where the Z axis only changes once a layer is finished, here with cone-slicing every trace or track all traditional 3 axis are in motion, plus the 4th – the tangent on that conic trace.
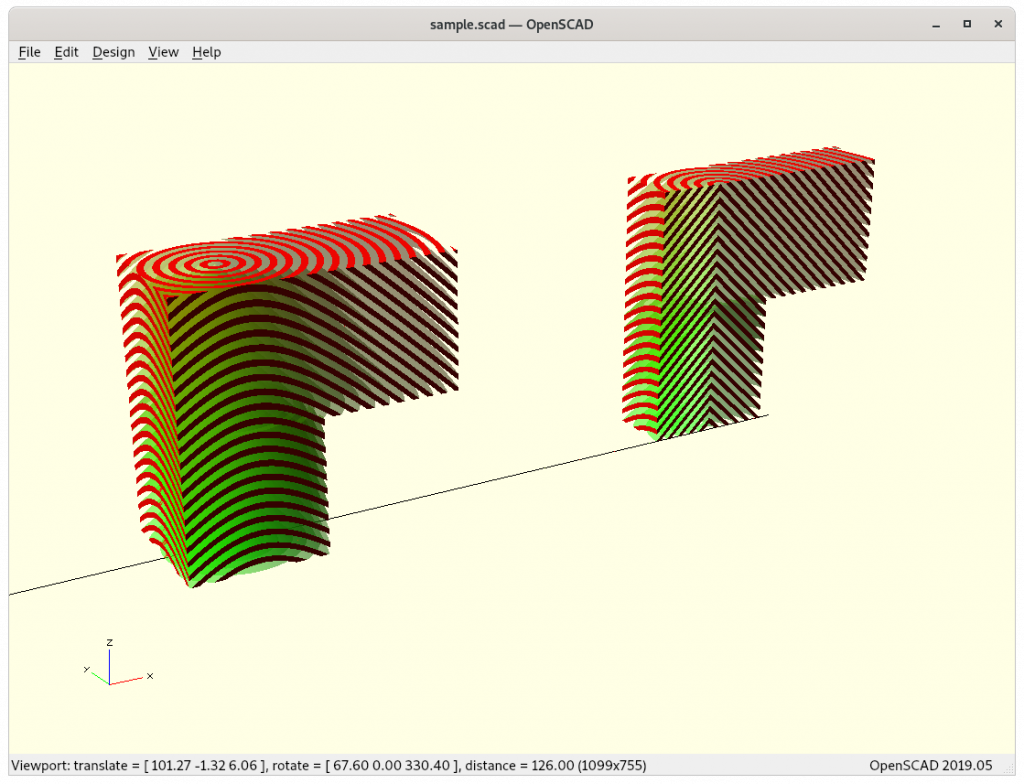
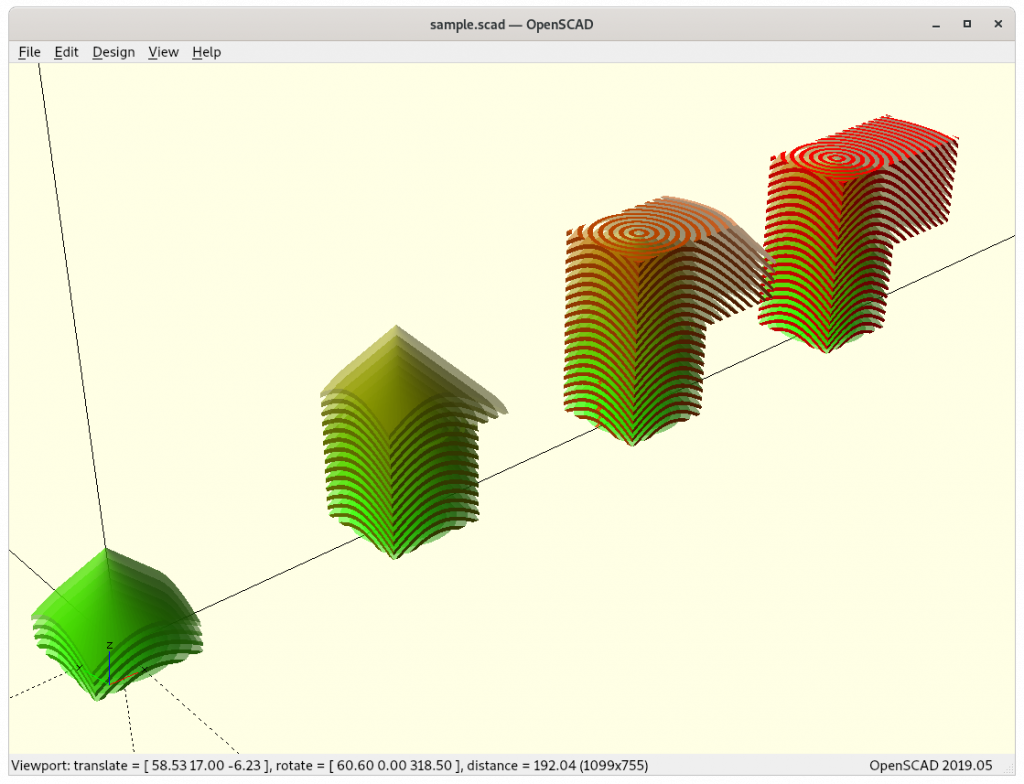
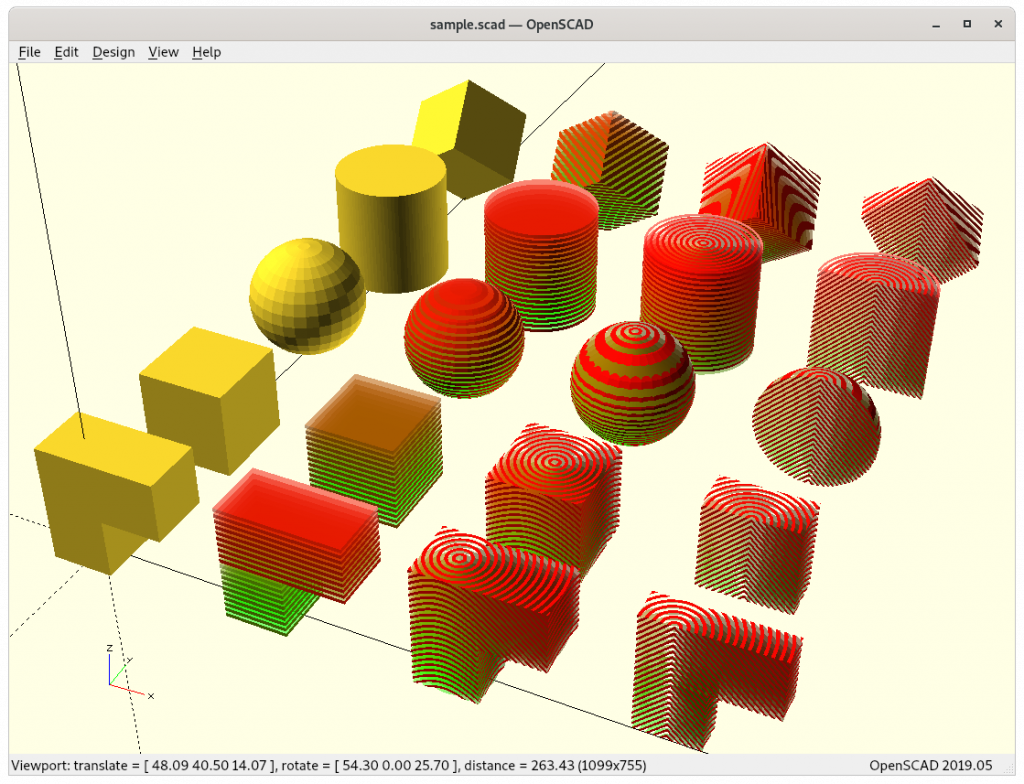
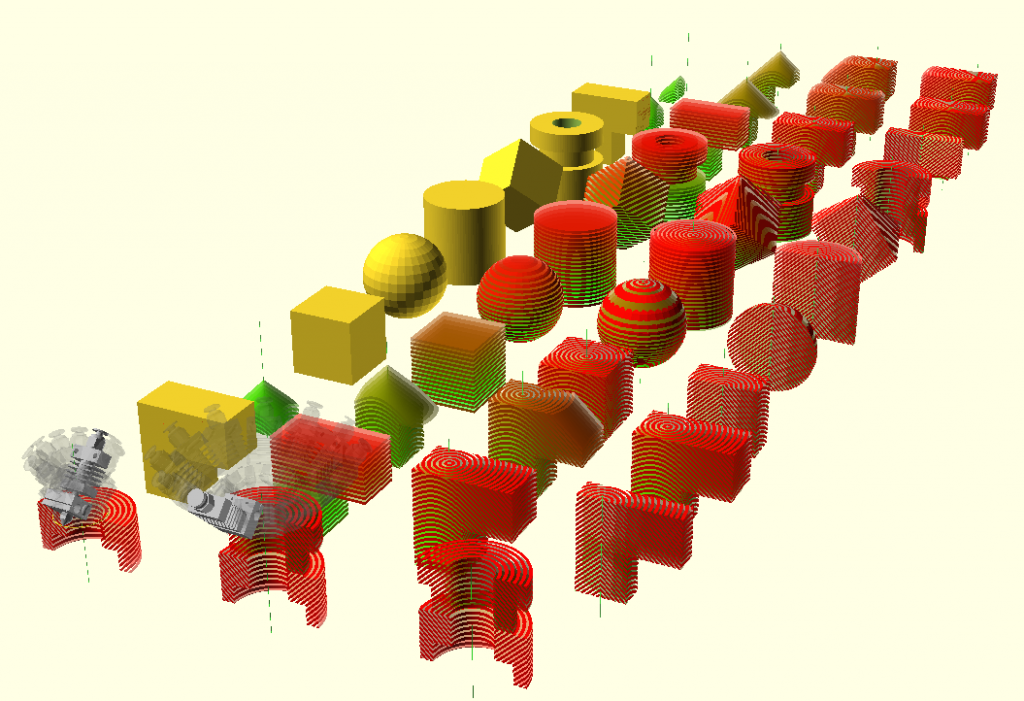
Planar vs Conic LayersMultiple solids sliced planar and in conic manner
The 45° tilted printhead allows three print modes:
non-rotation nozzle with planar Z layers (with ordinary slicer), acts like belt-printer in one direction: overhangs in one direction without support
rotation nozzle with planar Z layers (requires dedicated slicer), might support near 90° overhangs of a certain length in all X/Y plane directions as well – but needs to be tested
rotation nozzle with conic Z layers (requires dedicated slicer or pre- and post-processing while using ordinary slicers)
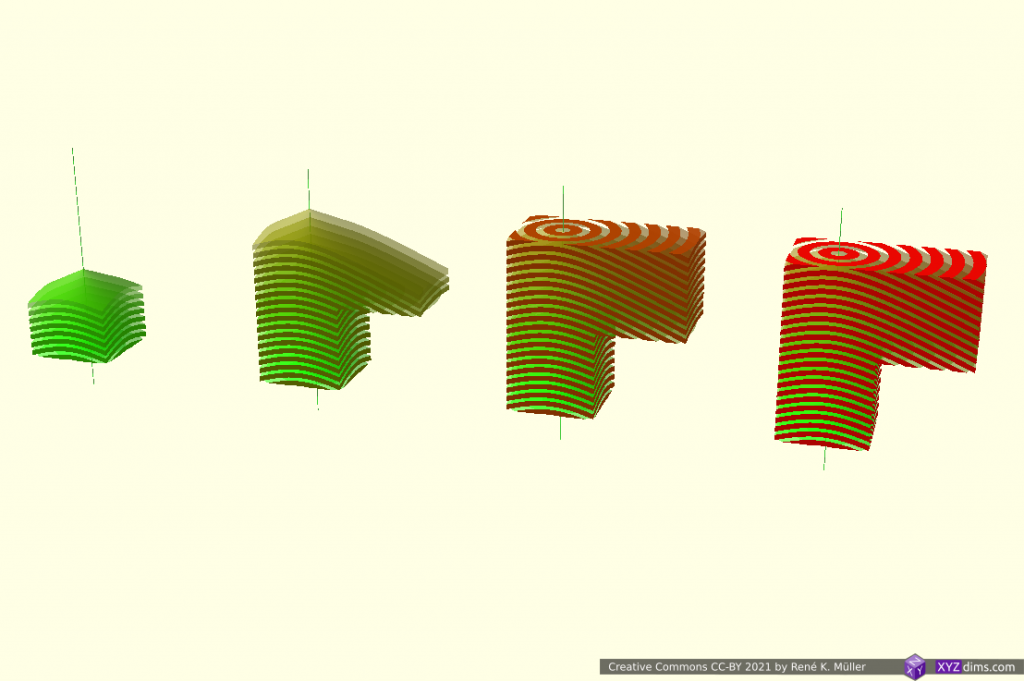
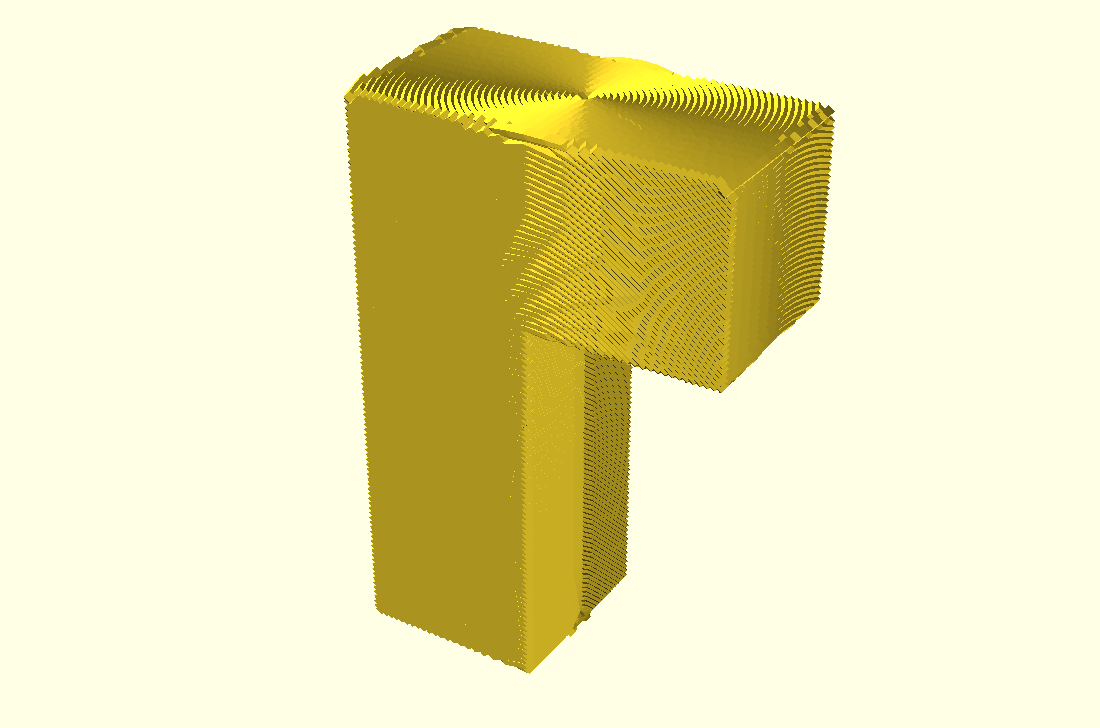
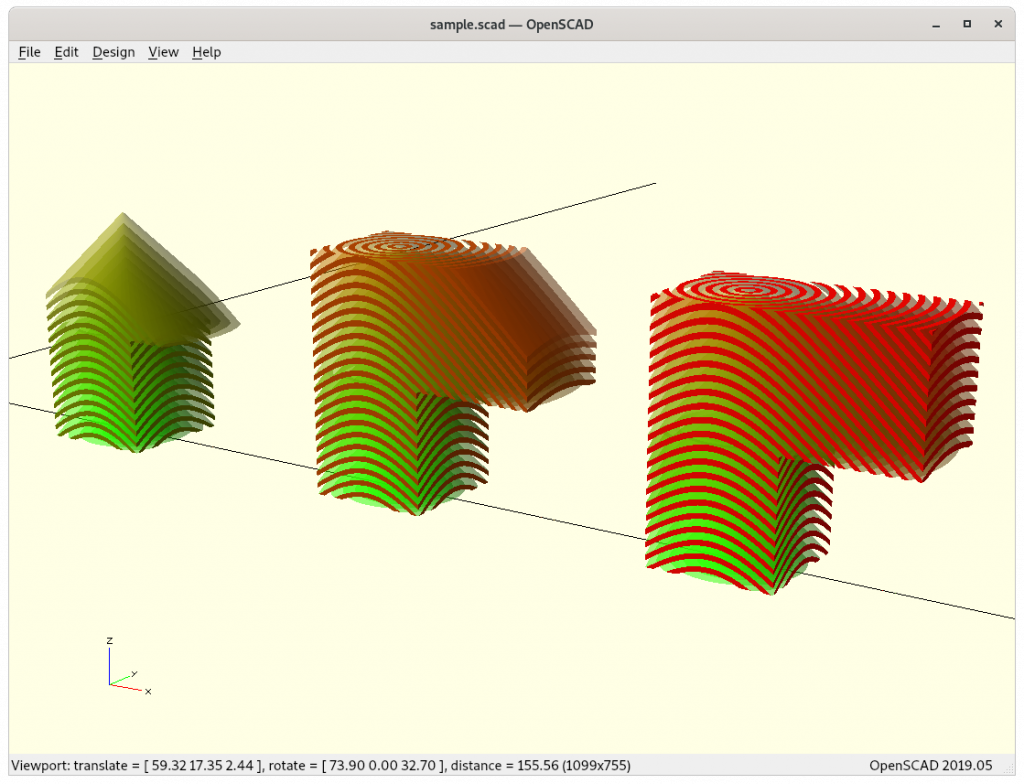
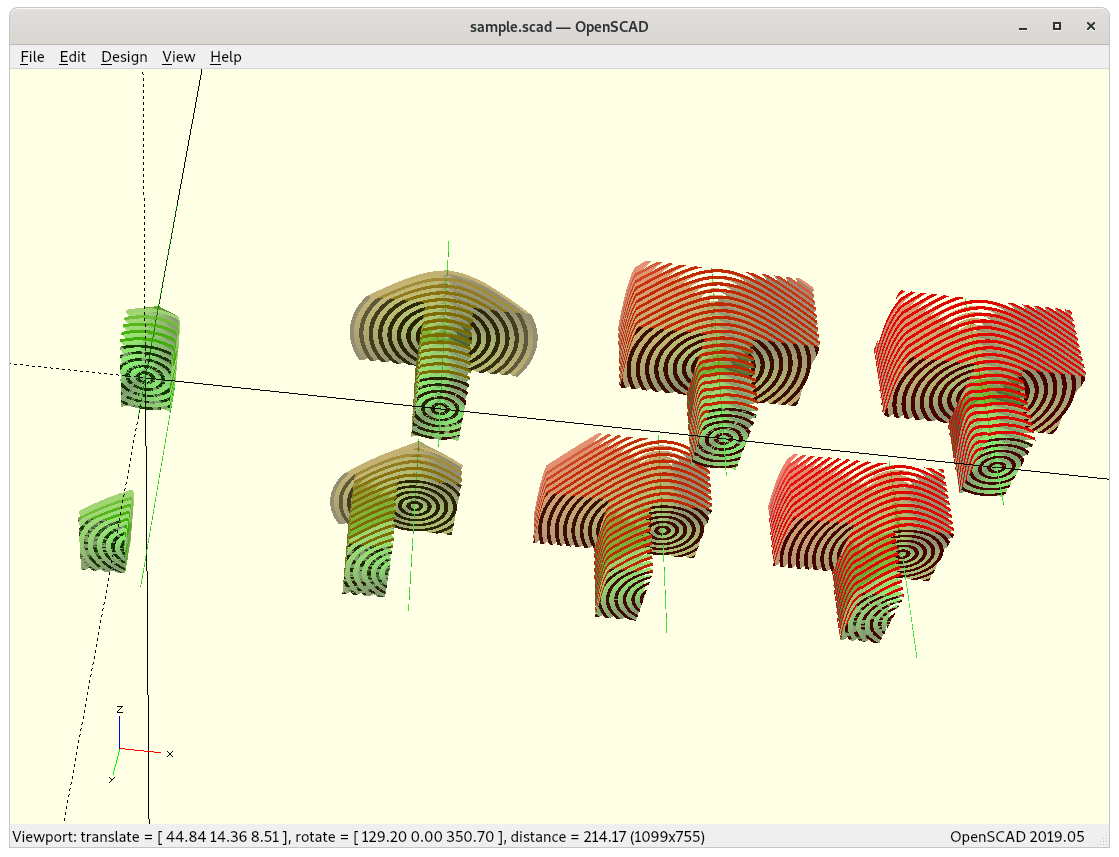
And by choosing the position of the “axis” of the conic slicing within the model and the cone direction matters then as well:
T-piece slicedT-piece with different axis centers: axis center determines printable overhangs or not (2nd row isn’t printable that way)T-piece with different axis centers: axis center determines printable overhangs or not(2nd row isn’t printable that way)overhangs toward and away from axis
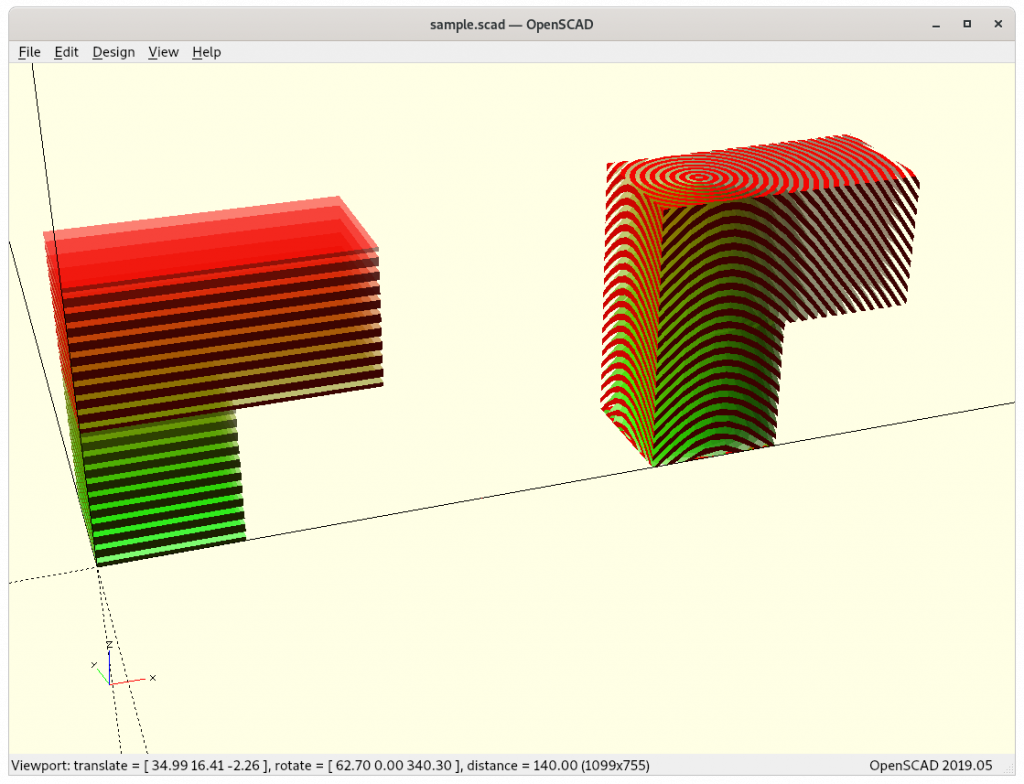
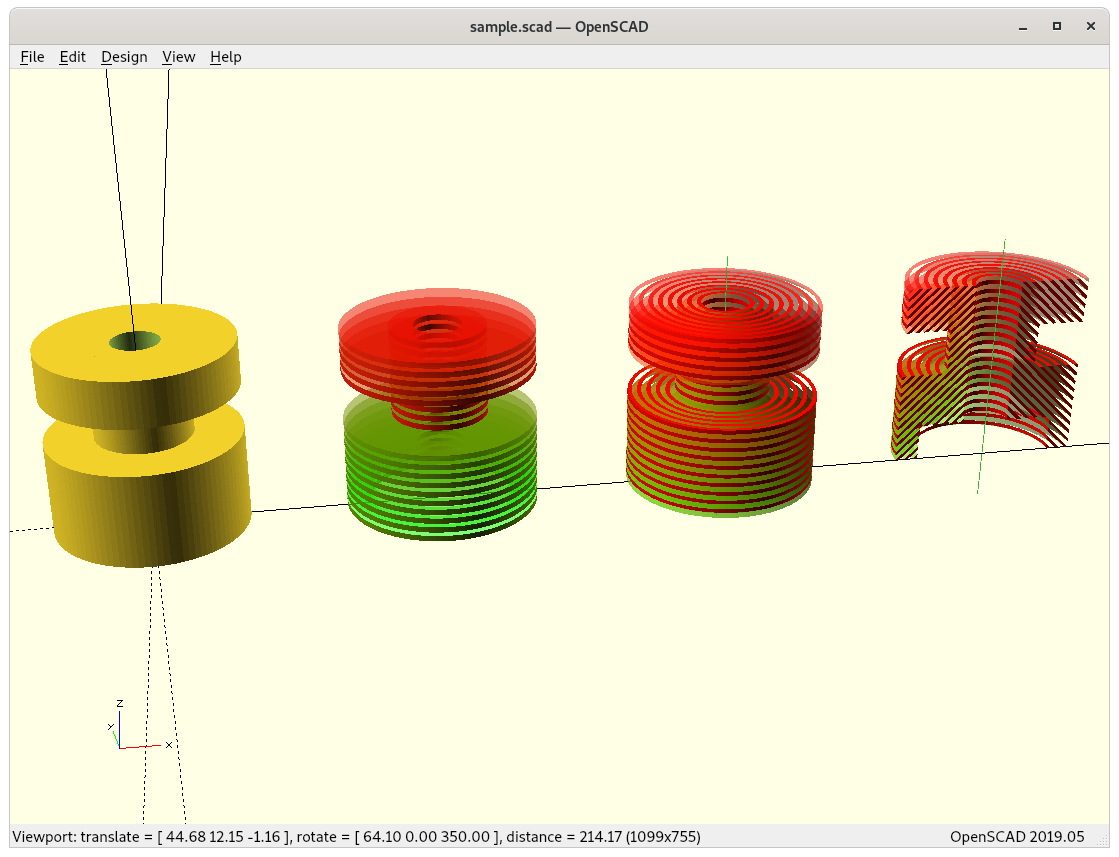
The last piece with inside and outside looking overhangs requires a switch of nozzle direction, e.g by default the sliced cones are ordered ▲ (outside-in or outside-cones) where outward overhangs work, but for inward overhangs the opposite direction of the nozzle looking outside is required ▼(inside-out or inside-cones), like this piece:
Vertical splitted: bottom half with overhang toward cone axis Inside Cone print, upper half with overhang away from cone axis Outside Cone printing, all without supportVertical splitted: bottom half with overhang toward cone axis Inside Cone print, upper half with overhang away from cone axis Outside Cone printing, all without support
So the slicing software needs to recognize this, and the sliced cones switched either ▼ or ▲ according Z level.
These aspects opens a whole new range of considerations how to orient a piece and where to position the newly introduced slicing axis, and which kind of cones need to laid at which level.
Issues to Resolve
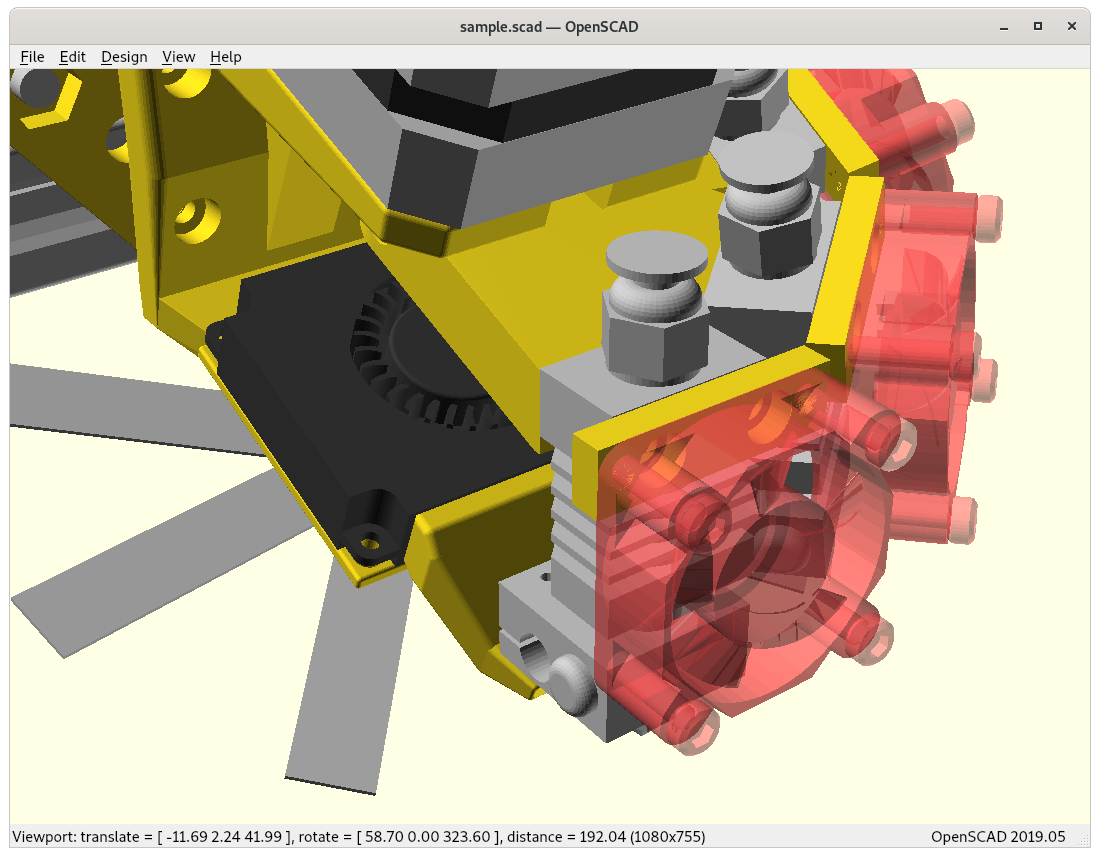
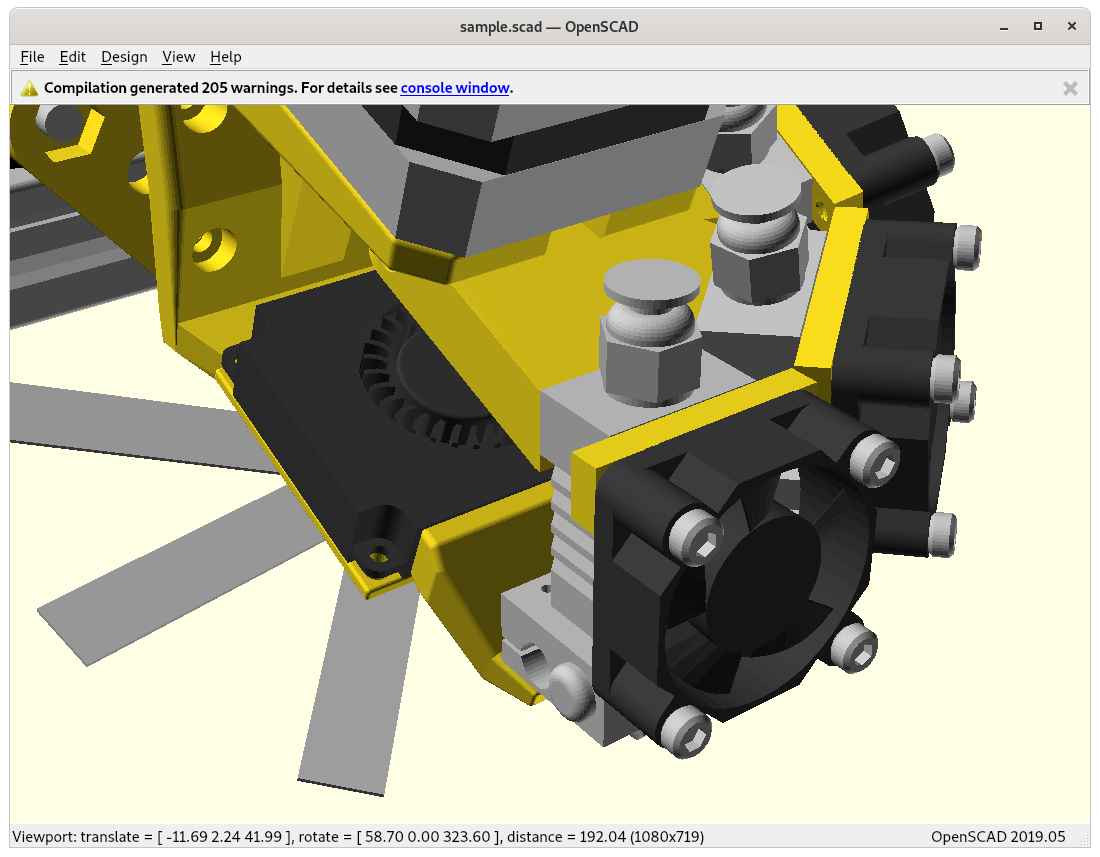
Heatsink fan mount: needs to be mounted for both variants, Micro Swiss and E3D Volcano ideally
Part cooler:
have the part cooler rotate on Z axis as well? yes for now
using a flexible pipe to blow air near the nozzle instead
heatsink fanwith part coolerpart cooler nozzleensuring the part cooler doesn’t collide/intersect with conic slice
Z rotation calibration:
alike with X or Y stop, but a trigger rotating from one direction only and then set a angle offset
Z rotation motor mount adaptable for different kind of printheads
keep it modular
ensure the nozzle end is centered (allow simple center calibration)
Properly document design and features of Rotating Tilted Nozzle as there isn’t much detail information available
dedicate slicer for conic slicing, e.g. adapt Mandoline Py
Considerations
Pros
conic layers: printing 90° overhangs without support, given some conditions are met:
overhangs must be horizontally or vertically rotational symmetric and aligned with the cone axis to switch from outside to inside cone printing or vice-versa (to do: more use cases explored and documented)
conic layers: stronger pieces as layers cross X, Y and Z in non-planar manner, mechanical forces distribute further than just planar layers
planar layers / rotating nozzle: perhaps close to 90° overhangs (speculative) requires new overhang algorithms in slicer
conic layers: more things to consider (preferably recognized by the slicing software):
overhangs must be horizontally or vertically rotational symmetric and align with cone axis to take advantage of it (complex compartmentalizing of different cone-direction per overhang and newly introduced seams between those)
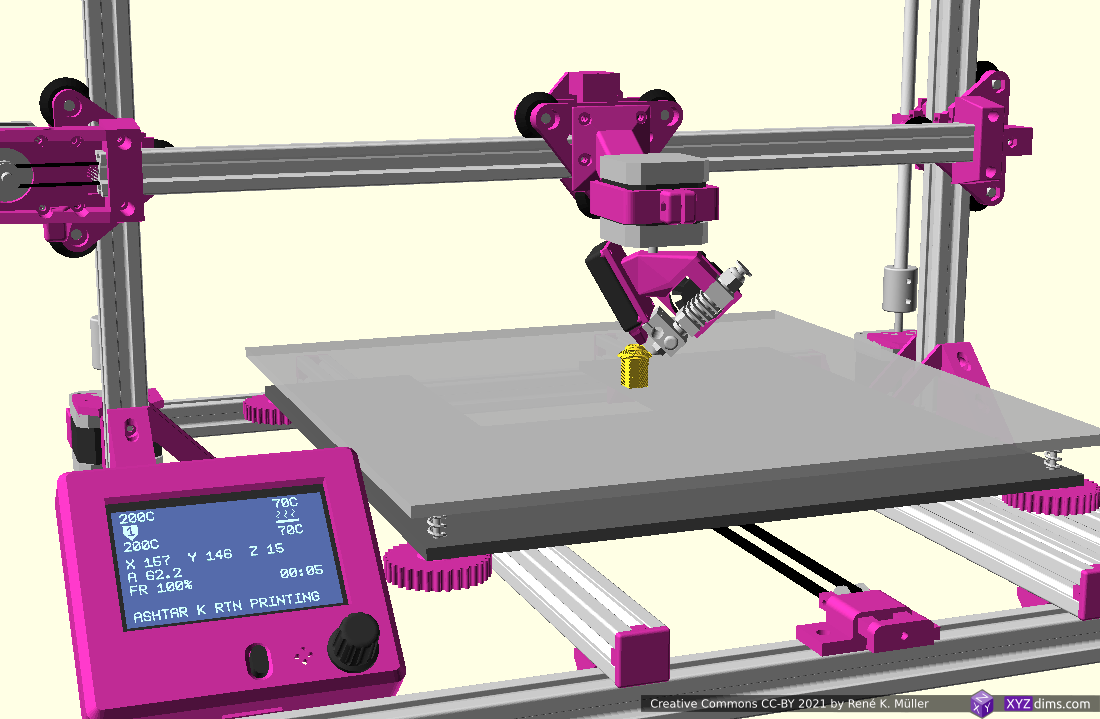
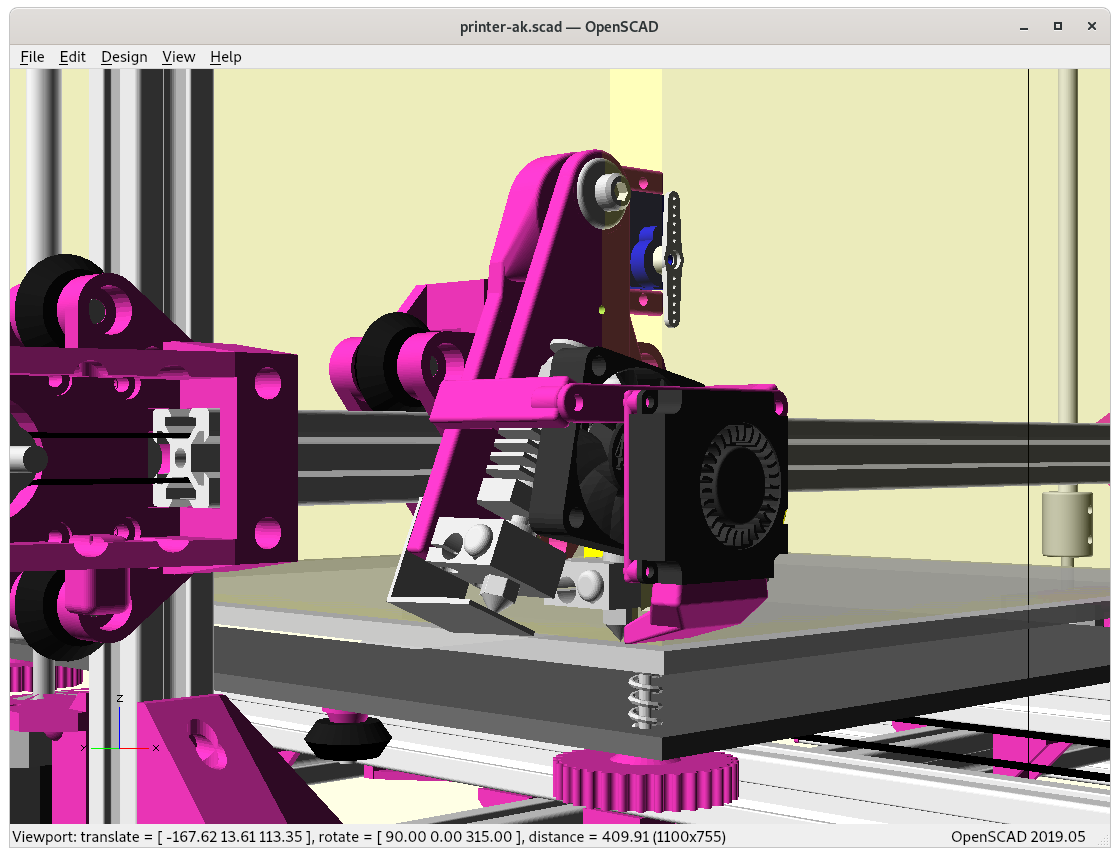
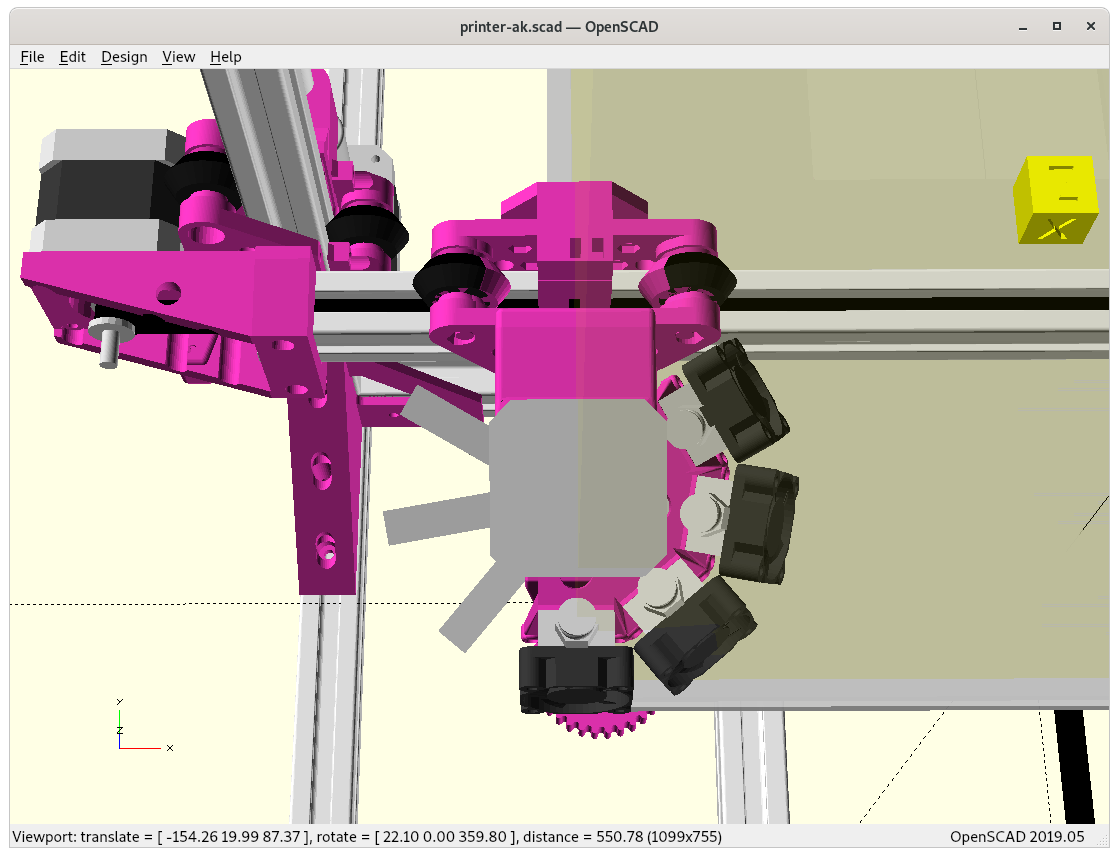
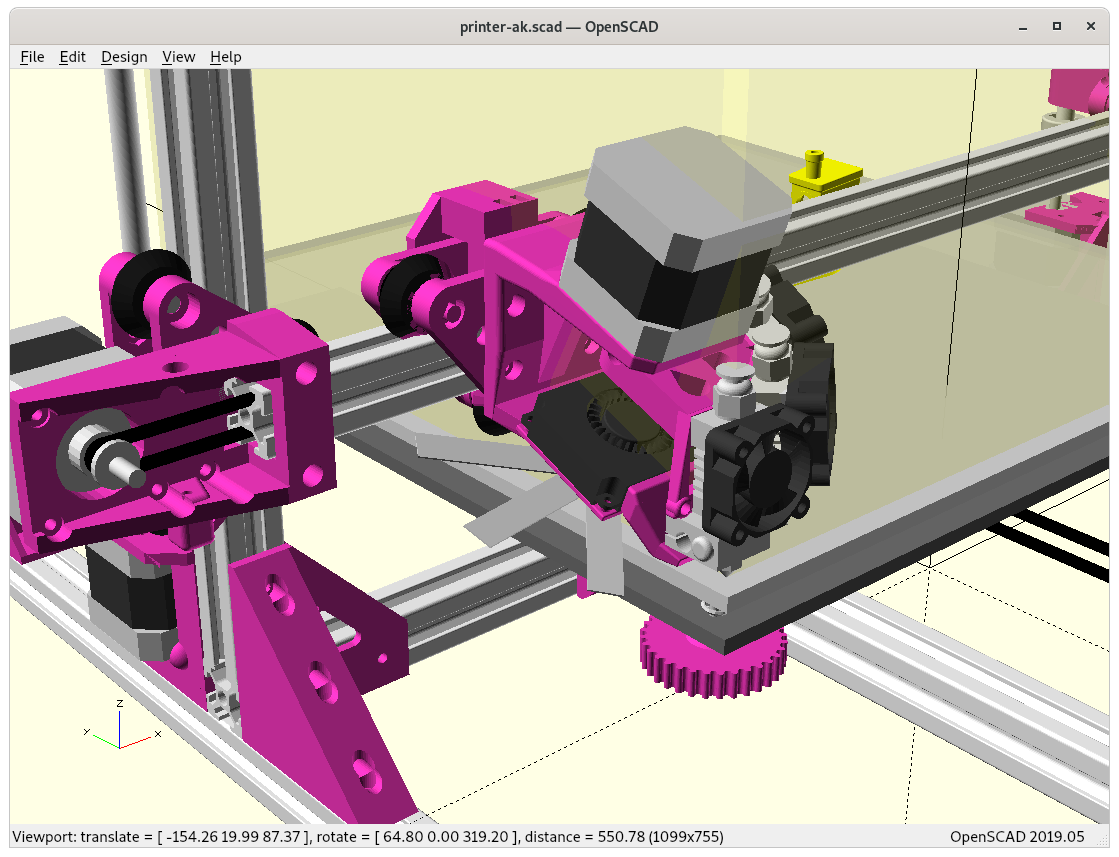
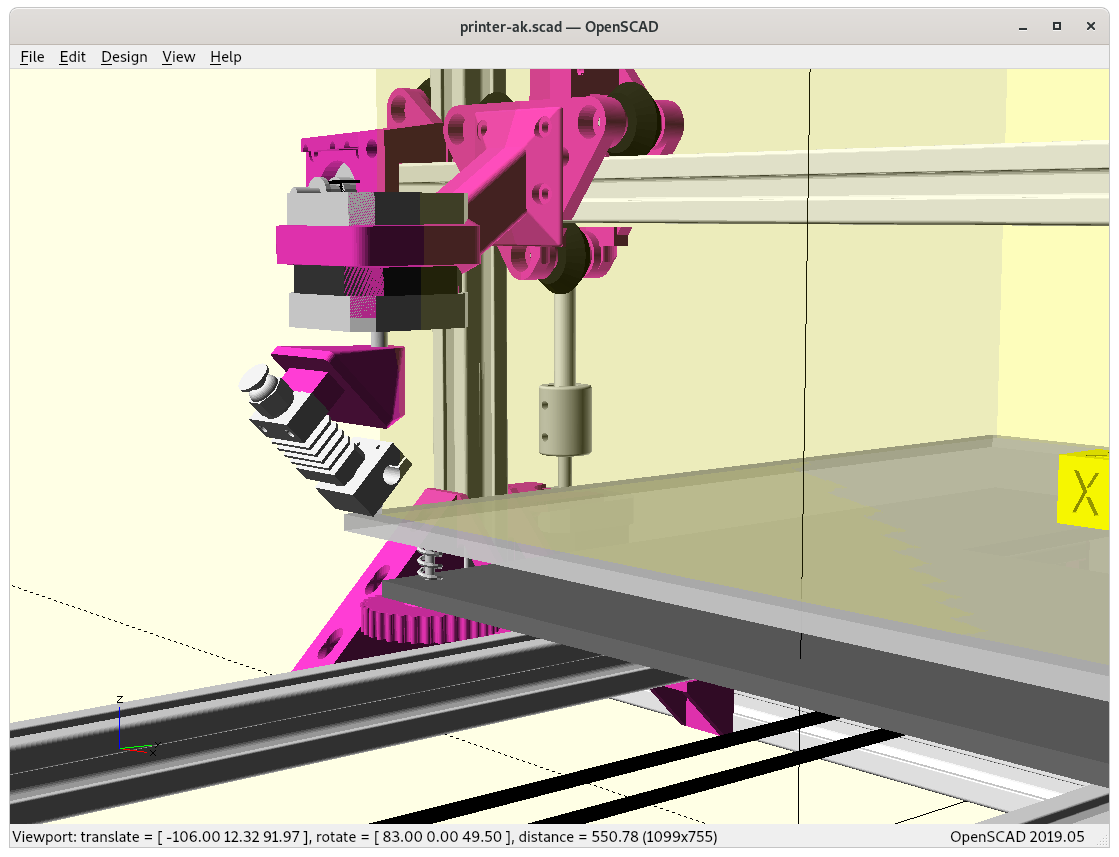
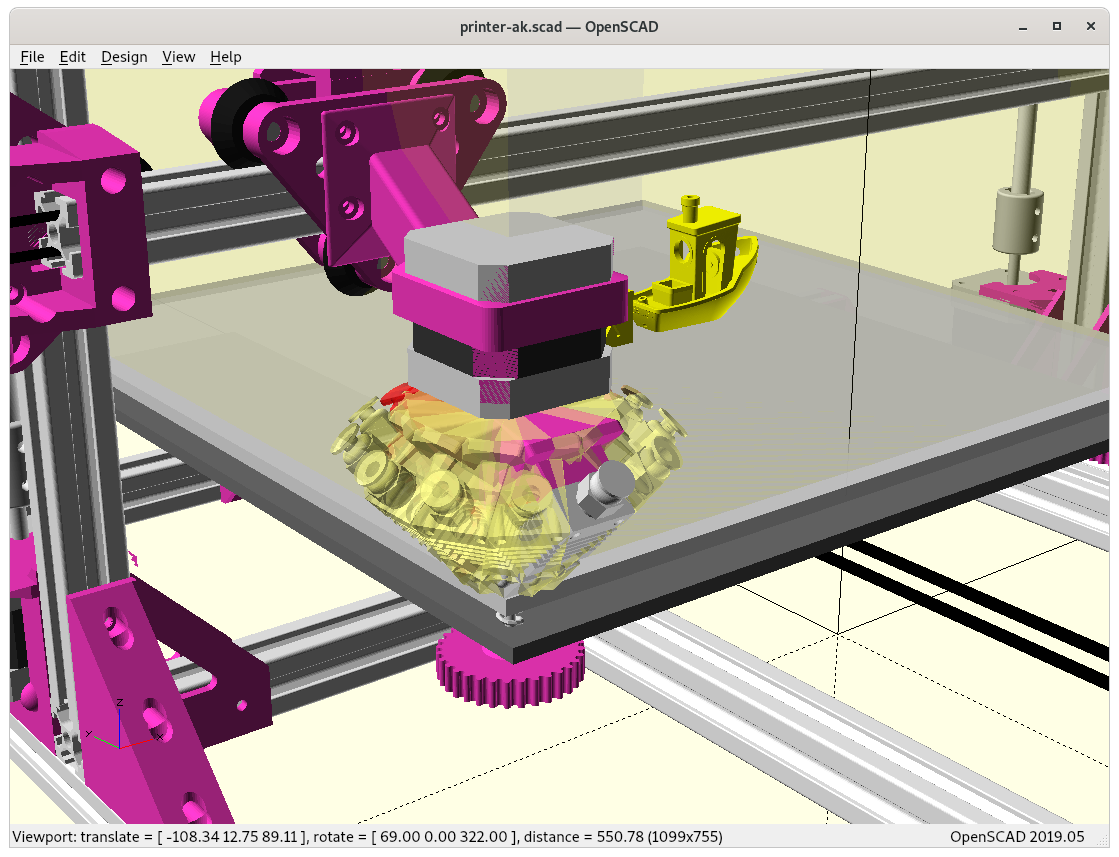
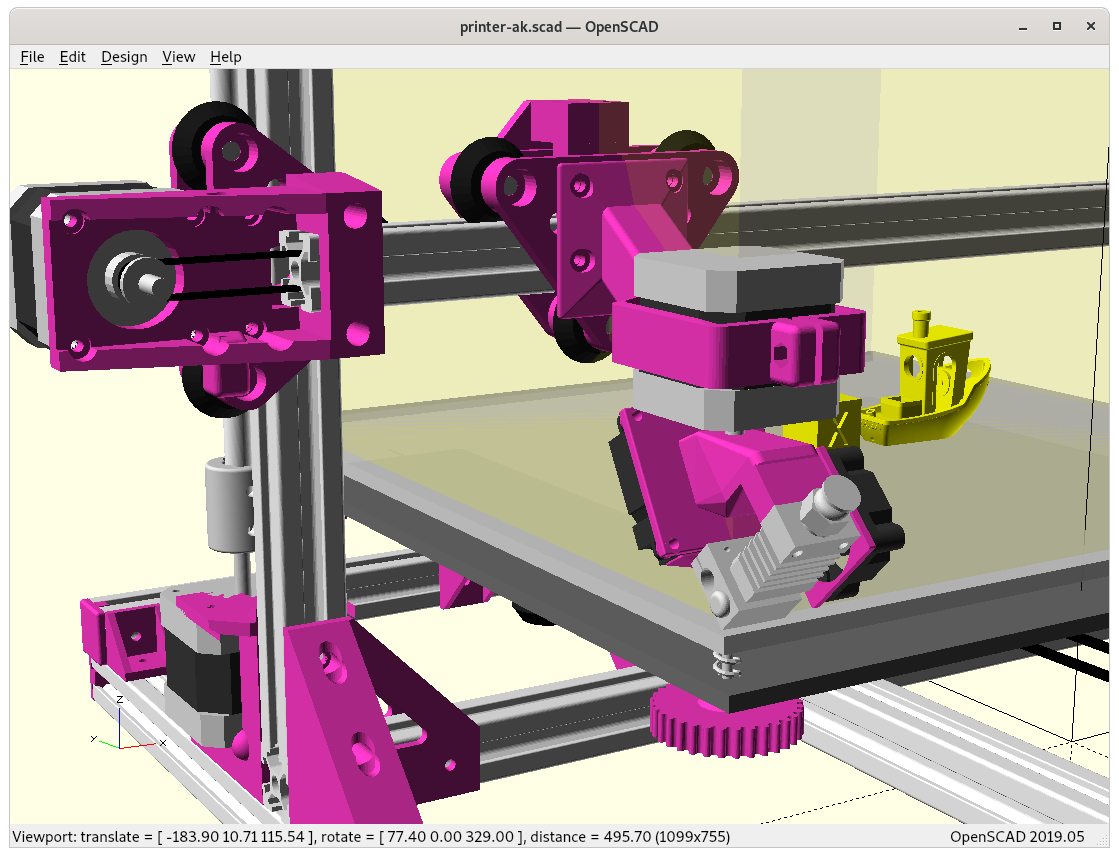
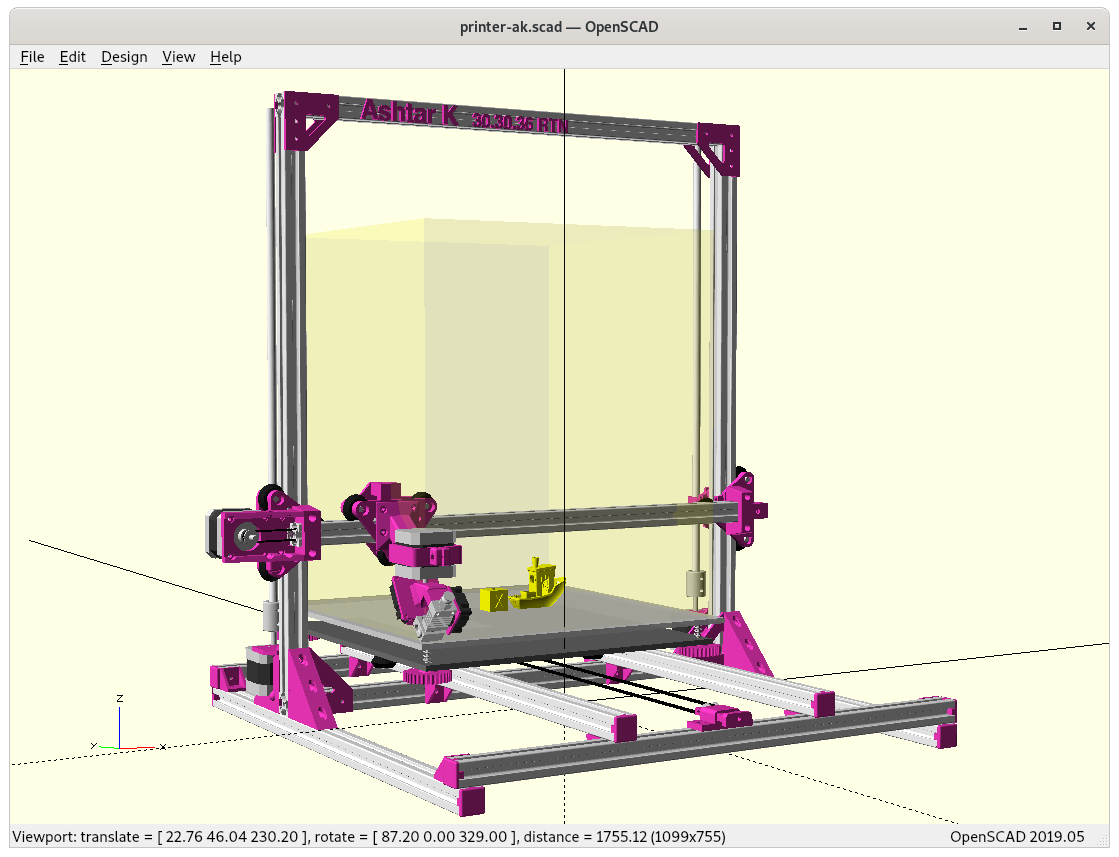
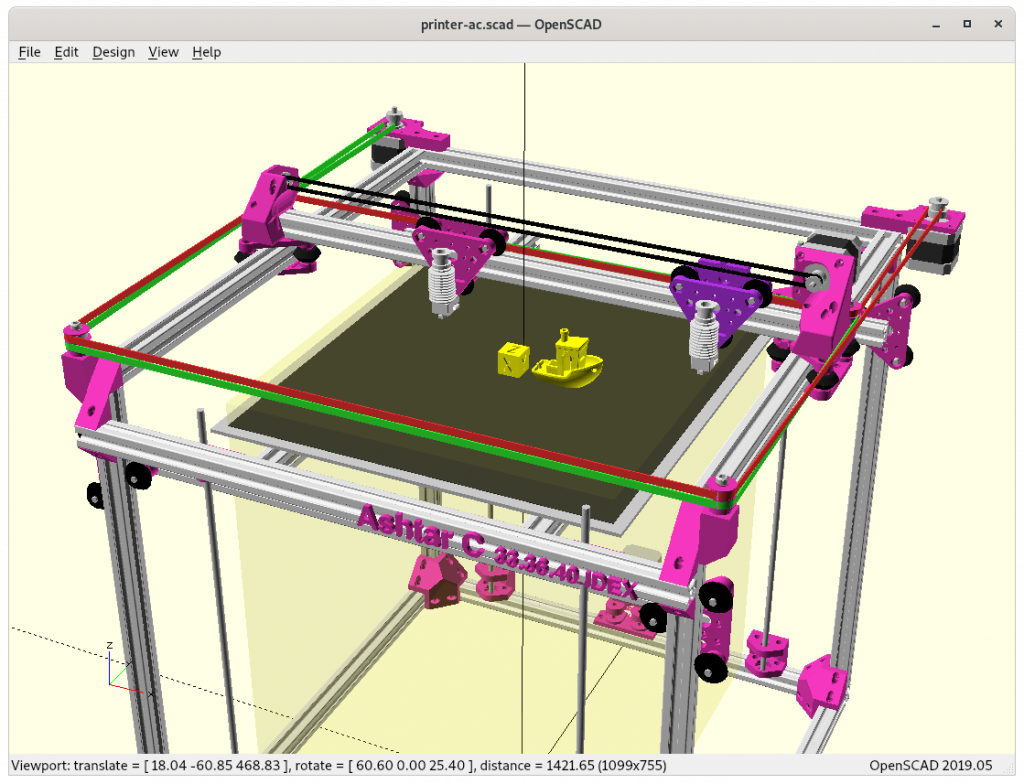
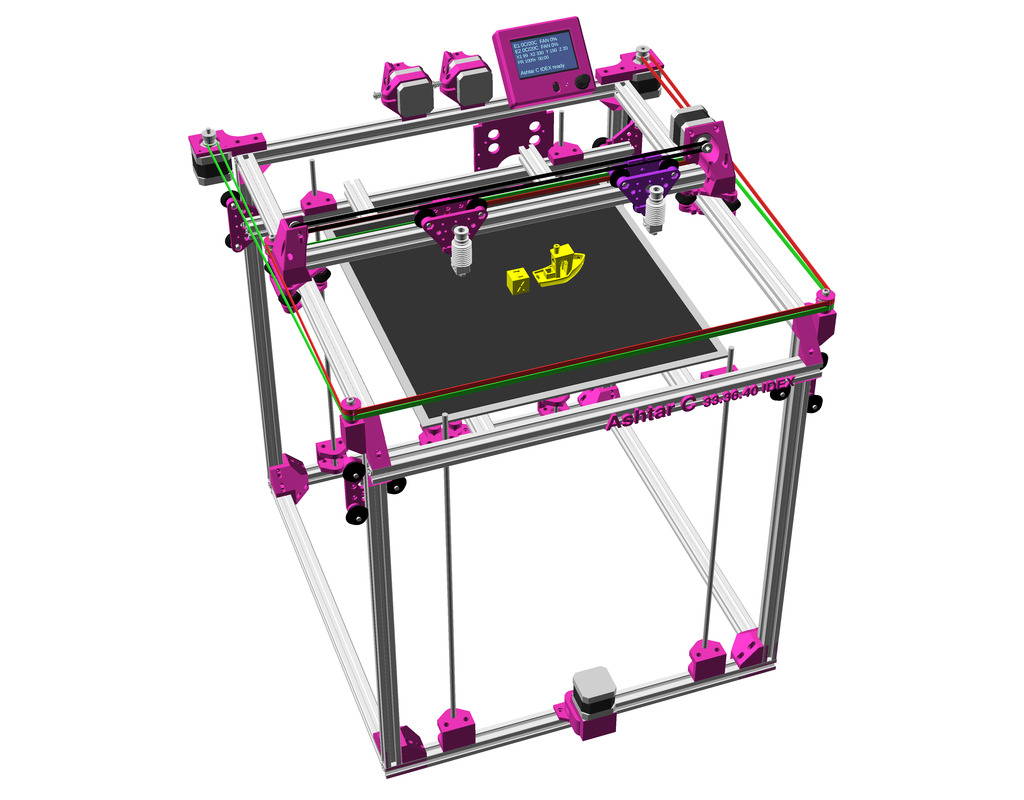
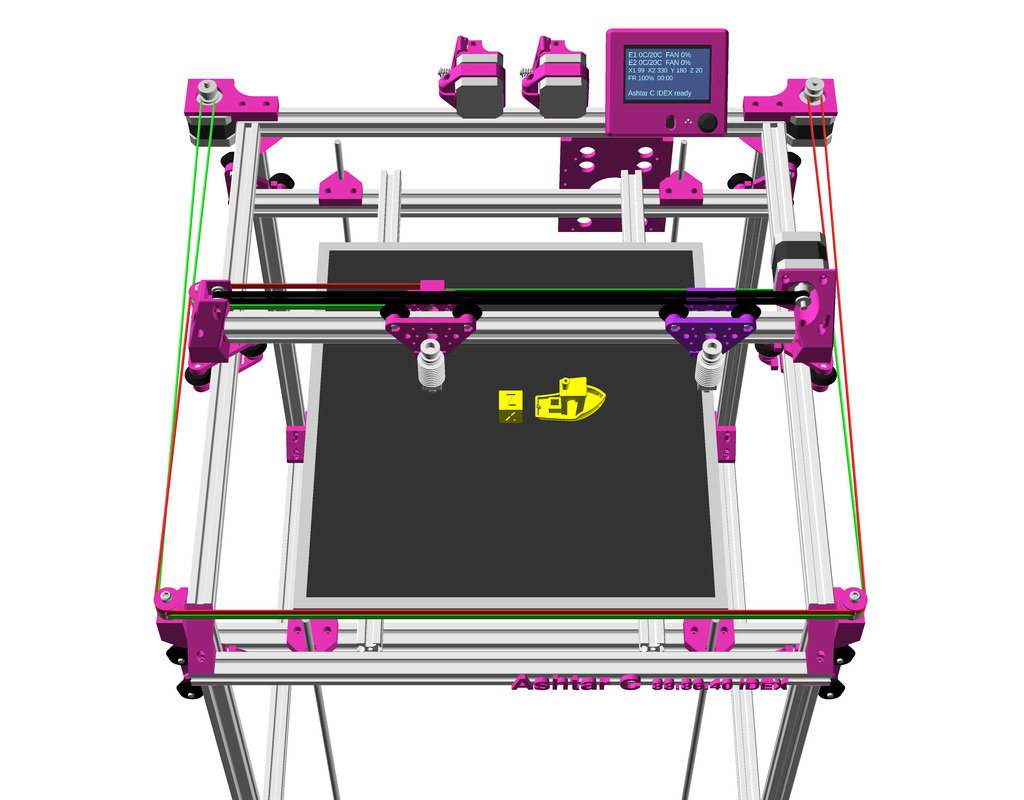
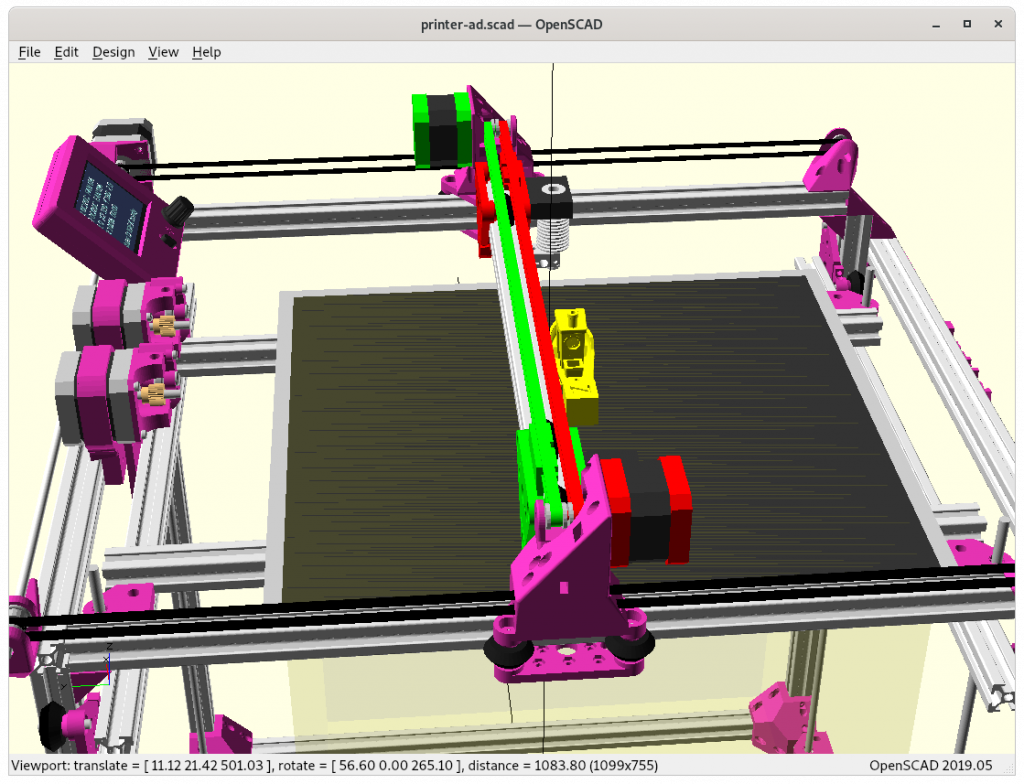
Ashtar K with Rotating Tilted Nozzle (RTN)
The additional Y offset is about 20mm, and losing apprx. 50 mm in Z build volume in its current form:
at X=0, Y=0, Z=0, Zrot=0 positionat 0,0,0,0 positionadding heatsink fan & part coolerAshtar K RTNAshtar K RTN (animated)Ashtar K RTN printing conic sliced overhang model (animated)
Fallback Print Horizontal Slices
Some parts may not require conic slices, e.g. introducing new unprintable overhangs which in horizontal slices would not exist, so a simple way to print traditional sliced models is by adding a proper rotation angle (e.g. G-code A..) so the nozzle extrudes nicely, something like:
Horizontally sliced 20mm cube printing with enhanced G-code with rtnenhancer
I wrote a small script called rtnenhancer which converts existing G-code to enhanced G-code.
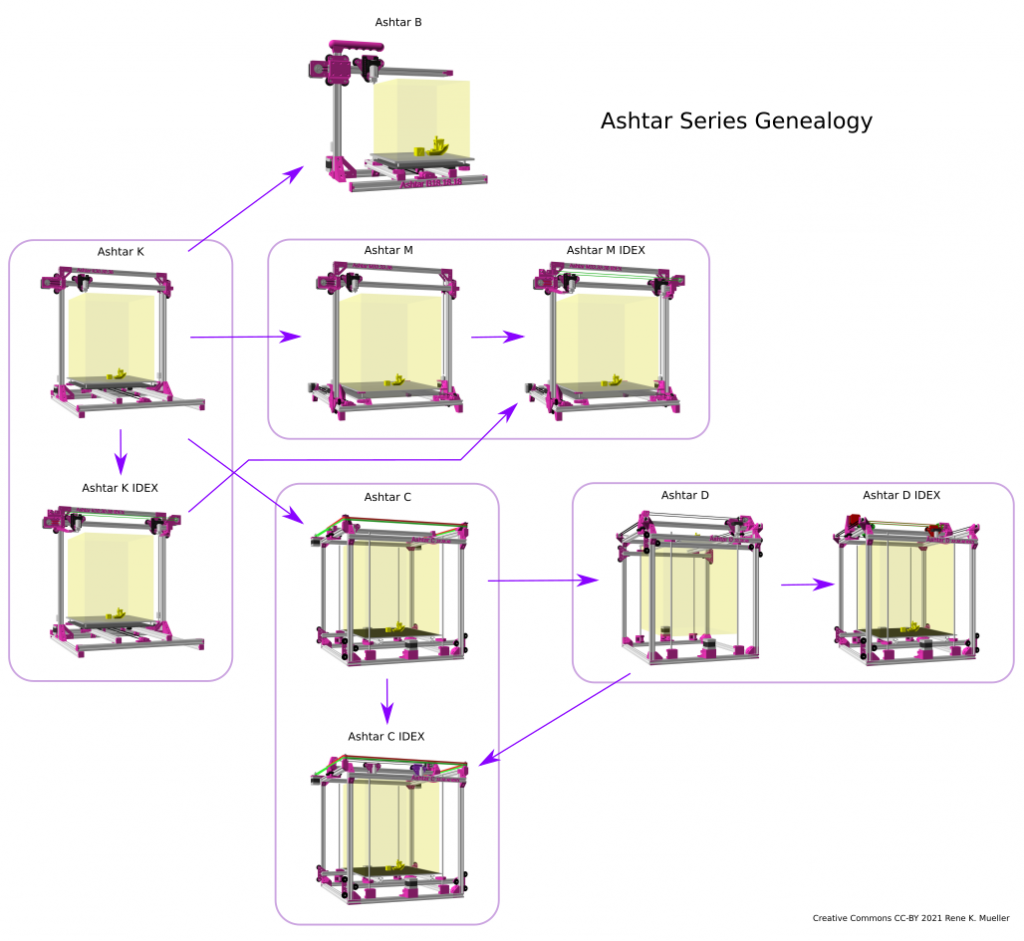
2021/01/18: added IDEX Features with Pros/Cons, Ashtar Series Genealogy, Comparison Dual Material approaches, and brief Hardware Requirements
2021/01/15: first version with overview side-by-side
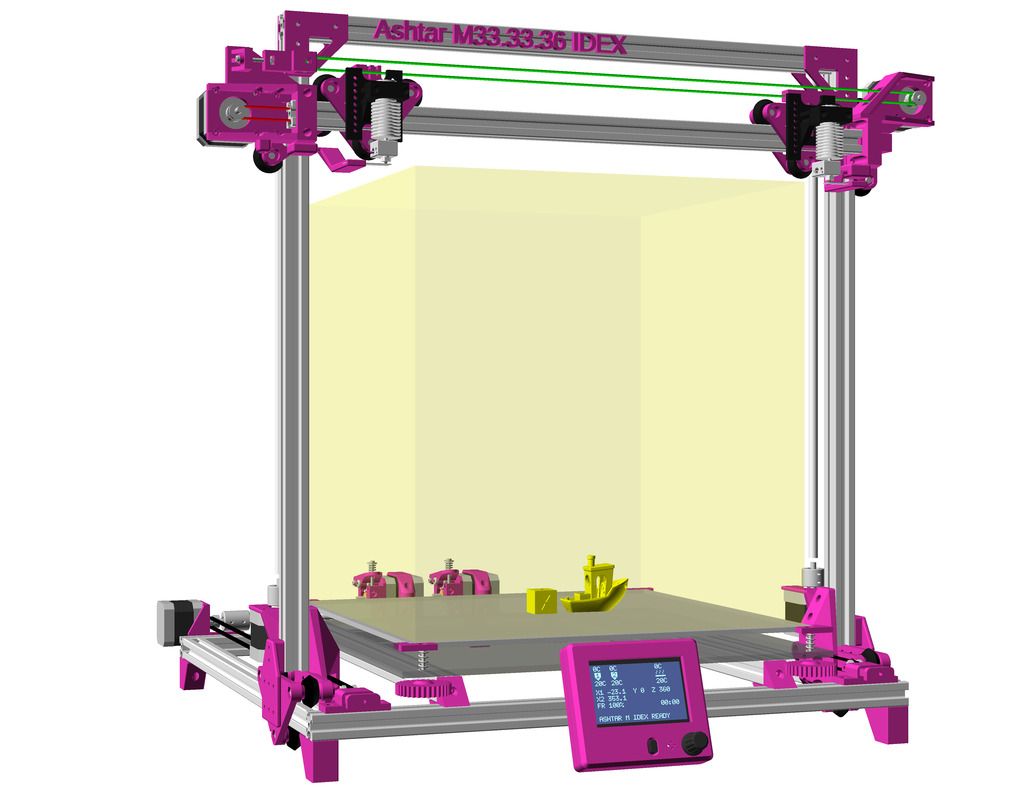
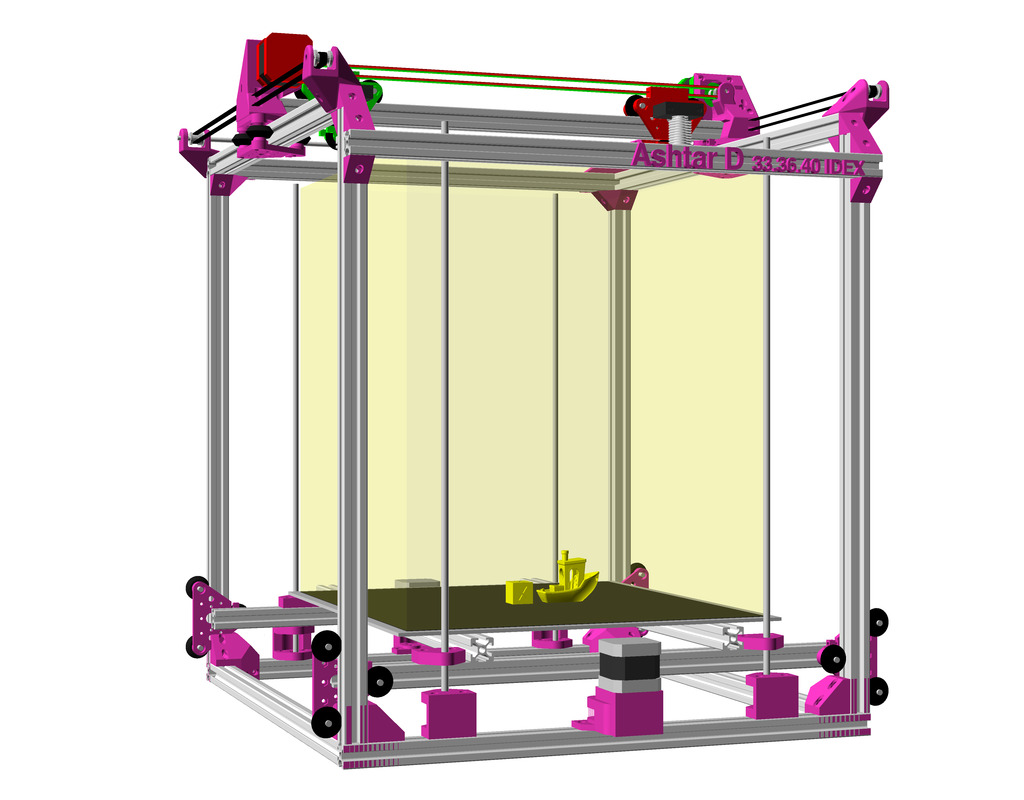
Mid of January 2021 (01/12 – 01/14) I added IDEX (Independent Dual Extrusion) option to 4 designs, all still in early draft stage – here as a summary side-by-side:
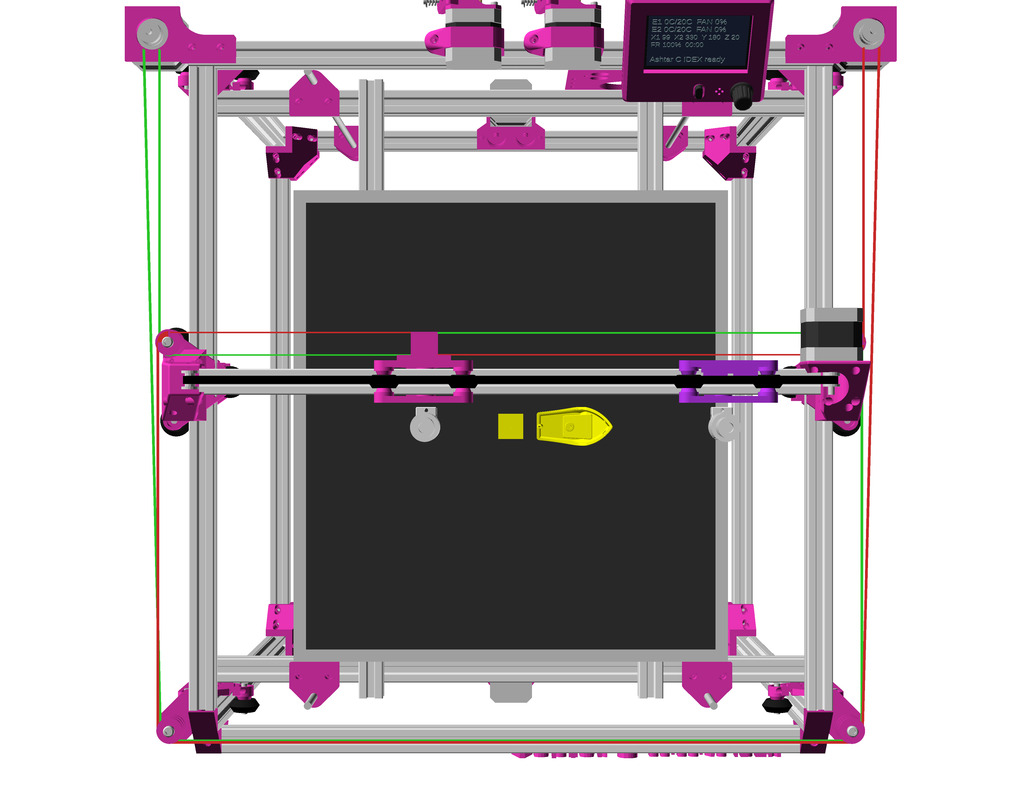
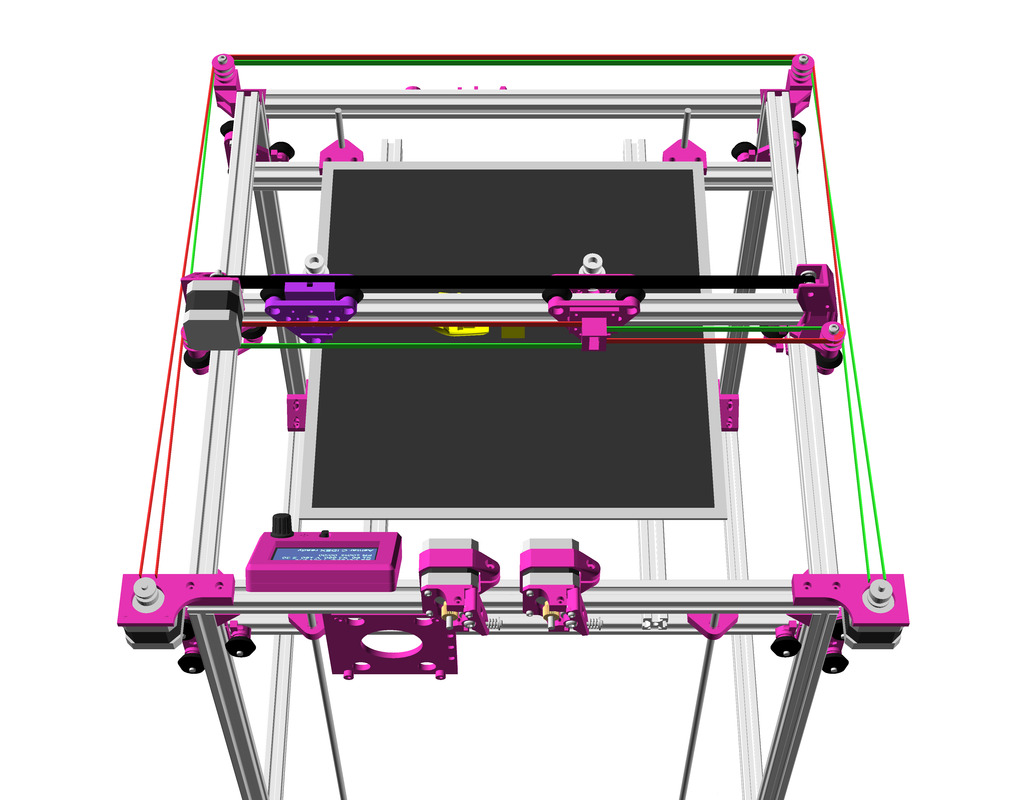
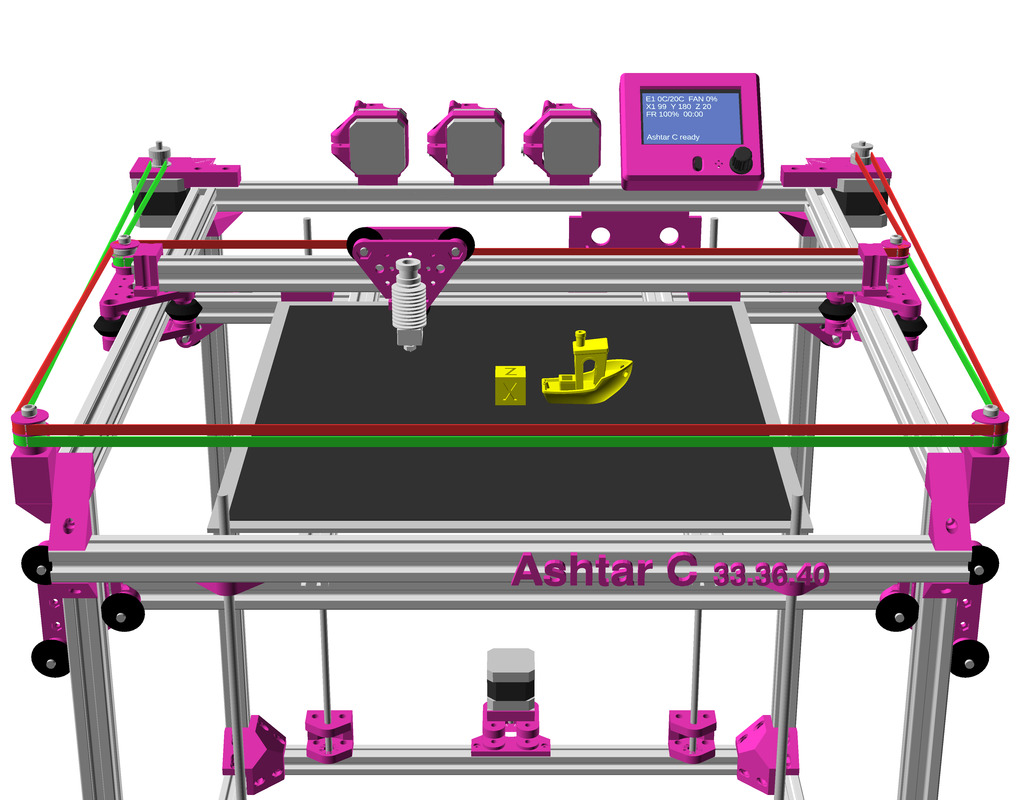
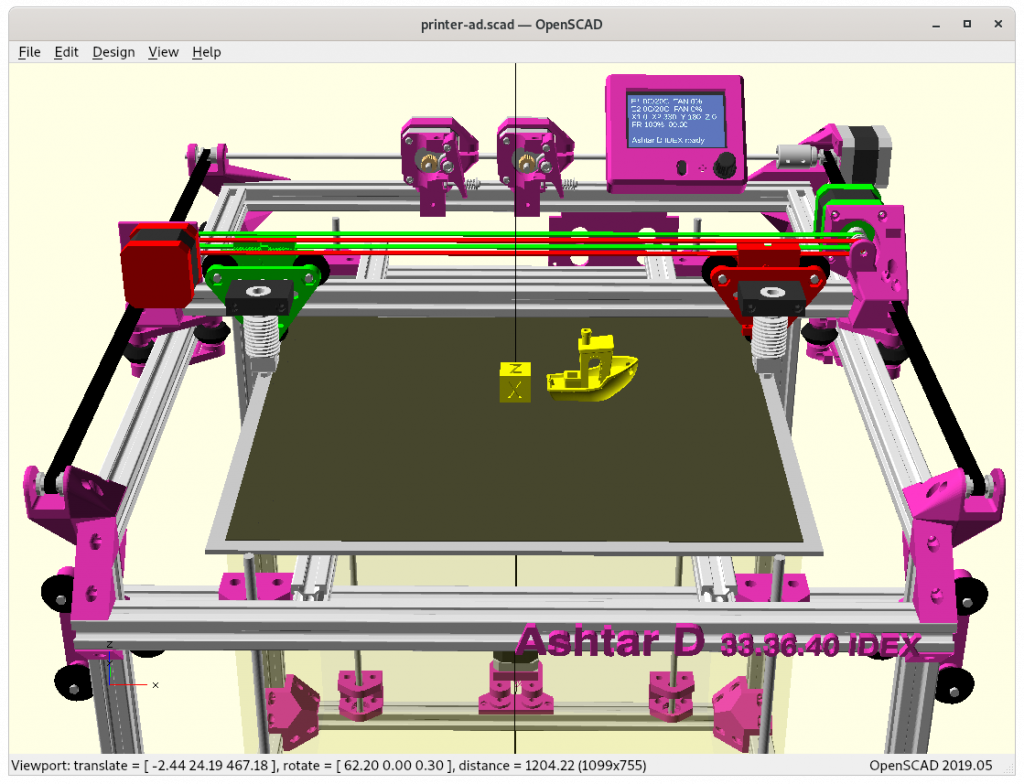
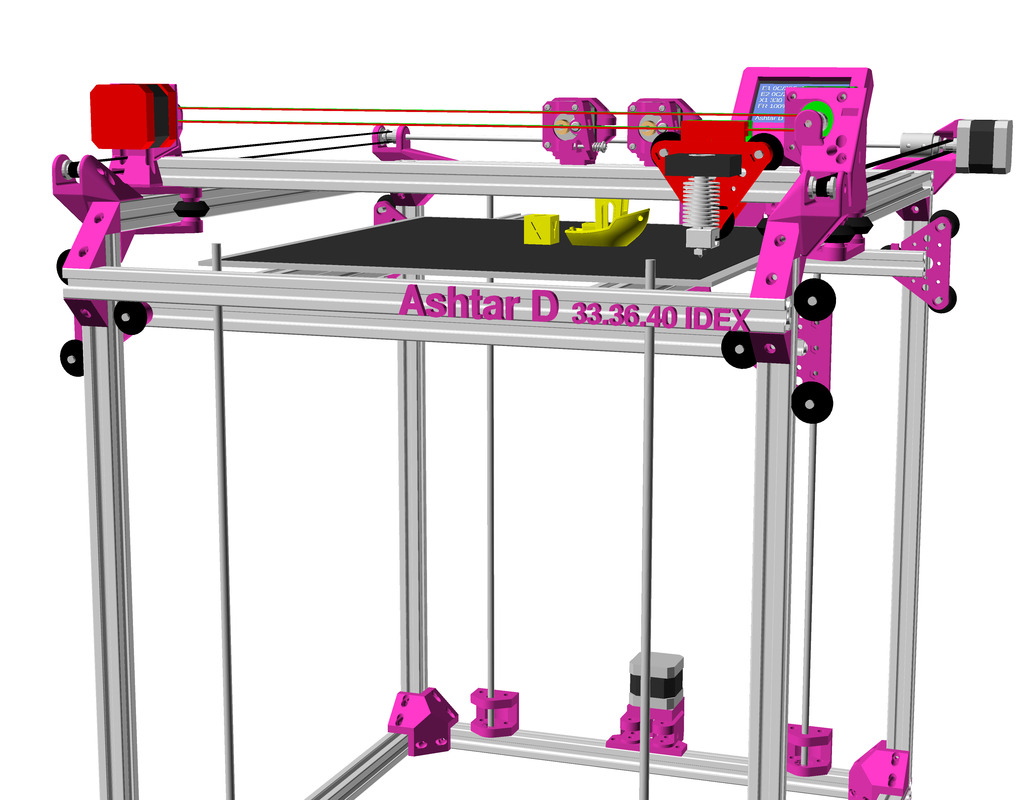
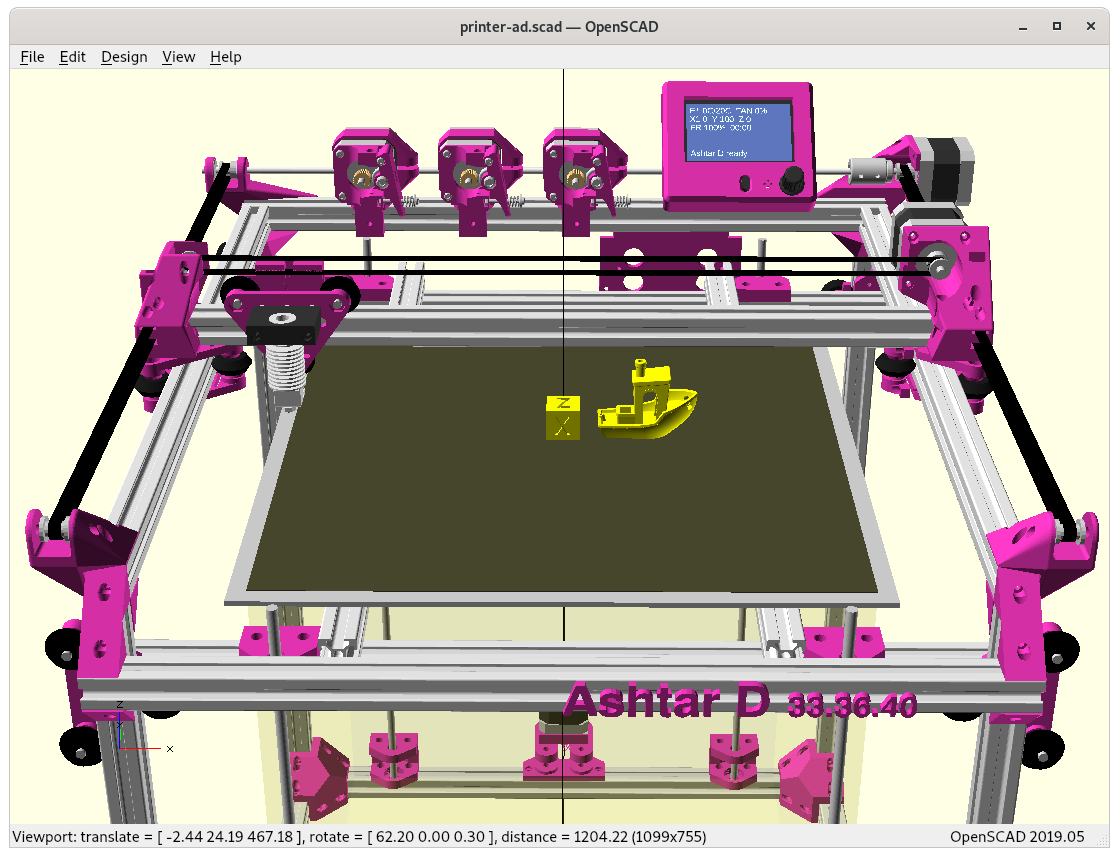
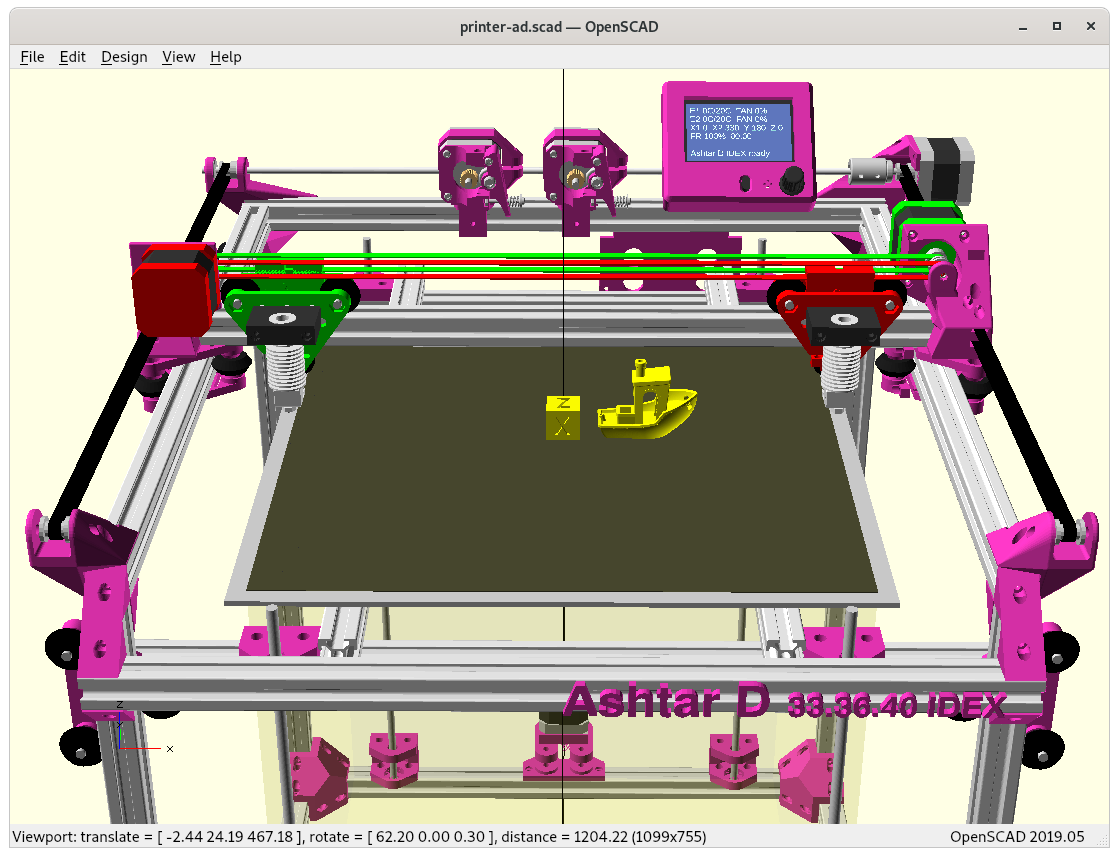
Ashtar KAshtar K IDEXAshtar MAshtar M IDEXAshtar DAshtar D IDEXAshtar CAshtar C IDEX
Ashtar K IDEX has been fairly easy, as I was using an improved “old” design of the X motor mount for the 2nd motor and 2nd belt, and since Ashtar M IDEX is using the same XZ frame, it was a matter of a few minutes to port that option as well.
Ashtar D IDEX with Classic XY belt routing was more tricky as there was little space left to add another motor, so I realized I need to utilize what’s there and take advantage of it – result is a very space saving solution, but it needs to be verified in real life first.
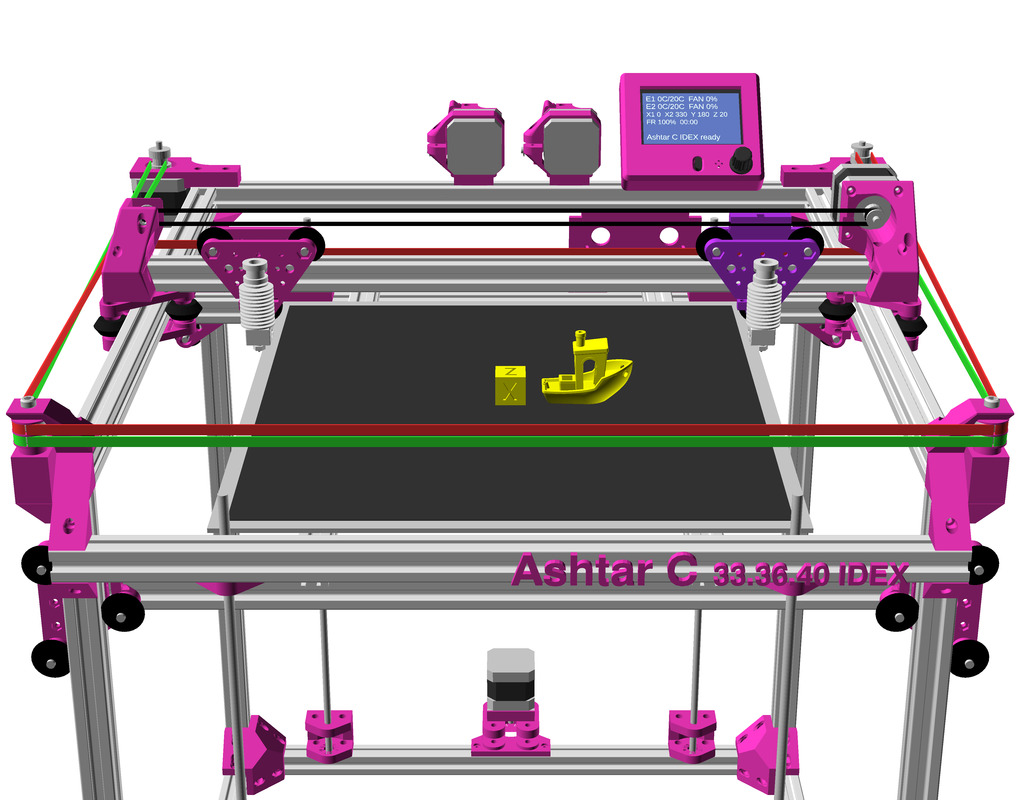
Ashtar C IDEX with Core XY with an additional X motor was easy, I just reused a slightly altered X motor/pulley mount of Ashtar D, so that was done fairly quickly as well, yet the challenge will be the firmware support, as currently (2021/01) only Duet RepRap firmware supports the CoreXYU as my design falls under.
Features of IDEX
Pros:
double printing: duplicate or mirror mode
double printing volume at same duration
two materials with different melting points
two colors (non-mixing) with
more reliable than dual nozzle setups, as inactive nozzle does not run over existing printed piece often
in theory no purge block, but if ooze shields are shared among switching extrusions (more than 2 extrusions) there may be cross-contamination between colors/materials
the printheads individually are proven to be reliable
Hints:
single heatblock = same print temperature
dual heatblock = different print temperatures possible
dual nozzle = different nozzle sizes possible
Hardware Requirements
1x NEMA 17 42-45Nm with wire, extra stepper motor driver on motherboard
100-110cm long 6mm wide GT2 belt
1x pulley and 1x idler
1x hotend (nozzle, heatblock, heat cartridge, heatbreak, heatsink), extra heating connector on motherboard
Well, after the IDEX option designs – still as drafts – worked for Ashtar K (Prusa i3), Ashtar M (Moving Gantry) and Ashtar D (Classic XY), I thought, why not also target Ashtar C (Core XY).
Ashtar D IDEX is definitely a narrow design, so I thought to reuse two parts of it for Ashtar C as well, and hopefully the A and B belts route around – and well, it seems mechanically to work out.
On the firmware part it seems this CoreXY plus additional X motor is called CoreXYU and supported by Duet RepRap firmware – but details need to be researched in more depth. On the first glance the “traditional” CoreXYU setup routes the U belt off the X beam and not place a motor on it as I do, but routes at the end of the frames so the motor is stationary – definitely something also to look at.
Draft
The A/B belts route around the new X motor mount (borrowed from Ashtar D design)
. .. and also around the X idler holder.
Gallery
Issues to Resolve
Firmware supporting CoreXY IDEX:
E1: X & Y provided through CoreXY by motors A & B
E2: X provided by X motor, Y provided by CoreXY where X=0 remains (both motors A & B have to operate to provide X=0 while Y is moved)
Duet RepRap firmware provides CoreXYU support, and it seems it would cover my use case here
Marlin firmware as of 2.x does not support CoreXYU yet
Moving the X motor – or U motor as in CoreXYU context – off the X beam and route a much longer belt and place the motor stationary like the motors A & B of CoreXY
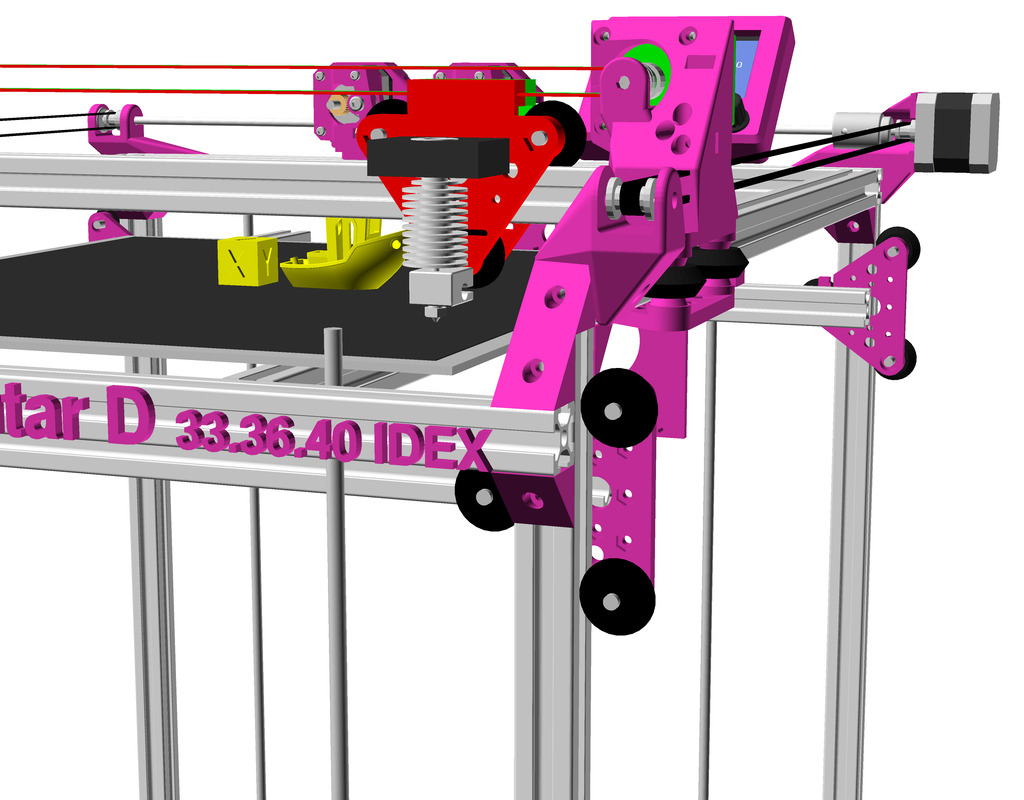
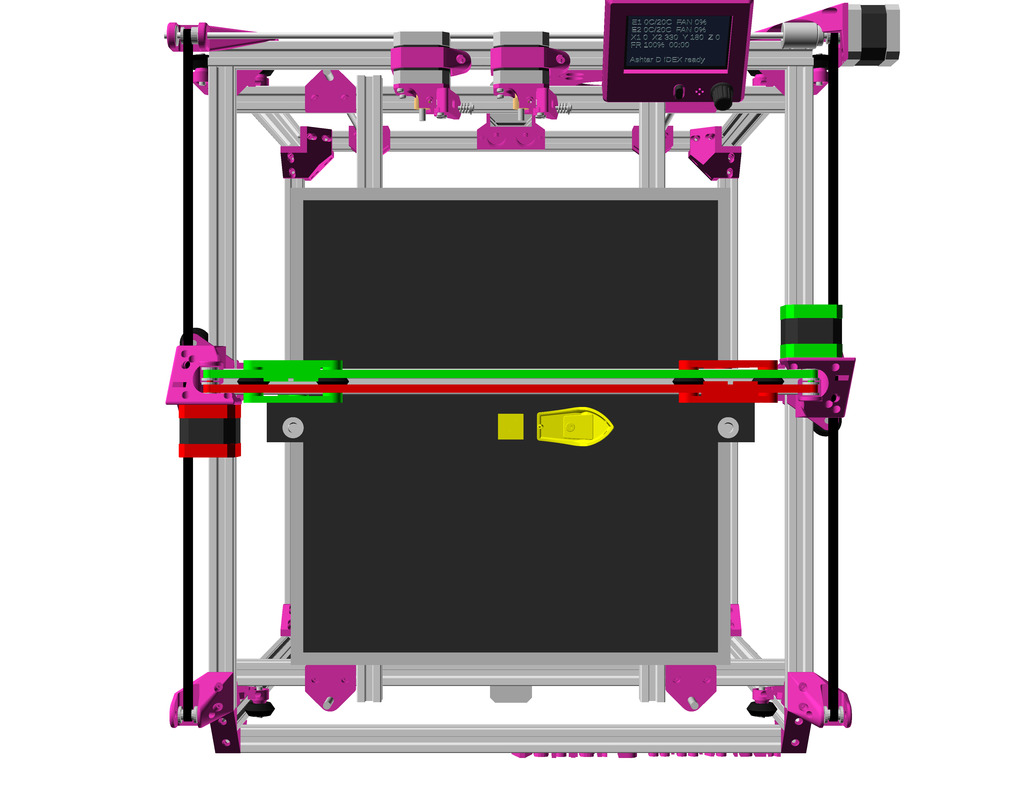
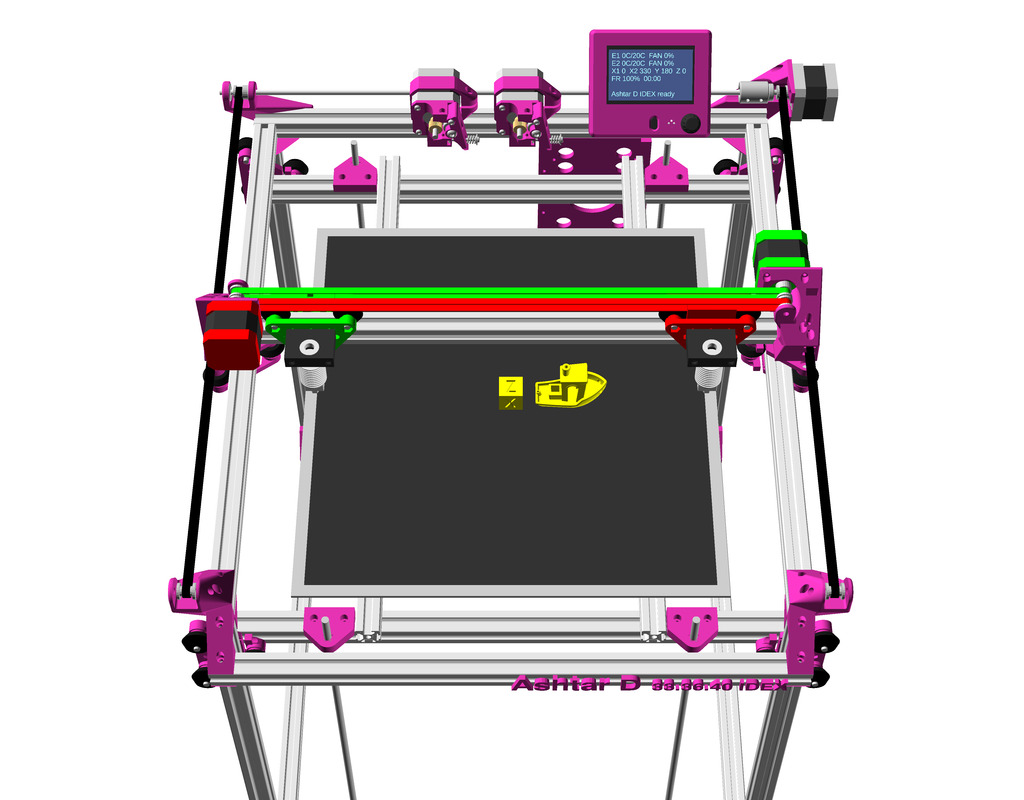
After just few hours working on IDEX option for Ashtar K and Ashtar M, I thought to try myself on doing IDEX on the very delicate Y carriage on Ashtar D – and after an hour roughly I realized, perhaps it is doable.
The main idea is to reuse the NEMA17 shaft as axis for the idler of the 2nd belt, and use 3mm diameter shaft with 5-10mm length as extension, and stabilize the extension in the idler itself likely the shaft seems long enough by itself – the most space saving option:
Reusing NEMA 17 shaft as axis for idler
Reusing NEMA 17 shaft as axis for idler (see through)
If possible, rotate entire X motor mount / carriage and mount it on the other X side.
Draft
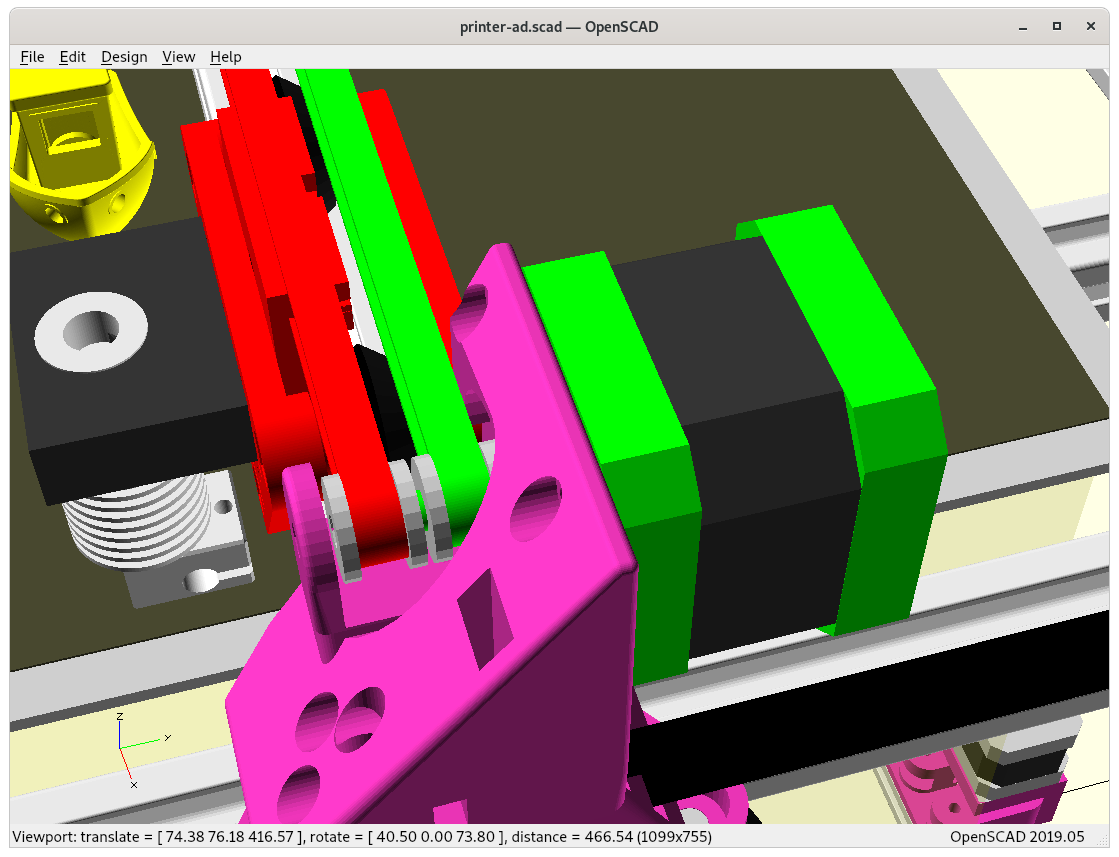
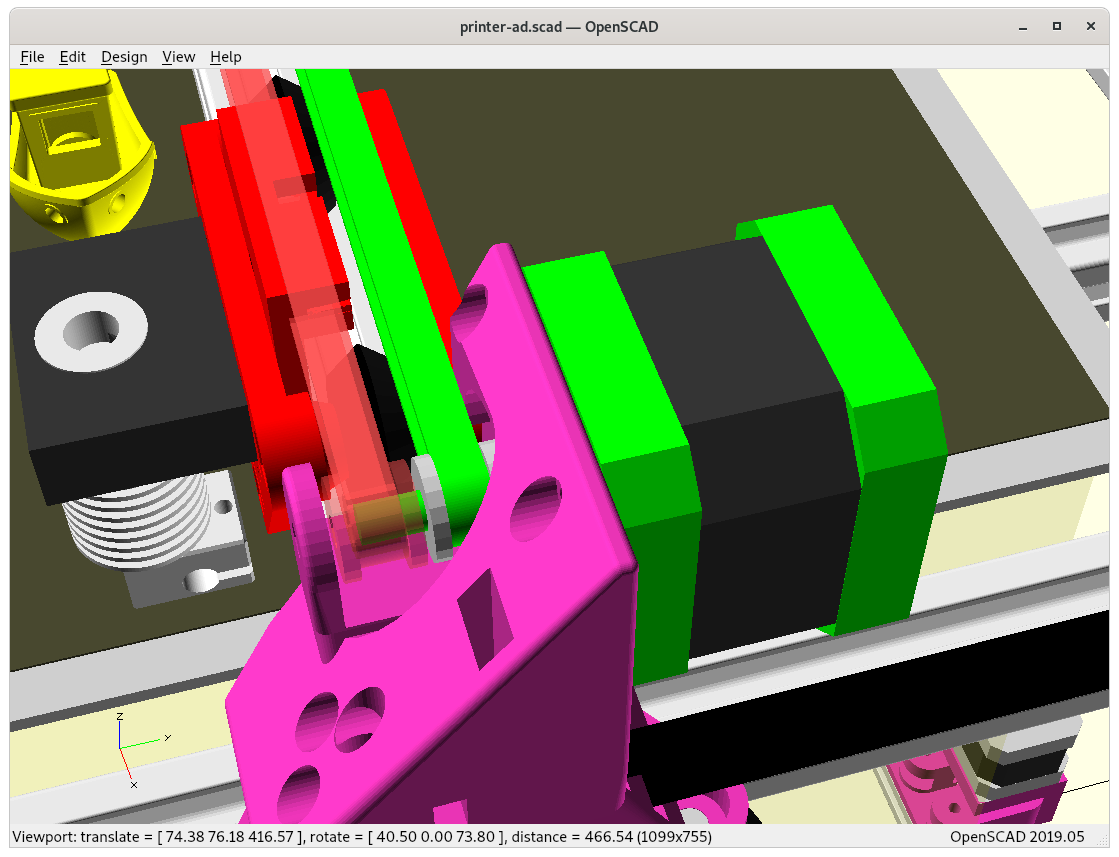
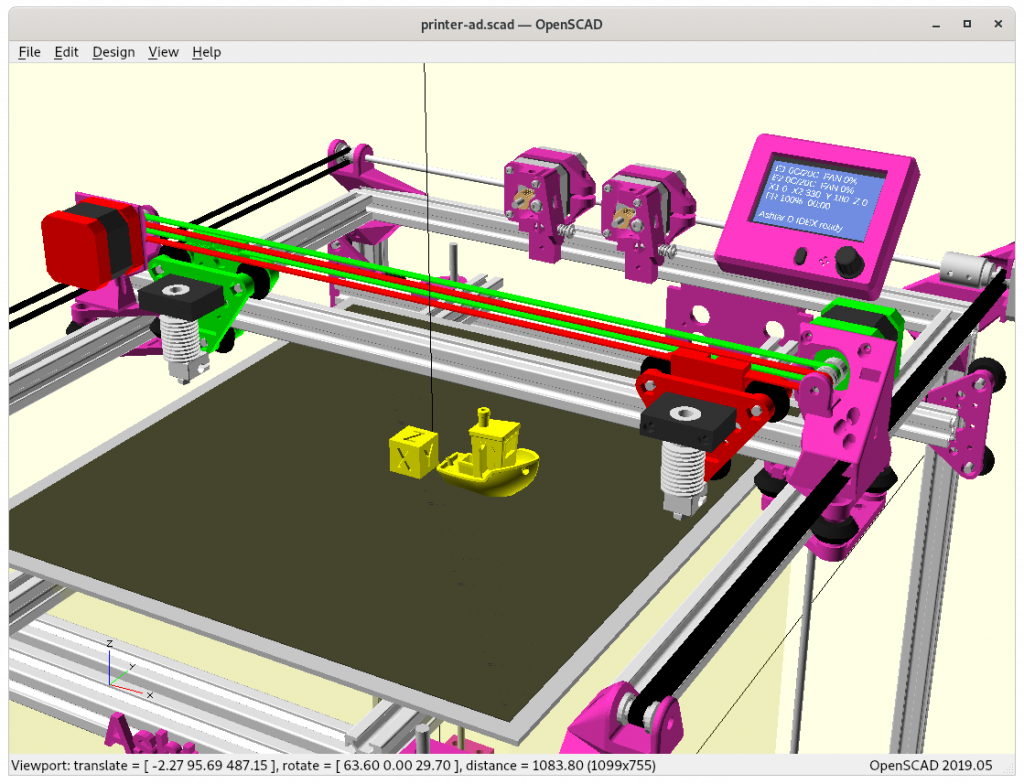
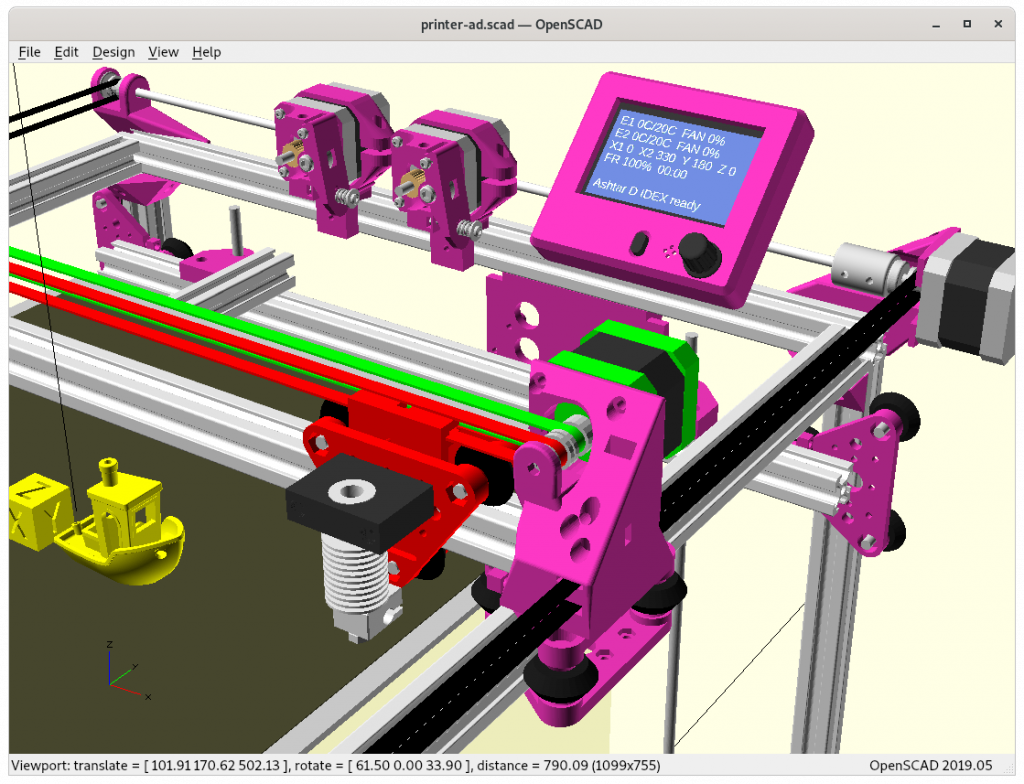
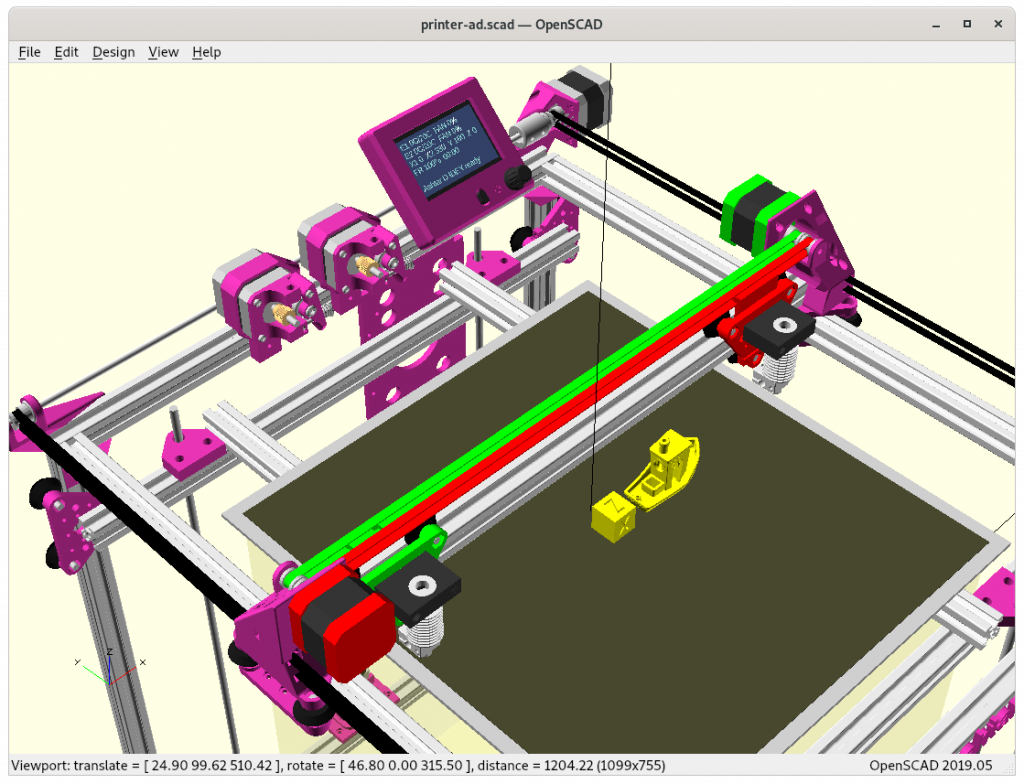
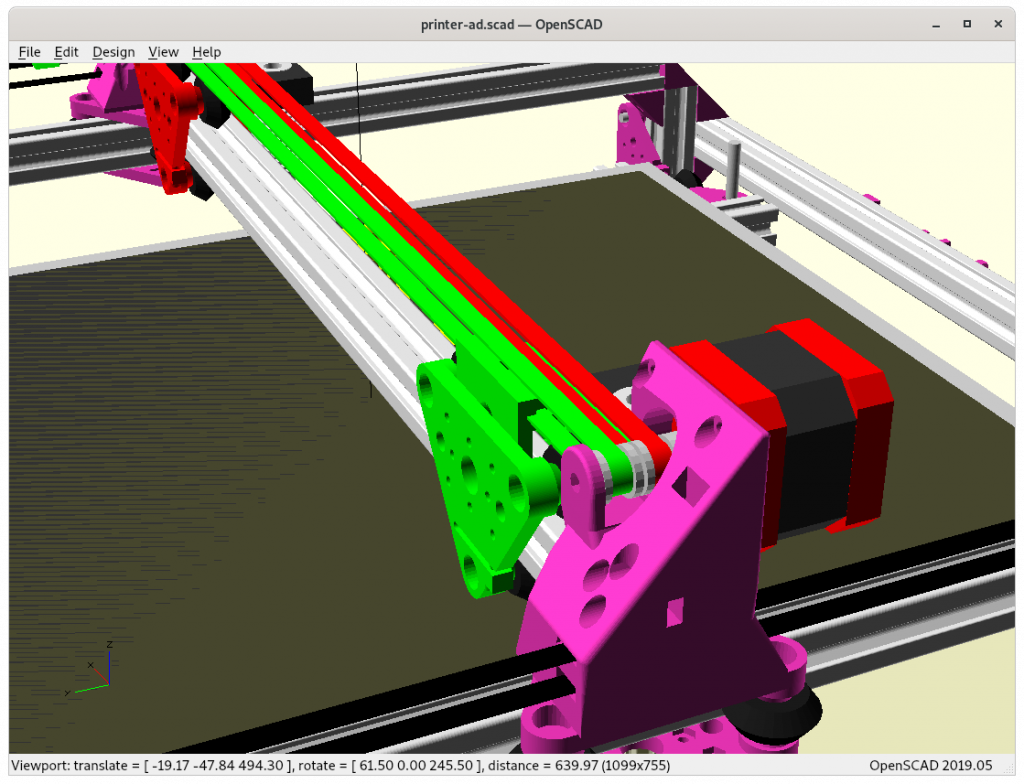
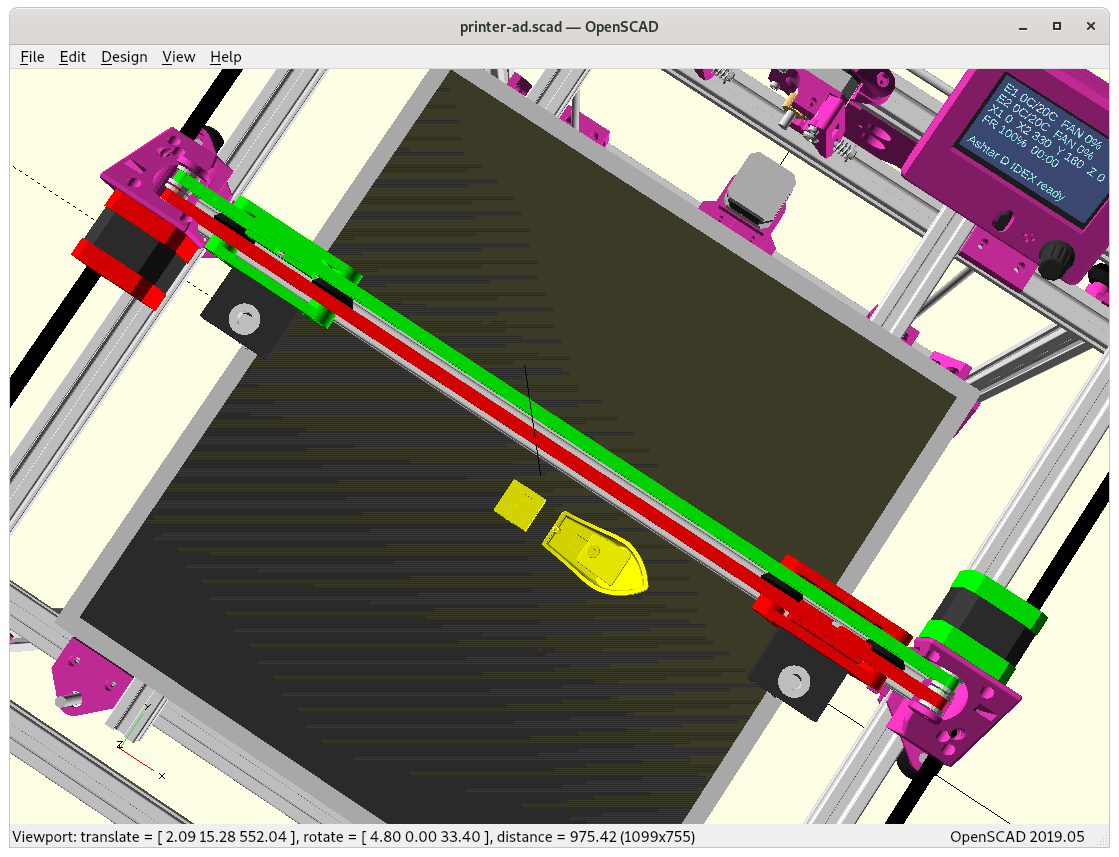
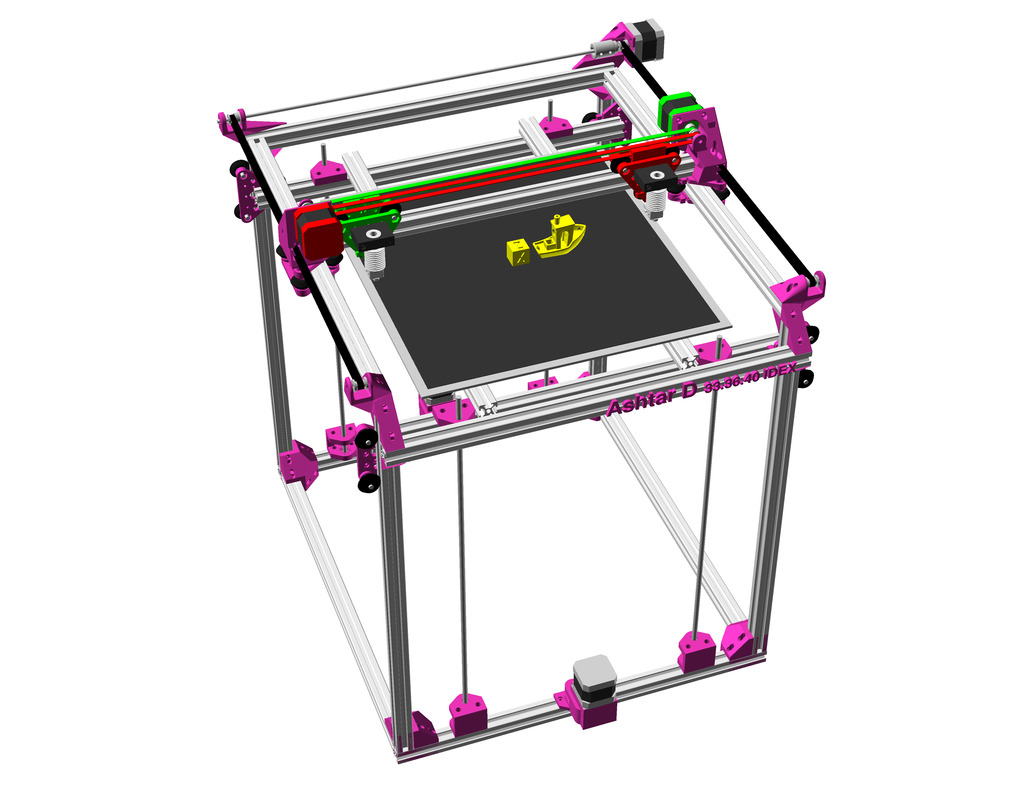
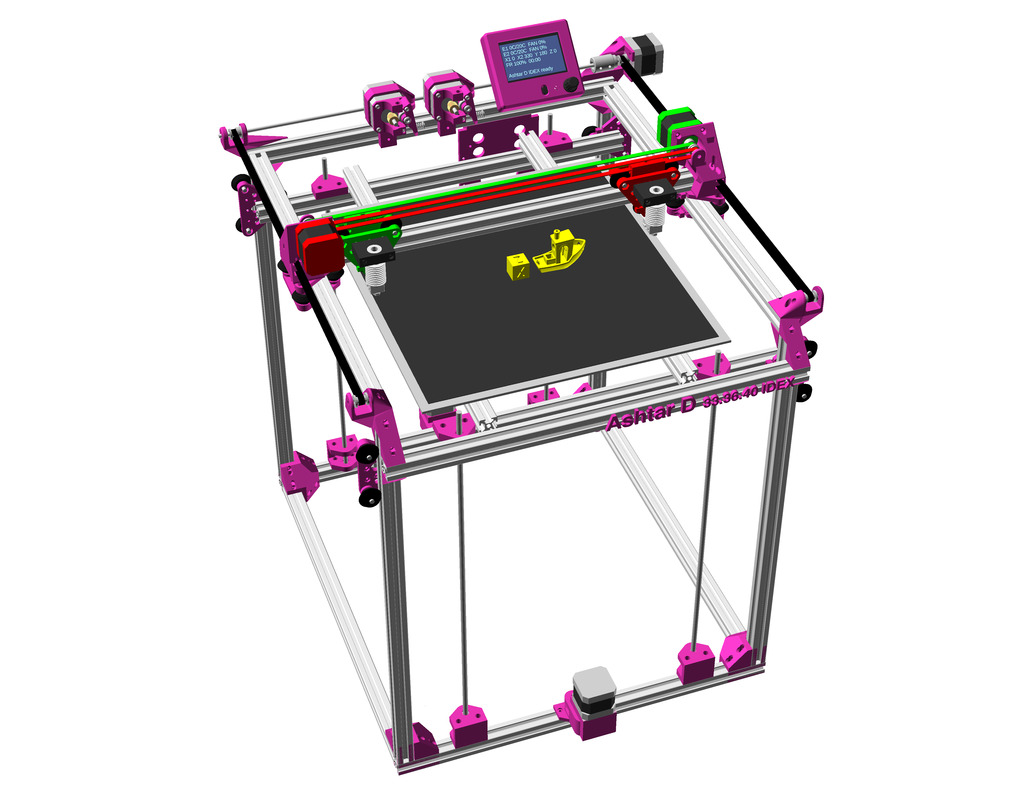
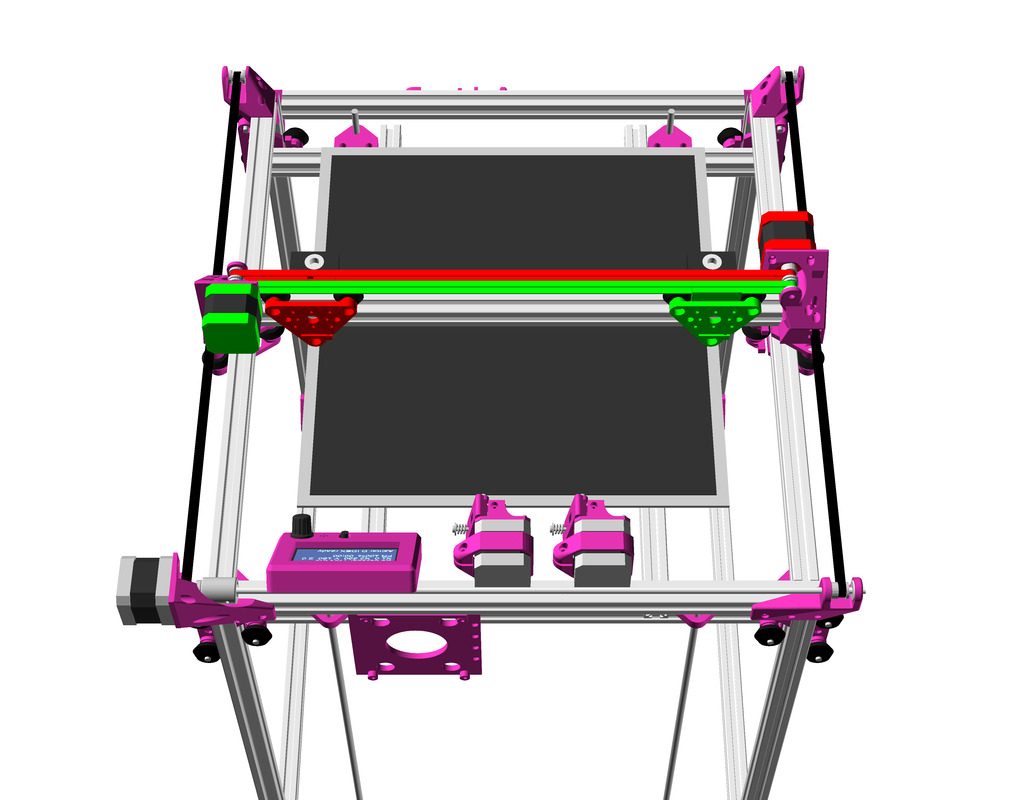
I had to color the belts and V modules, as I otherwise get confused while fine-tuning the design within such narrow margins:
X1/E1 in green
X2/E2 in red
I just love symmetry! I just love symmetry!
Gallery
Issues to Resolve
X motor-mount isn’t fully Y symmetric yet, it’s off by a few mm; needs some further fine-tuning until X2 motor-mount mounting holes align with V module, resolved
V module belt mount for X2 needs be adapted, as I can’t mirror it as that “back” mirrored is the “front” side where the printhead is mounted and occupied already, a new piece is required which mounts within the V module